

Colophon
Copyright © 2020-2024 Raspberry Pi Ltd (formerly Raspberry Pi (Trading) Ltd.)
The documentation of the RP2350 microcontroller is licensed under a Creative Commons Attribution-NoDerivatives 4.0
International (CC BY-ND).
build-date: 2024-08-21
build-version: 522d2d4-clean
About the SDK
Throughout the text "the SDK" refers to our Raspberry Pi Pico SDK. More details about the SDK can be
found throughout this book. Source code included in the documentation is Copyright © 2023-2024
Raspberry Pi Ltd (formerly Raspberry Pi (Trading) Ltd.) and licensed under the 3-Clause BSD license.
Legal disclaimer notice
TECHNICAL AND RELIABILITY DATA FOR RASPBERRY PI PRODUCTS (INCLUDING DATASHEETS) AS MODIFIED FROM
TIME TO TIME (“RESOURCES”) ARE PROVIDED BY RASPBERRY PI LTD (“RPL”) "AS IS" AND ANY EXPRESS OR IMPLIED
WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
FOR A PARTICULAR PURPOSE ARE DISCLAIMED. TO THE MAXIMUM EXTENT PERMITTED BY APPLICABLE LAW IN NO
EVENT SHALL RPL BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER
IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF
THE USE OF THE RESOURCES, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
RPL reserves the right to make any enhancements, improvements, corrections or any other modifications to the
RESOURCES or any products described in them at any time and without further notice.
The RESOURCES are intended for skilled users with suitable levels of design knowledge. Users are solely responsible for
their selection and use of the RESOURCES and any application of the products described in them. User agrees to
indemnify and hold RPL harmless against all liabilities, costs, damages or other losses arising out of their use of the
RESOURCES.
RPL grants users permission to use the RESOURCES solely in conjunction with the Raspberry Pi products. All other use
of the RESOURCES is prohibited. No licence is granted to any other RPL or other third party intellectual property right.
HIGH RISK ACTIVITIES. Raspberry Pi products are not designed, manufactured or intended for use in hazardous
environments requiring fail safe performance, such as in the operation of nuclear facilities, aircraft navigation or
communication systems, air traffic control, weapons systems or safety-critical applications (including life support
systems and other medical devices), in which the failure of the products could lead directly to death, personal injury or
severe physical or environmental damage (“High Risk Activities”). RPL specifically disclaims any express or implied
warranty of fitness for High Risk Activities and accepts no liability for use or inclusions of Raspberry Pi products in High
Risk Activities.
Raspberry Pi products are provided subject to RPL’s Standard Terms. RPL’s provision of the RESOURCES does not
expand or otherwise modify RPL’s Standard Terms including but not limited to the disclaimers and warranties
expressed in them.
Raspberry Pi Pico-series C/C++ SDK
Legal disclaimer notice 1

Table of contents
Colophon . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê1
Legal disclaimer notice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê1
1. About the SDK. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê8
1.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê8
1.2. Anatomy of a SDK Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê8
2. SDK architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê11
2.1. The Build System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê11
2.2. Every Library is an INTERFACE Library. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê12
2.3. SDK Library Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê13
2.3.1. Higher-level Libraries. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê13
2.3.2. Runtime Support Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê13
2.3.3. Hardware Support Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê14
2.3.4. Hardware Structs Library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê15
2.3.5. Hardware Registers Library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê16
2.3.6. TinyUSB Port. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê17
2.3.7. FreeRTOS Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê17
2.3.8. Wi-Fi on Pico W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê18
2.3.9. Bluetooth on Pico W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê18
2.4. Directory Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê19
2.4.1. Locations of Files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê19
2.5. Conventions for Library Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê21
2.5.1. Function Naming Conventions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê21
2.5.2. Return Codes and Error Handling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê22
2.5.3. Use of Inline Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê23
2.5.4. Builder Pattern for Hardware Configuration APIs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê23
2.6. Customisation and Configuration Using Preprocessor variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê24
2.6.1. Preprocessor Variables via Board Configuration File . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê24
2.6.2. Preprocessor Variables Per Binary or Library via CMake . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê25
2.7. SDK Runtime . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê25
2.7.1. Standard Input/Output (stdio) Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê25
2.7.2. Printf Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê26
2.7.3. Runtime Initialization and Linking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê26
2.7.4. C-Library Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê26
2.7.5. Floating-point Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê26
2.7.6. Hardware Divider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê27
2.8. Multi-core support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê28
2.9. Using C++. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê29
2.10. Supporting both RP2040 and RP2350 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê29
2.11. Next Steps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê30
3. Using programmable I/O (PIO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê31
3.1. What is Programmable I/O (PIO)?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê31
3.1.1. Background. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê31
3.1.2. I/O Using dedicated hardware on your PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê31
3.1.3. I/O Using dedicated hardware on your Raspberry Pi or microcontroller. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê31
3.1.4. I/O Using software control of GPIOs ("bit-banging") . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê32
3.1.5. Programmable I/O Hardware using FPGAs and CPLDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê33
3.1.6. Programmable I/O Hardware using PIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê33
3.2. Getting started with PIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê34
3.2.1. A First PIO Application . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê34
3.2.2. A Real Example: WS2812 LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê38
3.2.3. PIO and DMA (A Logic Analyser) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê46
3.2.4. Further examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê50
3.3. Using PIOASM, the PIO Assembler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê51
3.3.1. Usage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê51
3.3.2. Directives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê52
Raspberry Pi Pico-series C/C++ SDK
Table of contents 2

3.3.3. Values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê54
3.3.4. Expressions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê54
3.3.5. Comments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê54
3.3.6. Labels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê55
3.3.7. Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê55
3.3.8. Pseudoinstructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê56
3.3.9. Output pass through . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê56
3.3.10. Language generators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê56
3.4. PIO Instruction Set Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê62
3.4.1. Encoding (version 0, RP2040) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê62
3.4.2. Encoding (version 1, RP2350) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê62
3.4.3. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê63
3.4.4. JMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê63
3.4.5. WAIT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê64
3.4.6. IN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê65
3.4.7. OUT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê66
3.4.8. PUSH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê67
3.4.9. PULL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê68
3.4.10. MOV (to RX) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê69
3.4.11. MOV (from RX). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê70
3.4.12. MOV. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê71
3.4.13. IRQ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê72
3.4.14. SET . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê73
4. Library documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê75
4.1. Hardware APIs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê76
4.1.1. hardware_adc. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê77
4.1.2. hardware_base. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê82
4.1.3. hardware_claim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê84
4.1.4. hardware_clocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê86
4.1.5. hardware_divider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê101
4.1.6. hardware_dcp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê110
4.1.7. hardware_dma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê110
4.1.8. hardware_exception . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê132
4.1.9. hardware_flash. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê135
4.1.10. hardware_gpio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê138
4.1.11. hardware_hazard3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê169
4.1.12. hardware_i2c . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê169
4.1.13. hardware_interp. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê178
4.1.14. hardware_irq . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê187
4.1.15. hardware_pio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê200
4.1.16. hardware_pll. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê241
4.1.17. hardware_powman . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê242
4.1.18. hardware_pwm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê249
4.1.19. hardware_resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê263
4.1.20. hardware_riscv . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê268
4.1.21. hardware_riscv_platform_timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê268
4.1.22. hardware_rtc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê270
4.1.23. hardware_rcp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê273
4.1.24. hardware_spi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê273
4.1.25. hardware_sha256 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê281
4.1.26. hardware_sync. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê285
4.1.27. hardware_ticks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê293
4.1.28. hardware_timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê295
4.1.29. hardware_uart . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê310
4.1.30. hardware_vreg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê320
4.1.31. hardware_watchdog . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê320
4.1.32. hardware_xosc. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê324
4.2. High Level APIs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê324
4.2.1. pico_aon_timer. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê325
4.2.2. pico_async_context. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê328
Raspberry Pi Pico-series C/C++ SDK
Table of contents 3

4.2.3. pico_bootsel_via_double_reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê339
4.2.4. pico_flash . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê339
4.2.5. pico_i2c_slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê341
4.2.6. pico_multicore . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê343
4.2.7. pico_rand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê355
4.2.8. pico_sha256 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê357
4.2.9. pico_stdlib . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê361
4.2.10. pico_sync . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê364
4.2.11. pico_time . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê378
4.2.12. pico_unique_id . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê400
4.2.13. pico_util . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê401
4.3. Third-party Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê405
4.3.1. tinyusb_device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê405
4.3.2. tinyusb_host . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê405
4.4. Networking Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê405
4.4.1. pico_btstack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê406
4.4.2. pico_lwip. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê408
4.4.3. pico_cyw43_driver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê410
4.4.4. pico_cyw43_arch . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê412
4.5. Runtime Infrastructure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê450
4.5.1. boot_stage2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê451
4.5.2. pico_atomic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê451
4.5.3. pico_base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê451
4.5.4. pico_binary_info. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê453
4.5.5. pico_bootrom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê453
4.5.6. pico_bit_ops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê458
4.5.7. pico_cxx_options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê459
4.5.8. pico_clib_interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê459
4.5.9. pico_crt0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê459
4.5.10. pico_divider . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê459
4.5.11. pico_double . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê467
4.5.12. pico_float . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê468
4.5.13. pico_int64_ops. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê468
4.5.14. pico_malloc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê468
4.5.15. pico_mem_ops. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê469
4.5.16. pico_platform. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê469
4.5.17. pico_printf. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê477
4.5.18. pico_runtime . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê477
4.5.19. pico_runtime_init . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê478
4.5.20. pico_stdio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê479
4.5.21. pico_standard_binary_info . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê489
4.5.22. pico_standard_link. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê490
4.6. External API Headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê490
4.6.1. boot_picobin_headers. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê490
4.6.2. boot_picoboot_headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê490
4.6.3. boot_uf2_headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê490
4.6.4. pico_usb_reset_interface_headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê491
5. SDK configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê492
5.1. Full List of SDK Configuration Defines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê493
6. CMake build configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê506
6.1. Full List of SDK Configuration Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê506
6.2. Platform and Board Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê508
6.3. Compiler and Toolchain Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê509
6.3.1. Variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê509
6.4. Binary Type configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê510
7. CMake build functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê512
7.1. Control of picotool post-processing (not available on RP2040) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê512
8. Board configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê513
8.1. The Configuration files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê513
8.2. Building applications with a custom board configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê515
Raspberry Pi Pico-series C/C++ SDK
Table of contents 4

8.3. Available configuration parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê515
9. Embedded Binary Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê516
9.1. Basic information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê516
9.2. Pins. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê516
9.3. Full Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê517
9.4. Including Binary Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê517
9.5. Setting Common Information from CMake . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê519
Appendix A: App Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê521
Attaching a 7 segment LED via GPIO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê521
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê521
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê521
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê523
DHT-11, DHT-22, and AM2302 Sensors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê524
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê524
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê525
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê527
Attaching a 16x2 LCD via TTL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê527
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê528
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê528
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê531
Attaching a microphone using the ADC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê532
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê532
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê533
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê534
Attaching a BME280 temperature/humidity/pressure sensor via SPI. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê535
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê535
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê535
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê540
Attaching a MPU9250 accelerometer/gyroscope via SPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê540
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê540
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê541
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê544
Attaching a MPU6050 accelerometer/gyroscope via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê544
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê544
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê545
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê547
Attaching a 16x2 LCD via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê547
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê548
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê548
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê551
Attaching a BMP280 temp/pressure sensor via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê552
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê552
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê552
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê557
Attaching a LIS3DH Nano Accelerometer via i2c. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê557
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê558
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê558
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê561
Attaching a MCP9808 digital temperature sensor via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê561
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê561
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê562
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê564
Attaching a MMA8451 3-axis digital accelerometer via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê565
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê565
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê565
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê568
Attaching an MPL3115A2 altimeter via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê568
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê569
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê569
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê573
Raspberry Pi Pico-series C/C++ SDK
Table of contents 5

Attaching an OLED display via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê573
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê574
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê575
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê585
Attaching a PA1010D Mini GPS module via I2C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê585
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê585
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê586
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê589
Attaching a PCF8523 Real Time Clock via I2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê589
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê589
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê590
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê593
Interfacing 1-Wire devices to the Pico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê593
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê594
Bill of materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê594
List of files. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê595
Communicating as master and slave via SPI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê602
Wiring information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê602
Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê602
List of Files . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê604
Bill of Materials. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê608
Appendix B: Building the SDK API documentation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê609
Appendix C: SDK release history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê611
Release 1.0.0 (20/Jan/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê611
Release 1.0.1 (01/Feb/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê611
Boot Stage 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê611
Release 1.1.0 (05/Mar/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê611
Backwards incompatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
Release 1.1.1 (01/Apr/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
Release 1.1.2 (07/Apr/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
Release 1.2.0 (03/Jun/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
New/improved Board headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
Updated TinyUSB to 0.10.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê612
Added CMSIS core headers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê613
API improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê613
General code improvements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
SVD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
pioasm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
RTOS interoperability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
CMake build changes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
Boot Stage 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
Release 1.3.0 (02/Nov/2021) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
Updated TinyUSB to 0.12.0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê615
New Board Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê616
Updated SVD, hardware_regs, hardware_structs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê616
Behavioural Changes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê617
Other Notable Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê617
CMake build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê619
pioasm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê619
elf2uf2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê619
Release 1.3.1 (18/May/2022). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê619
New Board Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê619
Notable Library Changes/Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê620
Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
pioasm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
elf2uf2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
Release 1.4.0 (30/Jun/2022) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
New Board Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
Wireless Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê621
Notable Library Changes/Improvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê622
Raspberry Pi Pico-series C/C++ SDK
Table of contents 6

Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê624
Release 1.5.0 (11/Feb/2023) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê624
New Board Support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê624
Library Changes/Improvements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê624
New Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê627
Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê628
Bluetooth Support for Pico W (BETA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê628
Release 1.5.1 (14/Jun/2023) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê629
Board Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê629
Library Changes/Improvements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê629
New Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê630
Miscellaneous. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê631
Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê631
Bluetooth Support for Pico W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê631
Release 2.0.0 (08/Aug/2024) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê632
Notices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê632
Major New Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê632
Security and Code Signing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê633
Board Support. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê633
New Libraries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê634
Library Changes / Improvements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê637
pico_bt_stack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê643
FreeRTOS integration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê647
Backwards Incompatibilities. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê648
Build . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê648
Building Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê649
Fixed Issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê649
Appendix D: Documentation release history. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Ê650
Raspberry Pi Pico-series C/C++ SDK
Table of contents 7

Chapter 1. About the SDK
1.1. Introduction
The SDK (Software Development Kit) provides the headers, libraries and build system necessary to write programs for
RP-series microcontroller-based devices such as Raspberry Pi Pico or Raspberry Pi Pico 2 in C, C++ or Arm assembly
language.
The SDK is designed to provide an API and programming environment that is familiar both to non-embedded C
developers and embedded C developers alike. A single program runs on the device at a time with a conventional main()
method. Standard C/C++ libraries are supported along with APIs for accessing the RP-series microcontroller’s
hardware, including DMA, IRQs, and the wide variety fixed function peripherals and PIO (Programmable IO).
Additionally, the SDK provides higher level libraries for dealing with timers, synchronization, Wi-Fi and Bluetooth
networking, USB and multicore programming. These libraries should be comprehensive enough that your application
code rarely, if at all, needs to access hardware registers directly. However, if you do need or prefer to access the raw
hardware registers, you will also find complete and fully-commented register definition headers in the SDK. There’s no
need to look up addresses in the datasheet.
The SDK can be used to build anything from simple applications, fully-fledged runtime environments such as
MicroPython, to low level software such as the RP-series microcontroller’s on-chip bootrom itself.
The design goal for entire SDK is to be simple but powerful.
Looking to get started?
This book documents the SDK APIs, explains the internals and overall design of the SDK, and explores
some deeper topics like using the PIO assembler to build new interfaces to external hardware. For a
quick start with setting up the SDK and writing SDK programs, Getting started with Raspberry Pi Pico-
series is the best place to start.
1.2. Anatomy of a SDK Application
Before going completely depth-first in our traversal of the SDK, it’s worth getting a little breadth by looking at one of the
SDK examples covered in Getting started with Raspberry Pi Pico-series, in more detail.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/blink_simple/blink_simple.c
Ê1 /**
Ê2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Ê7 #include "pico/stdlib.h"
Ê8
Ê9 #ifndef LED_DELAY_MS
10 #define LED_DELAY_MS 250
11 #endif
12
13 // Initialize the GPIO for the LED
14 void pico_led_init(void) {
15 // A device like Pico that uses a GPIO for the LED will define PICO_DEFAULT_LED_PIN
16 // so we can use normal GPIO functionality to turn the led on and off
Raspberry Pi Pico-series C/C++ SDK
1.1. Introduction 8

17 gpio_init(PICO_DEFAULT_LED_PIN);
18 gpio_set_dir(PICO_DEFAULT_LED_PIN, GPIO_OUT);
19 }
20
21 // Turn the LED on or off
22 void pico_set_led(bool led_on) {
23 // Just set the GPIO on or off
24 gpio_put(PICO_DEFAULT_LED_PIN, led_on);
25 }
26
27 int main() {
28 pico_led_init();
29 while (true) {
30 pico_set_led(true);
31 sleep_ms(LED_DELAY_MS);
32 pico_set_led(false);
33 sleep_ms(LED_DELAY_MS);
34 }
35 }
This program consists only of a single C file, with three functions. As with almost any C programming environment, the
function called main() is special, and is the point where the language runtime first hands over control to your program. In
the SDK the main() function does not take any arguments. It’s quite common for the main() function not to return, as is
shown here.
NOTE
The return code of main() is ignored by the SDK runtime, and the default behaviour is to hang the processor on exit.
At the top of the C file, we include a header called pico/stdlib.h. This is an umbrella header that pulls in some other
commonly used headers. In particular, the ones needed here are hardware/gpio.h, which is used for accessing the general
purpose IOs on RP-series microcontrollers (the gpio_xxx functions here), and pico/time.h which contains, among other
things, the sleep_ms function. Broadly speaking, a library whose name starts with pico provides high level APIs and
concepts, or aggregates smaller interfaces; a name beginning with hardware indicates a thinner abstraction between your
code and the RP-series microcontroller on-chip hardware.
So, using mainly the hardware_gpio and pico_time libraries, this C program will blink an LED connected to the default LED
GPIO (which exact pin varies from one RP-series microcontroller board to another) on and off, twice per second, forever
(or at least until unplugged). In the directory containing the C file (you can click the link above the source listing to go
there), there is one other file which lives alongside it.
Directory listing of pico-examples/blink_simple
blink_simple
├── blink_simple.c
└── CMakeLists.txt
0 directories, 2 files
The second file is a CMake file, which tells the SDK how to turn the C file into a binary application for an RP-series
microcontroller-based board. Later sections will detail exactly what CMake is, and why it is used, but we can look at the
contents of this file without getting mired in those details.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/blink_simple/CMakeLists.txt
Ê1 add_executable(blink_simple
Ê2 blink_simple.c
Ê3 )
Raspberry Pi Pico-series C/C++ SDK
1.2. Anatomy of a SDK Application 9

Ê4
Ê5 # pull in common dependencies
Ê6 target_link_libraries(blink_simple pico_stdlib)
Ê7
Ê8 # create map/bin/hex/uf2 file etc.
Ê9 pico_add_extra_outputs(blink_simple)
10
11 # call pico_set_program_url to set path to example on github, so users can find the source
Ê for an example via picotool
12 example_auto_set_url(blink_simple)
The standard CMake function add_executable in this file declares that a program called blink_simple should be built from
the C file shown earlier. This is also the "target" name in CMake, and is also used when building the program
individually. For example, in the pico-examples repository you can say make blink_simple in your build directory, and that
name comes from this line. You can have multiple executables in a single project, and the pico-examples repository is one
such project.
The target_link_libraries is pulling in the SDK functionality that our program needs. If you don’t ask for a library, it
doesn’t appear in your program binary. Just like pico/stdlib.h is an umbrella header that includes things like pico/time.h
and hardware/gpio.h, pico_stdlib is an umbrella library that makes libraries like pico_time and hardware_gpio available to
your build, so that those headers can be included in the first place, and the extra C source files are compiled and linked.
If you need less common functionality, not included with pico_stdlib, like accessing the DMA hardware, you should add
those dependencies here (e.g. listing hardware_dma before or after pico_stdlib).
We could end the CMake file here, and that would be enough to build the blink_simple program. By default, the build will
produce an ELF file (executable linkable format), containing all of your code and the SDK libraries it uses. You can load
an ELF into the RP-series microcontroller’s RAM or external flash through the Serial Wire Debug port, with a debugger
setup like gdb and openocd, or via picotool. It’s often easier to program your Raspberry Pi Pico 2 or other RP-series
microcontroller board directly over USB with BOOTSEL mode, and this requires a different type of file, called UF2, which
serves the same purpose here as an ELF file, but is constructed to survive the rigours of USB mass storage transfer
more easily. The pico_add_extra_outputs function declares that you want a UF2 file to be created, as well as some useful
extra build output like disassembly and map files.
NOTE
The ELF file is converted to a UF2 using picotool.
The final example_auto_set_url function is used to embed a link back to the example soource code on github into the
output binary such that it can be displayed via picotool info blink_simple.elf. You’ll see this on the pico-examples
applications, but it’s not applicable to your own programs.
Finally, a brief note on the pico_stdlib library. Besides common hardware and high-level libraries like hardware_gpio and
pico_time, it also pulls in system components like pico-runtime, which is needed to set up the hardware and runtime
environment that lets you just implement`main()` and pico_standard_link which configures the linking of your executable
whilst using a simple CMakeLists.txt. These are incredibly low-level components that most users will not need to worry
about. The reason they are mentioned is to point out that they are ultimately implicit dependencies of your program
because of your dependence on pico_stdlib; if you choose not depend on pico_stdlib and then you can pick just the
exact SDK libraries you want explcitly.
Raspberry Pi Pico-series C/C++ SDK
1.2. Anatomy of a SDK Application 10

Chapter 2. SDK architecture
RP-series microcontrollers are powerful chips, and in particular were designed with a disproportionate amount of
system RAM for their point in the microcontroller design space. However it is an embedded environment, so RAM, CPU
cycles and program space are still at a premium. As a result the trade-offs between performance and other factors (e.g.
edge case error handling, runtime vs compile time configuration) are necessarily much more visible to the developer
than they might be on other, higher-level platforms.
The intention within the SDK has been for features to just work out of the box, with sensible defaults, but also to give the
developer as much control and power as possible (if they want it) to fine tune every aspect of the application they are
building and the libraries used.
The next few sections try to highlight some of the design decisions behind the SDK: the how and the why, as much as
the what.
NOTE
Some parts of this overview are quite technical or deal with very low-level parts of the SDK and build system. You
might prefer to skim this section at first and then read it thoroughly at a later time, after writing a few SDK
applications.
2.1. The Build System
The SDK uses CMake to manage the build. CMake is widely supported by IDEs (Integrated Development Environments),
which can use a CMakeLists.txt file to discover source files and generate code autocomplete suggestions. The same
CMakeLists.txt file provides a terse specification of how your application (or your project with many distinct applications)
should be built, which CMake uses to generate a robust build system used by make, ninja or other build tools. The build
system produced is customised for the platform (e.g. Windows, or a Linux distribution) and by any configuration
variables the developer chooses.
Section 2.6 shows how CMake can set configuration defines for a particular program, or based on which RP-series
microcontroller board you are building for, to configure things like default pin mappings and features of SDK libraries.
These defines are listed in Chapter 5, and Board Configuration files are covered in more detail in Chapter 8. Additionally
Chapter 6 describes CMake variables you can use to control the functionality of the build itself.
Apart from being a widely used build system for C/C++ development, CMake is fundamental to the way the SDK is
structured, and how applications are configured and built.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/blink_simple/CMakeLists.txt
Ê1 add_executable(blink_simple
Ê2 blink_simple.c
Ê3 )
Ê4
Ê5 # pull in common dependencies
Ê6 target_link_libraries(blink_simple pico_stdlib)
Ê7
Ê8 # create map/bin/hex/uf2 file etc.
Ê9 pico_add_extra_outputs(blink_simple)
10
11 # call pico_set_program_url to set path to example on github, so users can find the source
Ê for an example via picotool
12 example_auto_set_url(blink_simple)
Looking again at the blink_simple example, we are defining a new executable blink_simple with a single source file
Raspberry Pi Pico-series C/C++ SDK
2.1. The Build System 11

blink_simple.c, with a single dependency pico_stdlib. We also are using a SDK provided function pico_add_extra_outputs to
ask additional files to be produced beyond the executable itself (.uf2, .hex, .bin, .map, .dis).
The SDK builds an executable which is "bare metal", i.e. it includes the entirety of the code needed to run on the device
(other than certain code contained in the bootrom within the RP-series microcontroller).
pico_stdlib is an INTERFACE library and provides all the rest of the code and configuration needed to compile and link the
blink application. You will notice if you watch a build of blink_simple (https://github.com/raspberrypi/pico-examples/
blob/master/blink_simple/blink_simple.c) that in addition to the single blink_simple.c file, the inclusion of pico_stdlib
causes dozens of other source files to be compiled to flesh out the blink_simple application such that it can be run on a
RP-series microcontroller.
2.2. Every Library is an INTERFACE Library
All libraries within the SDK are CMake INTERFACE libraries. (Note this does not include the C/C++ standard libraries
provided by the compiler). Conceptually, a CMake INTERFACE library is a collection of:
•
Source files
•
Include paths
•
Compiler definitions (visible to code as #defines)
•
Compile and link options
•
Dependencies (on other INTERFACE libraries)
The INTERFACE libraries form a tree of dependencies, with each contributing source files, include paths, compiler
definitions and compile/link options to the build. These are collected based on the libraries you have listed in your
CMakeLists.txt file, and the libraries depended on by those libraries, and so on recursively. To build the application, each
source file is compiled with the combined include paths, compiler definitions and options and linked into an executable
according to the provided link options.
When building an executable with the SDK, all of the code for one executable, including the SDK libraries, is (re)compiled
for that executable from source. Building in this way allows your build configuration to specify customised settings for
those libraries (e.g. enabling/disabling assertions, setting the sizes of static buffers), on a per-application basis, at
compile time. This allows for faster and smaller binaries, in addition of course to the ability to remove support for
unwanted features from your executable entirely.
In the example CMakeLists.txt we declare a dependency on the (INTERFACE) library pico_stdlib. This INTERFACE library itself
depends on other INTERFACE libraries (pico_runtime, hardware_gpio, hardware_uart and others). pico_stdlib provides all the
basic functionality needed to get a simple application running and toggling GPIOs and printing to a UART, and the linker
will garbage collect any functions you don’t call, so this doesn’t bloat your binary. We can take a quick peek into the
directory structure of the hardware_gpio library, which our blink_simple example uses to turn the LED on and off:
hardware_gpio
├── CMakeLists.txt
├── gpio.c
└── include
Ê └── hardware
Ê └── gpio.h
Depending on the hardware_gpio INTERFACE library in your application causes gpio.c to be compiled and linked into your
executable, and adds the include directory shown here to your search path, so that a #include "hardware/gpio.h" will pull
in the correct header in your code.
INTERFACE libraries also make it easy to aggregate functionality into readily consumable chunks (such as pico_stdlib),
which don’t directly contribute any code, but depend on a handful of lower-level libraries that do. Like a metapackage,
this lets you pull in a group of libraries related to a particular goal without listing them all by name.
Raspberry Pi Pico-series C/C++ SDK
2.2. Every Library is an INTERFACE Library 12

IMPORTANT
SDK functionality is grouped into separate INTERFACE libraries, and each INTERFACE library contributes the code and
include paths for that library. Therefore, you must declare a dependency on the INTERFACE library you need directly (or
indirectly through another INTERFACE library) for the header files to be found during compilation of your source file (or
for code completion in your IDE).
NOTE
As all libraries within the SDK are INTERFACE libraries, we will simply refer to them as libraries or SDK libraries from
now on.
2.3. SDK Library Structure
The full API listings are given in Chapter 4; this chapter gives an overview of how SDK libraries are organised, and the
relationships between them.
There are a number of layers of libraries within the SDK. This section starts with the highest-level libraries, which can be
used in C or C++ applications, and navigates all the way down to the hardware_regs library, which is a comprehensive set
of hardware definitions suitable for use in Arm assembly as well as C and C++, before concluding with a brief note on
how the TinyUSB stack can be used from within the SDK.
2.3.1. Higher-level Libraries
These libraries (pico_xxx) provide higher-level APIs, concepts and abstractions that are common to most RP-series
microcontroller-based applications. The APIs are listed in High Level APIs. These may be libraries that have cross-
cutting concerns between multiple pieces of hardware (for example the sleep_ functions in pico_time need to concern
themselves both with the RP-series microcontrollers' timer hardware and with how processors enter and exit low power
states), or they may be pure software infrastructure required for your program to run smoothly. This includes libraries
for things like:
•
Alarms, timers and time functions
•
Multi-core support and synchronization primitives
•
Utility functions and data structures
These libraries are generally built upon one or more underlying hardware_ libraries, and often depend on each other.
NOTE
More libraries are added over time. Certain additional libraries that are not fully supported/stable/documented (e.g. -
Audio support (via PIO), DPI/VGA/MIPI Video support (via PIO), file system support, SDIO support via (PIO)) are
included in the Pico Extras GitHub repository.
2.3.2. Runtime Support Libraries
These libraries provide basic application features required for a basic program.
•
Runtime startup and initialization functions, e.g. performing minimal hardware initialisation (e.g. default PLL and
clock configuration), and calling functions with constructor attributes before entering main()
•
Low level interfacing with the C/C++ runtime library
•
Hardaware/bootrom accelerated single and double-precision floating point support.
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 13

•
Compact printf support, and stdio support via UART, USB, semihosting and Segger RTT
•
On RP2040, language level / and % support for fast division using RP2040 hardware dividers
•
Standard runtime linking setup with default linker scripts
NOTE
There is more high-level discussion of the aggregate library pico_runtime in Section 2.7
2.3.3. Hardware Support Libraries
These are individual libraries (hardware_xxx) providing actual APIs for interacting with each piece of physical
hardware/peripheral. They are lightweight and provide only thin abstractions. The APIs are listed in Hardware APIs.
These libraries generally provide functions for configuring or interacting with the peripheral at a functional level, rather
than accessing registers directly, e.g.:
pio_sm_set_wrap(pio, sm, bottom, top);
rather than:
pio->sm[sm].execctrl =
Ê (pio->sm[sm].execctrl & ~(PIO_SM0_EXECCTRL_WRAP_TOP_BITS |
PIO_SM0_EXECCTRL_WRAP_BOTTOM_BITS)) |
Ê (bottom << PIO_SM0_EXECCTRL_WRAP_BOTTOM_LSB) |
Ê (top << PIO_SM0_EXECCTRL_WRAP_TOP_LSB);
The hardware_ libraries are intended to have a very minimal runtime cost. They generally do not require any or much
RAM, and rarely rely on other runtime infrastructure. In general their only dependencies are the hardware_structs and
hardware_regs libraries that contain definitions of memory-mapped register layout on the RP-series microcontroller. As
such they can be used by low-level or other specialized applications that don’t want to use the rest of the SDK libraries
and runtime.
NOTE
void pio_sm_set_wrap(PIO pio, uint sm, uint bottom, uint top) {} is actually implemented as a static inline function
in https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2_common/hardware_pio/include/hardware/pio.h
directly as shown above.
Using static inline functions is common in SDK header files because such methods are often called with
parameters that have fixed known values at compile time. In such cases, the compiler is often able to fold the code
down to a single register write (or in this case a read, AND with a constant value, OR with a constant value, and a
write) with no function call overhead. This tends to produce much smaller and faster binaries.
2.3.3.1. Hardware Claiming
The hardware layer does provide one small abstraction which is the notion of claiming a piece of hardware. This
minimal system allows registration of peripherals or parts of peripherals (e.g. DMA channels) that are in use, and the
ability to atomically claim free ones at runtime. The common use of this system - in addition to allowing for safe
runtime allocation of resources - provides a better runtime experience for catching software misconfigurations or
accidental use of the same piece hardware by multiple independent libraries that would otherwise be very painful to
debug.
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 14

There are individual claiming/unclaiming methods in the respective hardware_ libraries.
2.3.4. Hardware Structs Library
The hardware_structs library provides a set of C structures which represent the memory mapped layout of the RP-series
microcontroller registers in the system address space. This allows you to replace something like the following (which
you’d write in C with the defines from the lower-level hardware_regs)
*(volatile uint32_t *)(PIO0_BASE + PIO_SM1_SHIFTCTRL_OFFSET) |= PIO_SM1_SHIFTCTRL_AUTOPULL_BITS;
with something like this (where pio0 is a pointer to type pio_hw_t at address PIO0_BASE):
pio0->sm[1].shiftctrl |= PIO_SM1_SHIFTCTRL_AUTOPULL_BITS;
The structures and associated pointers to memory mapped register blocks hide the complexity and potential error-
prone-ness of dealing with individual memory locations, pointer casts and volatile access. As a bonus, the structs tend
to produce better code with older compilers, as they encourage the reuse of a base pointer with offset load/stores,
instead of producing a 32 bit literal for every register accessed.
The struct headers are named consistently with both the hardware_ libraries and the hardware_regs register headers. For
example, if you access the hardware_pio library’s functionality through hardware/pio.h, the hardware_structs library (a
dependee of hardware_pio) contains a header you can include as hardware/structs/pio.h if you need to access a register
directly, and this itself will pull in hardware/regs/pio.h for register field definitions. The PIO header is a bit lengthy to
include here. hardware/structs/pll.h is a shorter example to give a feel for what these headers actually contain:
SDK: https://github.com/raspberrypi/pico-sdk/blob/master/src/rp2350/hardware_structs/include/hardware/structs/pll.h Lines 27 - 74
27 typedef struct {
28 _REG_(PLL_CS_OFFSET) // PLL_CS
29 // Control and Status
30 // 0x80000000 [31] LOCK (0) PLL is locked
31 // 0x40000000 [30] LOCK_N (0) PLL is not locked +
32 // 0x00000100 [8] BYPASS (0) Passes the reference clock to the output instead of
Ê the...
33 // 0x0000003f [5:0] REFDIV (0x01) Divides the PLL input reference clock
34 io_rw_32 cs;
35
36 _REG_(PLL_PWR_OFFSET) // PLL_PWR
37 // Controls the PLL power modes
38 // 0x00000020 [5] VCOPD (1) PLL VCO powerdown +
39 // 0x00000008 [3] POSTDIVPD (1) PLL post divider powerdown +
40 // 0x00000004 [2] DSMPD (1) PLL DSM powerdown +
41 // 0x00000001 [0] PD (1) PLL powerdown +
42 io_rw_32 pwr;
43
44 _REG_(PLL_FBDIV_INT_OFFSET) // PLL_FBDIV_INT
45 // Feedback divisor
46 // 0x00000fff [11:0] FBDIV_INT (0x000) see ctrl reg description for constraints
47 io_rw_32 fbdiv_int;
48
49 _REG_(PLL_PRIM_OFFSET) // PLL_PRIM
50 // Controls the PLL post dividers for the primary output
51 // 0x00070000 [18:16] POSTDIV1 (0x7) divide by 1-7
52 // 0x00007000 [14:12] POSTDIV2 (0x7) divide by 1-7
53 io_rw_32 prim;
54
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 15

55 _REG_(PLL_INTR_OFFSET) // PLL_INTR
56 // Raw Interrupts
57 // 0x00000001 [0] LOCK_N_STICKY (0)
58 io_rw_32 intr;
59
60 _REG_(PLL_INTE_OFFSET) // PLL_INTE
61 // Interrupt Enable
62 // 0x00000001 [0] LOCK_N_STICKY (0)
63 io_rw_32 inte;
64
65 _REG_(PLL_INTF_OFFSET) // PLL_INTF
66 // Interrupt Force
67 // 0x00000001 [0] LOCK_N_STICKY (0)
68 io_rw_32 intf;
69
70 _REG_(PLL_INTS_OFFSET) // PLL_INTS
71 // Interrupt status after masking & forcing
72 // 0x00000001 [0] LOCK_N_STICKY (0)
73 io_ro_32 ints;
74 } pll_hw_t;
The structure contains the layout of the hardware registers in a block, and some defines bind that layout to the base
addresses of the instances of that peripheral in the RP-series microcontroller global address map.
Additionally, you can use one of the atomic set, clear, or xor address aliases of a piece of hardware to set, clear or toggle
respectively the specified bits in a hardware register (as opposed to having the CPU perform a read/modify/write); e.g.:
hw_set_alias(pio0)->sm[1].shiftctrl = PIO_SM1_SHIFTCTRL_AUTOPULL_BITS;
Or, equivalently:
hw_set_bits(&pio0->sm[1].shiftctrl, PIO_SM1_SHIFTCTRL_AUTOPULL_BITS);
NOTE
The hardware atomic set/clear/XOR IO aliases are used extensively in the SDK libraries, to avoid certain classes of
data race when two cores, or an IRQ and foreground code, are accessing registers concurrently.
NOTE
On RP-series microcontrollers, the atomic register aliases are a native part of the peripheral, not a CPU function, so
the system DMA can also perform atomic set/clear/XOR operation on registers.
2.3.5. Hardware Registers Library
The hardware_regs library is a complete set of include files for all RP-series microcontroller registers, autogenerated from
the hardware itself. This is all you need if you want to peek or poke a memory-mapped register directly, however, higher-
level libraries provide more user-friendly ways of achieving what you want in C/C++.
For example, here is a snippet from hardware/regs/sio.h:
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 16

// Description : Single-cycle IO block
// Provides core-local and inter-core hardware for the two
// processors, with single-cycle access.
// =============================================================================
#ifndef HARDWARE_REGS_SIO_DEFINED
#define HARDWARE_REGS_SIO_DEFINED
// =============================================================================
// Register : SIO_CPUID
// Description : Processor core identifier
// Value is 0 when read from processor core 0, and 1 when read
// from processor core 1.
#define SIO_CPUID_OFFSET 0x00000000
#define SIO_CPUID_BITS 0xffffffff
#define SIO_CPUID_RESET "-"
#define SIO_CPUID_MSB 31
#define SIO_CPUID_LSB 0
#define SIO_CPUID_ACCESS "RO"
#endif
These header files are fairly heavily commented (the same information as is present in the datasheet register listings, or
the SVD files). They define the offset of every register, and the layout of the fields in those registers, as well as the
access type of the field, e.g. "RO" for read-only.
TIP
The headers in hardware_regs contain only comments and #define statements. This means they can be included from
assembly files (.S, so the C preprocessor can be used), as well as C and C++ files.
2.3.6. TinyUSB Port
In addition to the core SDK libraries, we provide a RP-series microcontroller port of TinyUSB as the standard device and
host USB support library within the SDK, and the SDK contains some build infrastructure for easily pulling this into your
application.
The tinyusb_dev or tinyusb_host libraries within the SDK can be included in your application dependencies in
CMakeLists.txt to add device or host support to your application respectively. Additionally, the tinyusb_board library is
available to provide the additional "board support" code often used by TinyUSB demos. See the README in Pico
Examples for more information and example code for setting up a fully functional application.
IMPORTANT
RP-series microcontroller USB hardware supports both Host and Device modes, but the two can not be used
concurrently. TinyUSB can however also provide support for USB implemented via PIO, which is exposed, if available,
via tinyusb_pico_pio_usb.
2.3.7. FreeRTOS Ports
FreeRTOS ports are available for RP2040 and RP2350 (both under Arm and RISC-V) either on a single core or in dual-
core SMP mode.
The SDK does not directly depend on FreeRTOS, but does provide some libraries (particularly for networking) that are
designed to be used with FreeRTOS. The pico-examples repository contains examples that use FreeRTOS, and when
building you should set FREERTOS_KERNEL_PATH.
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 17

NOTE
As of the time of press the latest FreeRTOS-Kernel change for SDK 2.0.0 and RP2350 have not been merged
upstream; they can be found here instead.
2.3.8. Wi-Fi on Pico W
The IP support within the Pico SDK is provided by lwIP. The lwIP raw API is always supported: the full API, including
blocking sockets, may be used under FreeRTOS.
There are a number of different library building blocks used within the IP and Wi-Fi support`: pico_lwip for lwIP,
pico_cyw43_driver for the Wi-Fi chip driver, pico_async_context for accessing the non-thread-safe API (lwIP) in a consistent
way whether polling, using multiple cores, or running FreeRTOS.
IMPORTANT
By default libcyw43 is licensed for non-commercial use, but users of Raspberry Pi Pico W, Pico WH, or anyone else
who builds their product around RP2040 and CYW43439, benefit from a free commercial-use licence.
These libraries can be composed individually by advanced users, but in most common cases they are rolled into a few
convenience libraries that you can add to your application’s dependencies in CMakeLists.txt:
•
pico_cyw43_arch_lwip_poll - For single-core, traditional polling-style access to lwIP on Pico W.
•
pico_cyw43_arch_threadsafe_background - For single or multicore access to lwIP on Pico W, with lwIP callbacks
handled in a low-priority interrupt, so no polling is required.
•
pico_cyw43_arch_lwip_sys_freertos - For full access to the lwIP APIs (NO_SYS=0) under FreeRTOS.
For fuller details see the pico_cyw43_arch header file. Many examples of using Wi-Fi and lwIP with the Pico SDK may be
found in the pico-examples repository.
2.3.9. Bluetooth on Pico W
The Bluetooth support within the Pico SDK is provided by BTstack. Documentation for BTstack can be found on
BlueKitchen’s website.
IMPORTANT
In addition to the standard BTstack licensing terms, a supplemental licence which covers commercial use of
BTstack with Raspberry Pi Pico W or Raspberry Pi Pico WH is provided.
See the pico-examples repository for Bluetooth examples including the examples from BTstack.
The Bluetooth support within the SDK is composed of multiple libraries:
The pico_btstack_ble library adds the support needed for Bluetooth Low Energy (BLE), and the pico_btstack_classic library
adds the support needed for Bluetooth Classic. You can link to either library individually, or to both libraries enabling the
dual-mode support provided by BTstack.
The pico_btstack_cyw43 library is required for Bluetooth use. It adds support for the Bluetooth hardware on the Pico W,
and integrates the BTstack run loop concept with the SDK’s pico_async_context library allowing for running Bluetooth
either via polling or in the background, along with multicore and/or FreeRTOS support.
The following additional libraries are optional:
•
pico_btstack_sbc_encoder - Adds Bluetooth Sub Band Coding (SBC) encoder support.
•
pico_btstack_sbc_decoder - Adds Bluetooth Sub Band Coding (SBC) decoder support.
Raspberry Pi Pico-series C/C++ SDK
2.3. SDK Library Structure 18

•
pico_btstack_bnep_lwip - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using LwIP.
•
pico_btstack_bnep_lwip_sys_freertos - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using
LwIP with FreeRTOS in NO_SYS=0 mode.
To use BTstack you must add pico_btstack_cyw43 and one or both of pico_btsack_ble and pico_sbtstack_classic to your
application dependencies in your CMakeLists.txt. Additionally, you need to provide a btstack_config.h file in your source
tree and add its location to your include path. For more details, see BlueKitchen’s documentation on how to configure
BTstack and the relevant Bluetooth example code in the pico-examples repository.
The CMake function pico_btstack_make_gatt_header can be used to run the BTstack compile_gatt tool to make a GATT
header file from a BTstack GATT file.
2.4. Directory Structure
We have discussed libraries such as pico_stdlib and hardware_gpio above. Imagine you wanted to add some code using
the RP-series microcontrollers DMA controller to the hello_world example in pico-examples. To do this you need to add a
dependency on another library, hardware_dma, which is not included by default by pico_stdlib (unlike, say, hardware_uart).
You would change your CMakeLists.txt to list both pico_stdlib and hardware_dma as dependencies of the hello_world target
(executable). (Note the line breaks are not required)
target_link_libraries(hello_world
Ê pico_stdlib
Ê hardware_dma
)
In your source code, you would include the DMA hardware library header as such:
#include "hardware/dma.h"
Trying to include this header without listing hardware_dma as a dependency will fail, and this is due to how SDK files are
organised into logical functional units on disk, to make it easier to add functionality in the future.
As an aside, this correspondence of hardware_dma → hardware/dma.h is the convention for all toplevel SDK library headers.
The library is called foo_bar and the associated header is foo/bar.h. Some functions may be provided inline in the
headers, others may be compiled and linked from additional .c files belonging to the library. Both of these require the
relevant hardware_ library to be listed as a dependency, either directly or through some higher-level bundle like
pico_stdlib.
NOTE
Some libraries have additional headers which are located — for the above example — in foo/bar/other.h
You may want to actually find the files in question (although most IDEs will do this for you). The on disk files are actually
split into multiple top-level directories. This is described in the next section.
2.4.1. Locations of Files
Whilst you may be focused on building a binary to run specifically on Raspberry Pi Pico 2, which uses a RP2040, the SDK
is structured in a more general way. This is for two reasons:
1. To support other future chips in the RP2 family
Raspberry Pi Pico-series C/C++ SDK
2.4. Directory Structure 19

2. To support testing of your code off device (this is host mode)
The latter is useful for writing and running unit tests, but also as you develop your software, for example your debugging
code or work-in-progress software might be too big or use too much RAM to fit on the device, and much of the software
complexity may be non-hardware-specific.
The code is thus split into top-level directories as follows:
Table 1. Top-level
directories
Path Description
src/rp2040/
This contains the hardware_regs and hardware_structs libraries mentioned earlier, along
with a handful of other low-level platform libraries, all of which are specific to the
RP2040.
src/rp2350/
This contains the hardware_regs and hardware_structs libraries mentioned earlier, along
with a handful of other low-level platform libraries, all of which are specific to the
RP2350.
src/rp2_common/
This contains the remaining hardware_ library implementations for individual hardware
components, and pico_ libraries or library implementations that are intended specifically
for RP-series microcontroller hardware. Libraries are included here even if they are
RP2040 or RP2350 specific, if they are considered part of the RP-series microcontroller
API proper.
src/common/
This is common code that is not specific to any hardware. This includes utilty code,
headers providing hardware abstractions for functionality which are simulated in host
mode (see below), along with some of the pico_ library implementations which, to the
extent they use hardware, do so only through the hardware_ abstractions.
src/host/
This is a basic set of stub SDK library implementations sufficient to get simple
Raspberry Pi Pico 2 applications running on your computer (Raspberry Pi OS, Linux,
macOS or Windows using Cygwin or Windows Subsystem for Linux) for testing
purposes. This is not intended to be a fully functional platform, however it is possible to
inject additional implementations of libraries to provide more complete functionality.
There is a CMake variable PICO_PLATFORM that controls the environment you are building for:
The value of PICO_PLATFORM determine which sets of library sources are compiled to build your program. When doing a
PICO_PLATFORM=rp2040 build, you get code from common, rp2_common and rp2040; when doing a host build (PICO_PLATFROM=host),
you get code from common and host.
With the advent of RP2350, there are two additional supported PICO_PLATFORM values, rp350_arm_s for secure Arm code on
RP2350, and rp2350_riscv for RISC-V on RP2350. rp2350 can also be used as a shorthand, but is expanded based on the
value of PICO_DEFAULT_RP2350_PLATFORM.
TIP
Individual boards support only one of either RP2040 or RP2350. To avoid having to specify PICO_PLATFORM in addition
to PICO_BOARD (see Section 2.6.1), specifying the latter can now automatically set the former.
Within each top-level directory, the libraries have the following structure (reading foo_bar as something like hardware_uart
or pico_time)
top-level_dir/
top-level_dir/foo_bar/include/foo/bar.h # header file
top-level_dir/foo_bar/CMakeLists.txt # build configuration
top-level_dir/foo_bar/bar.c # source file(s)
As a concrete example, we can list the hardware_uart directory under pico-sdk/rp2_common (you may also recall the
hardware_gpio library we looked at earlier):
Raspberry Pi Pico-series C/C++ SDK
2.4. Directory Structure 20

hardware_uart
├── CMakeLists.txt
├── include
│ÊÊ └── hardware
│ÊÊ └── uart.h
└── uart.c
uart.h contains function declarations and preprocessor defines for the hardware_uart library, as well as some inline
functions that are expected to be particularly amenable to constant folding by the compiler. uart.c contains the
implementations of more complex functions, such as calculating and setting up the divisors for a given UART baud rate.
NOTE
The directory top-level_dir/foo_bar/include is added as an include directory to the INTERFACE library foo_bar, which is
what allows you to include "foo/bar.h" in your application
2.5. Conventions for Library Functions
This section covers some common patterns you will see throughout the SDK libraries, such as conventions for function
names, how errors are reported, and the approach used to efficiently configure hardware with many register fields
without having unreadable numbers of function arguments.
2.5.1. Function Naming Conventions
SDK functions follow a common naming convention for consistency and to avoid name conflicts. Some names are
quite long, but that is deliberate to be as specific as possible about functionality, and of course because the SDK API is
a C API and does not support function overloading.
2.5.1.1. Name prefix
Functions are prefixed by the library/functional area they belong to; e.g. public functions in the hardware_dma library are
prefixed with dma_. Sometime the prefix refers to a sub group of library functionality (e.g. channel_config_ )
2.5.1.2. Verb
A verb typically follows the prefix specifying that action performed by the function. set_ and get_ (or is_ for booleans)
are probably the most common and should always be present; i.e. a hypothetical method would be
oven_get_temperature() and food_add_salt(), rather than oven_temperature() and food_salt().
2.5.1.3. Suffixes
2.5.1.3.1. Blocking/Non-Blocking Functions and Timeouts
Table 2. SDK Suffixes
for (non-)blocking
functions and
timeouts.
Suffix Param Description
(none) The method is non-blocking, i.e. it does not wait on any external
condition that could potentially take a long time.
Raspberry Pi Pico-series C/C++ SDK
2.5. Conventions for Library Functions 21

_blocking
The method is blocking, and may potentially block indefinitely
until some specific condition is met.
_blocking_until absolute_time_t until
The method is blocking until some specific condition is met,
however it will return early with a timeout condition (see Section
2.5.2) if the until time is reached.
_timeout_ms uint32_t timeout_ms
The method is blocking until some specific condition is met,
however it will return early with a timeout condition (see Section
2.5.2) after the specified number of milliseconds
_timeout_us uint64_t timeout_us
The method is blocking until some specific condition is met,
however it will return early with a timeout condition (see Section
2.5.2) after the specified number of microseconds
2.5.2. Return Codes and Error Handling
As mentioned earlier, there is a decision to be made as to whether/which functions return error codes that can be
handled by the caller, and indeed whether the caller is likely to actually do something in response in an embedded
environment. Also note that very often return codes are there to handle parameter checking, e.g. when asked to do
something with the 27th DMA channel (when there are actually only 12).
In many cases checking for obviously invalid (likely program bug) parameters in (often inline) functions is prohibitively
expensive in speed and code size terms, and therefore we need to be able to configure it on/off, which precludes return
codes being returned for these exceptional cases.
The SDK follows two strategies:
1. Methods that can legitimately fail at runtime due to runtime conditions e.g. timeouts, dynamically allocated
resource, can return a status which is either
◦
A bool indicating success or not
◦
An integer value which, if negative, is standard SDK negative integer return code from the PICO_ERROR_ family
(see pico_error_code values in pico_base) and if non-negative indicates a successful return. In the latter case
the value is either PICO_OK (0) or any other positive value if the function actually needs to return something
2. Other issue like invalid parameters, or failure to allocate resources which are deemed program bugs (e.g. two
libraries trying to use the same statically assigned piece of hardware) do not affect a return code (usually the
functions return void) and must cause some sort of exceptional event.
As of right now the exceptional event is a C assert, so these checks are always disabled in release builds by
default. Additionally most of the calls to assert are disabled by default for code/size performance (even in debug
builds); You can set PARAM_ASSERTIONS_ENABLE_ALL=1 or PARAM_ASSERTIONS_DISABLE_ALL=1 in your build to change the
default across the entire SDK, or say PARAM_ASSERTIONS_ENABLED_I2C=0/1 to explicitly specify the behaviour for the
hardware_i2c module
In the future we may support calling a custom function to throw an exception in C++ or other environments where
stack unwinding is possible.
3. Obviously sometimes the calling code whether it be user code or another higher level function, may not want the
called function to assert on bad input, in which case it is the responsibility of the caller to check the validity (there
are a good number of API functions provided that help with this) of their arguments, and the caller can then choose
to provide a more flexible runtime error experience.
4. Finally, some code may choose to "panic" directly if it detects an invalid state. A "panic" involves writing a message
to standard output and then halting (by executing a breakpoint instruction). Panicking is a good response when it
is undesirable to even attempt to continue given the current situation.
Raspberry Pi Pico-series C/C++ SDK
2.5. Conventions for Library Functions 22
2.5.3. Use of Inline Functions
SDK libraries often contain a mixture of static inline functions in header files, and non-static functions in C source files.
In particular, the hardware_ libraries are likely to contain a higher proportion of inline function definitions in their headers.
This is done for speed and code size.
The code space needed to setup parameters for a regular call to a small function in another compilation unit can be
substantially larger than the function implementation. Compilers have their own metrics to decide when to inline
function implementations at their call sites, but the use of static inline definitions gives the compiler more freedom to
do this.
This is particularly effective in the context of hardware register access because these functions often:
•
Have relatively many parameters, which…
•
…are immediately shifted and masked to combine with some register value, and…
•
…are often constants known at compile time
So if the implementation of a hardware access function is inlined, the compiler can propagate the constant parameters
through whatever bit manipulation and arithmetic that function may do, collapsing a complex function down to "please
write this constant value to this constant address". Again, we are not forcing the compiler to do this, but the SDK
consistently tries to give it freedom to do so.
The result is that there is generally no overhead using the lower-level hardware_ functions as compared with using
preprocessor macros with the hardware_regs definitions, and they tend to be much less error-prone.
2.5.4. Builder Pattern for Hardware Configuration APIs
The SDK uses a builder pattern for the more complex configurations, which provides the following benefits:
1. Readability of code (avoid "death by parameters" where a configuration function takes a dozen integers and
booleans)
2. Tiny runtime code (thanks to the compiler)
3. Less brittle (the addition of another item to a hardware configuration will not break existing code)
Take the following hypothetical code example to (quite extensively) configure a DMA channel:
int dma_channel = 3;
dma_channel_config config = dma_get_default_channel_config(dma_channel);
channel_config_set_read_increment(&config, true);
channel_config_set_write_increment(&config, true);
channel_config_set_dreq(&config, DREQ_SPI0_RX);
channel_config_set_transfer_data_size(&config, DMA_SIZE_8);
dma_set_config(dma_channel, &config, false);
The value of dma_channel is known at compile time, so the compiler can replace dma_channel with 3 when generating code
(constant folding). The dma_ methods are static inline methods (from https://github.com/raspberrypi/pico-sdk/blob/
master/src/rp2_common/hardware_dma/include/hardware/dma.h) meaning the implementations can be folded into
your code by the compiler and, consequently, your constant parameters (like DREQ_SPI0_RX) are propagated though this
local copy of the function implementation. The resulting code is usually smaller, and certainly faster, than the register
shuffling caused by setting up a function call.
The net effect is that the compiler actually reduces all of the above to the following code:
Raspberry Pi Pico-series C/C++ SDK
2.5. Conventions for Library Functions 23

Effective code produced by the C compiler for the DMA configuration
*(volatile uint32_t *)(DMA_BASE + DMA_CH3_AL1_CTRL_OFFSET) = 0x00089831;
It may seem counterintuitive that building up the configuration by passing a struct around, and committing the final
result to the IO register, would be so much more compact than a series of direct register modifications using register
field accessors. This is because the compiler is customarily forbidden from eliminating IO accesses (illustrated here
with a volatile keyword), with good reason. Consequently it’s easy to unwittingly generate code that repeatedly puts a
value into a register and pulls it back out again, changing a few bits at a time, when we only care about the final value of
the register. The configuration pattern shown here avoids this common pitfall.
NOTE
The SDK code is designed to make builder patterns efficient in both Release and Debug builds. Additionally, even if
not all values are known constant at compile time, the compiler can still produce the most efficient code possible
based on the values that are known.
2.6. Customisation and Configuration Using Preprocessor
variables
The SDK allows use of compile time definitions to customize the behavior/capabilities of libraries, and to specify
settings (e.g. physical pins) that are unlikely to be changed at runtime This allows for much smaller more efficient code,
and avoids additional runtime overheads and the inclusion of code for configurations you might choose at runtime even
though you actually don’t (e.g. support PWM audio when you are only using I2S)!
Remember that because of the use of INTERFACE libraries, all the libraries your application(s) depend on are built from
source for each application in your build, so you can even build multiple variants of the same application with different
baked in behaviors.
Chapter 5 has more details and a comprehensive list of the available preprocessor defines, what they do, and what their
default values are.
Preprocessor variables may be specified in a number of ways, described in the following sections.
NOTE
Whether compile time configuration or runtime configuration or both is supported/required is dependent on the
particular library itself. The general philosophy however, is to allow sensible default behaviour without the user
specifying any settings (beyond those provided by the board configuration).
2.6.1. Preprocessor Variables via Board Configuration File
Many of the common configuration settings are actually related to the particular RP-series microcontroller board being
used and include default pin settings for various SDK libraries. The board being used is specified via the PICO_BOARD
CMake variable which may be specified on the CMake command line or in the environment.
The board configuration provides a header file that specifies defaults if not otherwise specified; for example
https://github.com/raspberrypi/pico-sdk/blob/master/src/boards/include/boards/pico.h specifies
#ifndef PICO_DEFAULT_LED_PIN
#define PICO_DEFAULT_LED_PIN 25
#endif
Raspberry Pi Pico-series C/C++ SDK
2.6. Customisation and Configuration Using Preprocessor variables 24

The header my_board_name.h is included by all other SDK headers as a result of setting PICO_BOARD=my_board_name. You can
also create your own board headers.
See Section 6.2 for more full details on PICO_BOARD and related CMake variables.
2.6.2. Preprocessor Variables Per Binary or Library via CMake
We could modify the https://github.com/raspberrypi/pico-examples/blob/master/hello_world/CMakeLists.txt with
target_compile_definitions to specify an alternate set of UART pins to use.
Modified hello_world CMakeLists.txt specifying different UART pins
add_executable(hello_world
Ê hello_world.c
)
# SPECIFY two preprocessor definitions for the target hello_world
target_compile_definitions(hello_world PRIVATE
Ê PICO_DEFAULT_UART_TX_PIN=16
Ê PICO_DEFAULT_UART_RX_PIN=17
)
# Pull in our pico_stdlib which aggregates commonly used features
target_link_libraries(hello_world pico_stdlib)
# create map/bin/hex/uf2 file etc.
pico_add_extra_outputs(hello_world)
The target_compile_definitions specifies preprocessor definitions that will be passed to the compiler for every source file
in the target hello_world (which as mentioned before includes all of the sources for all dependent INTERFACE libraries).
PRIVATE is required by CMake to specify the scope for the compile definitions. Note that all preprocessor definitions used
by the SDK have a PICO_ prefix.
2.7. SDK Runtime
For those coming from non-embedded programming, or from other devices, this section will give you an idea of how
various C/C++ language level concepts are handled within the SDK
2.7.1. Standard Input/Output (stdio) Support
The SDK provides infrastructure for routing stdout and stdin to various hardware interfaces, which is provided by the
pico_stdio library.
•
A UART interface specified by a board configuration header. The default for Raspberry Pi Pico 2 is 115200 baud on
GPIO0 (TX) and GPIO1 (RX)
•
A USB CDC ACM virtual serial port, using TinyUSB’s CDC support. The virtual serial device can be accessed
through the RP-series microcontrollers' dedicated USB hardware interface, in Device mode
•
Minimal semihosting support to direct stdout to an external debug host connected via the Serial Wire Debug link on
the RP-series microcontroller
•
Segger RTT
The support is used via the standard calls like printf, puts, getchar, found in the standard <stdio.h> header. By default,
stdout converts bare linefeed characters to carriage return plus linefeed, for better display in a terminal emulator. This
Raspberry Pi Pico-series C/C++ SDK
2.7. SDK Runtime 25
can be disabled at runtime, at build time, or the CR-LF support can be completely removed.
stdout is broadcast to all interfaces that are enabled, and stdin is collected from all interfaces which are enabled and
support input. Since some of the interfaces, particularly USB, have heavy runtime and binary size cost, only the UART
interface is included by default. You can add/remove interfaces for a given program at build time with e.g.
pico_enable_stdio_usb(target_name, 1) # enable USB CDC stdio for TARGET target_name
2.7.2. Printf Support
The SDK runtime packages a lightweight printf library by Marco Paland, provided via the pico_printf library.
This is a small and largely feature complete implementation, however the C library version (or no printf support) can be
chosen instead via the CMake function pico_set_printf_implementation.
2.7.3. Runtime Initialization and Linking
Using the SDK you can simply write your simple C file with a main() method, and a small CMakeLists.txt and you can build
a binary that works on your RP-series microcontroller.
You can take as much control of this process as you want, but by default, the pico_runtime includes these libraries:
•
pico_crt0 - the runtime entry point and default linker scripts which define memory layout
•
pico_standard_link - configuration for link options and pulling in linker scripts
•
pico_runtime_init - a default set of initializers to run before reaching main.
2.7.4. C-Library Integration
There are a variety of C libraries used by the compilers supported by the SDK. These currently include:
•
newlib
•
picolibc
•
llvm-libc
These each have slightly different integration points for a bare-metal embedded applications, and the SDK runtime
takes care of these via the pico_clib_interface library.
2.7.5. Floating-point Support
The SDK provides a highly optimized single and double-precision floating point implementation. often significantly
faster than the equivalent C library versions. Both basic arithmetic, and scientific functions are provided.
On RP2040 the functions are actually implemented using support provided in the RP2040 bootrom. This means the
interface from your code to the ROM floating point library has very minimal impact on your program size, certainly using
dramatically less flash storage than including the standard floating point routines shipped with your compiler. The
physical ROM storage on the RP-series microcontroller has single-cycle access (with a dedicated arbiter on the RP-
series microcontroller busfabric), and accessing code stored here does not put pressure on the flash cache or take up
space in memory, so not only are the routines fast, the rest of your code will run faster due them being resident in ROM.
On RP2350 optimized Arm versions of the single-precision floating point functions are provided which use the
processors VFP floating point instructions. Optimized versions of the double-precision float point functions are
provided using the RP2350’s DCP (Double Coprocessor) instructions.
Raspberry Pi Pico-series C/C++ SDK
2.7. SDK Runtime 26

The SDK libraries pico_float and pico_double provide this support. This includes implementations for all the standard
functions from math.h as well as additional functions that can be found in pico/float.h and pico/double.h.
2.7.5.1. Configuration and Alternate Implementations
There are three different floating point implementations provided
Name Description
default
The default; equivalent to pico
pico
Use the fast/compact SDK/bootrom implementations
compiler
Use the standard compiler provided soft floating point implementations
none
Map all functions to a runtime assertion. You can use this when you know you don’t
want any floating point support to make sure it isn’t accidentally pulled in by some
library.
These settings can be set independently for both "float" and "double":
For "float" you can call pico_set_float_implementation(TARGET NAME) in your CMakeLists.txt to choose a specific
implementation for a particular target, or set the CMake variable PICO_DEFAULT_FLOAT_IMPL to pico_float_NAME to set the
default.
For "double" you can call pico_set_double_implementation(TARGET NAME) in your CMakeLists.txt to choose a specific
implementation for a particular target, or set the CMake variable PICO_DEFAULT_DOUBLE_IMPL to pico_double_NAME to set the
default.
TIP
The pico floating point library adds very little to your binary size, however it must include implementations for any
used functions that are not present in V1 of the bootrom, which is present on early Raspberry Pi Pico 2 boards. If you
know that you are only using RP2040s with V2 of the bootrom, then you can specify defines
PICO_FLOAT_SUPPORT_ROM_V1=0` and PICO_DOUBLE_SUPPORT_ROM_V1=0 so the extra code will not be included. Any use
of those functions on a RP2040 with a V1 bootrom will cause a panic at runtime. See the RP2040 Datasheet for
more specific details of the bootrom functions.
2.7.5.1.1. NaN Propagation
The SDK implementation by default treats input NaNs as infinites. If you require propagation of NaN inputs to outputs
and NaN outputs for domain errors, then you can set the compile definitions PICO_FLOAT_PROPAGATE_NANS and
PICO_DOUBLE_PROPAGATE_NANS to 1, at the cost of a small runtime overhead.
2.7.6. Hardware Divider
This section applies to RP2040 only.
The SDK includes optimized 32- and 64-bit division functions accelerated by the RP2040 hardware divider, which are
seamlessly integrated with the C / and % operators. The SDK also supplies a high-level API which includes combined
quotient and remainder functions for 32- and 64-bit, also accelerated by the hardware divider.
See Figure 1 and Figure 2 for 32-bit and 64-bit integer divider comparison.
Raspberry Pi Pico-series C/C++ SDK
2.7. SDK Runtime 27

1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
0 50
GCC
Pico
100 150 200 250
Figure 1. 32-bit divides
by divider size using
GCC library (blue), or
the SDK library (red)
with the RP2040
hardware divider.
Figure 2. 64-bit divides
by divider size using
GCC library (blue), or
the SDK library (red)
with the RP2040
hardware divider.
2.8. Multi-core support
Multi-core support should be familiar to those used to programming with threads in other environments. The second
core is just treated as a second thread within your application; initially the second core (core1 as it is usually referred to;
the main application thread runs on core0) is halted, however you can start it executing some function in parallel from
your main application thread.
Core 1 (the second core) is started by calling multicore_launch_core1(some_function_pointer); on core 0, which wakes the
core from its low-power sleep state and provides it with its entry point — some function you have provided which
hopefully has a descriptive name like void core1_main() { }. This function, as well as others such as pushing and
popping data through the inter-core mailbox FIFOs, is listed under pico_multicore.
Care should be taken with calling C library functions from both cores simultaneously as they are generally not designed
Raspberry Pi Pico-series C/C++ SDK
2.8. Multi-core support 28

to be thread safe. You can use the mutex_ API provided by the SDK in the pico_sync library (mutex) from within your own
code.
NOTE
That the SDK version of printf is always safe to call from both cores. malloc, calloc and free are additionally wrapped
to make it thread safe when you include the pico_multicore as a convenience for C++ programming, where some
object allocations may not be obvious.
2.9. Using C++
The SDK has a C style API, however the SDK headers may be safely included from C++ code, and the functions called
(they are declared with C linkage).
C++ files are integrated into SDK projects in the same way as C files: listing them in your CMakeLists.txt file under either
the add_executable() entry, or a separate target_sources() entry to append them to your target.
To save space, exception handling is disabled by default; this can be overridden with the CMake environment variable
PICO_CXX_ENABLE_EXCEPTIONS=1. There are a handful of other C++ related PICO_CXX vars listed in Chapter 6.
2.10. Supporting both RP2040 and RP2350
The RP2350 supports both Cortex-M33 (Arm) and Hazard3 (RISC-V) processors. As a result the SDK now supports
these processors as well as the Cortex-M0 plus processors on the RP2040.
The majority of existing source code using the SDK should compile and run unmodified, even under RISC-V, with the
obvious exception of user Arm assembly code, or code interacting with the processor internals.
See Section 6.2 for details of configuring the SDK build for your particular board and RP-series microcontroller platform.
The SDK now supports the compilers listed below, although GCC is still the only officially supported compiler as of this
SDK 2.0.0.
TIP
If you have the correct compiler in your PATH, then compilation should just work based on your PICO_PLATFORM and
PICO_COMPILER value, however for more control you can set your PICO_TOOLCHAIN_PATH. See Section 6.3 for full details, on
configuring and finding toolchains
For Arm:
•
GCC arm-none-eabi (PICO_COMPILER=pico_arm_gcc - the default for Arm)
◦
version 6 onwards for RP2040
◦
version 9 onwards for RP2350 since that is the first version that supports the Arm Cortex-M33
•
LLVM Embedded Toolchain For ARM (PICO_COMPILER=pico_arm_clang)
◦
version 14 onwards
•
Pigweed LLVM. This is the vanilla build of LLVM with llvm-libc used by PigWeed (PICO_COMPILER=pico_arm_clang)
◦
clang_linux-x86_64 (sha256 e12ee0db9226f5b4a4400c5eb2c0f757d7056181b651622b5453acb00105fd87)
◦
clang_win-x86_64 (sha256 8c41e8b507f4dfede80842f98a716cac209f552064088fa1b7f4c64a1e547534)
◦
clang_mac-x86_64 (sha256 1d92f52609d3c1e958fd56f5e9a68ab99b2042ddcc6e90a5eb5009cf7ac4897d)
◦
clang_mac-aarch64 (sha256 53184680db7e0043a8fba1556c7644b8f5e6c8cdffa4436a92a8e8adb0f45b8d)
Raspberry Pi Pico-series C/C++ SDK
2.9. Using C++ 29

For RISC-V:
•
GCC (PICO_COMPILER=pico_arm_gcc - the default for RISC-V)
Only very recent versions of GCC fully support the Hazard 3 RISC-V processors, so we recommend the compilers
listed below:
◦
CORE-V GCC top-of-tree compilers
◦
Building your own version of GCC 14 as an advanced option. For example. on current Ubuntu:
sudo apt-get install autoconf automake autotools-dev curl python3 python3-pip libmpc-
dev libmpfr-dev libgmp-dev gawk build-essential bison flex texinfo gperf libtool
patchutils bc zlib1g-dev libexpat-dev ninja-build git cmake libglib2.0-dev libslirp-dev
sudo mkdir -p /opt/riscv/gcc14-rp2350-no-zcmp
sudo chown -R $(whoami) /opt/riscv/gcc14-rp2350-no-zcmp
git clone https://github.com/riscv/riscv-gnu-toolchain
cd riscv-gnu-toolchain
git clone https://github.com/gcc-mirror/gcc gcc-14 -b releases/gcc-14
./configure --prefix=/opt/riscv/gcc14-rp2350-no-zcmp --with
-arch=rv32ima_zicsr_zifencei_zba_zbb_zbs_zbkb_zca_zcb --with-abi=ilp32 --with-multilib
-generator="rv32ima_zicsr_zifencei_zba_zbb_zbs_zbkb_zca_zcb-ilp32--
;rv32imac_zicsr_zifencei_zba_zbb_zbs_zbkb-ilp32--" --with-gcc-src=`pwd`/gcc-14
make -j$(nproc)
2.11. Next Steps
This has been quite a deep dive. If you’ve somehow made it through this chapter without building any software, now
would be a perfect time to divert to the Getting started with Raspberry Pi Pico-series book, which has detailed
instructions on connecting to your RP-series microcontroller board and loading an application built with the SDK.
Chapter 3 gives some background on RP-series microcontrollers' unique Programmable I/O subsystem, and walks
through building some applications which use PIO to talk to external hardware.
Chapter 4 is a comprehensive listing of the SDK APIs. The APIs are listed according to groups of related functionality
(e.g. low-level hardware access).
Raspberry Pi Pico-series C/C++ SDK
2.11. Next Steps 30

Chapter 3. Using programmable I/O
(PIO)
3.1. What is Programmable I/O (PIO)?
Programmable I/O (PIO) is a new piece of hardware developed for RP-series microcontrollers. It allows you to create
new types of (or additional) hardware interfaces on your RP-series microcontroller based device. If you’ve looked at
fixed peripherals on a microcontroller, and thought "I want to add 4 more UARTs", or "I’d like to output DPI video", or
even "I need to communicate with this cursed serial device I found on AliExpress, but no machine has hardware
support", then you will have fun with this chapter.
PIO hardware is described extensively in chapter 11 of the RP2350 Datasheet. This is a companion to that text,
focussing on how, when and why to use PIO in your software. To start, we’re going to spend a while discussing why I/O
is hard, what the current options are, and what PIO does differently, before diving into some software tutorials. We will
also try to illuminate some of the more important parts of the hardware along the way, but will defer to the datasheet for
full explanations.
TIP
You can skip to the first software tutorial if you’d prefer to dive straight in.
3.1.1. Background
Interfacing with other digital hardware components is hard. It often happens at very high frequencies (due to amounts
of data that need to be transferred), and has very exact timing requirements.
3.1.2. I/O Using dedicated hardware on your PC
Traditionally, on your desktop or laptop computer, you have one option for hardware interfacing. Your computer has
high speed USB ports, HDMI outputs, PCIe slots, SATA drive controllers etc. to take care of the tricky and time sensitive
business of sending and receiving ones and zeros, and responding with minimal latency or interruption to the graphics
card, hard drive etc. on the other end of the hardware interface.
The custom hardware components take care of specific tasks that the more general multi-tasking CPU is not designed
for. The operating system drivers perform higher level management of what the hardware components do, and
coordinate data transfers via DMA to/from memory from the controller and receive IRQs when high level tasks need
attention. These interfaces are purpose-built, and if you have them, you should use them.
3.1.3. I/O Using dedicated hardware on your Raspberry Pi or microcontroller
Not so common on PCs: your Raspberry Pi or microcontroller is likely to have dedicated hardware on chip for managing
UART, I2C, SPI, PWM, I2S, CAN bus and more over general purpose I/O pins (GPIOs). Like USB controllers (also found on
some microcontrollers, including the RP2350 on Raspberry Pi Pico 2), I2C and SPI are general purpose buses which
connect to a wide variety of external hardware, using the same piece of on-chip hardware. This includes sensors,
external flash, EEPROM and SRAM memories, GPIO expanders, and more, all of them widely and cheaply available. Even
HDMI uses I2C to communicate video timings between Source and Sink, and there is probably a microcontroller
embedded in your TV to handle this.
Raspberry Pi Pico-series C/C++ SDK
3.1. What is Programmable I/O (PIO)? 31

These protocols are simpler to integrate into very low-cost devices (i.e. not the host), due to their relative simplicity and
modest speed. This is important for chips with mostly analogue or high-power circuitry: the silicon fabrication
techniques used for these chips do not lend themselves to high speed or gate count, so if your switchmode power
supply controller has some serial configuration interface, it is likely to be something like I2C. The number of traces
routed on the circuit board, the number of pins required on the device package, and the PCB technology required to
maintain signal integrity are also factors in the choice of these protocols. A microcontroller needs to communicate with
these devices to be part of a larger embedded system.
This is all very well, but the area taken up by these individual serial peripherals, and the associated cost, often leaves
you with a limited menu. You may end up paying for a bunch of stuff you don’t need, and find yourself without enough of
what you really want. Of course you are out of luck if your microcontroller does not have dedicated hardware for the
type of hardware device you want to attach (although in some cases you may be able to bridge over USB, I2C or SPI at
the cost of buying external hardware).
3.1.4. I/O Using software control of GPIOs ("bit-banging")
The third option on your Raspberry Pi or microcontroller — any system with GPIOs which the processor(s) can access
easily — is to use the CPU to wiggle (and listen to) the GPIOs at dizzyingly high speeds, and hope to do so with
sufficiently correct timing that the external hardware still understands the signals.
As a bit of background it is worth thinking about types of hardware that you might want to interface, and the
approximate signalling speeds involved:
Table 3. Types of
hardware
Interface Speed Interface
1-10Hz Push buttons, indicator LEDs
300Hz HDMI CEC
10-100kHz Temperature sensors (DHT11), one-wire serial
<100kHz I2C Standard mode
22-100+kHz PCM audio
300+kHz PWM audio
400-1200kHz WS2812 LED string
10-3000kHz UART serial
12MHz USB Full Speed
1-100MHz SPI
20-300MHz DPI/VGA video
480MHz USB High Speed
10-4000MHz Ethernet LAN
12-4000MHz SD card
250-20000MHz HDMI/DVI video
"Bit-Banging" (i.e. using the processor to hammer out the protocol via the GPIOs) is very hard. The processor isn’t really
designed for this. It has other work to do… for slower protocols you might be able to use an IRQ to wake up the
processor from what it was doing fast enough (though latency here is a concern) to send the next bit(s). Indeed back in
the early days of PC sound it was not uncommon to set a hardware timer interrupt at 11kHz and write out one 8-bit PCM
sample every interrupt for some rather primitive sounding audio!
Doing that on a PC nowadays is laughed at, even though they are many order of magnitudes faster than they were back
then. As processors have become faster in terms of overwhelming number-crunching brute force, the layers of software
and hardware between the processor and the outside world have also grown in number and size. In response to the
Raspberry Pi Pico-series C/C++ SDK
3.1. What is Programmable I/O (PIO)? 32

growing distance between processors and memory, PC-class processors keep many hundreds of instructions in-flight
on a single core at once, which has drawbacks when trying to switch rapidly between hard real time tasks. However,
IRQ-based bitbanging can be an effective strategy on simpler embedded systems.
Above certain speeds — say a factor of 1000 below the processor clock speed — IRQs become impractical, in part due to
the timing uncertainty of actually entering an interrupt handler. The alternative when "bit-banging" is to sit the processor
in a carefully timed loop, often painstakingly written in assembly, trying to make sure the GPIO reading and writing
happens on the exact cycle required. This is really really hard work if indeed possible at all. Many heroic hours and likely
thousands of GitHub repositories are dedicated to the task of doing such things (a large proportion of them for LED
strings).
Additionally of course, your processor is now busy doing the "bit-banging", and cannot be used for other tasks. If your
processor is interrupted even for a few microseconds to attend to one of the hard peripherals it is also responsible for,
this can be fatal to the timing of any bit-banged protocol. The greater the ratio between protocol speed and processor
speed, the more cycles your processor will spend uselessly idling in between GPIO accesses. Whilst it is eminently
possible to drive a 115200 baud UART output using only software, this has a cost of >10,000 cycles per byte if the
processor is running at 133MHz, which may be poor investment of those cycles.
Whilst dealing with something like an LED string is possible using "bit-banging", once your hardware protocol gets faster
to the point that it is of similar order of magnitude to your system clock speed, there is really not much you can hope to
do. The main case where software GPIO access is the best choice is LEDs and push buttons.
Therefore you’re back to custom hardware for the protocols you know up front you are going to want (or more
accurately, the chip designer thinks you might need).
3.1.5. Programmable I/O Hardware using FPGAs and CPLDs
A field-programmable gate array (FPGA), or its smaller cousin, the complex programmable logic device (CPLD), is in
many ways the perfect solution for tailor-made I/O requirements, whether that entails an unusual type or unusual
mixture of interfaces. FPGAs are chips with a configurable logic fabric — effectively a sea of gates and flipflops, some
other special digital function blocks, and a routing fabric to connect them — which offer the same level of design
flexibility available to chip designers. This brings with it all the advantages of dedicated I/O hardware:
•
Absolute precision of protocol timing (within limitations of your clock source)
•
Capable of very high I/O throughput
•
Offload simple, repetitive calculations that are part of the I/O standard (checksums)
•
Present a simpler interface to host software; abstract away details of the protocol, and handle these details
internally.
The main drawback of FPGAs in embedded systems is their cost. They also present a very unfamiliar programming
model to those well-versed in embedded software: you are not programming at all, but rather designing digital
hardware. One you have your FPGA you will still need some other processing element in your system to run control
software, unless you are using an FPGA expensive enough to either fit a soft CPU core, or contain a hardened CPU core
alongside the FPGA fabric.
eFPGAs (embedded FPGAs) are available in some microcontrollers: a slice of FPGA logic fabric integrated into a more
conventional microcontroller, usually with access to some GPIOs, and accessible over the system bus. These are
attractive from a system integration point of view, but have a significant area overhead compared with the usual serial
peripherals found on a microcontroller, so either increase the cost and power dissipation, or are very limited in size. The
issue of programming complexity still remains in eFPGA-equipped systems.
3.1.6. Programmable I/O Hardware using PIO
The PIO subsystem on RP-series microcontrollers allows you to write small, simple programs for what are called PIO
state machines, of which RP2040 has eight split across two PIO instances, and RP2350 has twelve split across three
PIO instances. A state machine is responsible for setting and reading one or more GPIOs, buffering data to or from the
Raspberry Pi Pico-series C/C++ SDK
3.1. What is Programmable I/O (PIO)? 33

processor (or the RP-series microcontrollers' ultra-fast DMA subsystem), and notifying the processor, via IRQ or polling,
when data or attention is needed.
These programs operate with cycle accuracy at up to system clock speed (or the program clocks can be divided down
to run at slower speeds for less frisky protocols).
PIO state machines are much more compact than the general-purpose processors on RP2040 and RP2350. In fact, they
are similar in size (and therefore cost) to a standard SPI peripheral, such as the PL022 SPI also found on RP-series
microcontrollers, because much of their area is spent on components which are common to all serial peripherals, like
FIFOs, shift registers and clock dividers. The instruction set is small and regular, so not much silicon is spent on
decoding the instructions. There is no need to feel guilty about dedicating a state machine solely to a single I/O task,
since you have several!
In spite of this, a PIO state machine gets a lot more done in one cycle than a Cortex-M0+ when it comes to I/O: for
example, sampling a GPIO value, toggling a clock signal and pushing to a FIFO all in one cycle, every cycle. The trade-off
is that a PIO state machine is not remotely capable of running general purpose software. As we shall see though,
programming a PIO state machine is quite familiar for anyone who has written assembly code before, and the small
instruction set should be fairly quick to pick up for those who haven’t.
For simple hardware protocols - such as PWM or duplex SPI - a single PIO state machine can handle the task of
implementing the hardware interface all on its own. For more involved protocols such as SDIO or DPI video you may end
up using two or three.
TIP
If you are ever tempted to "bit-bang" a protocol on a RP-series microcontroller, don’t! Use the PIO instead. Frankly
this is true for anything that repeatedly reads or writes from GPIOs, but certainly anything which aims to transfer
data.
3.2. Getting started with PIO
It is possible to write PIO programs both within the C++ SDK and directly from MicroPython.
Additionally the future intent is to add APIs to trivially have new UARTs, PWM channels etc created for you, using a
menu of pre-written PIO programs, but for now you’ll have to follow along with example code and do that yourself.
3.2.1. A First PIO Application
Before getting into all of the fine details of the PIO assembly language, we should take the time to look at a small but
complete application which:
1. Loads a program into a PIO’s instruction memory
2. Sets up a PIO state machine to run the program
3. Interacts with the state machine once it is running.
The main ingredients in this recipe are:
•
A PIO program
•
Some software, written in C, to run the whole show
•
A CMake file describing how these two are combined into a program image to load onto a RP-series
microcontroller based development board
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 34

TIP
The code listings in this section are all part of a complete application on GitHub, which you can build and run. Just
click the link above each listing to go to the source. In this section we are looking at the pio/hello_pio example in
pico-examples. You might choose to build this application and run it, to see what it does, before reading through this
section.
NOTE
The focus here is on the main moving parts required to use a PIO program, not so much on the PIO program itself.
This is a lot to take in, so we will stay high-level in this example, and dig in deeper on the next one.
3.2.1.1. PIO Program
This is our first PIO program listing. It’s written in PIO assembly language.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/hello_pio/hello.pio Lines 8 - 16
Ê8 .program hello
Ê9
10 ; Repeatedly get one word of data from the TX FIFO, stalling when the FIFO is
11 ; empty. Write the least significant bit to the OUT pin group.
12
13 loop:
14 pull
15 out pins, 1
16 jmp loop
The pull instruction takes one data item from the transmit FIFO buffer, and places it in the output shift register (OSR).
Data moves from the FIFO to the OSR one word (32 bits) at a time. The OSR is able to shift this data out, one or more
bits at a time, to further destinations, using an out instruction.
FIFOs?
FIFOs are data queues, implemented in hardware. Each state machine has two FIFOs, between the state
machine and the system bus, for data travelling out of (TX) and into (RX) the chip. Their name (first in,
first out) comes from the fact that data appears at the FIFO’s output in the same order as it was
presented to the FIFO’s input.
The out instruction here takes one bit from the data we just pull-ed from the FIFO, and writes that data to some pins. We
will see later how to decide which pins these are.
The jmp instruction jumps back to the loop: label, so that the program repeats indefinitely. So, to sum up the function of
this program: repeatedly take one data item from a FIFO, take one bit from this data item, and write it to a pin.
Our .pio file also contains a helper function to set up a PIO state machine for correct execution of this program:
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/hello_pio/hello.pio Lines 19 - 34
19 static inline void hello_program_init(PIO pio, uint sm, uint offset, uint pin) {
20 pio_sm_config c = hello_program_get_default_config(offset);
21
22 // Map the state machine's OUT pin group to one pin, namely the `pin`
23 // parameter to this function.
24 sm_config_set_out_pins(&c, pin, 1);
25 // Set this pin's GPIO function (connect PIO to the pad)
26 pio_gpio_init(pio, pin);
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 35

27 // Set the pin direction to output at the PIO
28 pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
29
30 // Load our configuration, and jump to the start of the program
31 pio_sm_init(pio, sm, offset, &c);
32 // Set the state machine running
33 pio_sm_set_enabled(pio, sm, true);
34 }
Here the main thing to set up is the GPIO we intend to output our data to. There are three things to consider here:
1. The state machine needs to be told which GPIO or GPIOs to output to. There are four different pin groups which
are used by different instructions in different situations; here we are using the out pin group, because we are just
using an out instruction.
2. The GPIO also needs to be told that PIO is in control of it (GPIO function select)
3. If we are using the pin for output only, we need to make sure that PIO is driving the output enable line high. PIO can
drive this line up and down programmatically using e.g. an out pindirs instruction, but here we are setting it up
before starting the program.
3.2.1.2. C Program
PIO won’t do anything until it’s been configured properly, so we need some software to do that. The PIO file we just
looked at — hello.pio — is converted automatically (we will see later how) into a header containing our assembled PIO
program binary, any helper functions we included in the file, and some useful information about the program. We
include this as hello.pio.h.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/hello_pio/hello.c
Ê1 /**
Ê2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Ê7 #include <stdio.h>
Ê8
Ê9 #include "pico/stdlib.h"
10 #include "hardware/pio.h"
11 // Our assembled program:
12 #include "hello.pio.h"
13
14 // This example uses the default led pin
15 // You can change this by defining HELLO_PIO_LED_PIN to use a different gpio
16 #define HELLO_PIO_LED_PIN PICO_DEFAULT_LED_PIN
17
18 int main() {
19 #ifndef HELLO_PIO_LED_PIN
20 #warning pio/hello_pio example requires a board with a regular LED
21 #else
22 PIO pio;
23 uint sm;
24 uint offset;
25
26 setup_default_uart();
27
28 // This will find a free pio and state machine for our program and load it for us
29 // We use pio_claim_free_sm_and_add_program_for_gpio_range so we can address gpios >= 32 if
Ê needed and supported by the hardware
30 bool success = pio_claim_free_sm_and_add_program_for_gpio_range(&hello_program, &pio, &
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 36

Ê sm, &offset, HELLO_PIO_LED_PIN, 1, true);
31 hard_assert(success);
32
33 // Configure it to run our program, and start it, using the
34 // helper function we included in our .pio file.
35 printf("Using gpio %d\n", HELLO_PIO_LED_PIN);
36 hello_program_init(pio, sm, offset, HELLO_PIO_LED_PIN);
37
38 // The state machine is now running. Any value we push to its TX FIFO will
39 // appear on the LED pin.
40 // press a key to exit
41 while (getchar_timeout_us(0) == PICO_ERROR_TIMEOUT) {
42 // Blink
43 pio_sm_put_blocking(pio, sm, 1);
44 sleep_ms(500);
45 // Blonk
46 pio_sm_put_blocking(pio, sm, 0);
47 sleep_ms(500);
48 }
49
50 // This will free resources and unload our program
51 pio_remove_program_and_unclaim_sm(&hello_program, pio, sm, offset);
52 #endif
53 }
You might recall that RP2040 has two PIO blocks, each of them with four state machines (the {chipname_rp2350 has
three PIO blocks each with four state machines). Each PIO block has a 32-slot instruction memory which is visible to the
four state machines in the block. We need to load our program into this instruction memory before any of our state
machines can run the program. The function pio_add_program() finds free space for our program in a given PIO’s
instruction memory, and loads it.
32 Instructions?
This may not sound like a lot, but the PIO instruction set can be very dense once you fully explore its
features. A perfectly serviceable UART transmit program can be implemented in four instructions, as
shown in the pio/uart_tx example in pico-examples. There are also a couple of ways for a state machine
to execute instructions from other sources — like directly from the FIFOs — which you can read all about
in the RP2350 Datasheet.
Once the program is loaded, we find a free state machine and tell it to run our program. There is nothing stopping us
from ordering multiple state machines to run the same program. Likewise, we could instruct each state machine to run
a different program, provided they all fit into the instruction memory at once.
We’re configuring this state machine to output its data to the LED on your Raspberry Pi Pico 2 board. If you have already
built and run the program, you probably noticed this already!
At this point, the state machine is running autonomously. The state machine will immediately stall, because it is waiting
for data in the TX FIFO, and we haven’t provided any. The processor can push data directly into the state machine’s TX
FIFO using the pio_sm_put_blocking() function. (_blocking because this function stalls the processor when the TX FIFO is
full.) Writing a 1 will turn the LED on, and writing a 0 will turn the LED off.
3.2.1.3. CMake File
We have two lovely text files sat on our computer, with names ending with .pio and .c, but they aren’t doing us much
good there. A CMake file describes how these are built into a binary suitable for loading onto your Raspberry Pi Pico 2 or
other RP-series microcontroller based board.
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 37

Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/hello_pio/CMakeLists.txt
Ê1 add_executable(hello_pio)
Ê2
Ê3 pico_generate_pio_header(hello_pio ${CMAKE_CURRENT_LIST_DIR}/hello.pio)
Ê4
Ê5 target_sources(hello_pio PRIVATE hello.c)
Ê6
Ê7 target_link_libraries(hello_pio PRIVATE
Ê8 pico_stdlib
Ê9 hardware_pio
10 )
11
12 # Pass cmake -DHELLO_PIO_LED_PIN=x, where x is the pin you want to use
13 if(HELLO_PIO_LED_PIN)
14 target_compile_definitions(hello_pio PRIVATE
15 HELLO_PIO_LED_PIN=${HELLO_PIO_LED_PIN}
16 )
17 endif()
18
19 pico_add_extra_outputs(hello_pio)
20
21 # add url via pico_set_program_url
22 example_auto_set_url(hello_pio)
•
add_executable(): Declare that we are building a program called hello_pio
•
pico_generate_pio_header(): Declare that we have a PIO program, hello.pio, which we want to be built into a C header
for use with our program
•
target_sources(): List the source code files for our hello_pio program. In this case, just one C file.
•
target_link_libraries(): Make sure that our program is built with the PIO hardware API, so we can call functions like
pio_add_program() in our C file.
•
pico_add_extra_outputs(): By default we just get an .elf file as the build output of our app. Here we declare we also
want extra build formats, like a .uf2 file which can be dragged and dropped directly onto a Raspberry Pi Pico 2
attached over USB.
Assuming you already have pico-examples and the SDK installed on your machine, you can run
$ mkdir build
$ cd build
$ cmake ..
$ make hello_pio
To build this program.
3.2.2. A Real Example: WS2812 LEDs
The WS2812 LED (sometimes sold as NeoPixel) is an addressable RGB LED. In other words, it’s an LED where the red,
green and blue components of the light can be individually controlled, and it can be connected in such a way that many
WS2812 LEDs can be controlled individually, with only a single control input. Each LED has a pair of power supply
terminals, a serial data input, and a serial data output.
When serial data is presented at the LED’s input, it takes the first three bytes for itself (red, green, blue) and the
remainder is passed along to its serial data output. Often these LEDs are connected in a single long chain, each LED
connected to a common power supply, and each LED’s data output connected through to the next LED’s input. A long
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 38

burst of serial data to the first in the chain (the one with its data input unconnected) will deposit three bytes of RGB data
in each LED, so their colour and brightness can be individually programmed.
Symbol
Output
1 0 0 1 Latch
Figure 3. WS2812 line
format. Wide positive
pulse for 1, narrow
positive pulse for 0,
very long negative
pulse for latch enable
Unfortunately the LEDs receive and retransmit serial data in quite an unusual format. Each bit is transferred as a
positive pulse, and the width of the pulse determines whether it is a 1 or a 0 bit. There is a family of WS2812-like LEDs
available, which often have slightly different timings, and demand precision. It is possible to bit-bang this protocol, or to
write canned bit patterns into some generic serial peripheral like SPI or I2S to get firmer guarantees on the timing, but
there is still some software complexity and cost associated with generating the bit patterns.
Ideally we would like to have all of our CPU cycles available to generate colour patterns to put on the lights, or to handle
any other responsibilities the processor may have in the embedded system the LEDs are connected to.
TIP
Once more, this section is going to discuss a real, complete program, that you can build and run on your Raspberry
Pi Pico 2. Follow the links above the program listings if you’d prefer to build the program yourself and run it, before
going through it in detail. This section explores the pio/ws2812 example in pico-examples.
3.2.2.1. PIO Program
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.pio Lines 8 - 31
Ê8 .program ws2812
Ê9 .side_set 1
10
11 ; The following constants are selected for broad compatibility with WS2812,
12 ; WS2812B, and SK6812 LEDs. Other constants may support higher bandwidths for
13 ; specific LEDs, such as (7,10,8) for WS2812B LEDs.
14
15 .define public T1 3
16 .define public T2 3
17 .define public T3 4
18
19 .lang_opt python sideset_init = pico.PIO.OUT_HIGH
20 .lang_opt python out_init = pico.PIO.OUT_HIGH
21 .lang_opt python out_shiftdir = 1
22
23 .wrap_target
24 bitloop:
25 out x, 1 side 0 [T3 - 1] ; Side-set still takes place when instruction stalls
26 jmp !x do_zero side 1 [T1 - 1] ; Branch on the bit we shifted out. Positive pulse
27 do_one:
28 jmp bitloop side 1 [T2 - 1] ; Continue driving high, for a long pulse
29 do_zero:
30 nop side 0 [T2 - 1] ; Or drive low, for a short pulse
31 .wrap
The previous example was a bit of a whistle-stop tour of the anatomy of a PIO-based application. This time we will
dissect the code line-by-line. The first line tells the assembler that we are defining a program named ws2812:
.program ws2812
We can have multiple programs in one .pio file (and you will see this if you click the GitHub link above the main program
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 39

listing), and each of these will have its own .program directive with a different name. The assembler will go through each
program in turn, and all the assembled programs will appear in the output file.
Each PIO instruction is 16 bits in size. Generally, 5 of those bits in each instruction are used for the “delay” which is
usually 0 to 31 cycles (after the instruction completes and before moving to the next instruction). If you have read the
PIO chapter of the RP2350 Datasheet, you may have already know that these 5 bits can be used for a different purpose:
.side_set 1
This directive .side_set 1 says we’re stealing one of those delay bits to use for "side-set". The state machine will use this
bit to drive the values of some pins, once per instruction, in addition to what the instructions are themselves doing. This
is very useful for high frequency use cases (e.g. pixel clocks for DPI panels), but also for shrinking program size, to fit
into the shared instruction memory.
Note that stealing one bit has left our delay range from 0-15 (4 bits), but that is quite natural because you rarely want to
mix side-set with lower frequency stuff. Because we didn’t say .side_set 1 opt, which would mean the side-set is
optional (at the cost of another bit to say whether the instruction does a side-set), we have to specify a side-set value for
every instruction in the program. This is the side N you will see on each instruction in the listing.
.define public T1 2
.define public T2 5
.define public T3 3
.define lets you declare constants. The public keyword means that the assembler will also write out the value of the
define in the output file for use by other software: in the context of the SDK, this is a #define. We are going to use T1, T2
and T3 in calculating the delay cycles on each instruction.
.lang_opt python
This is used to specify some PIO hardware defaults as used by the MicroPython PIO library. We don’t need to worry
about them in the context of SDK applications.
.wrap_target
We’ll ignore this for now, and come back to it later, when we meet its friend .wrap.
bitloop:
This is a label. A label tells the assembler that this point in your code is interesting to you, and you want to refer to it
later by name. Labels are mainly used with jmp instructions.
Ê out x, 1 side 0 [T3 - 1] ; Side-set still takes place when instruction stalls
Finally we reach a line with a PIO instruction. There is a lot to see here.
•
This is an out instruction. out takes some bits from the output shift register (OSR), and writes them somewhere
else. In this case, the OSR will contain pixel data destined for our LEDs.
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 40

•
[T3 - 1] is the number of delay cycles (T3 minus 1). T3 is a constant we defined earlier.
•
x (one of two scratch registers; the other imaginatively called y) is the destination of the write data. State machines
use their scratch registers to hold and compare temporary data.
•
side 0: Drive low (0) the pin configured for side-set.
•
Everything after the ; character is a comment. Comments are ignored by the assembler: they are just notes for
humans to read.
Output Shift Register
The OSR is a staging area for data entering the state machine through the TX FIFO. Data is pulled from
the TX FIFO into the OSR one 32-bit chunk at a time. When an out instruction is executed, the OSR can
break this data into smaller pieces by shifting to the left or right, and sending the bits that drop off the
end to one of a handful of different destinations, such as the pins.
The amount of data to be shifted is encoded by the out instruction, and the direction of the shift (left or
right) is configured ahead of time. For full details and diagrams, see the RP2350 Datasheet.
So, the state machine will do the following operations when it executes this instruction:
1. Set 0 on the side-set pin (this happens even if the instruction stalls because no data is available in the OSR)
2. Shift one bit out of the OSR into the x register. The value of the x register will be either 0 or 1.
3. Wait T3 - 1 cycles after the instruction (I.e. the whole thing takes T3 cycles since the instruction itself took a cycle).
Note that when we say cycle, we mean state machine execution cycles: a state machine can be made to execute at
a slower rate than the system clock, by configuring its clock divider.
Let’s look at the next instruction in the program.
Ê jmp !x do_zero side 1 [T1 - 1] ; Branch on the bit we shifted out. Positive pulse
1. side 1 on the side-set pin (this is the leading edge of our pulse)
2. If x == 0 then go to the instruction labelled do_zero, otherwise continue on sequentially to the next instruction
3. We delay T1 - 1 after the instruction (whether the branch is taken or not)
Let’s look at what our output pin has done so far in the program.
Figure 4. The state
machine drives the
line low for time T1 as
it shifts out one data
bit from the OSR, and
then high for time T2
whilst branching on
the value of the bit.
The pin has been low for time T3, and high for time T1. If the x register is 1 (remember this contains our 1 bit of pixel
data) then we will fall through to the instruction labelled do_one:
do_one:
Ê jmp bitloop side 1 [T2 - 1] ; Continue driving high, for a long pulse
On this side of the branch we do the following:
1. side 1 on the side-set pin (continue the pulse)
2. jmp unconditionally back to bitloop (the label we defined earlier, at the top of the program); the state machine is
done with this data bit, and will get another from its OSR
3. Delay for T2 - 1 cycles after the instruction
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 41

The waveform at our output pin now looks like this:
Figure 5. On a one
data bit, the line is
driven low for time T3,
high for time T1, then
high for an additional
time T2
This accounts for the case where we shifted a 1 data bit into the x register. For a 0 bit, we will have jumped over the last
instruction we looked at, to the instruction labelled do_zero:
do_zero:
Ê nop side 0 [T2 - 1] ; Or drive low, for a short pulse
1. side 0 on the side-set pin (the trailing edge of our pulse)
2. nop means no operation. We don’t have anything else we particularly want to do, so waste a cycle
3. The instruction takes T2 cycles in total
For the x == 0 case, we get this on our output pin:
Figure 6. On a zero
data bit, the line is
driven low for time T3,
high for time T1, then
low again for time T1
The final line of our program is this:
.wrap
This matches with the .wrap_target directive at the top of the program. Wrapping is a hardware feature of the state
machine which behaves like a wormhole: you go in through the .wrap statement and appear at the .wrap_target zero
cycles later, unless the .wrap is preceded immediately by a jmp whose condition is true. This is important for getting
precise timing with programs that must run quickly, and often also saves you a slot in the instruction memory.
TIP
Often an explicit .wrap_target/.wrap pair is not necessary, because the default configuration produced by pioasm has
an implicit wrap from the end of the program back to the beginning, if you didn’t specify one.
NOPs
NOP, or no operation, means precisely that: do nothing! You may notice there is no nop instruction
defined in the instruction set reference: nop is really a synonym for mov y, y in PIO assembly.
Why did we insert a nop in this example when we could have jmp-ed? Good question! It’s a dramatic
device we contrived so we could discuss nop and .wrap. Writing documentation is hard. In general,
though, nop is useful when you need to perform a side-set and have nothing else to do, or you need a
very slightly longer delay than is available on a single instruction.
It is hopefully becoming clear why our timings T1, T2, T3 are numbered this way, because what the LED string sees
really is one of these two cases:
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 42

Figure 7. The line is
initially low in the idle
(latch) state, and the
LED is waiting for the
first rising edge. It
sees our pulse timings
in the order T1-T2-T3,
until the very last T3,
where it sees a much
longer negative period
once the state
machine runs out of
data.
This should look familiar if you refer back to Figure 3.
After thoroughly dissecting our program, and hopefully being satisfied that it will repeatedly send one well-formed data
bit to a string of WS2812 LEDs, we’re left with a question: where is the data coming from? This is more thoroughly
explained in the RP2350 Datasheet, but the data that we are shifting out from the OSR came from the state machine’s
TX FIFO. The TX FIFO is a data buffer between the state machine and the rest of RP-series microcontroller, filled either
via direct poking from the CPU, or by the system DMA, which is much faster.
The out instruction shifts data out from the OSR, and zeroes are shifted in from the other end to fill the vacuum.
Because the OSR is 32 bits wide, you will start getting zeroes once you have shifted out a total of 32 bits. There is a pull
instruction which explicitly takes data from the TX FIFO and put it in the OSR (stalling the state machine if the FIFO is
empty).
However, in the majority of cases it is simpler to configure autopull, a mode where the state machine automatically
refills the OSR from the TX FIFO (an automatic pull) when a configured number of bits have been shifted out. Autopull
happens in the background, in parallel with whatever else the state machine may be up to (in other words it has a cost
of zero cycles). We’ll see how this is configured in the next section.
3.2.2.2. State Machine Configuration
When we run pioasm on the .pio file we have been looking at, and ask it to spit out SDK code (which is the default), it will
create some static variables describing the program, and a method ws2812_default_program_config which configures a
PIO state machine based on user parameters, and the directives in the actual PIO program (namely the .side_set and
.wrap in this case).
Of course how you configure the PIO SM when using the program is very much related to the program you have written.
Rather than try to store a data representation off all that information, and parse it at runtime, for the use cases where
you’d like to encapsulate setup or other API functions with your PIO program, you can embed code within the .pio file.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.pio Lines 36 - 52
36 static inline void ws2812_program_init(PIO pio, uint sm, uint offset, uint pin, float freq,
Ê bool rgbw) {
37
38 pio_gpio_init(pio, pin);
39 pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
40
41 pio_sm_config c = ws2812_program_get_default_config(offset);
42 sm_config_set_sideset_pins(&c, pin);
43 sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24);
44 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
45
46 int cycles_per_bit = ws2812_T1 + ws2812_T2 + ws2812_T3;
47 float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
48 sm_config_set_clkdiv(&c, div);
49
50 pio_sm_init(pio, sm, offset, &c);
51 pio_sm_set_enabled(pio, sm, true);
52 }
In this case we are passing through code for the SDK, as requested by this line you will see if you click the link on the
above listing to see the context:
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 43

% c-sdk {
We have here a function ws2812_program_init which is provided to help the user to instantiate an instance of the LED
driver program, based on a handful of parameters:
pio
Which of the PIO instances we are dealing with
sm
Which state machine on that PIO we want to configure to run the WS2812 program
offset
Where the PIO program was loaded in PIO’s 5-bit program address space
pin
which GPIO pin our WS2812 LED chain is connected to
freq
The frequency (or rather baud rate) we want to output data at.
rgbw
True if we are using 4-colour LEDs (red, green, blue, white) rather than the usual 3.
Such that:
•
pio_gpio_init(pio, pin); Configure a GPIO for use by PIO. (Set the GPIO function select.)
•
pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true); Sets the PIO pin direction of 1 pin starting at pin number pin
to out
•
pio_sm_config c = ws2812_program_default_config(offset); Get the default configuration using the generated function
for this program (this includes things like the .wrap and .side_set configurations from the program). We’ll modify
this configuration before loading it into the state machine.
•
sm_config_set_sideset_pins(&c, pin); Sets the side-set to write to pins starting at pin pin (we say starting at because
if you had .side_set 3, then it would be outputting values on numbers pin, pin+1, pin+2)
•
sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24); False for shift_to_right (i.e. we want to shift out MSB
first). True for autopull. 32 or 24 for the number of bits for the autopull threshold, i.e. the point at which the state
machine triggers a refill of the OSR, depending on whether the LEDs are RGB or RGBW.
•
int cycles_per_bit = ws2812_T1 + ws2812_T2 + ws2812_T3; This is the total number of execution cycles to output a
single bit. Here we see the benefit of .define public; we can use the T1 - T3 values in our code.
•
float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit); sm_config_clkdiv(&c, div); Slow the state machine’s
execution down, based on the system clock speed and the number of execution cycles required per WS2812 data
bit, so that we achieve the correct bit rate.
•
pio_sm_init(pio, sm, offset, &c); Load our configuration into the state machine, and go to the start address (offset)
•
pio_sm_set_enabled(pio, sm, true); And make it go now!
At this point the program will be stuck on the first out waiting for data. This is because we have autopull enabled, the
OSR is initially empty, and there is no data to be pulled. The state machine refuses to continue until the first piece of
data arrives in the FIFO.
As an aside, this last point sheds some light on the slightly cryptic comment at the start of the PIO program:
Ê out x, 1 side 0 [T3 - 1] ; Side-set still takes place when instruction stalls
This comment is giving us an important piece of context. We stall on this instruction initially, before the first data is
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 44

added, and also every time we finish sending the last piece of data at the end of a long serial burst. When a state
machine stalls, it does not continue to the next instruction, rather it will reattempt the current instruction on the next
divided clock cycle. However, side-set still takes place. This works in our favour here, because we consequently always
return the line to the idle (low) state when we stall.
3.2.2.3. C Program
The companion to the .pio file we’ve looked at is a .c file which drives some interesting colour patterns out onto a string
of LEDs. We’ll just look at the parts that are directly relevant to PIO.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.c Lines 38 - 40
38 static inline void put_pixel(uint32_t pixel_grb) {
39 pio_sm_put_blocking(pio0, 0, pixel_grb << 8u);
40 }
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.c Lines 42 - 47
42 static inline uint32_t urgb_u32(uint8_t r, uint8_t g, uint8_t b) {
43 return
44 ((uint32_t) (r) << 8) |
45 ((uint32_t) (g) << 16) |
46 (uint32_t) (b);
47 }
Here we are writing 32-bit values into the FIFO, one at a time, directly from the CPU. pio_sm_put_blocking is a helper
method that waits until there is room in the FIFO before pushing your data.
You’ll notice the << 8 in put_pixel(): remember we are shifting out starting with the MSB, so we want the 24-bit colour
values at the top. This works fine for WGBR too, just that the W is always 0.
This program has a handful of colour patterns, which call our put_pixel helper above to output a sequence of pixel
values:
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.c Lines 71 - 76
71 void pattern_random(uint len, uint t) {
72 if (t % 8)
73 return;
74 for (uint i = 0; i < len; ++i)
75 put_pixel(rand());
76 }
The main function loads the program onto a PIO, configures a state machine for 800 kbaud WS2812 transmission, and
then starts cycling through the colour patterns randomly.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.c Lines 105 - 129
105 int main() {
106 //set_sys_clock_48();
107 stdio_init_all();
108 printf("WS2812 Smoke Test, using pin %d", WS2812_PIN);
109
110 // todo get free sm
111 PIO pio = pio0;
112 int sm = 0;
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 45

113 uint offset = pio_add_program(pio, &ws2812_program);
114
115 ws2812_program_init(pio, sm, offset, WS2812_PIN, 800000, IS_RGBW);
116
117 int t = 0;
118 while (1) {
119 int pat = rand() % count_of(pattern_table);
120 int dir = (rand() >> 30) & 1 ? 1 : -1;
121 puts(pattern_table[pat].name);
122 puts(dir == 1 ? "(forward)" : "(backward)");
123 for (int i = 0; i < 1000; ++i) {
124 pattern_table[pat].pat(NUM_PIXELS, t);
125 sleep_ms(10);
126 t += dir;
127 }
128 }
129 }
3.2.3. PIO and DMA (A Logic Analyser)
So far we have looked at writing data to PIO directly from the processor. This often leads to the processor spinning its
wheels waiting for room in a FIFO to make a data transfer, which is not a good investment of its time. It also limits the
total data throughput you can achieve.
RP-series microcontrollers are equipped with a powerful direct memory access unit (DMA), which can transfer data for
you in the background. Suitably programmed, the DMA can make quite long sequences of transfers without supervision.
Up to one word per system clock can be transferred to or from a PIO state machine, which is, to be quite technically
precise, more bandwidth than you can shake a stick at. The bandwidth is shared across all state machines, but you can
use the full amount on one state machine.
Let’s take a look at the logic_analyser example, which uses PIO to sample some of the RP-series microcontroller’s own
pins, and capture a logic trace of what is going on there, at full system speed.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/logic_analyser/logic_analyser.c Lines 40 - 63
40 void logic_analyser_init(PIO pio, uint sm, uint pin_base, uint pin_count, float div) {
41 // Load a program to capture n pins. This is just a single `in pins, n`
42 // instruction with a wrap.
43 uint16_t capture_prog_instr = pio_encode_in(pio_pins, pin_count);
44 struct pio_program capture_prog = {
45 .instructions = &capture_prog_instr,
46 .length = 1,
47 .origin = -1
48 };
49 uint offset = pio_add_program(pio, &capture_prog);
50
51 // Configure state machine to loop over this `in` instruction forever,
52 // with autopush enabled.
53 pio_sm_config c = pio_get_default_sm_config();
54 sm_config_set_in_pins(&c, pin_base);
55 sm_config_set_wrap(&c, offset, offset);
56 sm_config_set_clkdiv(&c, div);
57 // Note that we may push at a < 32 bit threshold if pin_count does not
58 // divide 32. We are using shift-to-right, so the sample data ends up
59 // left-justified in the FIFO in this case, with some zeroes at the LSBs.
60 sm_config_set_in_shift(&c, true, true, bits_packed_per_word(pin_count));
61 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_RX);
62 pio_sm_init(pio, sm, offset, &c);
63 }
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 46

Our program consists only of a single in pins, <pin_count> instruction, with program wrapping and autopull enabled.
Because the amount of data to be shifted is only known at runtime, and because the program is so short, we are
generating the program dynamically here (using the pio_encode_ functions) instead of pushing it through pioasm. The
program is wrapped in a data structure stating how big the program is, and where it must be loaded — in this case origin
= -1 meaning "don’t care".
Input Shift Register
The input shift register (ISR) is the mirror image of the OSR. Generally data flows through a state
machine in one of two directions: System → TX FIFO → OSR → Pins, or Pins → ISR → RX FIFO →
System. An in instruction shifts data into the ISR.
If you don’t need the ISR’s shifting ability — for example, if your program is output-only — you can use the
ISR as a third scratch register. It’s 32 bits in size, the same as X, Y and the OSR. The full details are in the
RP2350 Datasheet.
We load the program into the chosen PIO, and then configure the input pin mapping on the chosen state machine so
that its in pins instruction will see the pins we care about. For an in instruction we only need to worry about configuring
the base pin, i.e. the pin which is the least significant bit of the in instruction’s sample. The number of pins to be
sampled is determined by the bit count parameter of the in pins instruction — it will sample n pins starting at the base
we specified, and shift them into the ISR.
Pin Groups (Mapping)
We mentioned earlier that there are four pin groups to configure, to connect a state machine’s internal
data buses to the GPIOs it manipulates. A state machine accesses all pins within a group at once, and
pin groups can overlap. So far we have seen the out, side-set and in pin groups. The fourth is set.
The out group is the pins affected by shifting out data from the OSR, using out pins or out pindirs, up to
32 bits at a time. The set group is used with set pins and set pindirs instructions, up to 5 bits at a time,
with data that is encoded directly in the instruction. It’s useful for toggling control signals. The side-set
group is similar to the set group, but runs simultaneously with another instruction. Note: mov pin uses
the in or out group, depending on direction.
Configuring the clock divider optionally slows down the state machine’s execution: a clock divisor of n means 1
instruction will be executed per n system clock cycles. The default system clock frequency for SDK is 125MHz.
sm_config_set_in_shift sets the shift direction to rightward, enables autopush, and sets the autopush threshold to 32.
The state machine keeps an eye on the total amount of data shifted into the ISR, and on the in which reaches or
breaches a total shift count of 32 (or whatever number you have configured), the ISR contents, along with the new data
from the in. goes straight to the RX FIFO. The ISR is cleared to zero in the same operation.
sm_config_set_fifo_join is used to manipulate the FIFOs so that the DMA can get more throughput. If we want to sample
every pin on every clock cycle, that’s a lot of bandwidth! We’ve finished describing how the state machine should be
configured, so we use pio_sm_init to load the configuration into the state machine, and get the state machine into a
clean initial state.
FIFO Joining
Each state machine is equipped with a FIFO going in each direction: the TX FIFO buffers data on its way
out of the system, and the RX FIFO does the same for data coming in. Each FIFO has four data slots,
each holding 32 bits of data. Generally you want FIFOs to be as deep as possible, so there is more slack
time between the timing-critical operation of a peripheral, and data transfers from system agents which
may be quite busy or have high access latency. However this comes with significant hardware cost.
If you are only using one of the two FIFOs — TX or RX — a state machine can pool its resources to
provide a single FIFO with double the depth. The RP2350 Datasheet goes into much more detail,
including how this mechanism actually works under the hood.
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 47

Our state machine is ready to sample some pins. Let’s take a look at how we hook up the DMA to our state machine,
and tell the state machine to start sampling once it sees some trigger condition.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/logic_analyser/logic_analyser.c Lines 65 - 87
65 void logic_analyser_arm(PIO pio, uint sm, uint dma_chan, uint32_t *capture_buf, size_t
Ê capture_size_words,
66 uint trigger_pin, bool trigger_level) {
67 pio_sm_set_enabled(pio, sm, false);
68 // Need to clear _input shift counter_, as well as FIFO, because there may be
69 // partial ISR contents left over from a previous run. sm_restart does this.
70 pio_sm_clear_fifos(pio, sm);
71 pio_sm_restart(pio, sm);
72
73 dma_channel_config c = dma_channel_get_default_config(dma_chan);
74 channel_config_set_read_increment(&c, false);
75 channel_config_set_write_increment(&c, true);
76 channel_config_set_dreq(&c, pio_get_dreq(pio, sm, false));
77
78 dma_channel_configure(dma_chan, &c,
79 capture_buf, // Destination pointer
80 &pio->rxf[sm], // Source pointer
81 capture_size_words, // Number of transfers
82 true // Start immediately
83 );
84
85 pio_sm_exec(pio, sm, pio_encode_wait_gpio(trigger_level, trigger_pin));
86 pio_sm_set_enabled(pio, sm, true);
87 }
We want the DMA to read from the RX FIFO on our PIO state machine, so every DMA read is from the same address.
The write address, on the other hand, should increment after every DMA transfer so that the DMA gradually fills up our
capture buffer as data comes in. We need to specify a data request signal (DREQ) so that the DMA transfers data at the
proper rate.
Data request signals
The DMA can transfer data incredibly fast, and almost invariably this will be much faster than your PIO
program actually needs. The DMA paces itself based on a data request handshake with the state
machine, so there’s no worry about it overflowing or underflowing a FIFO, as long as you have selected
the correct DREQ signal. The state machine coordinates with the DMA to tell it when it has room
available in its TX FIFO, or data available in its RX FIFO.
We need to provide the DMA channel with an initial read address, an initial write address, and the total number of
reads/writes to be performed (not the total number of bytes). We start the DMA channel immediately — from this point
on, the DMA is poised, waiting for the state machine to produce data. As soon as data appears in the RX FIFO, the DMA
will pounce and whisk the data away to our capture buffer in system memory.
As things stand right now, the state machine will immediately go into a 1-cycle loop of in instructions once enabled.
Since the system memory available for capture is quite limited, it would be better for the state machine to wait for some
trigger before it starts sampling. Specifically, we are using a wait pin instruction to stall the state machine until a certain
pin goes high or low, and again we are using one of the pio_encode_ functions to encode this instruction on-the-fly.
pio_sm_exec tells the state machine to immediately execute some instruction you give it. This instruction never gets
written to the instruction memory, and if the instruction stalls (as it will in this case — a wait instruction’s job is to stall)
then the state machine will latch the instruction until it completes. With the state machine stalled on the wait instruction,
we can enable it without being immediately flooded by data.
At this point everything is armed and waiting for the trigger signal from the chosen GPIO. This will lead to the following
sequence of events:
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 48

1. The wait instruction will clear
2. On the very next cycle, state machine will start to execute in instructions from the program memory
3. As soon as data appears in the RX FIFO, the DMA will start to transfer it.
4. Once the requested amount of data has been transferred by the DMA, it’ll automatically stop
State Machine EXEC Functionality
So far our state machines have executed instructions from the instruction memory, but there are other
options. One is the SMx_INSTR register (used by pio_sm_exec()): the state machine will immediately execute
whatever you write here, momentarily interrupting the current program it’s running if necessary. This is
useful for poking around inside the state machine from the system side, for initial setup.
The other two options, which use the same underlying hardware, are out exec (shift out an instruction
from the data being streamed through the OSR, and execute it) and mov exec (execute an instruction
stashed in e.g. a scratch register). Besides making people’s eyes bulge, these are really useful if you
want the state machine to perform some data-defined operation at a certain point in an output stream.
The example code provides this cute function for displaying the captured logic trace as ASCII art in a terminal:
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/logic_analyser/logic_analyser.c Lines 89 - 108
Ê89 void print_capture_buf(const uint32_t *buf, uint pin_base, uint pin_count, uint32_t
Ê n_samples) {
Ê90 // Display the capture buffer in text form, like this:
Ê91 // 00: __--__--__--__--__--__--
Ê92 // 01: ____----____----____----
Ê93 printf("Capture:\n");
Ê94 // Each FIFO record may be only partially filled with bits, depending on
Ê95 // whether pin_count is a factor of 32.
Ê96 uint record_size_bits = bits_packed_per_word(pin_count);
Ê97 for (uint pin = 0; pin < pin_count; ++pin) {
Ê98 printf("%02d: ", pin + pin_base);
Ê99 for (uint32_t sample = 0; sample < n_samples; ++sample) {
100 uint bit_index = pin + sample * pin_count;
101 uint word_index = bit_index / record_size_bits;
102 // Data is left-justified in each FIFO entry, hence the (32 - record_size_bits)
Ê offset
103 uint word_mask = 1u << (bit_index % record_size_bits + 32 - record_size_bits);
104 printf(buf[word_index] & word_mask ? "-" : "_");
105 }
106 printf("\n");
107 }
108 }
We have everything we need now for a RP-series microcontroller to capture a logic trace of its own pins, whilst running
some other program. Here we’re setting up a PWM slice to output at around 15MHz on two GPIOs, and attaching our
brand spanking new logic analyser to those same two GPIOs.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/logic_analyser/logic_analyser.c Lines 110 - 159
110 int main() {
111 stdio_init_all();
112 printf("PIO logic analyser example\n");
113
114 // We're going to capture into a u32 buffer, for best DMA efficiency. Need
115 // to be careful of rounding in case the number of pins being sampled
116 // isn't a power of 2.
117 uint total_sample_bits = CAPTURE_N_SAMPLES * CAPTURE_PIN_COUNT;
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 49

118 total_sample_bits += bits_packed_per_word(CAPTURE_PIN_COUNT) - 1;
119 uint buf_size_words = total_sample_bits / bits_packed_per_word(CAPTURE_PIN_COUNT);
120 uint32_t *capture_buf = malloc(buf_size_words * sizeof(uint32_t));
121 hard_assert(capture_buf);
122
123 // Grant high bus priority to the DMA, so it can shove the processors out
124 // of the way. This should only be needed if you are pushing things up to
125 // >16bits/clk here, i.e. if you need to saturate the bus completely.
126 bus_ctrl_hw->priority = BUSCTRL_BUS_PRIORITY_DMA_W_BITS |
Ê BUSCTRL_BUS_PRIORITY_DMA_R_BITS;
127
128 PIO pio = pio0;
129 uint sm = 0;
130 uint dma_chan = 0;
131
132 logic_analyser_init(pio, sm, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, 1.f);
133
134 printf("Arming trigger\n");
135 logic_analyser_arm(pio, sm, dma_chan, capture_buf, buf_size_words, CAPTURE_PIN_BASE,
Ê true);
136
137 printf("Starting PWM example\n");
138 // PWM example: -----------------------------------------------------------
139 gpio_set_function(CAPTURE_PIN_BASE, GPIO_FUNC_PWM);
140 gpio_set_function(CAPTURE_PIN_BASE + 1, GPIO_FUNC_PWM);
141 // Topmost value of 3: count from 0 to 3 and then wrap, so period is 4 cycles
142 pwm_hw->slice[0].top = 3;
143 // Divide frequency by two to slow things down a little
144 pwm_hw->slice[0].div = 4 << PWM_CH0_DIV_INT_LSB;
145 // Set channel A to be high for 1 cycle each period (duty cycle 1/4) and
146 // channel B for 3 cycles (duty cycle 3/4)
147 pwm_hw->slice[0].cc =
148 (1 << PWM_CH0_CC_A_LSB) |
149 (3 << PWM_CH0_CC_B_LSB);
150 // Enable this PWM slice
151 pwm_hw->slice[0].csr = PWM_CH0_CSR_EN_BITS;
152 // ------------------------------------------------------------------------
153
154 // The logic analyser should have started capturing as soon as it saw the
155 // first transition. Wait until the last sample comes in from the DMA.
156 dma_channel_wait_for_finish_blocking(dma_chan);
157
158 print_capture_buf(capture_buf, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, CAPTURE_N_SAMPLES);
159 }
The output of the program looks like this:
Starting PWM example
Capture:
16: ----____________----____________----____________----____________----_______
17: ------------____------------____------------____------------____-----------
3.2.4. Further examples
Hopefully what you have seen so far has given some idea of how PIO applications can be built with the SDK. The
RP2350 Datasheet contains many more documented examples, which highlight particular hardware features of PIO, or
show how particular hardware interfaces can be implemented.
Raspberry Pi Pico-series C/C++ SDK
3.2. Getting started with PIO 50

You can also browse the pio/ directory in the Pico Examples repository.
3.3. Using PIOASM, the PIO Assembler
Up until now, we have glossed over the details of how the assembly program in our .pio file is translated into a binary
program, ready to be loaded into our PIO state machine. Programs that handle this task — translating assembly code
into binary — are generally referred to as assemblers, and PIO is no exception in this regard. The SDK includes an
assembler for PIO, called pioasm. The SDK handles the details of building this tool for you behind the scenes, and then
using it to build your PIO programs, for you to #include from your C or C++ program. pioasm can also be used directly, and
has a few features not used by the C++ SDK, such as generating programs suitable for use with the MicroPython PIO
library.
If you have built the pico-examples repository at any point, you will likely already have a pioasm binary in your build
directory, located under build/tools/pioasm/pioasm, which was bootstrapped for you before building any applications that
depend on it. If we want a standalone copy of pioasm, perhaps just to explore the available command-line options, we
can obtain it as follows (assuming the SDK is extracted at $PICO_SDK_PATH):
$ mkdir pioasm_build
$ cd pioasm_build
$ cmake $PICO_SDK_PATH/tools/pioasm
$ make
And then invoke as:
$ ./pioasm
3.3.1. Usage
A description of the command line arguments can be obtained by running:
$ pioasm -?
giving:
usage: pioasm <options> <input> (<output>)
Assemble file of PIO program(s) for use in applications.
<input> the input filename
<output> the output filename (or filename prefix if the output
Ê format produces multiple outputs).
Ê if not specified, a single output will be written to stdout
options:
-o <output_format> select output_format (default 'c-sdk'); available options are:
Ê c-sdk
Ê C header suitable for use with the Raspberry Pi Pico SDK
Ê python
Ê Python file suitable for use with MicroPython
Ê hex
Ê Raw hex output (only valid for single program inputs)
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 51
-v <version> specify the default PIO version (0 or 1)
-p <output_param> add a parameter to be passed to the outputter
-?, --help print this help and exit
NOTE
Within the SDK you do not need to invoke pioasm directly, as the CMake function pico_generate_pio_header(TARGET
PIO_FILE) takes care of invoking pioasm and adding the generated header to the include path of the target TARGET
for you.
3.3.2. Directives
The following directives control the assembly of PIO programs:
Table 4. alphabetical
list of pioasm
directives
.define ( PUBLIC ) <symbol> <value> Define an integer symbol named <symbol> with the value <value> (see Section
3.3.3). If this .define appears before the first program in the input file, then this
define is global to all programs, otherwise it is local to the program in which it
occurs. If PUBLIC is specified the symbol will be emitted into the assembled
output for use by user code. For the SDK this takes the form of:
#define <program_name>_<symbol> value for program symbols or #define <symbol>
value for global symbols
.clock_div <divider> If this directive is present, <divider> is the state machine clock divider for the
program. Note, that divider is a floating point value, but may not currently use
arithmetic expressions or defined values. This directive affects the default
state machine configuration for a program. This directive is only valid within a
program before the first instruction
.fifo <fifo_config> If this directive is present, it is used to specify the FIFO configuration for the
program. It affects the default state machine configuration for a program, but
also restricts what instructions may be used (for example PUSH makes no
sense if there is no IN FIFO configrued).
The following values are supported:
txrx: 4 FIFO entries for each of TX and RX; this is the default. tx - All 8 FIFO
entries for TX.
rx - All 8 FIFO entries for RX.
txput - 4 FIFO entries for TX, and 4 FIFO entries for mov rxfifo[index], isr aka
put. This value is not supported on PIO version 0.
txget - 4 FIFO entries for TX, and 4 FIFO entries for mov osr, rxfifo[index] aka
get. This value is not supported on PIO version 0.
putget - 4 FIFO entries for mov rxfifo[index], isr aka put, and 4 FIFO entries for
mov osr, rxfifo[index] aka get. This value is not supported on PIO version 0.
This directive is only valid within a program before the first instruction
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 52

.mov_status rxfifo < <n>
.mov_status txfifo < <n>
.mov_status irq <(next|prev)> set <n>
This directive configures the source for the mov , STATUS . One of the three
syntaxes can be used to set the status based on the RXFIFO level being below
a value N, the TXFIFO level being below a value N, or an IRQ flag N being set
on this PIO instance (or the next higer numbered, or lowered numbered PIO
instance if next or prev or specified). Note, that the IRQ option requires PIO
version 1.
This directive affects the default state machine configuration for a program.
This directive is only valid within a program before the first instruction
.in <count> (left|right) (auto)
(<threshold>)
If this directive is present, <count> indicates the number of IN bits to be used.
'left' or 'right' if specified, control the ISR shift direction; 'auto', if present,
enables "auto-push"; <threshold>, if present, specifies the "auto-push"
threshold. This directive affects the default state machine configuration for a
program. This directive is only valid within a program before the first
instruction
When assembling for PIO version 0, count must be 32.
.program <name> Start a new program with the name <name>. Note that that name is used in
code so should be alphanumeric/underscore not starting with a digit. The
program lasts until another .program directive or the end of the source file. PIO
instructions are only allowed within a program
.origin <offset> Optional directive to specify the PIO instruction memory offset at which the
program must load. Most commonly this is used for programs that must load
at offset 0, because they use data based JMPs with the (absolute) jmp target
being stored in only a few bits. This directive is invalid outside a program
.out <count> (left|right) (auto)
(<threshold>)
If this directive is present, <count> indicates the number of OUT bits to be
used. 'left' or 'right' if specified control the OSR shift direction; 'auto', if present,
enables "auto-pull"; <threshold>, if present, specifies the "auto-pull" threshold.
This directive affects the default state machine configuration for a program.
This directive is only valid within a program before the first instruction
.pio_version <version> This directive sets the target PIO hardware version. The version for RP2350 is
1 or RP2350, and is also the default version number. For backwards
compatibility with RP2040, 0 or RP2040 may be used.
If this directive appears before the first program in the input file, then this
define is the default for all programs, otherwise it specifies the version for the
program in which it occurs. If specified for a program, it must occur before the
first instruction.
.set <count> If this directive is present, <count> indicates the number of SET bits to be
used. This directive affects the default state machine configuration for a
program. This directive is only valid within a program before the first
instruction
.side_set <count> (opt) (pindirs) If this directive is present, <count> indicates the number of side-set bits to be
used. Additionally opt may be specified to indicate that a side <value> is
optional for instructions (note this requires stealing an extra bit — in addition
to the <count> bits — from those available for the instruction delay). Finally,
pindirs may be specified to indicate that the side set values should be applied
to the PINDIRs and not the PINs. This directive is only valid within a program
before the first instruction
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 53

.wrap_target Place prior to an instruction, this directive specifies the instruction where
execution continues due to program wrapping. This directive is invalid outside
of a program, may only be used once within a program, and if not specified
defaults to the start of the program
.wrap Placed after an instruction, this directive specifies the instruction after which,
in normal control flow (i.e. jmp with false condition, or no jmp), the program
wraps (to .wrap_target instruction). This directive is invalid outside of a
program, may only be used once within a program, and if not specified
defaults to after the last program instruction.
.lang_opt <lang> <name> <option> Specifies an option for the program related to a particular language generator.
(See Section 3.3.10). This directive is invalid outside of a program
.word <value> Stores a raw 16-bit value as an instruction in the program. This directive is
invalid outside of a program.
3.3.3. Values
The following types of values can be used to define integer numbers or branch targets
Table 5. Values in
pioasm, i.e. <value>
integer An integer value e.g. 3 or -7
hex A hexadecimal value e.g. 0xf
binary A binary value e.g. 0b1001
symbol A value defined by a .define (see [pioasm_define])
<label> The instruction offset of the label within the program. This makes most sense when used with
a JMP instruction (see Section 3.4.4)
( <expression> ) An expression to be evaluated; see expressions. Note that the parentheses are necessary.
3.3.4. Expressions
Expressions may be freely used within pioasm values.
Table 6. Expressions
in pioasm i.e.
<expression>
<expression> + <expression> The sum of two expressions
<expression> - <expression> The difference of two expressions
<expression> * <expression> The multiplication of two expressions
<expression> / <expression> The integer division of two expressions
- <expression> The negation of another expression
<expression> << <expression> One expression shifted left by another expression
<expression> >> <expression> One expression shifted right by another expression
:: <expression> The bit reverse of another expression
<value> Any value (see Section 3.3.3)
3.3.5. Comments
Line comments are supported with // or ;
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 54

C-style block comments are supported via /* and */
3.3.6. Labels
Labels are of the form:
<symbol>:
or
PUBLIC <symbol>:
at the start of a line.
TIP
A label is really just an automatic .define with a value set to the current program instruction offset. A PUBLIC label is
exposed to the user code in the same way as a PUBLIC .define.
3.3.7. Instructions
All pioasm instructions follow a common pattern:
<instruction> (side <side_set_value>) ([<delay_value>])
where:
<instruction> Is an assembly instruction detailed in the following sections. (See Section 3.4)
<side_set_value> Is a value (see Section 3.3.3) to apply to the side_set pins at the start of the instruction. Note that
the rules for a side-set value via side <side_set_value> are dependent on the .side_set (see
[pioasm_side_set]) directive for the program. If no .side_set is specified then the side
<side_set_value> is invalid, if an optional number of sideset pins is specified then side
<side_set_value> may be present, and if a non-optional number of sideset pins is specified, then
side <side_set_value> is required. The <side_set_value> must fit within the number of side-set bits
specified in the .side_set directive.
<delay_value> Specifies the number of cycles to delay after the instruction completes. The delay_value is
specified as a value (see Section 3.3.3), and in general is between 0 and 31 inclusive (a 5-bit
value), however the number of bits is reduced when sideset is enabled via the .side_set (see
[pioasm_side_set]) directive. If the <delay_value> is not present, then the instruction has no delay
NOTE
pioasm instruction names, keywords and directives are case insensitive; lower case is used in the Assembly Syntax
sections below as this is the style used in the SDK.
NOTE
Commas appear in some Assembly Syntax sections below, but are entirely optional, e.g. out pins, 3 may be written
out pins 3, and jmp x-- label may be written as jmp x--, label. The Assembly Syntax sections below uses the first
style in each case as this is the style used in the SDK.
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 55

3.3.8. Pseudoinstructions
Currently pioasm provides one pseudoinstruction, as a convenience:
nop
Assembles to mov y, y. "No operation", has no particular side effect, but a useful vehicle for a side-set
operation or an extra delay.
3.3.9. Output pass through
Text in the PIO file may be passed, unmodified, to the output based on the language generator being used.
For example the following (comment and function) would be included in the generated header when the default c-sdk
language generator is used.
% c-sdk {
// an inline function (since this is going in a header file)
static inline int some_c_code() {
Ê return 0;
}
%}
The general format is
% target {
pass through contents
%}
with targets being recognized by a particular language generator (see Section 3.3.10; note that target is usually the
language generator name e.g. c-sdk, but could potentially be some_language.some_group if the language generator supports
different classes of pass through with different output locations.
This facility allows you to encapsulate both the PIO program and the associated setup required in the same source file.
See Section 3.3.10 for a more complete example.
3.3.10. Language generators
The following example shows a multi program source file (with multiple programs) which we will use to highlight c-sdk
and python output features
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/ws2812.pio
Ê1 ;
Ê2 ; Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 ;
Ê4 ; SPDX-License-Identifier: BSD-3-Clause
Ê5 ;
Ê6 .pio_version 0 // only requires PIO version 0
Ê7
Ê8 .program ws2812
Ê9 .side_set 1
10
11 ; The following constants are selected for broad compatibility with WS2812,
12 ; WS2812B, and SK6812 LEDs. Other constants may support higher bandwidths for
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 56

13 ; specific LEDs, such as (7,10,8) for WS2812B LEDs.
14
15 .define public T1 3
16 .define public T2 3
17 .define public T3 4
18
19 .lang_opt python sideset_init = pico.PIO.OUT_HIGH
20 .lang_opt python out_init = pico.PIO.OUT_HIGH
21 .lang_opt python out_shiftdir = 1
22
23 .wrap_target
24 bitloop:
25 out x, 1 side 0 [T3 - 1] ; Side-set still takes place when instruction stalls
26 jmp !x do_zero side 1 [T1 - 1] ; Branch on the bit we shifted out. Positive pulse
27 do_one:
28 jmp bitloop side 1 [T2 - 1] ; Continue driving high, for a long pulse
29 do_zero:
30 nop side 0 [T2 - 1] ; Or drive low, for a short pulse
31 .wrap
32
33 % c-sdk {
34 #include "hardware/clocks.h"
35
36 static inline void ws2812_program_init(PIO pio, uint sm, uint offset, uint pin, float freq,
Ê bool rgbw) {
37
38 pio_gpio_init(pio, pin);
39 pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
40
41 pio_sm_config c = ws2812_program_get_default_config(offset);
42 sm_config_set_sideset_pins(&c, pin);
43 sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24);
44 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
45
46 int cycles_per_bit = ws2812_T1 + ws2812_T2 + ws2812_T3;
47 float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
48 sm_config_set_clkdiv(&c, div);
49
50 pio_sm_init(pio, sm, offset, &c);
51 pio_sm_set_enabled(pio, sm, true);
52 }
53 %}
54
55 .program ws2812_parallel
56
57 .define public T1 3
58 .define public T2 3
59 .define public T3 4
60
61 .wrap_target
62 out x, 32
63 mov pins, !null [T1-1]
64 mov pins, x [T2-1]
65 mov pins, null [T3-2]
66 .wrap
67
68 % c-sdk {
69 #include "hardware/clocks.h"
70
71 static inline void ws2812_parallel_program_init(PIO pio, uint sm, uint offset, uint pin_base,
Ê uint pin_count, float freq) {
72 for(uint i=pin_base; i<pin_base+pin_count; i++) {
73 pio_gpio_init(pio, i);
74 }
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 57

75 pio_sm_set_consecutive_pindirs(pio, sm, pin_base, pin_count, true);
76
77 pio_sm_config c = ws2812_parallel_program_get_default_config(offset);
78 sm_config_set_out_shift(&c, true, true, 32);
79 sm_config_set_out_pins(&c, pin_base, pin_count);
80 sm_config_set_set_pins(&c, pin_base, pin_count);
81 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
82
83 int cycles_per_bit = ws2812_parallel_T1 + ws2812_parallel_T2 + ws2812_parallel_T3;
84 float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
85 sm_config_set_clkdiv(&c, div);
86
87 pio_sm_init(pio, sm, offset, &c);
88 pio_sm_set_enabled(pio, sm, true);
89 }
90 %}
3.3.10.1. c-sdk
The c-sdk language generator produces a single header file with all the programs in the PIO source file:
The pass through sections (% c-sdk {) are embedded in the output, and the PUBLIC defines are available via #define
TIP
pioasm creates a function for each program (e.g. ws2812_program_get_default_config()) returning a pio_sm_config based
on the .side_set, .wrap and .wrap_target settings of the program, which you can then use as a basis for configuration
the PIO state machine.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/generated/ws2812.pio.h
ÊÊ1 // -------------------------------------------------- //
ÊÊ2 // This file is autogenerated by pioasm; do not edit! //
ÊÊ3 // -------------------------------------------------- //
ÊÊ4
ÊÊ5 #pragma once
ÊÊ6
ÊÊ7 #include "hardware/pio.h"
ÊÊ8
ÊÊ9 // ------ //
Ê10 // ws2812 //
Ê11 // ------ //
Ê12
Ê13 #define ws2812_wrap_target 0
Ê14 #define ws2812_wrap 3
Ê15 #define ws2812_pio_version 0
Ê16
Ê17 #define ws2812_T1 2
Ê18 #define ws2812_T2 5
Ê19 #define ws2812_T3 3
Ê20
Ê21 static const uint16_t ws2812_program_instructions[] = {
Ê22 // .wrap_target
Ê23 0x6221, // 0: out x, 1 side 0 [2]
Ê24 0x1123, // 1: jmp !x, 3 side 1 [1]
Ê25 0x1400, // 2: jmp 0 side 1 [4]
Ê26 0xa442, // 3: nop side 0 [4]
Ê27 // .wrap
Ê28 };
Ê29
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 58

Ê30 static const struct pio_program ws2812_program = {
Ê31 .instructions = ws2812_program_instructions,
Ê32 .length = 4,
Ê33 .origin = -1,
Ê34 .pio_version = 0,
Ê35 .used_gpio_ranges = 0x0
Ê36 #endif
Ê37 };
Ê38
Ê39 static inline pio_sm_config ws2812_program_get_default_config(uint offset) {
Ê40 pio_sm_config c = pio_get_default_sm_config();
Ê41 sm_config_set_wrap(&c, offset + ws2812_wrap_target, offset + ws2812_wrap);
Ê42 sm_config_set_sideset(&c, 1, false, false);
Ê43 return c;
Ê44 }
Ê45
Ê46 #include "hardware/clocks.h"
Ê47 static inline void ws2812_program_init(PIO pio, uint sm, uint offset, uint pin, float freq,
Ê bool rgbw) {
Ê48 pio_gpio_init(pio, pin);
Ê49 pio_sm_set_consecutive_pindirs(pio, sm, pin, 1, true);
Ê50 pio_sm_config c = ws2812_program_get_default_config(offset);
Ê51 sm_config_set_sideset_pins(&c, pin);
Ê52 sm_config_set_out_shift(&c, false, true, rgbw ? 32 : 24);
Ê53 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
Ê54 int cycles_per_bit = ws2812_T1 + ws2812_T2 + ws2812_T3;
Ê55 float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
Ê56 sm_config_set_clkdiv(&c, div);
Ê57 pio_sm_init(pio, sm, offset, &c);
Ê58 pio_sm_set_enabled(pio, sm, true);
Ê59 }
Ê60
Ê61
Ê62 // --------------- //
Ê63 // ws2812_parallel //
Ê64 // --------------- //
Ê65
Ê66 #define ws2812_parallel_wrap_target 0
Ê67 #define ws2812_parallel_wrap 3
Ê68 #define ws2812_parallel_pio_version 0
Ê69
Ê70 #define ws2812_parallel_T1 2
Ê71 #define ws2812_parallel_T2 5
Ê72 #define ws2812_parallel_T3 3
Ê73
Ê74 static const uint16_t ws2812_parallel_program_instructions[] = {
Ê75 // .wrap_target
Ê76 0x6020, // 0: out x, 32
Ê77 0xa10b, // 1: mov pins, !null [1]
Ê78 0xa401, // 2: mov pins, x [4]
Ê79 0xa103, // 3: mov pins, null [1]
Ê80 // .wrap
Ê81 };
Ê82
Ê83 static const struct pio_program ws2812_parallel_program = {
Ê84 .instructions = ws2812_parallel_program_instructions,
Ê85 .length = 4,
Ê86 .origin = -1,
Ê87 .pio_version = 0,
Ê88 .used_gpio_ranges = 0x0
Ê89 #endif
Ê90 };
Ê91
Ê92 static inline pio_sm_config ws2812_parallel_program_get_default_config(uint offset) {
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 59

Ê93 pio_sm_config c = pio_get_default_sm_config();
Ê94 sm_config_set_wrap(&c, offset + ws2812_parallel_wrap_target, offset +
Ê ws2812_parallel_wrap);
Ê95 return c;
Ê96 }
Ê97
Ê98 #include "hardware/clocks.h"
Ê99 static inline void ws2812_parallel_program_init(PIO pio, uint sm, uint offset, uint
Ê pin_base, uint pin_count, float freq) {
100 for(uint i=pin_base; i<pin_base+pin_count; i++) {
101 pio_gpio_init(pio, i);
102 }
103 pio_sm_set_consecutive_pindirs(pio, sm, pin_base, pin_count, true);
104 pio_sm_config c = ws2812_parallel_program_get_default_config(offset);
105 sm_config_set_out_shift(&c, true, true, 32);
106 sm_config_set_out_pins(&c, pin_base, pin_count);
107 sm_config_set_set_pins(&c, pin_base, pin_count);
108 sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_TX);
109 int cycles_per_bit = ws2812_parallel_T1 + ws2812_parallel_T2 + ws2812_parallel_T3;
110 float div = clock_get_hz(clk_sys) / (freq * cycles_per_bit);
111 sm_config_set_clkdiv(&c, div);
112 pio_sm_init(pio, sm, offset, &c);
113 pio_sm_set_enabled(pio, sm, true);
114 }
3.3.10.2. python
The python language generator produces a single python file with all the programs in the PIO source file:
The pass through sections (% python {) would be embedded in the output, and the PUBLIC defines are available as python
variables.
Also note the use of .lang_opt python to pass initializers for the @pico.asm_pio decorator
TIP
The python language output is provided as a utility. MicroPython supports programming with the PIO natively, so you
may only want to use pioasm when sharing PIO code between the SDK and MicroPython. No effort is currently made
to preserve label names, symbols or comments, as it is assumed you are either using the PIO file as a source or
python; not both. The python language output can of course be used to bootstrap your MicroPython PIO
development based on an existing PIO file.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/ws2812/generated/ws2812.py
Ê1 # -------------------------------------------------- #
Ê2 # This file is autogenerated by pioasm; do not edit! #
Ê3 # -------------------------------------------------- #
Ê4
Ê5 import rp2
Ê6 from machine import Pin
Ê7 # ------ #
Ê8 # ws2812 #
Ê9 # ------ #
10
11 ws2812_T1 = 3
12 ws2812_T2 = 3
13 ws2812_T3 = 4
14
15 @rp2.asm_pio(sideset_init=pico.PIO.OUT_HIGH, out_init=pico.PIO.OUT_HIGH, out_shiftdir=1)
16 def ws2812():
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 60
17 wrap_target()
18 label("0")
19 out(x, 1) .side(0) [3] # 0
20 jmp(not_x, "3") .side(1) [2] # 1
21 jmp("0") .side(1) [2] # 2
22 label("3")
23 nop() .side(0) [2] # 3
24 wrap()
25
26
27
28 # --------------- #
29 # ws2812_parallel #
30 # --------------- #
31
32 ws2812_parallel_T1 = 3
33 ws2812_parallel_T2 = 3
34 ws2812_parallel_T3 = 4
35
36 @rp2.asm_pio()
37 def ws2812_parallel():
38 wrap_target()
39 out(x, 32) # 0
40 mov(pins, invert(null)) [2] # 1
41 mov(pins, x) [2] # 2
42 mov(pins, null) [2] # 3
43 wrap()
3.3.10.3. hex
The hex generator only supports a single input program, as it just dumps the raw instructions (one per line) as a 4-
character hexadecimal number.
Given:
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/squarewave/squarewave.pio
Ê1 ;
Ê2 ; Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 ;
Ê4 ; SPDX-License-Identifier: BSD-3-Clause
Ê5 ;
Ê6 .pio_version 0 // only requires PIO version 0
Ê7
Ê8 .program squarewave
Ê9 set pindirs, 1 ; Set pin to output
10 again:
11 set pins, 1 [1] ; Drive pin high and then delay for one cycle
12 set pins, 0 ; Drive pin low
13 jmp again ; Set PC to label `again`
The hex output produces:
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/master/pio/squarewave/generated/squarewave.hex
1 e081
2 e101
3 e000
Raspberry Pi Pico-series C/C++ SDK
3.3. Using PIOASM, the PIO Assembler 61

4 0001
3.4. PIO Instruction Set Reference
NOTE
This section refers in places to concepts and pieces of hardware discussed in the RP2350 Datasheet. You are
encouraged to read the PIO chapter of the datasheet to get the full context for what these instructions do.
The following sections document instruction behaviour on both PIO version 0 (RP2040) and PIO version 1 (RP2350).
When no version restrictions are mentioned, this means the behaviour applies to both versions. PIO version 1 is strictly
additive over version 0, so some features may be indicated as version-1-only, but none are version-0-only.
For documentation specific to a particular PIO version, see the device datasheet for a device equipped with that version.
3.4.1. Encoding (version 0, RP2040)
PIO instructions are 16 bits long, and have the following encoding:
Table 7. PIO
instruction encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
JMP 0 0 0 Delay/side-set Condition Address
WAIT 0 0 1 Delay/side-set Pol Source Index
IN 0 1 0 Delay/side-set Source Bit count
OUT 0 1 1 Delay/side-set Destination Bit count
PUS
H
1 0 0 Delay/side-set 0 IfF Blk 0 0 0 0 0
PULL 1 0 0 Delay/side-set 1 IfE Blk 0 0 0 0 0
MOV 1 0 1 Delay/side-set Destination Op Source
IRQ 1 1 0 Delay/side-set 0 Clr Wait Index
SET 1 1 1 Delay/side-set Destination Data
3.4.2. Encoding (version 1, RP2350)
PIO instructions are 16 bits long, and have the following encoding:
Table 8. PIO
instruction encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
JMP 0 0 0 Delay/side-set Condition Address
WAIT 0 0 1 Delay/side-set Pol Source Index
IN 0 1 0 Delay/side-set Source Bit count
OUT 0 1 1 Delay/side-set Destination Bit count
PUSH 1 0 0 Delay/side-set 0 IfF Blk 0 0 0 0 0
MOV 1 0 0 Delay/side-set 0 0 0 1 IdxI 0 Index
PULL 1 0 0 Delay/side-set 1 IfE Blk 0 0 0 0 0
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 62

Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MOV 1 0 0 Delay/side-set 1 0 0 1 IdxI 0 Index
MOV 1 0 1 Delay/side-set Destination Op Source
IRQ 1 1 0 Delay/side-set 0 Clr Wait IdxMode Index
SET 1 1 1 Delay/side-set Destination Data
3.4.3. Summary
All PIO instructions execute in one clock cycle.
The Delay/side-set field is present in all instructions. Its exact use is configured for each state machine by
PINCTRL_SIDESET_COUNT:
•
Up to 5 MSBs encode a side-set operation, which optionally asserts a constant value onto some GPIOs,
concurrently with main instruction execution logic
•
Remaining LSBs (up to 5) encode the number of idle cycles inserted between this instruction and the next
3.4.4. JMP
3.4.4.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
JMP
0 0 0 Delay/side-set Condition Address
3.4.4.2. Operation
Set program counter to Address if Condition is true, otherwise no operation.
Delay cycles on a JMP always take effect, whether Condition is true or false, and they take place after Condition is
evaluated and the program counter is updated.
•
Condition:
◦
000: (no condition): Always
◦
001: !X: scratch X zero
◦
010: X--: scratch X non-zero, prior to decrement
◦
011: !Y: scratch Y zero
◦
100: Y--: scratch Y non-zero, prior to decrement
◦
101: X!=Y: scratch X not equal scratch Y
◦
110: PIN: branch on input pin
◦
111: !OSRE: output shift register not empty
•
Address: Instruction address to jump to. In the instruction encoding this is an absolute address within the PIO
instruction memory.
JMP PIN branches on the GPIO selected by EXECCTRL_JMP_PIN, a configuration field which selects one out of the maximum
of 32 GPIO inputs visible to a state machine, independently of the state machine’s other input mapping. The branch is
taken if the GPIO is high.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 63

!OSRE compares the bits shifted out since the last PULL with the shift count threshold configured by SHIFTCTRL_PULL_THRESH.
This is the same threshold used by autopull.
JMP X-- and JMP Y-- always decrement scratch register X or Y, respectively. The decrement is not conditional on the
current value of the scratch register. The branch is conditioned on the initial value of the register, i.e. before the
decrement took place: if the register is initially nonzero, the branch is taken.
3.4.4.3. Assembler Syntax
jmp ( <cond> ) <target>
where:
<cond> Is an optional condition listed above (e.g. !x for scratch X zero). If a condition code is not specified,
the branch is always taken
<target> Is a program label or value (see Section 3.3.3) representing instruction offset within the program (the
first instruction being offset 0). Note that because the PIO JMP instruction uses absolute addresses
in the PIO instruction memory, JMPs need to be adjusted based on the program load offset at
runtime. This is handled for you when loading a program with the SDK, but care should be taken when
encoding JMP instructions for use by OUT EXEC
3.4.5. WAIT
3.4.5.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
WAIT
0 0 1 Delay/side-set Pol Source Index
3.4.5.2. Operation
Stall until some condition is met.
Like all stalling instructions, delay cycles begin after the instruction completes. That is, if any delay cycles are present,
they do not begin counting until after the wait condition is met.
•
Polarity:
◦
1: wait for a 1.
◦
0: wait for a 0.
•
Source: what to wait on. Values are:
◦
00: GPIO: System GPIO input selected by Index. This is an absolute GPIO index, and is not affected by the state
machine’s input IO mapping.
◦
01: PIN: Input pin selected by Index. This state machine’s input IO mapping is applied first, and then Index
selects which of the mapped bits to wait on. In other words, the pin is selected by adding Index to the
PINCTRL_IN_BASE configuration, modulo 32.
◦
10: IRQ: PIO IRQ flag selected by Index
◦
11: (_version 1 and above_) JMPPIN: wait on the pin indexed by the PINCTRL_JMP_PIN configuration, plus an Index
in the range 0-3, all modulo 32. Other values of Index are reserved.
•
Index: which pin or bit to check.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 64

WAIT x IRQ behaves slightly differently from other WAIT sources:
•
If Polarity is 1, the selected IRQ flag is cleared by the state machine upon the wait condition being met.
•
The flag index is decoded in the same way as the IRQ index field, decoding down from the two MSBs (aligning with
the IRQ instruction IdxMode field):
◦
00: the three LSBs are used directly to index the IRQ flags in this PIO block.
◦
01 (_version 1 and above_) (PREV), the instruction references an IRQ from the next-lower-numbered PIO in the
system, wrapping to the highest-numbered PIO if this is PIO0.
◦
10 (REL), the state machine ID (0…3) is added to the IRQ index, by way of modulo-4 addition on the two LSBs.
For example, state machine 2 with a flag value of '0x11' will wait on flag 3, and a flag value of '0x13' will wait
on flag 1. This allows multiple state machines running the same program to synchronise with each other.
◦
11 (_version 1 and above_) (NEXT), the instruction references an IRQ from the next-higher-numbered PIO in the
system, wrapping to PIO0 if this is the highest-numbered PIO.
CAUTION
WAIT 1 IRQ x should not be used with IRQ flags presented to the interrupt controller, to avoid a race condition with a
system interrupt handler
3.4.5.3. Assembler Syntax
wait <polarity> gpio <gpio_num>
wait <polarity> pin <pin_num>
wait <polarity> irq <irq_num> ( rel )
where:
<polarity> Is a value (see Section 3.3.3) specifying the polarity (either 0 or 1)
<pin_num> Is a value (see Section 3.3.3) specifying the input pin number (as mapped by the SM input pin
mapping)
<gpio_num> Is a value (see Section 3.3.3) specifying the actual GPIO pin number
<irq_num> ( rel ) Is a value (see Section 3.3.3) specifying The irq number to wait on (0-7). If rel is present, then the
actual irq number used is calculating by replacing the low two bits of the irq number (irq_num
10
)
with the low two bits of the sum (irq_num
10
+ sm_num
10
) where sm_num
10
is the state machine
number
3.4.6. IN
3.4.6.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
IN
0 1 0 Delay/side-set Source Bit count
3.4.6.2. Operation
Shift Bit count bits from Source into the Input Shift Register (ISR). Shift direction is configured for each state machine by
SHIFTCTRL_IN_SHIFTDIR. Additionally, increase the input shift count by Bit count, saturating at 32.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 65

•
Source:
◦
000: PINS
◦
001: X (scratch register X)
◦
010: Y (scratch register Y)
◦
011: NULL (all zeroes)
◦
100: Reserved
◦
101: Reserved
◦
110: ISR
◦
111: OSR
•
Bit count: How many bits to shift into the ISR. 1…32 bits, 32 is encoded as 00000.
If automatic push is enabled, IN will also push the ISR contents to the RX FIFO if the push threshold is reached
(SHIFTCTRL_PUSH_THRESH). IN still executes in one cycle, whether an automatic push takes place or not. The state machine
will stall if the RX FIFO is full when an automatic push occurs. An automatic push clears the ISR contents to all-zeroes,
and clears the input shift count.
IN always uses the least significant Bit count bits of the source data. For example, if PINCTRL_IN_BASE is set to 5, the
instruction IN PINS, 3 will take the values of pins 5, 6 and 7, and shift these into the ISR. First the ISR is shifted to the left
or right to make room for the new input data, then the input data is copied into the gap this leaves. The bit order of the
input data is not dependent on the shift direction.
NULL can be used for shifting the ISR’s contents. For example, UARTs receive the LSB first, so must shift to the right.
After 8 IN PINS, 1 instructions, the input serial data will occupy bits 31…24 of the ISR. An IN NULL, 24 instruction will shift
in 24 zero bits, aligning the input data at ISR bits 7…0. Alternatively, the processor or DMA could perform a byte read
from FIFO address + 3, which would take bits 31…24 of the FIFO contents.
3.4.6.3. Assembler Syntax
in <source>, <bit_count>
where:
<source> Is one of the sources specified above.
<bit_count> Is a value (see Section 3.3.3) specifying the number of bits to shift (valid range 1-32)
3.4.7. OUT
3.4.7.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
OUT
0 1 1 Delay/side-set Destination Bit count
3.4.7.2. Operation
Shift Bit count bits out of the Output Shift Register (OSR), and write those bits to Destination. Additionally, increase the
output shift count by Bit count, saturating at 32.
•
Destination:
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 66

◦
000: PINS
◦
001: X (scratch register X)
◦
010: Y (scratch register Y)
◦
011: NULL (discard data)
◦
100: PINDIRS
◦
101: PC
◦
110: ISR (also sets ISR shift counter to Bit count)
◦
111: EXEC (Execute OSR shift data as instruction)
•
Bit count: how many bits to shift out of the OSR. 1…32 bits, 32 is encoded as 00000.
A 32-bit value is written to Destination: the lower Bit count bits come from the OSR, and the remainder are zeroes. This
value is the least significant Bit count bits of the OSR if SHIFTCTRL_OUT_SHIFTDIR is to the right, otherwise it is the most
significant bits.
PINS and PINDIRS use the OUT pin mapping.
If automatic pull is enabled, the OSR is automatically refilled from the TX FIFO if the pull threshold, SHIFTCTRL_PULL_THRESH,
is reached. The output shift count is simultaneously cleared to 0. In this case, the OUT will stall if the TX FIFO is empty,
but otherwise still executes in one cycle.
OUT EXEC allows instructions to be included inline in the FIFO datastream. The OUT itself executes on one cycle, and the
instruction from the OSR is executed on the next cycle. There are no restrictions on the types of instructions which can
be executed by this mechanism. Delay cycles on the initial OUT are ignored, but the executee may insert delay cycles as
normal.
OUT PC behaves as an unconditional jump to an address shifted out from the OSR.
3.4.7.3. Assembler Syntax
out <destination>, <bit_count>
where:
<destination> Is one of the destinations specified above.
<bit_count> Is a value (see Section 3.3.3) specifying the number of bits to shift (valid range 1-32)
3.4.8. PUSH
3.4.8.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PUSH
1 0 0 Delay/side-set 0 IfF Blk 0 0 0 0 0
3.4.8.2. Operation
Push the contents of the ISR into the RX FIFO, as a single 32-bit word. Clear ISR to all-zeroes.
•
IfFull: If 1, do nothing unless the total input shift count has reached its threshold, SHIFTCTRL_PUSH_THRESH (the same
as for autopush).
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 67

•
Block: If 1, stall execution if RX FIFO is full.
PUSH IFFULL helps to make programs more compact, like autopush. It is useful in cases where the IN would stall at an
inappropriate time if autopush were enabled, e.g. if the state machine is asserting some external control signal at this
point.
The PIO assembler sets the Block bit by default. If the Block bit is not set, the PUSH does not stall on a full RX FIFO, instead
continuing immediately to the next instruction. The FIFO state and contents are unchanged when this happens. The ISR
is still cleared to all-zeroes, and the FDEBUG_RXSTALL flag is set (the same as a blocking PUSH or autopush to a full RX FIFO)
to indicate data was lost.
3.4.8.3. Assembler Syntax
push ( iffull )
push ( iffull ) block
push ( iffull ) noblock
where:
iffull Is equivalent to IfFull == 1 above. i.e. the default if this is not specified is IfFull == 0
block Is equivalent to Block == 1 above. This is the default if neither block nor noblock are specified
noblock Is equivalent to Block == 0 above.
3.4.9. PULL
3.4.9.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
PULL
1 0 0 Delay/side-set 1 IfE Blk 0 0 0 0 0
3.4.9.2. Operation
Load a 32-bit word from the TX FIFO into the OSR.
•
IfEmpty: If 1, do nothing unless the total output shift count has reached its threshold, SHIFTCTRL_PULL_THRESH (the
same as for autopull).
•
Block: If 1, stall if TX FIFO is empty. If 0, pulling from an empty FIFO copies scratch X to OSR.
Some peripherals (UART, SPI…) should halt when no data is available, and pick it up as it comes in; others (I2S) should
clock continuously, and it is better to output placeholder or repeated data than to stop clocking. This can be achieved
with the Block parameter.
A nonblocking PULL on an empty FIFO has the same effect as MOV OSR, X. The program can either preload scratch register
X with a suitable default, or execute a MOV X, OSR after each PULL NOBLOCK, so that the last valid FIFO word will be recycled
until new data is available.
PULL IFEMPTY is useful if an OUT with autopull would stall in an inappropriate location when the TX FIFO is empty. For
example, a UART transmitter should not stall immediately after asserting the start bit. IfEmpty permits some of the same
program simplifications as autopull, but the stall occurs at a controlled point in the program.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 68

NOTE
When autopull is enabled, any PULL instruction is a no-op when the OSR is full, so that the PULL instruction behaves as
a barrier. OUT NULL, 32 can be used to explicitly discard the OSR contents. See the RP2350 Datasheet for more detail
on autopull.
3.4.9.3. Assembler Syntax
pull ( ifempty )
pull ( ifempty ) block
pull ( ifempty ) noblock
where:
ifempty Is equivalent to IfEmpty == 1 above. i.e. the default if this is not specified is IfEmpty == 0
block Is equivalent to Block == 1 above. This is the default if neither block nor noblock are specified
noblock Is equivalent to Block == 0 above.
3.4.10. MOV (to RX)
3.4.10.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MOV
1 0 0 Delay/side-set 0 0 0 1 IdxI Index
(_version 1 and above_)
3.4.10.2. Operation
Write the ISR to a selected RX FIFO entry. The state machine can write the RX FIFO entries in any order, indexed either
by the Y register, or an immediate Index in the instruction. Requires the SHIFTCTRL_FJOIN_RX_PUT configuration field to be
set, otherwise its operation is undefined. The FIFO configuration can be specified for the program via the .fifo directive
(see pioasm_fifo).
If IdxI (index by immediate) is set, the RX FIFO’s registers are indexed by the two least-significant bits of the Index
operand. Otherwise, they are indexed by the two least-significant bits of the Y register. When IdxI is clear, all nonzero
values of Index are reserved encodings, and their operation is undefined.
When only SHIFTCTRL_FJOIN_RX_PUT is set (in SM0_SHIFTCTRL through SM3_SHIFTCTRL), the system can also read the RX FIFO
registers with random access via RXF0_PUTGET0 through RXF0_PUTGET3 (where RXFx indicates which state machine’s FIFO is
being accessed). In this state, the FIFO register storage is repurposed as status registers, which the state machine can
update at any time and the system can read at any time. For example, a quadrature decoder program could maintain the
current step count in a status register at all times, rather than pushing to the RX FIFO and potentially blocking.
When both SHIFTCTRL_FJOIN_RX_PUT and SHIFTCTRL_FJOIN_RX_GET are set, the system can no longer access the RX FIFO
storage registers, but the state machine can now put/get the registers in arbitrary order, allowing them to be used as
additional scratch storage.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 69

NOTE
The RX FIFO storage registers have only a single read port and write port, and access through each port is assigned
to only one of (system, state machine) at any time.
3.4.10.3. Assembler Syntax
mov rxfifo[y], isr
mov rxfifo[<index>], isr
where:
y Is the literal token "y", indicating the RX FIFO entry is indexed by the Y register
<index> Is a value (see Section 3.3.3) specifying the RX FIFO entry to write (valid range 0-3)
3.4.11. MOV (from RX)
3.4.11.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MOV
1 0 0 Delay/side-set 1 0 0 1 IdxI Index
(_version 1 and above_)
3.4.11.2. Operation
Read the selected RX FIFO entry into the OSR. The PIO state machine can read the FIFO entries in any order, indexed
either by the Y register, or an immediate Index in the instruction. Requires the SHIFTCTRL_FJOIN_RX_GET configuration field
to be set, otherwise its operation is undefined.
If IdxI (index by immediate) is set, the RX FIFO’s registers are indexed by the two least-significant bits of the Index
operand. Otherwise, they are indexed by the two least-significant bits of the Y register. When IdxI is clear, all nonzero
values of Index are reserved encodings, and their operation is undefined.
When only SHIFTCTRL_FJOIN_RX_GET is set, the system can also write the RX FIFO registers with random access via
RXF0_PUTGET0 through RXF0_PUTGET3 (where RXFx indicates which state machine’s FIFO is being accessed). In this state, the
RX FIFO register storage is repurposed as additional configuration registers, which the system can update at any time
and the state machine can read at any time. For example, a UART TX program might use these registers to configure
the number of data bits, or the presence of an additional stop bit.
When both SHIFTCTRL_FJOIN_RX_PUT and SHIFTCTRL_FJOIN_RX_GET are set, the system can no longer access the RX FIFO
storage registers, but the state machine can now put/get the registers in arbitrary order, allowing them to be used as
additional scratch storage.
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 70

NOTE
The RX FIFO storage registers have only a single read port and write port, and access through each port is assigned
to only one of (system, state machine) at any time.
3.4.11.3. Assembler Syntax
mov osr, rxfifo[y]
mov osr, rxfifo[<index>]
where:
y Is the literal token "y", indicating the RX FIFO entry is indexed by the Y register
<index> Is a value (see Section 3.3.3) specifying the RX FIFO entry to read (valid range 0-3)
3.4.12. MOV
3.4.12.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
MOV
1 0 1 Delay/side-set Destination Op Source
3.4.12.2. Operation
Copy data from Source to Destination.
•
Destination:
◦
000: PINS (Uses same pin mapping as OUT)
◦
001: X (Scratch register X)
◦
010: Y (Scratch register Y)
◦
011: (_version 1 and above_) PINDIRS (Uses same pin mapping as OUT)
◦
100: EXEC (Execute data as instruction)
◦
101: PC
◦
110: ISR (Input shift counter is reset to 0 by this operation, i.e. empty)
◦
111: OSR (Output shift counter is reset to 0 by this operation, i.e. full)
•
Operation:
◦
00: None
◦
01: Invert (bitwise complement)
◦
10: Bit-reverse
◦
11: Reserved
•
Source:
◦
000: PINS (Uses same pin mapping as IN)
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 71

◦
001: X
◦
010: Y
◦
011: NULL
◦
100: Reserved
◦
101: STATUS
◦
110: ISR
◦
111: OSR
MOV PC causes an unconditional jump. MOV EXEC has the same behaviour as OUT EXEC (Section 3.4.7), and allows register
contents to be executed as an instruction. The MOV itself executes in 1 cycle, and the instruction in Source on the next
cycle. Delay cycles on MOV EXEC are ignored, but the executee may insert delay cycles as normal.
The STATUS source has a value of all-ones or all-zeroes, depending on some state machine status such as FIFO
full/empty, configured by EXECCTRL_STATUS_SEL.
MOV can manipulate the transferred data in limited ways, specified by the Operation argument. Invert sets each bit in
Destination to the logical NOT of the corresponding bit in Source, i.e. 1 bits become 0 bits, and vice versa. Bit reverse sets
each bit n in Destination to bit 31 - n in Source, assuming the bits are numbered 0 to 31.
MOV dst, PINS reads pins using the IN pin mapping, and writes the full 32-bit value to the destination without masking.
The LSB of the read value is the pin indicated by PINCTRL_IN_BASE, and each successive bit comes from a higher-
numbered pin, wrapping after 31.
3.4.12.3. Assembler Syntax
mov <destination>, ( op ) <source>
where:
<destination> Is one of the destinations specified above.
<op> If present, is:
! or ~ for NOT (Note: this is always a bitwise NOT)
:: for bit reverse
<source> Is one of the sources specified above.
3.4.13. IRQ
3.4.13.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
IRQ
1 1 0 Delay/side-set 0 Clr Wait IdxMode Index
3.4.13.2. Operation
Set or clear the IRQ flag selected by Index argument. * Clear: if 1, clear the flag selected by Index, instead of raising it. If
Clear is set, the Wait bit has no effect. * Wait: if 1, halt until the raised flag is lowered again, e.g. if a system interrupt
handler has acknowledged the flag. * Index: specifies an IRQ index from 0-7. This IRQ flag will be set/cleared depending
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 72

on the Clear bit. * IdxMode: modify the behaviour if the Index field, either modifying the index, or indexing IRQ flags from
a different PIO block: 00: the three LSBs are used directly to index the IRQ flags in this PIO block. 01 (_version 1 and
above_) (PREV): the instruction references an IRQ flag from the next-lower-numbered PIO in the system, wrapping to the
highest-numbered PIO if this is PIO0. 10 (REL): the state machine ID (0…3) is added to the IRQ flag index, by way of
modulo-4 addition on the two LSBs. For example, state machine 2 with a flag value of '0x11' will wait on flag 3, and a
flag value of '0x13' will wait on flag 1. This allows multiple state machines running the same program to synchronise
with each other. 11 (_version 1 and above_) (NEXT): the instruction references an IRQ flag from the next-higher-numbered
PIO in the system, wrapping to PIO0 if this is the highest-numbered PIO.
On PIO version 0, IRQ flags 4-7 are visible only to the state machines; IRQ flags 0-3 can be routed out to system level
interrupts, on either of the PIO’s two external interrupt request lines, configured by IRQ0_INTE and IRQ1_INTE. PIO version 1
lifts this limitation and allows all eight flags to assert system interrupts.
The modulo addition mode allows relative addressing of 'IRQ' and 'WAIT' instructions, for synchronising state machines
which are running the same program. Bit 2 (the third LSB) is unaffected by this addition.
The modulo addition mode (REL) allows relative addressing of 'IRQ' and 'WAIT' instructions, for synchronising state
machines which are running the same program. Bit 2 (the third LSB) is unaffected by this addition.
The NEXT/PREV modes (_version 1 and above_) can be used to synchronise between state machines in different PIO
blocks. If these state machines' clocks are divided, their clock dividers must be the same, and must have been
synchronised by writing CTRL.NEXTPREV_CLKDIV_RESTART in addition to the relevant NEXT_PIO_MASK/PREV_PIO_MASK bits.
Note that the cross-PIO connection is severed between PIOs with different accessibility to Non-secure code, as per
ACCESSCTRL.
If Wait is set, Delay cycles do not begin until after the wait period elapses.
3.4.13.3. Assembler Syntax
irq <irq_num> ( rel )
irq set <irq_num> ( rel )
irq nowait <irq_num> ( rel )
irq wait <irq_num> ( rel )
irq clear <irq_num> ( rel )
where:
<irq_num> ( rel ) Is a value (see Section 3.3.3) specifying The irq number to wait on (0-7). If rel is present, then the
actual irq number used is calculating by replacing the low two bits of the irq number (irq_num
10
)
with the low two bits of the sum (irq_num
10
+ sm_num
10
) where sm_num
10
is the state machine
number
irq Means set the IRQ without waiting
irq set Also means set the IRQ without waiting
irq nowait Again, means set the IRQ without waiting
irq wait Means set the IRQ and wait for it to be cleared before proceeding
irq clear Means clear the IRQ
3.4.14. SET
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 73

3.4.14.1. Encoding
Bit: 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
SET
1 1 1 Delay/side-set Destination Data
3.4.14.2. Operation
Write immediate value Data to Destination.
•
Destination:
◦
000: PINS
◦
001: X (scratch register X) 5 LSBs are set to Data, all others cleared to 0.
◦
010: Y (scratch register Y) 5 LSBs are set to Data, all others cleared to 0.
◦
011: Reserved
◦
100: PINDIRS
◦
101: Reserved
◦
110: Reserved
◦
111: Reserved
•
Data: 5-bit immediate value to drive to pins or register.
This can be used to assert control signals such as a clock or chip select, or to initialise loop counters. As Data is 5 bits in
size, scratch registers can be SET to values from 0-31, which is sufficient for a 32-iteration loop.
The mapping of SET and OUT onto pins is configured independently. They may be mapped to distinct locations, for
example if one pin is to be used as a clock signal, and another for data. They may also be overlapping ranges of pins: a
UART transmitter might use SET to assert start and stop bits, and OUT instructions to shift out FIFO data to the same pins.
3.4.14.3. Assembler Syntax
set <destination>, <value>
where:
<destination> Is one of the destinations specified above.
<value> The value (see Section 3.3.3) to set (valid range 0-31)
Raspberry Pi Pico-series C/C++ SDK
3.4. PIO Instruction Set Reference 74

Chapter 4. Library documentation
Full library API documentation can also be found online at https://www.raspberrypi.com/documentation/pico-sdk/
Figure 8. The
Raspberry Pi
documentation site.
NOTE
You can also build the API documentation locally, see Appendix B.
Raspberry Pi Pico-series C/C++ SDK
Chapter 4. Library documentation 75

4.1. Hardware APIs
This group of libraries provides a thin and efficient C API / abstractions to access the RP-series microcontroller
hardware without having to read and write hardware registers directly.
hardware_adc Analog to Digital Converter (ADC) API.
hardware_base Low-level types and (atomic) accessors for memory-mapped hardware registers.
hardware_claim Lightweight hardware resource management API.
hardware_clocks Clock Management API.
hardware_divider RP2040 Low Low-level hardware-divider API. Non-RP2040 platforms provide software
versions of all the functions.
hardware_dcp Assembly macros for the Double Coprocessor.
hardware_dma DMA Controller API.
ÊÊÊÊchannel_config DMA channel configuration .
hardware_exception Methods for setting processor exception handlers.
hardware_flash Low level flash programming and erase API.
hardware_gpio General Purpose Input/Output (GPIO) API.
hardware_hazard3 Accessors for Hazard3-specific RISC-V CSRs, and intrinsics for Hazard3 custom instructions.
hardware_i2c I2C Controller API.
hardware_interp Hardware Interpolator API.
ÊÊÊÊinterp_config Interpolator configuration .
hardware_irq Hardware interrupt handling API.
hardware_pio Programmable I/O (PIO) API.
ÊÊÊÊsm_config PIO state machine configuration .
ÊÊÊÊpio_instructions PIO instruction encoding .
hardware_pll Phase Locked Loop control APIs.
hardware_powman Power Management API.
hardware_pwm Hardware Pulse Width Modulation (PWM) API.
hardware_resets Hardware Reset API.
hardware_riscv Accessors for standard RISC-V hardware (mainly CSRs)
hardware_riscv_platfo
rm_timer
Accessors for standard RISC-V platform timer (mtime/mtimecmp), available on Raspberry Pi
microcontrollers with RISC-V processors.
hardware_rtc Hardware Real Time Clock API.
hardware_rcp Inline functions and assembly macros for the Redundancy Coprocessor.
hardware_spi Hardware SPI API.
hardware_sha256 Hardware SHA-256 Accelerator API.
hardware_sync Low level hardware spin locks, barrier and processor event APIs.
hardware_ticks Hardware Tick API.
hardware_timer Low-level hardware timer API.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 76

hardware_uart Hardware UART API.
hardware_vreg Voltage Regulation API.
hardware_watchdog Hardware Watchdog Timer API.
hardware_xosc Crystal Oscillator (XOSC) API.
4.1.1. hardware_adc
Analog to Digital Converter (ADC) API.
4.1.1.1. Detailed Description
RP-series microcontrollers have an internal analogue-digital converter (ADC) with the following features:
•
SAR ADC
•
500 kS/s (Using an independent 48MHz clock)
•
12 bit (RP2040 8.7 ENOB, RP2350 9.2 ENOB)
•
RP2040 5 input mux:
◦
4 inputs that are available on package pins shared with GPIO[29:26]
◦
1 input is dedicated to the internal temperature sensor
◦
4 element receive sample FIFO
•
RP2350 5 or 9 input mux:
◦
4 inputs available on QFN-60 package pins shared with GPIO[29:26]
◦
8 inputs available on QFN-80 package pins shared with GPIO[47:40]
◦
8 element receive sample FIFO
•
One input dedicated to the internal temperature sensor (see Section 12.4.6)
•
Interrupt generation
•
DMA interface
Although there is only one ADC you can specify the input to it using the adc_select_input() function. In round robin mode
(adc_set_round_robin()), the ADC will use that input and move to the next one after a read.
RP2040, RP2350 QFN-60: User ADC inputs are on 0-3 (GPIO 26-29), the temperature sensor is on input 4. RP2350 QFN-
80 : User ADC inputs are on 0-7 (GPIO 40-47), the temperature sensor is on input 8.
Temperature sensor values can be approximated in centigrade as:
T = 27 - (ADC_Voltage - 0.706)/0.001721
4.1.1.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/gpio.h"
Ê4 #include "hardware/adc.h"
Ê5
Ê6 int main() {
Ê7 stdio_init_all();
Ê8 printf("ADC Example, measuring GPIO26\n");
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 77

Ê9
10 adc_init();
11
12 // Make sure GPIO is high-impedance, no pullups etc
13 adc_gpio_init(26);
14 // Select ADC input 0 (GPIO26)
15 adc_select_input(0);
16
17 while (1) {
18 // 12-bit conversion, assume max value == ADC_VREF == 3.3 V
19 const float conversion_factor = 3.3f / (1 << 12);
20 uint16_t result = adc_read();
21 printf("Raw value: 0x%03x, voltage: %f V\n", result, result * conversion_factor);
22 sleep_ms(500);
23 }
24 }
4.1.1.2. Functions
void adc_init (void)
Initialise the ADC HW.
static void adc_gpio_init (uint gpio)
Initialise the gpio for use as an ADC pin.
static void adc_select_input (uint input)
ADC input select.
static uint adc_get_selected_input (void)
Get the currently selected ADC input channel.
static void adc_set_round_robin (uint input_mask)
Round Robin sampling selector.
static void adc_set_temp_sensor_enabled (bool enable)
Enable the onboard temperature sensor.
static uint16_t adc_read (void)
Perform a single conversion.
static void adc_run (bool run)
Enable or disable free-running sampling mode.
static void adc_set_clkdiv (float clkdiv)
Set the ADC Clock divisor.
static void adc_fifo_setup (bool en, bool dreq_en, uint16_t dreq_thresh, bool err_in_fifo, bool byte_shift)
Setup the ADC FIFO.
static bool adc_fifo_is_empty (void)
Check FIFO empty state.
static uint8_t adc_fifo_get_level (void)
Get number of entries in the ADC FIFO.
static uint16_t adc_fifo_get (void)
Get ADC result from FIFO.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 78

static uint16_t adc_fifo_get_blocking (void)
Wait for the ADC FIFO to have data.
static void adc_fifo_drain (void)
Drain the ADC FIFO.
static void adc_irq_set_enabled (bool enabled)
Enable/Disable ADC interrupts.
4.1.1.3. Function Documentation
4.1.1.3.1. adc_fifo_drain
static void adc_fifo_drain (void) [inline], [static]
Drain the ADC FIFO.
Will wait for any conversion to complete then drain the FIFO, discarding any results.
4.1.1.3.2. adc_fifo_get
static uint16_t adc_fifo_get (void) [inline], [static]
Get ADC result from FIFO.
Pops the latest result from the ADC FIFO.
4.1.1.3.3. adc_fifo_get_blocking
static uint16_t adc_fifo_get_blocking (void) [inline], [static]
Wait for the ADC FIFO to have data.
Blocks until data is present in the FIFO
4.1.1.3.4. adc_fifo_get_level
static uint8_t adc_fifo_get_level (void) [inline], [static]
Get number of entries in the ADC FIFO.
On RP2040 the FIFO is 4 samples long. On RP2350 the FIFO is 8 samples long.
This function will return how many samples are currently present.
4.1.1.3.5. adc_fifo_is_empty
static bool adc_fifo_is_empty (void) [inline], [static]
Check FIFO empty state.
Returns
Returns true if the FIFO is empty
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 79

4.1.1.3.6. adc_fifo_setup
static void adc_fifo_setup (bool en, bool dreq_en, uint16_t dreq_thresh, bool err_in_fifo, bool byte_shift) [inline],
[static]
Setup the ADC FIFO.
On RP2040 the FIFO is 4 samples long.
On RP2350 the FIFO is 8 samples long.
If a conversion is completed and the FIFO is full, the result is dropped.
Parameters
en
Enables write each conversion result to the FIFO
dreq_en
Enable DMA requests when FIFO contains data
dreq_thresh
Threshold for DMA requests/FIFO IRQ if enabled.
err_in_fifo
If enabled, bit 15 of the FIFO contains error flag for each sample
byte_shift
Shift FIFO contents to be one byte in size (for byte DMA) - enables DMA to byte buffers.
4.1.1.3.7. adc_get_selected_input
static uint adc_get_selected_input (void) [inline], [static]
Get the currently selected ADC input channel.
Returns
The currently selected input channel.
On RP02040 0…3 are GPIOs 26…29 respectively. Input 4 is the onboard temperature sensor.
On RP2350A 0…3 are GPIOs 26…29 respectively. Input 4 is the onboard temperature sensor. On RP2350B 0…7 are GPIOs
40…47 respectively. Input 8 is the onboard temperature sensor.
4.1.1.3.8. adc_gpio_init
static void adc_gpio_init (uint gpio) [inline], [static]
Initialise the gpio for use as an ADC pin.
Prepare a GPIO for use with ADC by disabling all digital functions.
Parameters
gpio
The GPIO number to use. Allowable GPIO numbers are 26 to 29 inclusive on RP2040 or RP2350A, 40-48
inclusive on RP2350B
4.1.1.3.9. adc_init
void adc_init (void)
Initialise the ADC HW.
4.1.1.3.10. adc_irq_set_enabled
static void adc_irq_set_enabled (bool enabled) [inline], [static]
Enable/Disable ADC interrupts.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 80

Parameters
enabled
Set to true to enable the ADC interrupts, false to disable
4.1.1.3.11. adc_read
static uint16_t adc_read (void) [inline], [static]
Perform a single conversion.
Performs an ADC conversion, waits for the result, and then returns it.
Returns
Result of the conversion.
4.1.1.3.12. adc_run
static void adc_run (bool run) [inline], [static]
Enable or disable free-running sampling mode.
Parameters
run
false to disable, true to enable free running conversion mode.
4.1.1.3.13. adc_select_input
static void adc_select_input (uint input) [inline], [static]
ADC input select.
Select an ADC input On RP02040 0…3 are GPIOs 26…29 respectively. Input 4 is the onboard temperature sensor. On
RP2350A 0…3 are GPIOs 26…29 respectively. Input 4 is the onboard temperature sensor. On RP2350B 0…7 are GPIOs
40…47 respectively. Input 8 is the onboard temperature sensor.
Parameters
input
Input to select.
4.1.1.3.14. adc_set_clkdiv
static void adc_set_clkdiv (float clkdiv) [inline], [static]
Set the ADC Clock divisor.
Period of samples will be (1 + div) cycles on average. Note it takes 96 cycles to perform a conversion, so any period less
than that will be clamped to 96.
Parameters
clkdiv
If non-zero, conversion will be started at intervals rather than back to back.
4.1.1.3.15. adc_set_round_robin
static void adc_set_round_robin (uint input_mask) [inline], [static]
Round Robin sampling selector.
This function sets which inputs are to be run through in round robin mode. RP2040, RP2350 QFN-60: Value between 0
and 0x1f (bit 0 to bit 4 for GPIO 26 to 29 and temperature sensor input respectively) RP2350 QFN-80: Value between 0
and 0xff (bit 0 to bit 7 for GPIO 40 to 47 and temperature sensor input respectively)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 81

Parameters
input_mask
A bit pattern indicating which of the 5/8 inputs are to be sampled. Write a value of 0 to disable
round robin sampling.
4.1.1.3.16. adc_set_temp_sensor_enabled
static void adc_set_temp_sensor_enabled (bool enable) [inline], [static]
Enable the onboard temperature sensor.
Parameters
enable
Set true to power on the onboard temperature sensor, false to power off.
4.1.2. hardware_base
Low-level types and (atomic) accessors for memory-mapped hardware registers.
4.1.2.1. Detailed Description
hardware_base defines the low level types and access functions for memory mapped hardware registers. It is included by
default by all other hardware libraries.
The following register access typedefs codify the access type (read/write) and the bus size (8/16/32) of the hardware
register. The register type names are formed by concatenating one from each of the 3 parts A, B, C
A B C Meaning
io_ A Memory mapped IO
register
Ê ro_ read-only access
Ê rw_ read-write access
Ê wo_ write-only access (can’t
actually be enforced via C
API)
Ê 8 8-bit wide access
Ê 16 16-bit wide access
Ê 32 32-bit wide access
When dealing with these types, you will always use a pointer, i.e. io_rw_32 *some_reg is a pointer to a read/write 32 bit
register that you can write with *some_reg = value, or read with value = *some_reg.
RP-series hardware is also aliased to provide atomic setting, clear or flipping of a subset of the bits within a hardware
register so that concurrent access by two cores is always consistent with one atomic operation being performed first,
followed by the second.
See hw_set_bits(), hw_clear_bits() and hw_xor_bits() provide for atomic access via a pointer to a 32 bit register
Additionally given a pointer to a structure representing a piece of hardware (e.g. dma_hw_t *dma_hw for the DMA controller),
you can get an alias to the entire structure such that writing any member (register) within the structure is equivalent to
an atomic operation via hw_set_alias(), hw_clear_alias() or hw_xor_alias()…
For example hw_set_alias(dma_hw)->inte1 = 0x80; will set bit 7 of the INTE1 register of the DMA controller, leaving the
other bits unchanged.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 82

4.1.2.2. Functions
static __force_inline void hw_set_bits (io_rw_32 *addr, uint32_t mask)
Atomically set the specified bits to 1 in a HW register.
static __force_inline void hw_clear_bits (io_rw_32 *addr, uint32_t mask)
Atomically clear the specified bits to 0 in a HW register.
static __force_inline void hw_xor_bits (io_rw_32 *addr, uint32_t mask)
Atomically flip the specified bits in a HW register.
static __force_inline void hw_write_masked (io_rw_32 *addr, uint32_t values, uint32_t write_mask)
Set new values for a sub-set of the bits in a HW register.
4.1.2.3. Function Documentation
4.1.2.3.1. hw_clear_bits
static __force_inline void hw_clear_bits (io_rw_32 * addr, uint32_t mask) [static]
Atomically clear the specified bits to 0 in a HW register.
Parameters
addr
Address of writable register
mask
Bit-mask specifying bits to clear
4.1.2.3.2. hw_set_bits
static __force_inline void hw_set_bits (io_rw_32 * addr, uint32_t mask) [static]
Atomically set the specified bits to 1 in a HW register.
Parameters
addr
Address of writable register
mask
Bit-mask specifying bits to set
4.1.2.3.3. hw_write_masked
static __force_inline void hw_write_masked (io_rw_32 * addr, uint32_t values, uint32_t write_mask) [static]
Set new values for a sub-set of the bits in a HW register.
Sets destination bits to values specified in values, if and only if corresponding bit in write_mask is set
Note: this method allows safe concurrent modification of different bits of a register, but multiple concurrent access to
the same bits is still unsafe.
Parameters
addr
Address of writable register
values
Bits values
write_mask
Mask of bits to change
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 83

4.1.2.3.4. hw_xor_bits
static __force_inline void hw_xor_bits (io_rw_32 * addr, uint32_t mask) [static]
Atomically flip the specified bits in a HW register.
Parameters
addr
Address of writable register
mask
Bit-mask specifying bits to invert
4.1.3. hardware_claim
Lightweight hardware resource management API.
4.1.3.1. Detailed Description
hardware_claim provides a simple API for management of hardware resources at runtime.
This API is usually called by other hardware specific claiming APIs and provides simple multi-core safe methods to
manipulate compact bit-sets representing hardware resources.
This API allows any other library to cooperatively participate in a scheme by which both compile time and runtime
allocation of resources can co-exist, and conflicts can be avoided or detected (depending on the use case) without the
libraries having any other knowledge of each other.
Facilities are providing for:
1. Claiming resources (and asserting if they are already claimed)
2. Freeing (unclaiming) resources
3. Finding unused resources
4.1.3.2. Functions
void hw_claim_or_assert (uint8_t *bits, uint bit_index, const char *message)
Atomically claim a resource, panicking if it is already in use.
int hw_claim_unused_from_range (uint8_t *bits, bool required, uint bit_lsb, uint bit_msb, const char *message)
Atomically claim one resource out of a range of resources, optionally asserting if none are free.
bool hw_is_claimed (const uint8_t *bits, uint bit_index)
Determine if a resource is claimed at the time of the call.
void hw_claim_clear (uint8_t *bits, uint bit_index)
Atomically unclaim a resource.
uint32_t hw_claim_lock (void)
Acquire the runtime mutual exclusion lock provided by the hardware_claim library.
void hw_claim_unlock (uint32_t token)
Release the runtime mutual exclusion lock provided by the hardware_claim library.
4.1.3.3. Function Documentation
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 84

4.1.3.3.1. hw_claim_clear
void hw_claim_clear (uint8_t * bits, uint bit_index)
Atomically unclaim a resource.
The resource ownership is indicated by the bit_index bit in an array of bits.
Parameters
bits
pointer to an array of bits (8 bits per byte)
bit_index
resource to unclaim (bit index into array of bits)
4.1.3.3.2. hw_claim_lock
uint32_t hw_claim_lock (void)
Acquire the runtime mutual exclusion lock provided by the hardware_claim library.
This method is called automatically by the other hw_claim_ methods, however it is provided as a convenience to code
that might want to protect other hardware initialization code from concurrent use.
NOTE
hw_claim_lock() uses a spin lock internally, so disables interrupts on the calling core, and will deadlock if the calling
core already owns the lock.
Returns
a token to pass to hw_claim_unlock()
4.1.3.3.3. hw_claim_or_assert
void hw_claim_or_assert (uint8_t * bits, uint bit_index, const char * message)
Atomically claim a resource, panicking if it is already in use.
The resource ownership is indicated by the bit_index bit in an array of bits.
Parameters
bits
pointer to an array of bits (8 bits per byte)
bit_index
resource to claim (bit index into array of bits)
message
string to display if the bit cannot be claimed; note this may have a single printf format "%d" for the
bit
4.1.3.3.4. hw_claim_unlock
void hw_claim_unlock (uint32_t token)
Release the runtime mutual exclusion lock provided by the hardware_claim library.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 85

NOTE
This method MUST be called from the same core that call hw_claim_lock()
Parameters
token
the token returned by the corresponding call to hw_claim_lock()
4.1.3.3.5. hw_claim_unused_from_range
int hw_claim_unused_from_range (uint8_t * bits, bool required, uint bit_lsb, uint bit_msb, const char * message)
Atomically claim one resource out of a range of resources, optionally asserting if none are free.
Parameters
bits
pointer to an array of bits (8 bits per byte)
required
true if this method should panic if the resource is not free
bit_lsb
the lower bound (inclusive) of the resource range to claim from
bit_msb
the upper bound (inclusive) of the resource range to claim from
message
string to display if the bit cannot be claimed
Returns
the bit index representing the claimed or -1 if none are available in the range, and required = false
4.1.3.3.6. hw_is_claimed
bool hw_is_claimed (const uint8_t * bits, uint bit_index) [inline]
Determine if a resource is claimed at the time of the call.
The resource ownership is indicated by the bit_index bit in an array of bits.
Parameters
bits
pointer to an array of bits (8 bits per byte)
bit_index
resource to check (bit index into array of bits)
Returns
true if the resource is claimed
4.1.4. hardware_clocks
Clock Management API.
4.1.4.1. Detailed Description
This API provides a high level interface to the clock functions.
The clocks block provides independent clocks to on-chip and external components. It takes inputs from a variety of
clock sources allowing the user to trade off performance against cost, board area and power consumption. From these
sources it uses multiple clock generators to provide the required clocks. This architecture allows the user flexibility to
start and stop clocks independently and to vary some clock frequencies whilst maintaining others at their optimum
frequencies
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 86

Please refer to the appropriate datasheet for more details on the RP-series clocks.
The clock source depends on which clock you are attempting to configure. The first table below shows main clock
sources. If you are not setting the Reference clock or the System clock, or you are specifying that one of those two will
be using an auxiliary clock source, then you will need to use one of the entries from the subsequent tables.
•
On RP2040 the clock sources are:
Main Clock Sources
Source Reference Clock System Clock
ROSC CLOCKS_CLK_REF_CTRL_SRC_VALUE
_ROSC_CLKSRC_PH
Auxiliary CLOCKS_CLK_REF_CTRL_SRC_VALUE
_CLKSRC_CLK_REF_AUX
CLOCKS_CLK_SYS_CTRL_SRC_VALUE
_CLKSRC_CLK_SYS_AUX
XOSC CLOCKS_CLK_REF_CTRL_SRC_VALUE
_XOSC_CLKSRC
Reference CLOCKS_CLK_SYS_CTRL_SRC_VALUE
_CLK_REF
Auxiliary Clock Sources
The auxiliary clock sources available for use in the configure function depend on which clock is being configured. The
following table describes the available values that can be used. Note that for clk_gpout[x], x can be 0-3.
Aux Source clk_gpout[x] clk_ref clk_sys
System PLL CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_PLL_SYS
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_SYS
GPIO in 0 CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_GPIN0
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
GPIO in 1 CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_GPIN1
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
USB PLL CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_PLL_USB
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
ROSC CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_ROSC_C
LKSRC
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_ROSC_CLKS
RC
XOSC CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_XOSC_C
LKSRC
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_XOSC_CLKS
RC
System clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_SY
S
USB Clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_US
B
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 87

Aux Source clk_gpout[x] clk_ref clk_sys
ADC clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_AD
C
RTC Clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_RT
C
Ref clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_RE
F
Aux Source clk_peri clk_usb clk_adc
System PLL CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_SYS
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_SYS
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_SYS
GPIO in 0 CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
GPIO in 1 CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
USB PLL CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
ROSC CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_ROSC_CLKS
RC_PH
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_ROSC_CLKS
RC_PH
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_ROSC_CLKS
RC_PH
XOSC CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_XOSC_CLKS
RC
CLOCKS_CLK_USB_CTRL_A
UXSRC_VALUE_XOSC_CLKS
RC
CLOCKS_CLK_ADC_CTRL_A
UXSRC_VALUE_XOSC_CLKS
RC
System clock CLOCKS_CLK_PERI_CTRL_A
UXSRC_VALUE_CLK_SYS
Aux Source clk_rtc
System PLL CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_CLKSRC_PLL_
SYS
GPIO in 0 CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_CLKSRC_GPIN
0
GPIO in 1 CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_CLKSRC_GPIN
1
USB PLL CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_CLKSRC_PLL_
USB
ROSC CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_ROSC_CLKSR
C_PH
XOSC CLOCKS_CLK_RTC_CTRL_AUXSRC_VALUE_XOSC_CLKSR
C
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 88

On RP2350 the clock sources are:
•
Main Clock Sources
Source Reference Clock System Clock
ROSC CLOCKS_CLK_REF_CTRL_SRC_VALUE
_ROSC_CLKSRC_PH
Auxiliary CLOCKS_CLK_REF_CTRL_SRC_VALUE
_CLKSRC_CLK_REF_AUX
CLOCKS_CLK_SYS_CTRL_SRC_VALUE
_CLKSRC_CLK_SYS_AUX
XOSC CLOCKS_CLK_REF_CTRL_SRC_VALUE
_XOSC_CLKSRC
LPOSC CLOCKS_CLK_REF_CTRL_SRC_VALUE
_LPOSC_CLKSRC
Reference CLOCKS_CLK_SYS_CTRL_SRC_VALUE
_CLK_REF
Auxiliary Clock Sources
The auxiliary clock sources available for use in the configure function depend on which clock is being configured. The
following table describes the available values that can be used. Note that for clk_gpout[x], x can be 0-3.
Aux Source clk_gpout[x] clk_ref clk_sys
System PLL CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_PLL_SYS
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_SYS
GPIO in 0 CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_GPIN0
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN0
GPIO in 1 CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_GPIN1
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_GP
IN1
USB PLL CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLKSRC
_PLL_USB
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_CLKSRC_PL
L_USB
ROSC CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_ROSC_C
LKSRC
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_ROSC_CLKS
RC
XOSC CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_XOSC_C
LKSRC
CLOCKS_CLK_SYS_CTRL_A
UXSRC_VALUE_XOSC_CLKS
RC
LPOSC CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_LPOSC_
CLKSRC
CLOCKS_CLK_REF_CTRL_A
UXSRC_VALUE_LPOSC_CLK
SRC
System clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_SY
S
USB Clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_US
B
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 89

Aux Source clk_gpout[x] clk_ref clk_sys
ADC clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_AD
C
REF clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_RE
F
PERI clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_PE
RI
HSTX clock CLOCKS_CLK_GPOUTx_CTR
L_AUXSRC_VALUE_CLK_PE
RI
Aux Source clk_peri clk_hstx clk_usb clk_adc
System PLL CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_SYS
CLOCKS_CLK_HSTX_
CTRL_AUXSRC_VALU
E_CLKSRC_PLL_SYS
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_SYS
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_SYS
GPIO in 0 CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN0
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN0
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN0
GPIO in 1 CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN1
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN1
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
CLKSRC_GPIN1
USB PLL CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_USB
CLOCKS_CLK_HSTX_
CTRL_AUXSRC_VALU
E_CLKSRC_PLL_USB
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_USB
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
CLKSRC_PLL_USB
ROSC CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
ROSC_CLKSRC_PH
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
ROSC_CLKSRC_PH
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
ROSC_CLKSRC_PH
XOSC CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
XOSC_CLKSRC
CLOCKS_CLK_USB_C
TRL_AUXSRC_VALUE_
XOSC_CLKSRC
CLOCKS_CLK_ADC_C
TRL_AUXSRC_VALUE_
XOSC_CLKSRC
System clock CLOCKS_CLK_PERI_C
TRL_AUXSRC_VALUE_
CLK_SYS
CLOCKS_CLK_HSTX_
CTRL_AUXSRC_VALU
E_CLK_SYS
4.1.4.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/pll.h"
Ê4 #include "hardware/clocks.h"
Ê5 #include "hardware/structs/pll.h"
Ê6 #include "hardware/structs/clocks.h"
Ê7
Ê8 void measure_freqs(void) {
Ê9 uint f_pll_sys = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_PLL_SYS_CLKSRC_PRIMARY);
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 90

10 uint f_pll_usb = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_PLL_USB_CLKSRC_PRIMARY);
11 uint f_rosc = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_ROSC_CLKSRC);
12 uint f_clk_sys = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_CLK_SYS);
13 uint f_clk_peri = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_CLK_PERI);
14 uint f_clk_usb = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_CLK_USB);
15 uint f_clk_adc = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_CLK_ADC);
16 #ifdef CLOCKS_FC0_SRC_VALUE_CLK_RTC
17 uint f_clk_rtc = frequency_count_khz(CLOCKS_FC0_SRC_VALUE_CLK_RTC);
18 #endif
19
20 printf("pll_sys = %dkHz\n", f_pll_sys);
21 printf("pll_usb = %dkHz\n", f_pll_usb);
22 printf("rosc = %dkHz\n", f_rosc);
23 printf("clk_sys = %dkHz\n", f_clk_sys);
24 printf("clk_peri = %dkHz\n", f_clk_peri);
25 printf("clk_usb = %dkHz\n", f_clk_usb);
26 printf("clk_adc = %dkHz\n", f_clk_adc);
27 #ifdef CLOCKS_FC0_SRC_VALUE_CLK_RTC
28 printf("clk_rtc = %dkHz\n", f_clk_rtc);
29 #endif
30
31 // Can't measure clk_ref / xosc as it is the ref
32 }
33
34 int main() {
35 stdio_init_all();
36
37 printf("Hello, world!\n");
38
39 measure_freqs();
40
41 // Change clk_sys to be 48MHz. The simplest way is to take this from PLL_USB
42 // which has a source frequency of 48MHz
43 clock_configure(clk_sys,
44 CLOCKS_CLK_SYS_CTRL_SRC_VALUE_CLKSRC_CLK_SYS_AUX,
45 CLOCKS_CLK_SYS_CTRL_AUXSRC_VALUE_CLKSRC_PLL_USB,
46 48 * MHZ,
47 48 * MHZ);
48
49 // Turn off PLL sys for good measure
50 pll_deinit(pll_sys);
51
52 // CLK peri is clocked from clk_sys so need to change clk_peri's freq
53 clock_configure(clk_peri,
54 0,
55 CLOCKS_CLK_PERI_CTRL_AUXSRC_VALUE_CLK_SYS,
56 48 * MHZ,
57 48 * MHZ);
58
59 // Re init uart now that clk_peri has changed
60 stdio_init_all();
61
62 measure_freqs();
63 printf("Hello, 48MHz");
64
65 return 0;
66 }
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 91

4.1.4.2. Typedefs
typedef enum clock_num_rp2040 clock_num_t
Clock numbers on RP2040 (used as typedef clock_num_t)
typedef enum clock_dest_num_rp2040 clock_dest_num_t
Clock destination numbers on RP2040 (used as typedef clock_dest_num_t)
typedef enum clock_num_rp2350 clock_num_t
Clock numbers on RP2350 (used as typedef clock_num_t)
typedef enum clock_dest_num_rp2350 clock_dest_num_t
Clock destination numbers on RP2350 (used as typedef clock_dest_num_t)
typedef void(* resus_callback_t)(void)
Resus callback function type.
4.1.4.3. Enumerations
enum clock_num_rp2040 { clk_gpout0 = 0, clk_gpout1 = 1, clk_gpout2 = 2, clk_gpout3 = 3, clk_ref = 4, clk_sys = 5,
clk_peri = 6, clk_usb = 7, clk_adc = 8, clk_rtc = 9, CLK_COUNT }
Clock numbers on RP2040 (used as typedef clock_num_t)
enum clock_dest_num_rp2040 { CLK_DEST_SYS_CLOCKS = 0, CLK_DEST_ADC_ADC = 1, CLK_DEST_SYS_ADC = 2, CLK_DEST_SYS_BUSCTRL =
3, CLK_DEST_SYS_BUSFABRIC = 4, CLK_DEST_SYS_DMA = 5, CLK_DEST_SYS_I2C0 = 6, CLK_DEST_SYS_I2C1 = 7, CLK_DEST_SYS_IO = 8,
CLK_DEST_SYS_JTAG = 9, CLK_DEST_SYS_VREG_AND_CHIP_RESET = 10, CLK_DEST_SYS_PADS = 11, CLK_DEST_SYS_PIO0 = 12,
CLK_DEST_SYS_PIO1 = 13, CLK_DEST_SYS_PLL_SYS = 14, CLK_DEST_SYS_PLL_USB = 15, CLK_DEST_SYS_PSM = 16, CLK_DEST_SYS_PWM =
17, CLK_DEST_SYS_RESETS = 18, CLK_DEST_SYS_ROM = 19, CLK_DEST_SYS_ROSC = 20, CLK_DEST_RTC_RTC = 21, CLK_DEST_SYS_RTC =
22, CLK_DEST_SYS_SIO = 23, CLK_DEST_PERI_SPI0 = 24, CLK_DEST_SYS_SPI0 = 25, CLK_DEST_PERI_SPI1 = 26, CLK_DEST_SYS_SPI1 =
27, CLK_DEST_SYS_SRAM0 = 28, CLK_DEST_SYS_SRAM1 = 29, CLK_DEST_SYS_SRAM2 = 30, CLK_DEST_SYS_SRAM3 = 31,
CLK_DEST_SYS_SRAM4 = 32, CLK_DEST_SYS_SRAM5 = 33, CLK_DEST_SYS_SYSCFG = 34, CLK_DEST_SYS_SYSINFO = 35, CLK_DEST_SYS_TBMAN
= 36, CLK_DEST_SYS_TIMER = 37, CLK_DEST_PERI_UART0 = 38, CLK_DEST_SYS_UART0 = 39, CLK_DEST_PERI_UART1 = 40,
CLK_DEST_SYS_UART1 = 41, CLK_DEST_SYS_USBCTRL = 42, CLK_DEST_USB_USBCTRL = 43, CLK_DEST_SYS_WATCHDOG = 44,
CLK_DEST_SYS_XIP = 45, CLK_DEST_SYS_XOSC = 46, NUM_CLOCK_DESTINATIONS }
Clock destination numbers on RP2040 (used as typedef clock_dest_num_t)
enum clock_num_rp2350 { clk_gpout0 = 0, clk_gpout1 = 1, clk_gpout2 = 2, clk_gpout3 = 3, clk_ref = 4, clk_sys = 5,
clk_peri = 6, clk_hstx = 7, clk_usb = 8, clk_adc = 9, CLK_COUNT }
Clock numbers on RP2350 (used as typedef clock_num_t)
enum clock_dest_num_rp2350 { CLK_DEST_SYS_CLOCKS = 0, CLK_DEST_SYS_ACCESSCTRL = 1, CLK_DEST_ADC = 2, CLK_DEST_SYS_ADC =
3, CLK_DEST_SYS_BOOTRAM = 4, CLK_DEST_SYS_BUSCTRL = 5, CLK_DEST_SYS_BUSFABRIC = 6, CLK_DEST_SYS_DMA = 7,
CLK_DEST_SYS_GLITCH_DETECTOR = 8, CLK_DEST_HSTX = 9, CLK_DEST_SYS_HSTX = 10, CLK_DEST_SYS_I2C0 = 11, CLK_DEST_SYS_I2C1 =
12, CLK_DEST_SYS_IO = 13, CLK_DEST_SYS_JTAG = 14, CLK_DEST_REF_OTP = 15, CLK_DEST_SYS_OTP = 16, CLK_DEST_SYS_PADS = 17,
CLK_DEST_SYS_PIO0 = 18, CLK_DEST_SYS_PIO1 = 19, CLK_DEST_SYS_PIO2 = 20, CLK_DEST_SYS_PLL_SYS = 21, CLK_DEST_SYS_PLL_USB =
22, CLK_DEST_REF_POWMAN = 23, CLK_DEST_SYS_POWMAN = 24, CLK_DEST_SYS_PWM = 25, CLK_DEST_SYS_RESETS = 26, CLK_DEST_SYS_ROM
= 27, CLK_DEST_SYS_ROSC = 28, CLK_DEST_SYS_PSM = 29, CLK_DEST_SYS_SHA256 = 30, CLK_DEST_SYS_SIO = 31, CLK_DEST_PERI_SPI0
= 32, CLK_DEST_SYS_SPI0 = 33, CLK_DEST_PERI_SPI1 = 34, CLK_DEST_SYS_SPI1 = 35, CLK_DEST_SYS_SRAM0 = 36,
CLK_DEST_SYS_SRAM1 = 37, CLK_DEST_SYS_SRAM2 = 38, CLK_DEST_SYS_SRAM3 = 39, CLK_DEST_SYS_SRAM4 = 40, CLK_DEST_SYS_SRAM5 =
41, CLK_DEST_SYS_SRAM6 = 42, CLK_DEST_SYS_SRAM7 = 43, CLK_DEST_SYS_SRAM8 = 44, CLK_DEST_SYS_SRAM9 = 45,
CLK_DEST_SYS_SYSCFG = 46, CLK_DEST_SYS_SYSINFO = 47, CLK_DEST_SYS_TBMAN = 48, CLK_DEST_REF_TICKS = 49, CLK_DEST_SYS_TICKS
= 50, CLK_DEST_SYS_TIMER0 = 51, CLK_DEST_SYS_TIMER1 = 52, CLK_DEST_SYS_TRNG = 53, CLK_DEST_PERI_UART0 = 54,
CLK_DEST_SYS_UART0 = 55, CLK_DEST_PERI_UART1 = 56, CLK_DEST_SYS_UART1 = 57, CLK_DEST_SYS_USBCTRL = 58, CLK_DEST_USB = 59,
CLK_DEST_SYS_WATCHDOG = 60, CLK_DEST_SYS_XIP = 61, CLK_DEST_SYS_XOSC = 62, NUM_CLOCK_DESTINATIONS }
Clock destination numbers on RP2350 (used as typedef clock_dest_num_t)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 92

4.1.4.4. Functions
bool clock_configure (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq, uint32_t freq)
Configure the specified clock.
void clock_configure_undivided (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq)
Configure the specified clock to use the undividded input source.
void clock_configure_int_divider (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq, uint32_t
int_divider)
Configure the specified clock to use the undividded input source.
void clock_stop (clock_handle_t clock)
Stop the specified clock.
uint32_t clock_get_hz (clock_handle_t clock)
Get the current frequency of the specified clock.
uint32_t frequency_count_khz (uint src)
Measure a clocks frequency using the Frequency counter.
void clock_set_reported_hz (clock_handle_t clock, uint hz)
Set the "current frequency" of the clock as reported by clock_get_hz without actually changing the clock.
void clocks_enable_resus (resus_callback_t resus_callback)
Enable the resus function. Restarts clk_sys if it is accidentally stopped.
void clock_gpio_init_int_frac (uint gpio, uint src, uint32_t div_int, uint8_t div_frac)
Output an optionally divided clock to the specified gpio pin.
static void clock_gpio_init (uint gpio, uint src, float div)
Output an optionally divided clock to the specified gpio pin.
bool clock_configure_gpin (clock_handle_t clock, uint gpio, uint32_t src_freq, uint32_t freq)
Configure a clock to come from a gpio input.
4.1.4.5. Typedef Documentation
4.1.4.5.1. clock_num_t
typedef enum clock_num_rp2040 clock_num_t
Clock numbers on RP2040 (used as typedef clock_num_t)
4.1.4.5.2. clock_dest_num_t
typedef enum clock_dest_num_rp2040 clock_dest_num_t
Clock destination numbers on RP2040 (used as typedef clock_dest_num_t)
4.1.4.5.3. clock_num_t
typedef enum clock_num_rp2350 clock_num_t
Clock numbers on RP2350 (used as typedef clock_num_t)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 93

4.1.4.5.4. clock_dest_num_t
typedef enum clock_dest_num_rp2350 clock_dest_num_t
Clock destination numbers on RP2350 (used as typedef clock_dest_num_t)
4.1.4.5.5. resus_callback_t
typedef void(* resus_callback_t) (void)
Resus callback function type.
User provided callback for a resus event (when clk_sys is stopped by the programmer and is restarted for them).
4.1.4.6. Enumeration Type Documentation
4.1.4.6.1. clock_num_rp2040
enum clock_num_rp2040
Clock numbers on RP2040 (used as typedef clock_num_t)
Table 9. Enumerator
clk_gpout0
Select CLK_GPOUT0 as clock source.
clk_gpout1
Select CLK_GPOUT1 as clock source.
clk_gpout2
Select CLK_GPOUT2 as clock source.
clk_gpout3
Select CLK_GPOUT3 as clock source.
clk_ref
Select CLK_REF as clock source.
clk_sys
Select CLK_SYS as clock source.
clk_peri
Select CLK_PERI as clock source.
clk_usb
Select CLK_USB as clock source.
clk_adc
Select CLK_ADC as clock source.
clk_rtc
Select CLK_RTC as clock source.
4.1.4.6.2. clock_dest_num_rp2040
enum clock_dest_num_rp2040
Clock destination numbers on RP2040 (used as typedef clock_dest_num_t)
Table 10. Enumerator
CLK_DEST_SYS_CLOCKS
Select SYS_CLOCKS as clock destination.
CLK_DEST_ADC_ADC
Select ADC_ADC as clock destination.
CLK_DEST_SYS_ADC
Select SYS_ADC as clock destination.
CLK_DEST_SYS_BUSCTRL
Select SYS_BUSCTRL as clock destination.
CLK_DEST_SYS_BUSFABRIC
Select SYS_BUSFABRIC as clock destination.
CLK_DEST_SYS_DMA
Select SYS_DMA as clock destination.
CLK_DEST_SYS_I2C0
Select SYS_I2C0 as clock destination.
CLK_DEST_SYS_I2C1
Select SYS_I2C1 as clock destination.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 94

CLK_DEST_SYS_IO
Select SYS_IO as clock destination.
CLK_DEST_SYS_JTAG
Select SYS_JTAG as clock destination.
CLK_DEST_SYS_VREG_AND_CHIP_RESET
Select SYS_VREG_AND_CHIP_RESET as clock destination.
CLK_DEST_SYS_PADS
Select SYS_PADS as clock destination.
CLK_DEST_SYS_PIO0
Select SYS_PIO0 as clock destination.
CLK_DEST_SYS_PIO1
Select SYS_PIO1 as clock destination.
CLK_DEST_SYS_PLL_SYS
Select SYS_PLL_SYS as clock destination.
CLK_DEST_SYS_PLL_USB
Select SYS_PLL_USB as clock destination.
CLK_DEST_SYS_PSM
Select SYS_PSM as clock destination.
CLK_DEST_SYS_PWM
Select SYS_PWM as clock destination.
CLK_DEST_SYS_RESETS
Select SYS_RESETS as clock destination.
CLK_DEST_SYS_ROM
Select SYS_ROM as clock destination.
CLK_DEST_SYS_ROSC
Select SYS_ROSC as clock destination.
CLK_DEST_RTC_RTC
Select RTC_RTC as clock destination.
CLK_DEST_SYS_RTC
Select SYS_RTC as clock destination.
CLK_DEST_SYS_SIO
Select SYS_SIO as clock destination.
CLK_DEST_PERI_SPI0
Select PERI_SPI0 as clock destination.
CLK_DEST_SYS_SPI0
Select SYS_SPI0 as clock destination.
CLK_DEST_PERI_SPI1
Select PERI_SPI1 as clock destination.
CLK_DEST_SYS_SPI1
Select SYS_SPI1 as clock destination.
CLK_DEST_SYS_SRAM0
Select SYS_SRAM0 as clock destination.
CLK_DEST_SYS_SRAM1
Select SYS_SRAM1 as clock destination.
CLK_DEST_SYS_SRAM2
Select SYS_SRAM2 as clock destination.
CLK_DEST_SYS_SRAM3
Select SYS_SRAM3 as clock destination.
CLK_DEST_SYS_SRAM4
Select SYS_SRAM4 as clock destination.
CLK_DEST_SYS_SRAM5
Select SYS_SRAM5 as clock destination.
CLK_DEST_SYS_SYSCFG
Select SYS_SYSCFG as clock destination.
CLK_DEST_SYS_SYSINFO
Select SYS_SYSINFO as clock destination.
CLK_DEST_SYS_TBMAN
Select SYS_TBMAN as clock destination.
CLK_DEST_SYS_TIMER
Select SYS_TIMER as clock destination.
CLK_DEST_PERI_UART0
Select PERI_UART0 as clock destination.
CLK_DEST_SYS_UART0
Select SYS_UART0 as clock destination.
CLK_DEST_PERI_UART1
Select PERI_UART1 as clock destination.
CLK_DEST_SYS_UART1
Select SYS_UART1 as clock destination.
CLK_DEST_SYS_USBCTRL
Select SYS_USBCTRL as clock destination.
CLK_DEST_USB_USBCTRL
Select USB_USBCTRL as clock destination.
CLK_DEST_SYS_WATCHDOG
Select SYS_WATCHDOG as clock destination.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 95

CLK_DEST_SYS_XIP
Select SYS_XIP as clock destination.
CLK_DEST_SYS_XOSC
Select SYS_XOSC as clock destination.
4.1.4.6.3. clock_num_rp2350
enum clock_num_rp2350
Clock numbers on RP2350 (used as typedef clock_num_t)
Table 11. Enumerator
clk_gpout0
Select CLK_GPOUT0 as clock source.
clk_gpout1
Select CLK_GPOUT1 as clock source.
clk_gpout2
Select CLK_GPOUT2 as clock source.
clk_gpout3
Select CLK_GPOUT3 as clock source.
clk_ref
Select CLK_REF as clock source.
clk_sys
Select CLK_SYS as clock source.
clk_peri
Select CLK_PERI as clock source.
clk_hstx
Select CLK_HSTX as clock source.
clk_usb
Select CLK_USB as clock source.
clk_adc
Select CLK_ADC as clock source.
4.1.4.6.4. clock_dest_num_rp2350
enum clock_dest_num_rp2350
Clock destination numbers on RP2350 (used as typedef clock_dest_num_t)
Table 12. Enumerator
CLK_DEST_SYS_CLOCKS
Select SYS_CLOCKS as clock destination.
CLK_DEST_SYS_ACCESSCTRL
Select SYS_ACCESSCTRL as clock destination.
CLK_DEST_ADC
Select ADC as clock destination.
CLK_DEST_SYS_ADC
Select SYS_ADC as clock destination.
CLK_DEST_SYS_BOOTRAM
Select SYS_BOOTRAM as clock destination.
CLK_DEST_SYS_BUSCTRL
Select SYS_BUSCTRL as clock destination.
CLK_DEST_SYS_BUSFABRIC
Select SYS_BUSFABRIC as clock destination.
CLK_DEST_SYS_DMA
Select SYS_DMA as clock destination.
CLK_DEST_SYS_GLITCH_DETECTOR
Select SYS_GLITCH_DETECTOR as clock destination.
CLK_DEST_HSTX
Select HSTX as clock destination.
CLK_DEST_SYS_HSTX
Select SYS_HSTX as clock destination.
CLK_DEST_SYS_I2C0
Select SYS_I2C0 as clock destination.
CLK_DEST_SYS_I2C1
Select SYS_I2C1 as clock destination.
CLK_DEST_SYS_IO
Select SYS_IO as clock destination.
CLK_DEST_SYS_JTAG
Select SYS_JTAG as clock destination.
CLK_DEST_REF_OTP
Select REF_OTP as clock destination.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 96

CLK_DEST_SYS_OTP
Select SYS_OTP as clock destination.
CLK_DEST_SYS_PADS
Select SYS_PADS as clock destination.
CLK_DEST_SYS_PIO0
Select SYS_PIO0 as clock destination.
CLK_DEST_SYS_PIO1
Select SYS_PIO1 as clock destination.
CLK_DEST_SYS_PIO2
Select SYS_PIO2 as clock destination.
CLK_DEST_SYS_PLL_SYS
Select SYS_PLL_SYS as clock destination.
CLK_DEST_SYS_PLL_USB
Select SYS_PLL_USB as clock destination.
CLK_DEST_REF_POWMAN
Select REF_POWMAN as clock destination.
CLK_DEST_SYS_POWMAN
Select SYS_POWMAN as clock destination.
CLK_DEST_SYS_PWM
Select SYS_PWM as clock destination.
CLK_DEST_SYS_RESETS
Select SYS_RESETS as clock destination.
CLK_DEST_SYS_ROM
Select SYS_ROM as clock destination.
CLK_DEST_SYS_ROSC
Select SYS_ROSC as clock destination.
CLK_DEST_SYS_PSM
Select SYS_PSM as clock destination.
CLK_DEST_SYS_SHA256
Select SYS_SHA256 as clock destination.
CLK_DEST_SYS_SIO
Select SYS_SIO as clock destination.
CLK_DEST_PERI_SPI0
Select PERI_SPI0 as clock destination.
CLK_DEST_SYS_SPI0
Select SYS_SPI0 as clock destination.
CLK_DEST_PERI_SPI1
Select PERI_SPI1 as clock destination.
CLK_DEST_SYS_SPI1
Select SYS_SPI1 as clock destination.
CLK_DEST_SYS_SRAM0
Select SYS_SRAM0 as clock destination.
CLK_DEST_SYS_SRAM1
Select SYS_SRAM1 as clock destination.
CLK_DEST_SYS_SRAM2
Select SYS_SRAM2 as clock destination.
CLK_DEST_SYS_SRAM3
Select SYS_SRAM3 as clock destination.
CLK_DEST_SYS_SRAM4
Select SYS_SRAM4 as clock destination.
CLK_DEST_SYS_SRAM5
Select SYS_SRAM5 as clock destination.
CLK_DEST_SYS_SRAM6
Select SYS_SRAM6 as clock destination.
CLK_DEST_SYS_SRAM7
Select SYS_SRAM7 as clock destination.
CLK_DEST_SYS_SRAM8
Select SYS_SRAM8 as clock destination.
CLK_DEST_SYS_SRAM9
Select SYS_SRAM9 as clock destination.
CLK_DEST_SYS_SYSCFG
Select SYS_SYSCFG as clock destination.
CLK_DEST_SYS_SYSINFO
Select SYS_SYSINFO as clock destination.
CLK_DEST_SYS_TBMAN
Select SYS_TBMAN as clock destination.
CLK_DEST_REF_TICKS
Select REF_TICKS as clock destination.
CLK_DEST_SYS_TICKS
Select SYS_TICKS as clock destination.
CLK_DEST_SYS_TIMER0
Select SYS_TIMER0 as clock destination.
CLK_DEST_SYS_TIMER1
Select SYS_TIMER1 as clock destination.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 97

CLK_DEST_SYS_TRNG
Select SYS_TRNG as clock destination.
CLK_DEST_PERI_UART0
Select PERI_UART0 as clock destination.
CLK_DEST_SYS_UART0
Select SYS_UART0 as clock destination.
CLK_DEST_PERI_UART1
Select PERI_UART1 as clock destination.
CLK_DEST_SYS_UART1
Select SYS_UART1 as clock destination.
CLK_DEST_SYS_USBCTRL
Select SYS_USBCTRL as clock destination.
CLK_DEST_USB
Select USB as clock destination.
CLK_DEST_SYS_WATCHDOG
Select SYS_WATCHDOG as clock destination.
CLK_DEST_SYS_XIP
Select SYS_XIP as clock destination.
CLK_DEST_SYS_XOSC
Select SYS_XOSC as clock destination.
4.1.4.7. Function Documentation
4.1.4.7.1. clock_configure
bool clock_configure (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq, uint32_t freq)
Configure the specified clock.
See the tables in the description for details on the possible values for clock sources.
Parameters
clock
The clock to configure
src
The main clock source, can be 0.
auxsrc
The auxiliary clock source, which depends on which clock is being set. Can be 0
src_freq
Frequency of the input clock source
freq
Requested frequency
4.1.4.7.2. clock_configure_gpin
bool clock_configure_gpin (clock_handle_t clock, uint gpio, uint32_t src_freq, uint32_t freq)
Configure a clock to come from a gpio input.
Parameters
clock
The clock to configure
gpio
The GPIO pin to run the clock from. Valid GPIOs are: 20 and 22.
src_freq
Frequency of the input clock source
freq
Requested frequency
4.1.4.7.3. clock_configure_int_divider
void clock_configure_int_divider (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq, uint32_t
int_divider)
Configure the specified clock to use the undividded input source.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 98

See the tables in the description for details on the possible values for clock sources.
Parameters
clock
The clock to configure
src
The main clock source, can be 0.
auxsrc
The auxiliary clock source, which depends on which clock is being set. Can be 0
src_freq
Frequency of the input clock source
int_divider
an integer divider
4.1.4.7.4. clock_configure_undivided
void clock_configure_undivided (clock_handle_t clock, uint32_t src, uint32_t auxsrc, uint32_t src_freq)
Configure the specified clock to use the undividded input source.
See the tables in the description for details on the possible values for clock sources.
Parameters
clock
The clock to configure
src
The main clock source, can be 0.
auxsrc
The auxiliary clock source, which depends on which clock is being set. Can be 0
src_freq
Frequency of the input clock source
4.1.4.7.5. clock_get_hz
uint32_t clock_get_hz (clock_handle_t clock)
Get the current frequency of the specified clock.
Parameters
clock
Clock
Returns
Clock frequency in Hz
4.1.4.7.6. clock_gpio_init
static void clock_gpio_init (uint gpio, uint src, float div) [inline], [static]
Output an optionally divided clock to the specified gpio pin.
Parameters
gpio
The GPIO pin to output the clock to. Valid GPIOs are: 21, 23, 24, 25. These GPIOs are connected to the
GPOUT0-3 clock generators.
src
The source clock. See the register field CLOCKS_CLK_GPOUT0_CTRL_AUXSRC for a full list. The list is
the same for each GPOUT clock generator.
div
The float amount to divide the source clock by. This is useful to not overwhelm the GPIO pin with a fast
clock.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 99

4.1.4.7.7. clock_gpio_init_int_frac
void clock_gpio_init_int_frac (uint gpio, uint src, uint32_t div_int, uint8_t div_frac)
Output an optionally divided clock to the specified gpio pin.
Parameters
gpio
The GPIO pin to output the clock to. Valid GPIOs are: 21, 23, 24, 25. These GPIOs are connected to
the GPOUT0-3 clock generators.
src
The source clock. See the register field CLOCKS_CLK_GPOUT0_CTRL_AUXSRC for a full list. The list
is the same for each GPOUT clock generator.
div_int
The integer part of the value to divide the source clock by. This is useful to not overwhelm the GPIO
pin with a fast clock. this is in range of 1..2^24-1.
div_frac
The fractional part of the value to divide the source clock by. This is in range of 0..255 (/256).
4.1.4.7.8. clock_set_reported_hz
void clock_set_reported_hz (clock_handle_t clock, uint hz)
Set the "current frequency" of the clock as reported by clock_get_hz without actually changing the clock.
See also
clock_get_hz()
4.1.4.7.9. clock_stop
void clock_stop (clock_handle_t clock)
Stop the specified clock.
Parameters
clock
The clock to stop
4.1.4.7.10. clocks_enable_resus
void clocks_enable_resus (resus_callback_t resus_callback)
Enable the resus function. Restarts clk_sys if it is accidentally stopped.
The resuscitate function will restart the system clock if it falls below a certain speed (or stops). This could happen if the
clock source the system clock is running from stops. For example if a PLL is stopped.
Parameters
resus_callback
a function pointer provided by the user to call if a resus event happens.
4.1.4.7.11. frequency_count_khz
uint32_t frequency_count_khz (uint src)
Measure a clocks frequency using the Frequency counter.
Uses the inbuilt frequency counter to measure the specified clocks frequency. Currently, this function is accurate to +-
1KHz. See the datasheet for more details.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 100

4.1.5. hardware_divider
RP2040 Low Low-level hardware-divider API. Non-RP2040 platforms provide software versions of all the functions.
4.1.5.1. Detailed Description
The SIO contains an 8-cycle signed/unsigned divide/modulo circuit, per core. Calculation is started by writing a dividend
and divisor to the two argument registers, DIVIDEND and DIVISOR. The divider calculates the quotient / and remainder %
of this division over the next 8 cycles, and on the 9th cycle the results can be read from the two result registers
DIV_QUOTIENT and DIV_REMAINDER. A 'ready' bit in register DIV_CSR can be polled to wait for the calculation to
complete, or software can insert a fixed 8-cycle delay
This header provides low level macros and inline functions for accessing the hardware dividers directly, and perhaps
most usefully performing asynchronous divides. These functions however do not follow the regular SDK conventions for
saving/restoring the divider state, so are not generally safe to call from interrupt handlers
The pico_divider library provides a more user friendly set of APIs over the divider (and support for 64 bit divides), and of
course by default regular C language integer divisions are redirected through that library, meaning you can just use C
level / and % operators and gain the benefits of the fast hardware divider.
On RP2350 there is no hardware divider, and the functions are implemented in software
See also
pico_divider
4.1.5.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/divider.h"
Ê4
Ê5 int main() {
Ê6 stdio_init_all();
Ê7 printf("Hello, divider!\n");
Ê8
Ê9 // This is the basic hardware divider function
10 int32_t dividend = 123456;
11 int32_t divisor = -321;
12 divmod_result_t result = hw_divider_divmod_s32(dividend, divisor);
13
14 printf("%d/%d = %d remainder %d\n", dividend, divisor, to_quotient_s32(result),
Ê to_remainder_s32(result));
15
16 // Is it right?
17
18 printf("Working backwards! Result %d should equal %d!\n\n",
19 to_quotient_s32(result) * divisor + to_remainder_s32(result), dividend);
20
21 // This is the recommended unsigned fast divider for general use.
22 int32_t udividend = 123456;
23 int32_t udivisor = 321;
24 divmod_result_t uresult = hw_divider_divmod_u32(udividend, udivisor);
25
26 printf("%d/%d = %d remainder %d\n", udividend, udivisor, to_quotient_u32(uresult),
Ê to_remainder_u32(uresult));
27
28 // Is it right?
29
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 101

30 printf("Working backwards! Result %d should equal %d!\n\n",
31 to_quotient_u32(result) * divisor + to_remainder_u32(result), dividend);
32
33 // You can also do divides asynchronously. Divides will be complete after 8 cycles.
34
35 hw_divider_divmod_s32_start(dividend, divisor);
36
37 // Do something for 8 cycles!
38
39 // In this example, our results function will wait for completion.
40 // Use hw_divider_result_nowait() if you don't want to wait, but are sure you have delayed
Ê at least 8 cycles
41
42 result = hw_divider_result_wait();
43
44 printf("Async result %d/%d = %d remainder %d\n", dividend, divisor, to_quotient_s32
Ê (result),
45 to_remainder_s32(result));
46
47 // For a really fast divide, you can use the inlined versions... the / involves a function
Ê call as / always does
48 // when using the ARM AEABI, so if you really want the best performance use the inlined
Ê versions.
49 // Note that the / operator function DOES use the hardware divider by default, although you
Ê can change
50 // that behavior by calling pico_set_divider_implementation in the cmake build for your
Ê target.
51 printf("%d / %d = (by operator %d) (inlined %d)\n", dividend, divisor,
52 dividend / divisor, hw_divider_s32_quotient_inlined(dividend, divisor));
53
54 // Note however you must manually save/restore the divider state if you call the inlined
Ê methods from within an IRQ
55 // handler.
56 hw_divider_state_t state;
57 hw_divider_divmod_s32_start(dividend, divisor);
58 hw_divider_save_state(&state);
59
60 hw_divider_divmod_s32_start(123, 7);
61 printf("inner %d / %d = %d\n", 123, 7, hw_divider_s32_quotient_wait());
62
63 hw_divider_restore_state(&state);
64 int32_t tmp = hw_divider_s32_quotient_wait();
65 printf("outer divide %d / %d = %d\n", dividend, divisor, tmp);
66 return 0;
67 }
4.1.5.2. Functions
static divmod_result_t hw_divider_divmod_s32 (int32_t a, int32_t b)
Do a signed HW divide and wait for result.
static divmod_result_t hw_divider_divmod_u32 (uint32_t a, uint32_t b)
Do an unsigned HW divide and wait for result.
static void hw_divider_divmod_s32_start (int32_t a, int32_t b)
Start a signed asynchronous divide.
static void hw_divider_divmod_u32_start (uint32_t a, uint32_t b)
Start an unsigned asynchronous divide.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 102

static void hw_divider_wait_ready (void)
Wait for a divide to complete.
static divmod_result_t hw_divider_result_nowait (void)
Return result of HW divide, nowait.
static divmod_result_t hw_divider_result_wait (void)
Return result of last asynchronous HW divide.
static uint32_t to_quotient_u32 (divmod_result_t r)
Efficient extraction of unsigned quotient from 32p32 fixed point.
static int32_t to_quotient_s32 (divmod_result_t r)
Efficient extraction of signed quotient from 32p32 fixed point.
static uint32_t to_remainder_u32 (divmod_result_t r)
Efficient extraction of unsigned remainder from 32p32 fixed point.
static int32_t to_remainder_s32 (divmod_result_t r)
Efficient extraction of signed remainder from 32p32 fixed point.
static uint32_t hw_divider_u32_quotient_wait (void)
Return result of last asynchronous HW divide, unsigned quotient only.
static int32_t hw_divider_s32_quotient_wait (void)
Return result of last asynchronous HW divide, signed quotient only.
static uint32_t hw_divider_u32_remainder_wait (void)
Return result of last asynchronous HW divide, unsigned remainder only.
static int32_t hw_divider_s32_remainder_wait (void)
Return result of last asynchronous HW divide, signed remainder only.
static uint32_t hw_divider_u32_quotient (uint32_t a, uint32_t b)
Do an unsigned HW divide, wait for result, return quotient.
static uint32_t hw_divider_u32_remainder (uint32_t a, uint32_t b)
Do an unsigned HW divide, wait for result, return remainder.
static int32_t hw_divider_quotient_s32 (int32_t a, int32_t b)
Do a signed HW divide, wait for result, return quotient.
static int32_t hw_divider_remainder_s32 (int32_t a, int32_t b)
Do a signed HW divide, wait for result, return remainder.
static void hw_divider_pause (void)
Pause for exact amount of time needed for a asynchronous divide to complete.
static uint32_t hw_divider_u32_quotient_inlined (uint32_t a, uint32_t b)
Do a hardware unsigned HW divide, wait for result, return quotient.
static uint32_t hw_divider_u32_remainder_inlined (uint32_t a, uint32_t b)
Do a hardware unsigned HW divide, wait for result, return remainder.
static int32_t hw_divider_s32_quotient_inlined (int32_t a, int32_t b)
Do a hardware signed HW divide, wait for result, return quotient.
static int32_t hw_divider_s32_remainder_inlined (int32_t a, int32_t b)
Do a hardware signed HW divide, wait for result, return remainder.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 103

static void hw_divider_save_state (hw_divider_state_t *dest)
Save the calling cores hardware divider state.
static void hw_divider_restore_state (hw_divider_state_t *src)
Load a saved hardware divider state into the current core’s hardware divider.
4.1.5.3. Function Documentation
4.1.5.3.1. hw_divider_divmod_s32
static divmod_result_t hw_divider_divmod_s32 (int32_t a, int32_t b) [inline], [static]
Do a signed HW divide and wait for result.
Divide a by b, wait for calculation to complete, return result as a pair of 32-bit quotient/remainder values.
Parameters
a
The dividend
b
The divisor
Returns
Results of divide as a pair of 32-bit quotient/remainder values.
4.1.5.3.2. hw_divider_divmod_s32_start
static void hw_divider_divmod_s32_start (int32_t a, int32_t b) [inline], [static]
Start a signed asynchronous divide.
Start a divide of the specified signed parameters. You should wait for 8 cycles (__div_pause()) or wait for the ready bit to
be set (hw_divider_wait_ready()) prior to reading the results.
Parameters
a
The dividend
b
The divisor
4.1.5.3.3. hw_divider_divmod_u32
static divmod_result_t hw_divider_divmod_u32 (uint32_t a, uint32_t b) [inline], [static]
Do an unsigned HW divide and wait for result.
Divide a by b, wait for calculation to complete, return result as a pair of 32-bit quotient/remainder values.
Parameters
a
The dividend
b
The divisor
Returns
Results of divide as a pair of 32-bit quotient/remainder values.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 104

4.1.5.3.4. hw_divider_divmod_u32_start
static void hw_divider_divmod_u32_start (uint32_t a, uint32_t b) [inline], [static]
Start an unsigned asynchronous divide.
Start a divide of the specified unsigned parameters. You should wait for 8 cycles (__div_pause()) or wait for the ready bit
to be set (hw_divider_wait_ready()) prior to reading the results.
Parameters
a
The dividend
b
The divisor
4.1.5.3.5. hw_divider_pause
static void hw_divider_pause (void) [inline], [static]
Pause for exact amount of time needed for a asynchronous divide to complete.
4.1.5.3.6. hw_divider_quotient_s32
static int32_t hw_divider_quotient_s32 (int32_t a, int32_t b) [inline], [static]
Do a signed HW divide, wait for result, return quotient.
Divide a by b, wait for calculation to complete, return quotient.
Parameters
a
The dividend
b
The divisor
Returns
Quotient results of the divide
4.1.5.3.7. hw_divider_remainder_s32
static int32_t hw_divider_remainder_s32 (int32_t a, int32_t b) [inline], [static]
Do a signed HW divide, wait for result, return remainder.
Divide a by b, wait for calculation to complete, return remainder.
Parameters
a
The dividend
b
The divisor
Returns
Remainder results of the divide
4.1.5.3.8. hw_divider_restore_state
static void hw_divider_restore_state (hw_divider_state_t * src) [inline], [static]
Load a saved hardware divider state into the current core’s hardware divider.
Copy the passed hardware divider state into the hardware divider.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 105

Parameters
src
the location to load the divider state from
4.1.5.3.9. hw_divider_result_nowait
static divmod_result_t hw_divider_result_nowait (void) [inline], [static]
Return result of HW divide, nowait.
NOTE
This is UNSAFE in that the calculation may not have been completed.
Returns
Current result. Most significant 32 bits are the remainder, lower 32 bits are the quotient.
4.1.5.3.10. hw_divider_result_wait
static divmod_result_t hw_divider_result_wait (void) [inline], [static]
Return result of last asynchronous HW divide.
This function waits for the result to be ready by calling hw_divider_wait_ready().
Returns
Current result. Most significant 32 bits are the remainder, lower 32 bits are the quotient.
4.1.5.3.11. hw_divider_s32_quotient_inlined
static int32_t hw_divider_s32_quotient_inlined (int32_t a, int32_t b) [inline], [static]
Do a hardware signed HW divide, wait for result, return quotient.
Divide a by b, wait for calculation to complete, return quotient.
Parameters
a
The dividend
b
The divisor
Returns
Quotient result of the divide
4.1.5.3.12. hw_divider_s32_quotient_wait
static int32_t hw_divider_s32_quotient_wait (void) [inline], [static]
Return result of last asynchronous HW divide, signed quotient only.
This function waits for the result to be ready by calling hw_divider_wait_ready().
Returns
Current signed quotient result.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 106

4.1.5.3.13. hw_divider_s32_remainder_inlined
static int32_t hw_divider_s32_remainder_inlined (int32_t a, int32_t b) [inline], [static]
Do a hardware signed HW divide, wait for result, return remainder.
Divide a by b, wait for calculation to complete, return remainder.
Parameters
a
The dividend
b
The divisor
Returns
Remainder result of the divide
4.1.5.3.14. hw_divider_s32_remainder_wait
static int32_t hw_divider_s32_remainder_wait (void) [inline], [static]
Return result of last asynchronous HW divide, signed remainder only.
This function waits for the result to be ready by calling hw_divider_wait_ready().
Returns
Current remainder results.
4.1.5.3.15. hw_divider_save_state
static void hw_divider_save_state (hw_divider_state_t * dest) [inline], [static]
Save the calling cores hardware divider state.
Copy the current core’s hardware divider state into the provided structure. This method waits for the divider results to
be stable, then copies them to memory. They can be restored via hw_divider_restore_state()
Parameters
dest
the location to store the divider state
4.1.5.3.16. hw_divider_u32_quotient
static uint32_t hw_divider_u32_quotient (uint32_t a, uint32_t b) [inline], [static]
Do an unsigned HW divide, wait for result, return quotient.
Divide a by b, wait for calculation to complete, return quotient.
Parameters
a
The dividend
b
The divisor
Returns
Quotient results of the divide
4.1.5.3.17. hw_divider_u32_quotient_inlined
static uint32_t hw_divider_u32_quotient_inlined (uint32_t a, uint32_t b) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 107

Do a hardware unsigned HW divide, wait for result, return quotient.
Divide a by b, wait for calculation to complete, return quotient.
Parameters
a
The dividend
b
The divisor
Returns
Quotient result of the divide
4.1.5.3.18. hw_divider_u32_quotient_wait
static uint32_t hw_divider_u32_quotient_wait (void) [inline], [static]
Return result of last asynchronous HW divide, unsigned quotient only.
This function waits for the result to be ready by calling hw_divider_wait_ready().
Returns
Current unsigned quotient result.
4.1.5.3.19. hw_divider_u32_remainder
static uint32_t hw_divider_u32_remainder (uint32_t a, uint32_t b) [inline], [static]
Do an unsigned HW divide, wait for result, return remainder.
Divide a by b, wait for calculation to complete, return remainder.
Parameters
a
The dividend
b
The divisor
Returns
Remainder results of the divide
4.1.5.3.20. hw_divider_u32_remainder_inlined
static uint32_t hw_divider_u32_remainder_inlined (uint32_t a, uint32_t b) [inline], [static]
Do a hardware unsigned HW divide, wait for result, return remainder.
Divide a by b, wait for calculation to complete, return remainder.
Parameters
a
The dividend
b
The divisor
Returns
Remainder result of the divide
4.1.5.3.21. hw_divider_u32_remainder_wait
static uint32_t hw_divider_u32_remainder_wait (void) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 108

Return result of last asynchronous HW divide, unsigned remainder only.
This function waits for the result to be ready by calling hw_divider_wait_ready().
Returns
Current unsigned remainder result.
4.1.5.3.22. hw_divider_wait_ready
static void hw_divider_wait_ready (void) [inline], [static]
Wait for a divide to complete.
Wait for a divide to complete
4.1.5.3.23. to_quotient_s32
static int32_t to_quotient_s32 (divmod_result_t r) [inline], [static]
Efficient extraction of signed quotient from 32p32 fixed point.
Parameters
r
A pair of 32-bit quotient/remainder values.
Returns
Unsigned quotient
4.1.5.3.24. to_quotient_u32
static uint32_t to_quotient_u32 (divmod_result_t r) [inline], [static]
Efficient extraction of unsigned quotient from 32p32 fixed point.
Parameters
r
A pair of 32-bit quotient/remainder values.
Returns
Unsigned quotient
4.1.5.3.25. to_remainder_s32
static int32_t to_remainder_s32 (divmod_result_t r) [inline], [static]
Efficient extraction of signed remainder from 32p32 fixed point.
Parameters
r
A pair of 32-bit quotient/remainder values.
Returns
Signed remainder
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 109

NOTE
On arm this is just a 32 bit register move or a nop
4.1.5.3.26. to_remainder_u32
static uint32_t to_remainder_u32 (divmod_result_t r) [inline], [static]
Efficient extraction of unsigned remainder from 32p32 fixed point.
Parameters
r
A pair of 32-bit quotient/remainder values.
Returns
Unsigned remainder
NOTE
On Arm this is just a 32 bit register move or a nop
4.1.6. hardware_dcp
Assembly macros for the Double Coprocessor.
4.1.7. hardware_dma
DMA Controller API.
4.1.7.1. Detailed Description
The RP-series microcontroller Direct Memory Access (DMA) master performs bulk data transfers on a processor’s
behalf. This leaves processors free to attend to other tasks, or enter low-power sleep states. The data throughput of the
DMA is also significantly higher than one of RP-series microcontroller’s processors.
The DMA can perform one read access and one write access, up to 32 bits in size, every clock cycle. There are 12
independent channels, which each supervise a sequence of bus transfers, usually in one of the following scenarios:
•
Memory to peripheral
•
Peripheral to memory
•
Memory to memory
4.1.7.2. Modules
channel_config
DMA channel configuration .
4.1.7.3. Macros
•
#define DMA_IRQ_NUM(irq_index)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 110

4.1.7.4. Typedefs
typedef enum dreq_num_rp2350 dreq_num_t
DREQ numbers for DMA pacing on RP2350 (used as typedef dreq_num_t)
typedef enum dreq_num_rp2040 dreq_num_t
DREQ numbers for DMA pacing on RP2040 (used as typedef dreq_num_t)
4.1.7.5. Enumerations
enum dreq_num_rp2350 { DREQ_PIO0_TX0 = 0, DREQ_PIO0_TX1 = 1, DREQ_PIO0_TX2 = 2, DREQ_PIO0_TX3 = 3, DREQ_PIO0_RX0 = 4,
DREQ_PIO0_RX1 = 5, DREQ_PIO0_RX2 = 6, DREQ_PIO0_RX3 = 7, DREQ_PIO1_TX0 = 8, DREQ_PIO1_TX1 = 9, DREQ_PIO1_TX2 = 10,
DREQ_PIO1_TX3 = 11, DREQ_PIO1_RX0 = 12, DREQ_PIO1_RX1 = 13, DREQ_PIO1_RX2 = 14, DREQ_PIO1_RX3 = 15, DREQ_PIO2_TX0 = 16,
DREQ_PIO2_TX1 = 17, DREQ_PIO2_TX2 = 18, DREQ_PIO2_TX3 = 19, DREQ_PIO2_RX0 = 20, DREQ_PIO2_RX1 = 21, DREQ_PIO2_RX2 = 22,
DREQ_PIO2_RX3 = 23, DREQ_SPI0_TX = 24, DREQ_SPI0_RX = 25, DREQ_SPI1_TX = 26, DREQ_SPI1_RX = 27, DREQ_UART0_TX = 28,
DREQ_UART0_RX = 29, DREQ_UART1_TX = 30, DREQ_UART1_RX = 31, DREQ_PWM_WRAP0 = 32, DREQ_PWM_WRAP1 = 33, DREQ_PWM_WRAP2 =
34, DREQ_PWM_WRAP3 = 35, DREQ_PWM_WRAP4 = 36, DREQ_PWM_WRAP5 = 37, DREQ_PWM_WRAP6 = 38, DREQ_PWM_WRAP7 = 39,
DREQ_PWM_WRAP8 = 40, DREQ_PWM_WRAP9 = 41, DREQ_PWM_WRAP10 = 42, DREQ_PWM_WRAP11 = 43, DREQ_I2C0_TX = 44, DREQ_I2C0_RX =
45, DREQ_I2C1_TX = 46, DREQ_I2C1_RX = 47, DREQ_ADC = 48, DREQ_XIP_STREAM = 49, DREQ_XIP_QMITX = 50, DREQ_XIP_QMIRX = 51,
DREQ_HSTX = 52, DREQ_CORESIGHT = 53, DREQ_SHA256 = 54, DREQ_DMA_TIMER0 = 59, DREQ_DMA_TIMER1 = 60, DREQ_DMA_TIMER2 = 61,
DREQ_DMA_TIMER3 = 62, DREQ_FORCE = 63, DREQ_COUNT }
DREQ numbers for DMA pacing on RP2350 (used as typedef dreq_num_t)
enum dreq_num_rp2040 { DREQ_PIO0_TX0 = 0, DREQ_PIO0_TX1 = 1, DREQ_PIO0_TX2 = 2, DREQ_PIO0_TX3 = 3, DREQ_PIO0_RX0 = 4,
DREQ_PIO0_RX1 = 5, DREQ_PIO0_RX2 = 6, DREQ_PIO0_RX3 = 7, DREQ_PIO1_TX0 = 8, DREQ_PIO1_TX1 = 9, DREQ_PIO1_TX2 = 10,
DREQ_PIO1_TX3 = 11, DREQ_PIO1_RX0 = 12, DREQ_PIO1_RX1 = 13, DREQ_PIO1_RX2 = 14, DREQ_PIO1_RX3 = 15, DREQ_SPI0_TX = 16,
DREQ_SPI0_RX = 17, DREQ_SPI1_TX = 18, DREQ_SPI1_RX = 19, DREQ_UART0_TX = 20, DREQ_UART0_RX = 21, DREQ_UART1_TX = 22,
DREQ_UART1_RX = 23, DREQ_PWM_WRAP0 = 24, DREQ_PWM_WRAP1 = 25, DREQ_PWM_WRAP2 = 26, DREQ_PWM_WRAP3 = 27, DREQ_PWM_WRAP4 =
28, DREQ_PWM_WRAP5 = 29, DREQ_PWM_WRAP6 = 30, DREQ_PWM_WRAP7 = 31, DREQ_I2C0_TX = 32, DREQ_I2C0_RX = 33, DREQ_I2C1_TX =
34, DREQ_I2C1_RX = 35, DREQ_ADC = 36, DREQ_XIP_STREAM = 37, DREQ_XIP_SSITX = 38, DREQ_XIP_SSIRX = 39, DREQ_DMA_TIMER0 =
59, DREQ_DMA_TIMER1 = 60, DREQ_DMA_TIMER2 = 61, DREQ_DMA_TIMER3 = 62, DREQ_FORCE = 63, DREQ_COUNT }
DREQ numbers for DMA pacing on RP2040 (used as typedef dreq_num_t)
enum dma_channel_transfer_size { DMA_SIZE_8 = 0, DMA_SIZE_16 = 1, DMA_SIZE_32 = 2 }
Enumeration of available DMA channel transfer sizes.
4.1.7.6. Functions
void dma_channel_claim (uint channel)
Mark a dma channel as used.
void dma_claim_mask (uint32_t channel_mask)
Mark multiple dma channels as used.
void dma_channel_unclaim (uint channel)
Mark a dma channel as no longer used.
void dma_unclaim_mask (uint32_t channel_mask)
Mark multiple dma channels as no longer used.
int dma_claim_unused_channel (bool required)
Claim a free dma channel.
bool dma_channel_is_claimed (uint channel)
Determine if a dma channel is claimed.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 111

static void dma_channel_set_config (uint channel, const dma_channel_config *config, bool trigger)
Set a channel configuration.
static void dma_channel_set_read_addr (uint channel, const volatile void *read_addr, bool trigger)
Set the DMA initial read address.
static void dma_channel_set_write_addr (uint channel, volatile void *write_addr, bool trigger)
Set the DMA initial write address.
static void dma_channel_set_trans_count (uint channel, uint32_t trans_count, bool trigger)
Set the number of bus transfers the channel will do.
static void dma_channel_configure (uint channel, const dma_channel_config *config, volatile void *write_addr, const
volatile void *read_addr, uint transfer_count, bool trigger)
Configure all DMA parameters and optionally start transfer.
static void dma_channel_transfer_from_buffer_now (uint channel, const volatile void *read_addr, uint32_t transfer_count)
Start a DMA transfer from a buffer immediately.
static void dma_channel_transfer_to_buffer_now (uint channel, volatile void *write_addr, uint32_t transfer_count)
Start a DMA transfer to a buffer immediately.
static void dma_start_channel_mask (uint32_t chan_mask)
Start one or more channels simultaneously.
static void dma_channel_start (uint channel)
Start a single DMA channel.
static void dma_channel_abort (uint channel)
Stop a DMA transfer.
static void dma_channel_set_irq0_enabled (uint channel, bool enabled)
Enable single DMA channel’s interrupt via DMA_IRQ_0.
static void dma_set_irq0_channel_mask_enabled (uint32_t channel_mask, bool enabled)
Enable multiple DMA channels' interrupts via DMA_IRQ_0.
static void dma_channel_set_irq1_enabled (uint channel, bool enabled)
Enable single DMA channel’s interrupt via DMA_IRQ_1.
static void dma_set_irq1_channel_mask_enabled (uint32_t channel_mask, bool enabled)
Enable multiple DMA channels' interrupts via DMA_IRQ_1.
static void dma_irqn_set_channel_enabled (uint irq_index, uint channel, bool enabled)
Enable single DMA channel interrupt on either DMA_IRQ_0 or DMA_IRQ_1.
static void dma_irqn_set_channel_mask_enabled (uint irq_index, uint32_t channel_mask, bool enabled)
Enable multiple DMA channels' interrupt via either DMA_IRQ_0 or DMA_IRQ_1.
static bool dma_channel_get_irq0_status (uint channel)
Determine if a particular channel is a cause of DMA_IRQ_0.
static bool dma_channel_get_irq1_status (uint channel)
Determine if a particular channel is a cause of DMA_IRQ_1.
static bool dma_irqn_get_channel_status (uint irq_index, uint channel)
Determine if a particular channel is a cause of DMA_IRQ_N.
static void dma_channel_acknowledge_irq0 (uint channel)
Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_0.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 112

static void dma_channel_acknowledge_irq1 (uint channel)
Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_1.
static void dma_irqn_acknowledge_channel (uint irq_index, uint channel)
Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_N.
static bool dma_channel_is_busy (uint channel)
Check if DMA channel is busy.
static void dma_channel_wait_for_finish_blocking (uint channel)
Wait for a DMA channel transfer to complete.
static void dma_sniffer_enable (uint channel, uint mode, bool force_channel_enable)
Enable the DMA sniffing targeting the specified channel.
static void dma_sniffer_set_byte_swap_enabled (bool swap)
Enable the Sniffer byte swap function.
static void dma_sniffer_set_output_invert_enabled (bool invert)
Enable the Sniffer output invert function.
static void dma_sniffer_set_output_reverse_enabled (bool reverse)
Enable the Sniffer output bit reversal function.
static void dma_sniffer_disable (void)
Disable the DMA sniffer.
static void dma_sniffer_set_data_accumulator (uint32_t seed_value)
Set the sniffer’s data accumulator with initial value.
static uint32_t dma_sniffer_get_data_accumulator (void)
Get the sniffer’s data accumulator value.
void dma_timer_claim (uint timer)
Mark a dma timer as used.
void dma_timer_unclaim (uint timer)
Mark a dma timer as no longer used.
int dma_claim_unused_timer (bool required)
Claim a free dma timer.
bool dma_timer_is_claimed (uint timer)
Determine if a dma timer is claimed.
static void dma_timer_set_fraction (uint timer, uint16_t numerator, uint16_t denominator)
Set the multiplier for the given DMA timer.
static uint dma_get_timer_dreq (uint timer_num)
Return the DREQ number for a given DMA timer.
static int dma_get_irq_num (uint irq_index)
Return DMA_IRQ_<irqn>
void dma_channel_cleanup (uint channel)
Performs DMA channel cleanup after use.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 113

4.1.7.7. Macro Definition Documentation
4.1.7.7.1. DMA_IRQ_NUM
#define DMA_IRQ_NUM(irq_index)
Returns the irq_num_t for the nth DMA interrupt.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.7.8. Typedef Documentation
4.1.7.8.1. dreq_num_t
typedef enum dreq_num_rp2350 dreq_num_t
DREQ numbers for DMA pacing on RP2350 (used as typedef dreq_num_t)
4.1.7.8.2. dreq_num_t
typedef enum dreq_num_rp2040 dreq_num_t
DREQ numbers for DMA pacing on RP2040 (used as typedef dreq_num_t)
4.1.7.9. Enumeration Type Documentation
4.1.7.9.1. dreq_num_rp2350
enum dreq_num_rp2350
DREQ numbers for DMA pacing on RP2350 (used as typedef dreq_num_t)
Table 13. Enumerator
DREQ_PIO0_TX0
Select PIO0’s TX FIFO 0 as DREQ.
DREQ_PIO0_TX1
Select PIO0’s TX FIFO 1 as DREQ.
DREQ_PIO0_TX2
Select PIO0’s TX FIFO 2 as DREQ.
DREQ_PIO0_TX3
Select PIO0’s TX FIFO 3 as DREQ.
DREQ_PIO0_RX0
Select PIO0’s RX FIFO 0 as DREQ.
DREQ_PIO0_RX1
Select PIO0’s RX FIFO 1 as DREQ.
DREQ_PIO0_RX2
Select PIO0’s RX FIFO 2 as DREQ.
DREQ_PIO0_RX3
Select PIO0’s RX FIFO 3 as DREQ.
DREQ_PIO1_TX0
Select PIO1’s TX FIFO 0 as DREQ.
DREQ_PIO1_TX1
Select PIO1’s TX FIFO 1 as DREQ.
DREQ_PIO1_TX2
Select PIO1’s TX FIFO 2 as DREQ.
DREQ_PIO1_TX3
Select PIO1’s TX FIFO 3 as DREQ.
DREQ_PIO1_RX0
Select PIO1’s RX FIFO 0 as DREQ.
DREQ_PIO1_RX1
Select PIO1’s RX FIFO 1 as DREQ.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 114

DREQ_PIO1_RX2
Select PIO1’s RX FIFO 2 as DREQ.
DREQ_PIO1_RX3
Select PIO1’s RX FIFO 3 as DREQ.
DREQ_PIO2_TX0
Select PIO2’s TX FIFO 0 as DREQ.
DREQ_PIO2_TX1
Select PIO2’s TX FIFO 1 as DREQ.
DREQ_PIO2_TX2
Select PIO2’s TX FIFO 2 as DREQ.
DREQ_PIO2_TX3
Select PIO2’s TX FIFO 3 as DREQ.
DREQ_PIO2_RX0
Select PIO2’s RX FIFO 0 as DREQ.
DREQ_PIO2_RX1
Select PIO2’s RX FIFO 1 as DREQ.
DREQ_PIO2_RX2
Select PIO2’s RX FIFO 2 as DREQ.
DREQ_PIO2_RX3
Select PIO2’s RX FIFO 3 as DREQ.
DREQ_SPI0_TX
Select SPI0’s TX FIFO as DREQ.
DREQ_SPI0_RX
Select SPI0’s RX FIFO as DREQ.
DREQ_SPI1_TX
Select SPI1’s TX FIFO as DREQ.
DREQ_SPI1_RX
Select SPI1’s RX FIFO as DREQ.
DREQ_UART0_TX
Select UART0’s TX FIFO as DREQ.
DREQ_UART0_RX
Select UART0’s RX FIFO as DREQ.
DREQ_UART1_TX
Select UART1’s TX FIFO as DREQ.
DREQ_UART1_RX
Select UART1’s RX FIFO as DREQ.
DREQ_PWM_WRAP0
Select PWM Counter 0’s Wrap Value as DREQ.
DREQ_PWM_WRAP1
Select PWM Counter 1’s Wrap Value as DREQ.
DREQ_PWM_WRAP2
Select PWM Counter 2’s Wrap Value as DREQ.
DREQ_PWM_WRAP3
Select PWM Counter 3’s Wrap Value as DREQ.
DREQ_PWM_WRAP4
Select PWM Counter 4’s Wrap Value as DREQ.
DREQ_PWM_WRAP5
Select PWM Counter 5’s Wrap Value as DREQ.
DREQ_PWM_WRAP6
Select PWM Counter 6’s Wrap Value as DREQ.
DREQ_PWM_WRAP7
Select PWM Counter 7’s Wrap Value as DREQ.
DREQ_PWM_WRAP8
Select PWM Counter 8’s Wrap Value as DREQ.
DREQ_PWM_WRAP9
Select PWM Counter 9’s Wrap Value as DREQ.
DREQ_PWM_WRAP10
Select PWM Counter 0’s Wrap Value as DREQ.
DREQ_PWM_WRAP11
Select PWM Counter 1’s Wrap Value as DREQ.
DREQ_I2C0_TX
Select I2C0’s TX FIFO as DREQ.
DREQ_I2C0_RX
Select I2C0’s RX FIFO as DREQ.
DREQ_I2C1_TX
Select I2C1’s TX FIFO as DREQ.
DREQ_I2C1_RX
Select I2C1’s RX FIFO as DREQ.
DREQ_ADC
Select the ADC as DREQ.
DREQ_XIP_STREAM
Select the XIP Streaming FIFO as DREQ.
DREQ_XIP_QMITX
Select XIP_QMITX as DREQ.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 115

DREQ_XIP_QMIRX
Select XIP_QMIRX as DREQ.
DREQ_HSTX
Select HSTX as DREQ.
DREQ_CORESIGHT
Select CORESIGHT as DREQ.
DREQ_SHA256
Select SHA256 as DREQ.
DREQ_DMA_TIMER0
Select DMA_TIMER0 as DREQ.
DREQ_DMA_TIMER1
Select DMA_TIMER0 as DREQ.
DREQ_DMA_TIMER2
Select DMA_TIMER1 as DREQ.
DREQ_DMA_TIMER3
Select DMA_TIMER3 as DREQ.
DREQ_FORCE
Select FORCE as DREQ.
4.1.7.9.2. dreq_num_rp2040
enum dreq_num_rp2040
DREQ numbers for DMA pacing on RP2040 (used as typedef dreq_num_t)
Table 14. Enumerator
DREQ_PIO0_TX0
Select PIO0’s TX FIFO 0 as DREQ.
DREQ_PIO0_TX1
Select PIO0’s TX FIFO 1 as DREQ.
DREQ_PIO0_TX2
Select PIO0’s TX FIFO 2 as DREQ.
DREQ_PIO0_TX3
Select PIO0’s TX FIFO 3 as DREQ.
DREQ_PIO0_RX0
Select PIO0’s RX FIFO 0 as DREQ.
DREQ_PIO0_RX1
Select PIO0’s RX FIFO 1 as DREQ.
DREQ_PIO0_RX2
Select PIO0’s RX FIFO 2 as DREQ.
DREQ_PIO0_RX3
Select PIO0’s RX FIFO 3 as DREQ.
DREQ_PIO1_TX0
Select PIO1’s TX FIFO 0 as DREQ.
DREQ_PIO1_TX1
Select PIO1’s TX FIFO 1 as DREQ.
DREQ_PIO1_TX2
Select PIO1’s TX FIFO 2 as DREQ.
DREQ_PIO1_TX3
Select PIO1’s TX FIFO 3 as DREQ.
DREQ_PIO1_RX0
Select PIO1’s RX FIFO 0 as DREQ.
DREQ_PIO1_RX1
Select PIO1’s RX FIFO 1 as DREQ.
DREQ_PIO1_RX2
Select PIO1’s RX FIFO 2 as DREQ.
DREQ_PIO1_RX3
Select PIO1’s RX FIFO 3 as DREQ.
DREQ_SPI0_TX
Select SPI0’s TX FIFO as DREQ.
DREQ_SPI0_RX
Select SPI0’s RX FIFO as DREQ.
DREQ_SPI1_TX
Select SPI1’s TX FIFO as DREQ.
DREQ_SPI1_RX
Select SPI1’s RX FIFO as DREQ.
DREQ_UART0_TX
Select UART0’s TX FIFO as DREQ.
DREQ_UART0_RX
Select UART0’s RX FIFO as DREQ.
DREQ_UART1_TX
Select UART1’s TX FIFO as DREQ.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 116

DREQ_UART1_RX
Select UART1’s RX FIFO as DREQ.
DREQ_PWM_WRAP0
Select PWM Counter 0’s Wrap Value as DREQ.
DREQ_PWM_WRAP1
Select PWM Counter 1’s Wrap Value as DREQ.
DREQ_PWM_WRAP2
Select PWM Counter 2’s Wrap Value as DREQ.
DREQ_PWM_WRAP3
Select PWM Counter 3’s Wrap Value as DREQ.
DREQ_PWM_WRAP4
Select PWM Counter 4’s Wrap Value as DREQ.
DREQ_PWM_WRAP5
Select PWM Counter 5’s Wrap Value as DREQ.
DREQ_PWM_WRAP6
Select PWM Counter 6’s Wrap Value as DREQ.
DREQ_PWM_WRAP7
Select PWM Counter 7’s Wrap Value as DREQ.
DREQ_I2C0_TX
Select I2C0’s TX FIFO as DREQ.
DREQ_I2C0_RX
Select I2C0’s RX FIFO as DREQ.
DREQ_I2C1_TX
Select I2C1’s TX FIFO as DREQ.
DREQ_I2C1_RX
Select I2C1’s RX FIFO as DREQ.
DREQ_ADC
Select the ADC as DREQ.
DREQ_XIP_STREAM
Select the XIP Streaming FIFO as DREQ.
DREQ_XIP_SSITX
Select the XIP SSI TX FIFO as DREQ.
DREQ_XIP_SSIRX
Select the XIP SSI RX FIFO as DREQ.
DREQ_DMA_TIMER0
Select DMA_TIMER0 as DREQ.
DREQ_DMA_TIMER1
Select DMA_TIMER0 as DREQ.
DREQ_DMA_TIMER2
Select DMA_TIMER1 as DREQ.
DREQ_DMA_TIMER3
Select DMA_TIMER3 as DREQ.
DREQ_FORCE
Select FORCE as DREQ.
4.1.7.9.3. dma_channel_transfer_size
enum dma_channel_transfer_size
Enumeration of available DMA channel transfer sizes.
Names indicate the number of bits.
Table 15. Enumerator
DMA_SIZE_8
Byte transfer (8 bits)
DMA_SIZE_16
Half word transfer (16 bits)
DMA_SIZE_32
Word transfer (32 bits)
4.1.7.10. Function Documentation
4.1.7.10.1. dma_channel_abort
static void dma_channel_abort (uint channel) [inline], [static]
Stop a DMA transfer.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 117

Function will only return once the DMA has stopped.
RP2040 only: Note that due to errata RP2040-E13, aborting a channel which has transfers in-flight (i.e. an individual read
has taken place but the corresponding write has not), the ABORT status bit will clear prematurely, and subsequently the
in-flight transfers will trigger a completion interrupt once they complete.
The effect of this is that you may see a spurious completion interrupt on the channel as a result of calling this method.
The calling code should be sure to ignore a completion IRQ as a result of this method. This may not require any
additional work, as aborting a channel which may be about to complete, when you have a completion IRQ handler
registered, is inherently race-prone, and so code is likely needed to disambiguate the two occurrences.
If that is not the case, but you do have a channel completion IRQ handler registered, you can simply disable/re-enable
the IRQ around the call to this method as shown by this code fragment (using DMA IRQ0).
1 // disable the channel on IRQ0
2 dma_channel_set_irq0_enabled(channel, false);
3 // abort the channel
4 dma_channel_abort(channel);
5 // clear the spurious IRQ (if there was one)
6 dma_channel_acknowledge_irq0(channel);
7 // re-enable the channel on IRQ0
8 dma_channel_set_irq0_enabled(channel, true);
RP2350 only: Due to errata RP12350-E5 (see the RP2350 datasheet for further detail), it is necessary to clear the enable
bit of the aborted channel and any chained channels prior to the abort to prevent re-triggering.
Parameters
channel
DMA channel
4.1.7.10.2. dma_channel_acknowledge_irq0
static void dma_channel_acknowledge_irq0 (uint channel) [inline], [static]
Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_0.
Parameters
channel
DMA channel
4.1.7.10.3. dma_channel_acknowledge_irq1
static void dma_channel_acknowledge_irq1 (uint channel) [inline], [static]
Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_1.
Parameters
channel
DMA channel
4.1.7.10.4. dma_channel_claim
void dma_channel_claim (uint channel)
Mark a dma channel as used.
Method for cooperative claiming of hardware. Will cause a panic if the channel is already claimed. Use of this method
by libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 118

channel
the dma channel
4.1.7.10.5. dma_channel_cleanup
void dma_channel_cleanup (uint channel)
Performs DMA channel cleanup after use.
This can be used to cleanup dma channels when they’re no longer needed, such that they are in a clean state for reuse.
IRQ’s for the channel are disabled, any in flight-transfer is aborted and any outstanding interrupts are cleared. The
channel is then clear to be reused for other purposes.
1 if (dma_channel >= 0) {
2 dma_channel_cleanup(dma_channel);
3 dma_channel_unclaim(dma_channel);
4 dma_channel = -1;
5 }
Parameters
channel
DMA channel
4.1.7.10.6. dma_channel_configure
static void dma_channel_configure (uint channel, const dma_channel_config * config, volatile void * write_addr, const
volatile void * read_addr, uint transfer_count, bool trigger) [inline], [static]
Configure all DMA parameters and optionally start transfer.
Parameters
channel
DMA channel
config
Pointer to DMA config structure
write_addr
Initial write address
read_addr
Initial read address
transfer_count
Number of transfers to perform
trigger
True to start the transfer immediately
4.1.7.10.7. dma_channel_get_irq0_status
static bool dma_channel_get_irq0_status (uint channel) [inline], [static]
Determine if a particular channel is a cause of DMA_IRQ_0.
Parameters
channel
DMA channel
Returns
true if the channel is a cause of DMA_IRQ_0, false otherwise
4.1.7.10.8. dma_channel_get_irq1_status
static bool dma_channel_get_irq1_status (uint channel) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 119

Determine if a particular channel is a cause of DMA_IRQ_1.
Parameters
channel
DMA channel
Returns
true if the channel is a cause of DMA_IRQ_1, false otherwise
4.1.7.10.9. dma_channel_is_busy
static bool dma_channel_is_busy (uint channel) [inline], [static]
Check if DMA channel is busy.
Parameters
channel
DMA channel
Returns
true if the channel is currently busy
4.1.7.10.10. dma_channel_is_claimed
bool dma_channel_is_claimed (uint channel)
Determine if a dma channel is claimed.
Parameters
channel
the dma channel
Returns
true if the channel is claimed, false otherwise
See also
dma_channel_claim
dma_channel_claim_mask
4.1.7.10.11. dma_channel_set_config
static void dma_channel_set_config (uint channel, const dma_channel_config * config, bool trigger) [inline], [static]
Set a channel configuration.
Parameters
channel
DMA channel
config
Pointer to a config structure with required configuration
trigger
True to trigger the transfer immediately
4.1.7.10.12. dma_channel_set_irq0_enabled
static void dma_channel_set_irq0_enabled (uint channel, bool enabled) [inline], [static]
Enable single DMA channel’s interrupt via DMA_IRQ_0.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 120

channel
DMA channel
enabled
true to enable interrupt 0 on specified channel, false to disable.
4.1.7.10.13. dma_channel_set_irq1_enabled
static void dma_channel_set_irq1_enabled (uint channel, bool enabled) [inline], [static]
Enable single DMA channel’s interrupt via DMA_IRQ_1.
Parameters
channel
DMA channel
enabled
true to enable interrupt 1 on specified channel, false to disable.
4.1.7.10.14. dma_channel_set_read_addr
static void dma_channel_set_read_addr (uint channel, const volatile void * read_addr, bool trigger) [inline], [static]
Set the DMA initial read address.
Parameters
channel
DMA channel
read_addr
Initial read address of transfer.
trigger
True to start the transfer immediately
4.1.7.10.15. dma_channel_set_trans_count
static void dma_channel_set_trans_count (uint channel, uint32_t trans_count, bool trigger) [inline], [static]
Set the number of bus transfers the channel will do.
Parameters
channel
DMA channel
trans_count
The number of transfers (not NOT bytes, see channel_config_set_transfer_data_size)
trigger
True to start the transfer immediately
4.1.7.10.16. dma_channel_set_write_addr
static void dma_channel_set_write_addr (uint channel, volatile void * write_addr, bool trigger) [inline], [static]
Set the DMA initial write address.
Parameters
channel
DMA channel
write_addr
Initial write address of transfer.
trigger
True to start the transfer immediately
4.1.7.10.17. dma_channel_start
static void dma_channel_start (uint channel) [inline], [static]
Start a single DMA channel.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 121

Parameters
channel
DMA channel
4.1.7.10.18. dma_channel_transfer_from_buffer_now
static void dma_channel_transfer_from_buffer_now (uint channel, const volatile void * read_addr, uint32_t transfer_count)
[inline], [static]
Start a DMA transfer from a buffer immediately.
Parameters
channel
DMA channel
read_addr
Sets the initial read address
transfer_count
Number of transfers to make. Not bytes, but the number of transfers of
channel_config_set_transfer_data_size() to be sent.
4.1.7.10.19. dma_channel_transfer_to_buffer_now
static void dma_channel_transfer_to_buffer_now (uint channel, volatile void * write_addr, uint32_t transfer_count)
[inline], [static]
Start a DMA transfer to a buffer immediately.
Parameters
channel
DMA channel
write_addr
Sets the initial write address
transfer_count
Number of transfers to make. Not bytes, but the number of transfers of
channel_config_set_transfer_data_size() to be sent.
4.1.7.10.20. dma_channel_unclaim
void dma_channel_unclaim (uint channel)
Mark a dma channel as no longer used.
Parameters
channel
the dma channel to release
4.1.7.10.21. dma_channel_wait_for_finish_blocking
static void dma_channel_wait_for_finish_blocking (uint channel) [inline], [static]
Wait for a DMA channel transfer to complete.
Parameters
channel
DMA channel
4.1.7.10.22. dma_claim_mask
void dma_claim_mask (uint32_t channel_mask)
Mark multiple dma channels as used.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 122

Method for cooperative claiming of hardware. Will cause a panic if any of the channels are already claimed. Use of this
method by libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
channel_mask
Bitfield of all required channels to claim (bit 0 == channel 0, bit 1 == channel 1 etc)
4.1.7.10.23. dma_claim_unused_channel
int dma_claim_unused_channel (bool required)
Claim a free dma channel.
Parameters
required
if true the function will panic if none are available
Returns
the dma channel number or -1 if required was false, and none were free
4.1.7.10.24. dma_claim_unused_timer
int dma_claim_unused_timer (bool required)
Claim a free dma timer.
Parameters
required
if true the function will panic if none are available
Returns
the dma timer number or -1 if required was false, and none were free
4.1.7.10.25. dma_get_irq_num
static int dma_get_irq_num (uint irq_index) [inline], [static]
Return DMA_IRQ_<irqn>
Parameters
irq_index
0 the DMA irq index
Returns
The irq_num_to use for DMA
4.1.7.10.26. dma_get_timer_dreq
static uint dma_get_timer_dreq (uint timer_num) [inline], [static]
Return the DREQ number for a given DMA timer.
Parameters
timer_num
DMA timer number 0-3
4.1.7.10.27. dma_irqn_acknowledge_channel
static void dma_irqn_acknowledge_channel (uint irq_index, uint channel) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 123

Acknowledge a channel IRQ, resetting it as the cause of DMA_IRQ_N.
Parameters
irq_index
the IRQ index; either 0 or 1 for DMA_IRQ_0 or DMA_IRQ_1
channel
DMA channel
4.1.7.10.28. dma_irqn_get_channel_status
static bool dma_irqn_get_channel_status (uint irq_index, uint channel) [inline], [static]
Determine if a particular channel is a cause of DMA_IRQ_N.
Parameters
irq_index
the IRQ index; either 0 or 1 for DMA_IRQ_0 or DMA_IRQ_1
channel
DMA channel
Returns
true if the channel is a cause of the DMA_IRQ_N, false otherwise
4.1.7.10.29. dma_irqn_set_channel_enabled
static void dma_irqn_set_channel_enabled (uint irq_index, uint channel, bool enabled) [inline], [static]
Enable single DMA channel interrupt on either DMA_IRQ_0 or DMA_IRQ_1.
Parameters
irq_index
the IRQ index; either 0 or 1 for DMA_IRQ_0 or DMA_IRQ_1
channel
DMA channel
enabled
true to enable interrupt via irq_index for specified channel, false to disable.
4.1.7.10.30. dma_irqn_set_channel_mask_enabled
static void dma_irqn_set_channel_mask_enabled (uint irq_index, uint32_t channel_mask, bool enabled) [inline], [static]
Enable multiple DMA channels' interrupt via either DMA_IRQ_0 or DMA_IRQ_1.
Parameters
irq_index
the IRQ index; either 0 or 1 for DMA_IRQ_0 or DMA_IRQ_1
channel_mask
Bitmask of all the channels to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable all the interrupts specified in the mask, false to disable all the interrupts specified
in the mask.
4.1.7.10.31. dma_set_irq0_channel_mask_enabled
static void dma_set_irq0_channel_mask_enabled (uint32_t channel_mask, bool enabled) [inline], [static]
Enable multiple DMA channels' interrupts via DMA_IRQ_0.
Parameters
channel_mask
Bitmask of all the channels to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable all the interrupts specified in the mask, false to disable all the interrupts specified
in the mask.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 124

4.1.7.10.32. dma_set_irq1_channel_mask_enabled
static void dma_set_irq1_channel_mask_enabled (uint32_t channel_mask, bool enabled) [inline], [static]
Enable multiple DMA channels' interrupts via DMA_IRQ_1.
Parameters
channel_mask
Bitmask of all the channels to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable all the interrupts specified in the mask, false to disable all the interrupts specified
in the mask.
4.1.7.10.33. dma_sniffer_disable
static void dma_sniffer_disable (void) [inline], [static]
Disable the DMA sniffer.
4.1.7.10.34. dma_sniffer_enable
static void dma_sniffer_enable (uint channel, uint mode, bool force_channel_enable) [inline], [static]
Enable the DMA sniffing targeting the specified channel.
The mode can be one of the following:
Mode Function
0x0 Calculate a CRC-32 (IEEE802.3 polynomial)
0x1 Calculate a CRC-32 (IEEE802.3 polynomial) with bit
reversed data
0x2 Calculate a CRC-16-CCITT
0x3 Calculate a CRC-16-CCITT with bit reversed data
0xe XOR reduction over all data. == 1 if the total 1 population
count is odd.
0xf Calculate a simple 32-bit checksum (addition with a 32 bit
accumulator)
Parameters
channel
DMA channel
mode
See description
force_channel_enable
Set true to also turn on sniffing in the channel configuration (this is usually what you
want, but sometimes you might have a chain DMA with only certain segments of the
chain sniffed, in which case you might pass false).
4.1.7.10.35. dma_sniffer_get_data_accumulator
static uint32_t dma_sniffer_get_data_accumulator (void) [inline], [static]
Get the sniffer’s data accumulator value.
Read value calculated by the hardware from sniffing the DMA stream
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 125

4.1.7.10.36. dma_sniffer_set_byte_swap_enabled
static void dma_sniffer_set_byte_swap_enabled (bool swap) [inline], [static]
Enable the Sniffer byte swap function.
Locally perform a byte reverse on the sniffed data, before feeding into checksum.
Note that the sniff hardware is downstream of the DMA channel byteswap performed in the read master: if
channel_config_set_bswap() and dma_sniffer_set_byte_swap_enabled() are both enabled, their effects cancel from the
sniffer’s point of view.
Parameters
swap
Set true to enable byte swapping
4.1.7.10.37. dma_sniffer_set_data_accumulator
static void dma_sniffer_set_data_accumulator (uint32_t seed_value) [inline], [static]
Set the sniffer’s data accumulator with initial value.
Generally, CRC algorithms are used with the data accumulator initially seeded with 0xFFFF or 0xFFFFFFFF (for crc16
and crc32 algorithms)
Parameters
seed_value
value to set data accumulator
4.1.7.10.38. dma_sniffer_set_output_invert_enabled
static void dma_sniffer_set_output_invert_enabled (bool invert) [inline], [static]
Enable the Sniffer output invert function.
If enabled, the sniff data result appears bit-inverted when read. This does not affect the way the checksum is calculated.
Parameters
invert
Set true to enable output bit inversion
4.1.7.10.39. dma_sniffer_set_output_reverse_enabled
static void dma_sniffer_set_output_reverse_enabled (bool reverse) [inline], [static]
Enable the Sniffer output bit reversal function.
If enabled, the sniff data result appears bit-reversed when read. This does not affect the way the checksum is
calculated.
Parameters
reverse
Set true to enable output bit reversal
4.1.7.10.40. dma_start_channel_mask
static void dma_start_channel_mask (uint32_t chan_mask) [inline], [static]
Start one or more channels simultaneously.
Parameters
chan_mask
Bitmask of all the channels requiring starting. Channel 0 = bit 0, channel 1 = bit 1 etc.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 126

4.1.7.10.41. dma_timer_claim
void dma_timer_claim (uint timer)
Mark a dma timer as used.
Method for cooperative claiming of hardware. Will cause a panic if the timer is already claimed. Use of this method by
libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
timer
the dma timer
4.1.7.10.42. dma_timer_is_claimed
bool dma_timer_is_claimed (uint timer)
Determine if a dma timer is claimed.
Parameters
timer
the dma timer
Returns
true if the timer is claimed, false otherwise
See also
dma_timer_claim
4.1.7.10.43. dma_timer_set_fraction
static void dma_timer_set_fraction (uint timer, uint16_t numerator, uint16_t denominator) [inline], [static]
Set the multiplier for the given DMA timer.
The timer will run at the system_clock_freq * numerator / denominator, so this is the speed that data elements will be
transferred at via a DMA channel using this timer as a DREQ. The multiplier must be less than or equal to one.
Parameters
timer
the dma timer
numerator
the fraction’s numerator
denominator
the fraction’s denominator
4.1.7.10.44. dma_timer_unclaim
void dma_timer_unclaim (uint timer)
Mark a dma timer as no longer used.
Method for cooperative claiming of hardware.
Parameters
timer
the dma timer to release
4.1.7.10.45. dma_unclaim_mask
void dma_unclaim_mask (uint32_t channel_mask)
Mark multiple dma channels as no longer used.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 127

Parameters
channel_mask
Bitfield of all channels to unclaim (bit 0 == channel 0, bit 1 == channel 1 etc)
4.1.7.11. channel_config
DMA channel configuration .
4.1.7.11.1. Detailed Description
A DMA channel needs to be configured, these functions provide handy helpers to set up configuration structures. See
dma_channel_config
4.1.7.11.2. Functions
static void channel_config_set_read_increment (dma_channel_config *c, bool incr)
Set DMA channel read increment in a channel configuration object.
static void channel_config_set_write_increment (dma_channel_config *c, bool incr)
Set DMA channel write increment in a channel configuration object.
static void channel_config_set_dreq (dma_channel_config *c, uint dreq)
Select a transfer request signal in a channel configuration object.
static void channel_config_set_chain_to (dma_channel_config *c, uint chain_to)
Set DMA channel chain_to channel in a channel configuration object.
static void channel_config_set_transfer_data_size (dma_channel_config *c, enum dma_channel_transfer_size size)
Set the size of each DMA bus transfer in a channel configuration object.
static void channel_config_set_ring (dma_channel_config *c, bool write, uint size_bits)
Set address wrapping parameters in a channel configuration object.
static void channel_config_set_bswap (dma_channel_config *c, bool bswap)
Set DMA byte swapping config in a channel configuration object.
static void channel_config_set_irq_quiet (dma_channel_config *c, bool irq_quiet)
Set IRQ quiet mode in a channel configuration object.
static void channel_config_set_high_priority (dma_channel_config *c, bool high_priority)
Set the channel priority in a channel configuration object.
static void channel_config_set_enable (dma_channel_config *c, bool enable)
Enable/Disable the DMA channel in a channel configuration object.
static void channel_config_set_sniff_enable (dma_channel_config *c, bool sniff_enable)
Enable access to channel by sniff hardware in a channel configuration object.
static dma_channel_config dma_channel_get_default_config (uint channel)
Get the default channel configuration for a given channel.
static dma_channel_config dma_get_channel_config (uint channel)
Get the current configuration for the specified channel.
static uint32_t channel_config_get_ctrl_value (const dma_channel_config *config)
Get the raw configuration register from a channel configuration.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 128

4.1.7.11.3. Function Documentation
channel_config_get_ctrl_value
static uint32_t channel_config_get_ctrl_value (const dma_channel_config * config) [inline], [static]
Get the raw configuration register from a channel configuration.
Parameters
config
Pointer to a config structure.
Returns
Register content
channel_config_set_bswap
static void channel_config_set_bswap (dma_channel_config * c, bool bswap) [inline], [static]
Set DMA byte swapping config in a channel configuration object.
No effect for byte data, for halfword data, the two bytes of each halfword are swapped. For word data, the four bytes of
each word are swapped to reverse their order.
Parameters
c
Pointer to channel configuration object
bswap
True to enable byte swapping
channel_config_set_chain_to
static void channel_config_set_chain_to (dma_channel_config * c, uint chain_to) [inline], [static]
Set DMA channel chain_to channel in a channel configuration object.
When this channel completes, it will trigger the channel indicated by chain_to. Disable by setting chain_to to itself (the
same channel)
Parameters
c
Pointer to channel configuration object
chain_to
Channel to trigger when this channel completes.
channel_config_set_dreq
static void channel_config_set_dreq (dma_channel_config * c, uint dreq) [inline], [static]
Select a transfer request signal in a channel configuration object.
The channel uses the transfer request signal to pace its data transfer rate. Sources for TREQ signals are internal
(TIMERS) or external (DREQ, a Data Request from the system). 0x0 to 0x3a -> select DREQ n as TREQ 0x3b -> Select
Timer 0 as TREQ 0x3c -> Select Timer 1 as TREQ 0x3d -> Select Timer 2 as TREQ (Optional) 0x3e -> Select Timer 3 as
TREQ (Optional) 0x3f -> Permanent request, for unpaced transfers.
Parameters
c
Pointer to channel configuration data
dreq
Source (see description)
channel_config_set_enable
static void channel_config_set_enable (dma_channel_config * c, bool enable) [inline], [static]
Enable/Disable the DMA channel in a channel configuration object.
When false, the channel will ignore triggers, stop issuing transfers, and pause the current transfer sequence (i.e. BUSY
will remain high if already high)
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 129

c
Pointer to channel configuration object
enable
True to enable the DMA channel. When enabled, the channel will respond to triggering events, and start
transferring data.
channel_config_set_high_priority
static void channel_config_set_high_priority (dma_channel_config * c, bool high_priority) [inline], [static]
Set the channel priority in a channel configuration object.
When true, gives a channel preferential treatment in issue scheduling: in each scheduling round, all high priority
channels are considered first, and then only a single low priority channel, before returning to the high priority channels.
This only affects the order in which the DMA schedules channels. The DMA’s bus priority is not changed. If the DMA is
not saturated then a low priority channel will see no loss of throughput.
Parameters
c
Pointer to channel configuration object
high_priority
True to enable high priority
channel_config_set_irq_quiet
static void channel_config_set_irq_quiet (dma_channel_config * c, bool irq_quiet) [inline], [static]
Set IRQ quiet mode in a channel configuration object.
In QUIET mode, the channel does not generate IRQs at the end of every transfer block. Instead, an IRQ is raised when
NULL is written to a trigger register, indicating the end of a control block chain.
Parameters
c
Pointer to channel configuration object
irq_quiet
True to enable quiet mode, false to disable.
channel_config_set_read_increment
static void channel_config_set_read_increment (dma_channel_config * c, bool incr) [inline], [static]
Set DMA channel read increment in a channel configuration object.
Parameters
c
Pointer to channel configuration object
incr
True to enable read address increments, if false, each read will be from the same address Usually
disabled for peripheral to memory transfers
channel_config_set_ring
static void channel_config_set_ring (dma_channel_config * c, bool write, uint size_bits) [inline], [static]
Set address wrapping parameters in a channel configuration object.
Size of address wrap region. If 0, don’t wrap. For values n > 0, only the lower n bits of the address will change. This
wraps the address on a (1 << n) byte boundary, facilitating access to naturally-aligned ring buffers. Ring sizes between 2
and 32768 bytes are possible (size_bits from 1 - 15)
0x0 -> No wrapping.
Parameters
c
Pointer to channel configuration object
write
True to apply to write addresses, false to apply to read addresses
size_bits
0 to disable wrapping. Otherwise the size in bits of the changing part of the address. Effectively
wraps the address on a (1 << size_bits) byte boundary.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 130

channel_config_set_sniff_enable
static void channel_config_set_sniff_enable (dma_channel_config * c, bool sniff_enable) [inline], [static]
Enable access to channel by sniff hardware in a channel configuration object.
Sniff HW must be enabled and have this channel selected.
Parameters
c
Pointer to channel configuration object
sniff_enable
True to enable the Sniff HW access to this DMA channel.
channel_config_set_transfer_data_size
static void channel_config_set_transfer_data_size (dma_channel_config * c, enum dma_channel_transfer_size size) [inline],
[static]
Set the size of each DMA bus transfer in a channel configuration object.
Set the size of each bus transfer (byte/halfword/word). The read and write addresses advance by the specific amount
(1/2/4 bytes) with each transfer.
Parameters
c
Pointer to channel configuration object
size
See enum for possible values.
channel_config_set_write_increment
static void channel_config_set_write_increment (dma_channel_config * c, bool incr) [inline], [static]
Set DMA channel write increment in a channel configuration object.
Parameters
c
Pointer to channel configuration object
incr
True to enable write address increments, if false, each write will be to the same address Usually disabled
for memory to peripheral transfers
dma_channel_get_default_config
static dma_channel_config dma_channel_get_default_config (uint channel) [inline], [static]
Get the default channel configuration for a given channel.
Setting Default
Read Increment true
Write Increment false
DReq DREQ_FORCE
Chain to self
Data size DMA_SIZE_32
Ring write=false, size=0 (i.e. off)
Byte Swap false
Quiet IRQs false
High Priority false
Channel Enable true
Sniff Enable false
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 131

Parameters
channel
DMA channel
Returns
the default configuration which can then be modified.
dma_get_channel_config
static dma_channel_config dma_get_channel_config (uint channel) [inline], [static]
Get the current configuration for the specified channel.
Parameters
channel
DMA channel
Returns
The current configuration as read from the HW register (not cached)
4.1.8. hardware_exception
Methods for setting processor exception handlers.
4.1.8.1. Detailed Description
Exceptions are identified by a exception_number which is a number from -15 to -1; these are the numbers relative to the
index of the first IRQ vector in the vector table. (i.e. vector table index is exception_num plus 16)
There is one set of exception handlers per core, so the exception handlers for each core as set by these methods are
independent.
NOTE
That all exception APIs affect the executing core only (i.e. the core calling the function).
4.1.8.2. Typedefs
typedef void(* exception_handler_t)(void)
Exception handler function type.
4.1.8.3. Enumerations
enum exception_number { MIN_EXCEPTION_NUM = 2, NMI_EXCEPTION = 2, HARDFAULT_EXCEPTION = 3, SVCALL_EXCEPTION = 11,
PENDSV_EXCEPTION = 14, SYSTICK_EXCEPTION = 15, MAX_EXCEPTION_NUM = 15 }
Exception number definitions.
4.1.8.4. Functions
exception_handler_t exception_set_exclusive_handler (enum exception_number num, exception_handler_t handler)
Set the exception handler for an exception on the executing core.
void exception_restore_handler (enum exception_number num, exception_handler_t original_handler)
Restore the original exception handler for an exception on this core.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 132

exception_handler_t exception_get_vtable_handler (enum exception_number num)
Get the current exception handler for the specified exception from the currently installed vector table of the
execution core.
bool exception_set_priority (uint num, uint8_t hardware_priority)
Set specified exception’s priority.
uint exception_get_priority (uint num)
Get specified exception’s priority.
4.1.8.5. Typedef Documentation
4.1.8.5.1. exception_handler_t
typedef void(* exception_handler_t) (void)
Exception handler function type.
All exception handlers should be of this type, and follow normal ARM EABI register saving conventions
4.1.8.6. Enumeration Type Documentation
4.1.8.6.1. exception_number
enum exception_number
Exception number definitions.
On Arm these are vector table indices:
Name Value Exception
NMI_EXCEPTION 2 Non Maskable Interrupt
HARDFAULT_EXCEPTION 3 HardFault
SVCALL_EXCEPTION 11 SV Call
PENDSV_EXCEPTION 14 Pend SV
SYSTICK_EXCEPTION 15 System Tick
On RISC-V these are exception cause numbers:
Name Value Exception
INSTR_ALIGN_EXCEPTION 0 Instruction fetch misaligned
INSTR_FAULT_EXCEPTION 1 Instruction fetch bus fault
INSTR_ILLEGAL_EXCEPTION 2 Invalid or illegal instruction
EBREAK_EXCEPTION 3 ebreak was not caught by an ex
LOAD_ALIGN_EXCEPTION 4 Load address not naturally ali
LOAD_FAULT_EXCEPTION 5 Load bus fault
STORE_ALIGN_EXCEPTION 6 Store or AMO address not natur
STORE_FAULT_EXCEPTION 7 Store or AMO bus fault
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 133

Name Value Exception
ECALL_UMODE_EXCEPTION 8 ecall was executed in U-mode
ECALL_SMODE_EXCEPTION 9 ecall was executed in S-mode
ECALL_MMODE_EXCEPTION 11 ecall was executed in M-mode
Table 16. Enumerator
NMI_EXCEPTION
Non Maskable Interrupt.
HARDFAULT_EXCEPTION
HardFault Interrupt.
SVCALL_EXCEPTION
SV Call Interrupt.
PENDSV_EXCEPTION
Pend SV Interrupt.
SYSTICK_EXCEPTION
System Tick Interrupt.
4.1.8.7. Function Documentation
4.1.8.7.1. exception_get_priority
uint exception_get_priority (uint num)
Get specified exception’s priority.
Numerically-lower values indicate a higher priority. Hardware priorities range from 0 (highest priority) to 255 (lowest
priority).
Only the top 2 bits are significant on ARM Cortex-M0+ on RP2040.
Only the top 4 bits are significant on ARM Cortex-M33 on RP2350, and exception priorities are not supported on RISC-V
Parameters
num
Exception number exception_number
Returns
the exception priority
4.1.8.7.2. exception_get_vtable_handler
exception_handler_t exception_get_vtable_handler (enum exception_number num)
Get the current exception handler for the specified exception from the currently installed vector table of the execution
core.
Parameters
num
Exception number
Returns
the address stored in the VTABLE for the given exception number
4.1.8.7.3. exception_restore_handler
void exception_restore_handler (enum exception_number num, exception_handler_t original_handler)
Restore the original exception handler for an exception on this core.
This method may be used to restore the exception handler for an exception on this core to the state prior to the call to
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 134

exception_set_exclusive_handler(), so that exception_set_exclusive_handler() may be called again in the future.
Parameters
num
Exception number exception_number
original_handler
The original handler returned from exception_set_exclusive_handler
See also
exception_set_exclusive_handler()
4.1.8.7.4. exception_set_exclusive_handler
exception_handler_t exception_set_exclusive_handler (enum exception_number num, exception_handler_t handler)
Set the exception handler for an exception on the executing core.
This method will assert if an exception handler has been set for this exception number on this core via this method,
without an intervening restore via exception_restore_handler.
NOTE
this method may not be used to override an exception handler that was specified at link time by providing a strong
replacement for the weakly defined stub exception handlers. It will assert in this case too.
Parameters
num
Exception number
handler
The handler to set
See also
exception_number
4.1.8.7.5. exception_set_priority
bool exception_set_priority (uint num, uint8_t hardware_priority)
Set specified exception’s priority.
Parameters
num
Exception number exception_number
hardware_priority
Priority to set.
Numerically-lower values indicate a higher priority. Hardware priorities range from 0 (highest priority) to 255 (lowest
priority).
Only the top 2 bits are significant on ARM Cortex-M0+ on RP2040.
Only the top 4 bits are significant on ARM Cortex-M33 on RP2350, and exception priorities are not supported on RISC-V
4.1.9. hardware_flash
Low level flash programming and erase API.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 135

4.1.9.1. Detailed Description
Note these functions are unsafe if you are using both cores, and the other is executing from flash concurrently with the
operation. In this could be the case, you must perform your own synchronisation to make sure that no XIP accesses
take place during flash programming. One option is to use the lockout functions.
Likewise they are unsafe if you have interrupt handlers or an interrupt vector table in flash, so you must disable
interrupts before calling in this case.
If PICO_NO_FLASH=1 is not defined (i.e. if the program is built to run from flash) then these functions will make a static
copy of the second stage bootloader in SRAM, and use this to reenter execute-in-place mode after programming or
erasing flash, so that they can safely be called from flash-resident code.
4.1.9.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include <stdlib.h>
Ê3
Ê4 #include "pico/stdlib.h"
Ê5 #include "hardware/flash.h"
Ê6
Ê7 // We're going to erase and reprogram a region 256k from the start of flash.
Ê8 // Once done, we can access this at XIP_BASE + 256k.
Ê9 #define FLASH_TARGET_OFFSET (256 * 1024)
10
11 const uint8_t *flash_target_contents = (const uint8_t *) (XIP_BASE + FLASH_TARGET_OFFSET);
12
13 void print_buf(const uint8_t *buf, size_t len) {
14 for (size_t i = 0; i < len; ++i) {
15 printf("%02x", buf[i]);
16 if (i % 16 == 15)
17 printf("\n");
18 else
19 printf(" ");
20 }
21 }
22
23 int main() {
24 stdio_init_all();
25 uint8_t random_data[FLASH_PAGE_SIZE];
26 for (uint i = 0; i < FLASH_PAGE_SIZE; ++i)
27 random_data[i] = rand() >> 16;
28
29 printf("Generated random data:\n");
30 print_buf(random_data, FLASH_PAGE_SIZE);
31
32 // Note that a whole number of sectors must be erased at a time.
33 printf("\nErasing target region...\n");
34 flash_range_erase(FLASH_TARGET_OFFSET, FLASH_SECTOR_SIZE);
35 printf("Done. Read back target region:\n");
36 print_buf(flash_target_contents, FLASH_PAGE_SIZE);
37
38 printf("\nProgramming target region...\n");
39 flash_range_program(FLASH_TARGET_OFFSET, random_data, FLASH_PAGE_SIZE);
40 printf("Done. Read back target region:\n");
41 print_buf(flash_target_contents, FLASH_PAGE_SIZE);
42
43 bool mismatch = false;
44 for (uint i = 0; i < FLASH_PAGE_SIZE; ++i) {
45 if (random_data[i] != flash_target_contents[i])
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 136

46 mismatch = true;
47 }
48 if (mismatch)
49 printf("Programming failed!\n");
50 else
51 printf("Programming successful!\n");
52 }
4.1.9.2. Functions
void flash_range_erase (uint32_t flash_offs, size_t count)
Erase areas of flash.
void flash_range_program (uint32_t flash_offs, const uint8_t *data, size_t count)
Program flash.
void flash_get_unique_id (uint8_t *id_out)
Get flash unique 64 bit identifier.
void flash_do_cmd (const uint8_t *txbuf, uint8_t *rxbuf, size_t count)
Execute bidirectional flash command.
4.1.9.3. Function Documentation
4.1.9.3.1. flash_do_cmd
void flash_do_cmd (const uint8_t * txbuf, uint8_t * rxbuf, size_t count)
Execute bidirectional flash command.
Low-level function to execute a serial command on a flash device attached to the QSPI interface. Bytes are
simultaneously transmitted and received from txbuf and to rxbuf. Therefore, both buffers must be the same length,
count, which is the length of the overall transaction. This is useful for reading metadata from the flash chip, such as
device ID or SFDP parameters.
The XIP cache is flushed following each command, in case flash state has been modified. Like other hardware_flash
functions, the flash is not accessible for execute-in-place transfers whilst the command is in progress, so entering a
flash-resident interrupt handler or executing flash code on the second core concurrently will be fatal. To avoid these
pitfalls it is recommended that this function only be used to extract flash metadata during startup, before the main
application begins to run: see the implementation of pico_get_unique_id() for an example of this.
Parameters
txbuf
Pointer to a byte buffer which will be transmitted to the flash
rxbuf
Pointer to a byte buffer where data received from the flash will be written. txbuf and rxbuf may be the
same buffer.
count
Length in bytes of txbuf and of rxbuf
4.1.9.3.2. flash_get_unique_id
void flash_get_unique_id (uint8_t * id_out)
Get flash unique 64 bit identifier.
Use a standard 4Bh RUID instruction to retrieve the 64 bit unique identifier from a flash device attached to the QSPI
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 137

interface. Since there is a 1:1 association between the MCU and this flash, this also serves as a unique identifier for the
board.
Parameters
id_out
Pointer to an 8-byte buffer to which the ID will be written
4.1.9.3.3. flash_range_erase
void flash_range_erase (uint32_t flash_offs, size_t count)
Erase areas of flash.
Parameters
flash_offs
Offset into flash, in bytes, to start the erase. Must be aligned to a 4096-byte flash sector.
count
Number of bytes to be erased. Must be a multiple of 4096 bytes (one sector).
NOTE
Erasing a flash sector sets all the bits in all the pages in that sector to one. You can then "program" flash pages in
the sector to turn some of the bits to zero. Once a bit is set to zero it can only be changed back to one by erasing the
whole sector again.
4.1.9.3.4. flash_range_program
void flash_range_program (uint32_t flash_offs, const uint8_t * data, size_t count)
Program flash.
Parameters
flash_offs
Flash address of the first byte to be programmed. Must be aligned to a 256-byte flash page.
data
Pointer to the data to program into flash
count
Number of bytes to program. Must be a multiple of 256 bytes (one page).
NOTE
: Programming a flash page effectively changes some of the bits from one to zero. The only way to change a zero bit
back to one is to "erase" the whole sector that the page resides in. So you may need to make sure you have called
flash_range_erase before calling flash_range_program.
4.1.10. hardware_gpio
General Purpose Input/Output (GPIO) API.
4.1.10.1. Detailed Description
RP-series microcontrollers have two banks of General Purpose Input / Output (GPIO) pins, which are assigned as
follows:
All GPIOs support digital input and output, but a subset can also be used as inputs to the chip’s Analogue to Digital
Converter (ADC). The allocation of GPIO pins to the ADC depends on the packaging.
RP2040 and RP2350 QFN-60 GPIO, ADC pins are 26-29. RP2350 QFN-80, ADC pins are 40-47.
Each GPIO can be controlled directly by software running on the processors, or by a number of other functional blocks.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 138

The function allocated to each GPIO is selected by calling the gpio_set_function function.
NOTE
Not all functions are available on all pins.
Each GPIO can have one function selected at a time. Likewise, each peripheral input (e.g. UART0 RX) should only be
selected on one GPIO at a time. If the same peripheral input is connected to multiple GPIOs, the peripheral sees the
logical OR of these GPIO inputs. Please refer to the datasheet for more information on GPIO function select.
4.1.10.1.1. Function Select Table
On RP2040 the function selects are:
GPIO F1 F2 F3 F4 F5 F6 F7 F8 F9
0 SPI0 RX UART0 TX I2C0 SDA PWM0 A SIO PIO0 PIO1 USB
OVCUR
DET
1 SPI0 CSn UART0 RX I2C0 SCL PWM0 B SIO PIO0 PIO1 USB VBUS
DET
2 SPI0 SCK UART0
CTS
I2C1 SDA PWM1 A SIO PIO0 PIO1 USB VBUS
EN
3 SPI0 TX UART0
RTS
I2C1 SCL PWM1 B SIO PIO0 PIO1 USB
OVCUR
DET
4 SPI0 RX UART1 TX I2C0 SDA PWM2 A SIO PIO0 PIO1 USB VBUS
DET
5 SPI0 CSn UART1 RX I2C0 SCL PWM2 B SIO PIO0 PIO1 USB VBUS
EN
6 SPI0 SCK UART1
CTS
I2C1 SDA PWM3 A SIO PIO0 PIO1 USB
OVCUR
DET
7 SPI0 TX UART1
RTS
I2C1 SCL PWM3 B SIO PIO0 PIO1 USB VBUS
DET
8 SPI1 RX UART1 TX I2C0 SDA PWM4 A SIO PIO0 PIO1 USB VBUS
EN
9 SPI1 CSn UART1 RX I2C0 SCL PWM4 B SIO PIO0 PIO1 USB
OVCUR
DET
10 SPI1 SCK UART1
CTS
I2C1 SDA PWM5 A SIO PIO0 PIO1 USB VBUS
DET
11 SPI1 TX UART1
RTS
I2C1 SCL PWM5 B SIO PIO0 PIO1 USB VBUS
EN
12 SPI1 RX UART0 TX I2C0 SDA PWM6 A SIO PIO0 PIO1 USB
OVCUR
DET
13 SPI1 CSn UART0 RX I2C0 SCL PWM6 B SIO PIO0 PIO1 USB VBUS
DET
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 139

GPIO F1 F2 F3 F4 F5 F6 F7 F8 F9
14 SPI1 SCK UART0
CTS
I2C1 SDA PWM7 A SIO PIO0 PIO1 USB VBUS
EN
15 SPI1 TX UART0
RTS
I2C1 SCL PWM7 B SIO PIO0 PIO1 USB
OVCUR
DET
16 SPI0 RX UART0 TX I2C0 SDA PWM0 A SIO PIO0 PIO1 USB VBUS
DET
17 SPI0 CSn UART0 RX I2C0 SCL PWM0 B SIO PIO0 PIO1 USB VBUS
EN
18 SPI0 SCK UART0
CTS
I2C1 SDA PWM1 A SIO PIO0 PIO1 USB
OVCUR
DET
19 SPI0 TX UART0
RTS
I2C1 SCL PWM1 B SIO PIO0 PIO1 USB VBUS
DET
20 SPI0 RX UART1 TX I2C0 SDA PWM2 A SIO PIO0 PIO1 CLOCK
GPIN0
USB VBUS
EN
21 SPI0 CSn UART1 RX I2C0 SCL PWM2 B SIO PIO0 PIO1 CLOCK
GPOUT0
USB
OVCUR
DET
22 SPI0 SCK UART1
CTS
I2C1 SDA PWM3 A SIO PIO0 PIO1 CLOCK
GPIN1
USB VBUS
DET
23 SPI0 TX UART1
RTS
I2C1 SCL PWM3 B SIO PIO0 PIO1 CLOCK
GPOUT1
USB VBUS
EN
24 SPI1 RX UART1 TX I2C0 SDA PWM4 A SIO PIO0 PIO1 CLOCK
GPOUT2
USB
OVCUR
DET
25 SPI1 CSn UART1 RX I2C0 SCL PWM4 B SIO PIO0 PIO1 CLOCK
GPOUT3
USB VBUS
DET
26 SPI1 SCK UART1
CTS
I2C1 SDA PWM5 A SIO PIO0 PIO1 USB VBUS
EN
27 SPI1 TX UART1
RTS
I2C1 SCL PWM5 B SIO PIO0 PIO1 USB
OVCUR
DET
28 SPI1 RX UART0 TX I2C0 SDA PWM6 A SIO PIO0 PIO1 USB VBUS
DET
29 SPI1 CSn UART0 RX I2C0 SCL PWM6 B SIO PIO0 PIO1 USB VBUS
EN
On RP2350 the function selects are:
GPIO F0 F1 F2 F3 F4 F5 F6 F7 F8 F9 F10 F11
0 SPI0
RX
UART0
TX
I2C0
SDA
PWM0
A
SIO PIO0 PIO1 PIO2 XIP_CS
1n
USB
OVCUR
DET
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 140

GPIO F0 F1 F2 F3 F4 F5 F6 F7 F8 F9 F10 F11
1 SPI0
CSn
UART0
RX
I2C0
SCL
PWM0
B
SIO PIO0 PIO1 PIO2 TRACE
CLK
USB
VBUS
DET
2 SPI0
SCK
UART0
CTS
I2C1
SDA
PWM1
A
SIO PIO0 PIO1 PIO2 TRACE
DATA0
USB
VBUS
EN
UART0
TX
3 SPI0
TX
UART0
RTS
I2C1
SCL
PWM1
B
SIO PIO0 PIO1 PIO2 TRACE
DATA1
USB
OVCUR
DET
UART0
RX
4 SPI0
RX
UART1
TX
I2C0
SDA
PWM2
A
SIO PIO0 PIO1 PIO2 TRACE
DATA2
USB
VBUS
DET
5 SPI0
CSn
UART1
RX
I2C0
SCL
PWM2
B
SIO PIO0 PIO1 PIO2 TRACE
DATA3
USB
VBUS
EN
6 SPI0
SCK
UART1
CTS
I2C1
SDA
PWM3
A
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART1
TX
7 SPI0
TX
UART1
RTS
I2C1
SCL
PWM3
B
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART1
RX
8 SPI1
RX
UART1
TX
I2C0
SDA
PWM4
A
SIO PIO0 PIO1 PIO2 XIP_CS
1n
USB
VBUS
EN
9 SPI1
CSn
UART1
RX
I2C0
SCL
PWM4
B
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
10 SPI1
SCK
UART1
CTS
I2C1
SDA
PWM5
A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART1
TX
11 SPI1
TX
UART1
RTS
I2C1
SCL
PWM5
B
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
UART1
RX
12 HSTX SPI1
RX
UART0
TX
I2C0
SDA
PWM6
A
SIO PIO0 PIO1 PIO2 CLOCK
GPIN0
USB
OVCUR
DET
13 HSTX SPI1
CSn
UART0
RX
I2C0
SCL
PWM6
B
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
0
USB
VBUS
DET
14 HSTX SPI1
SCK
UART0
CTS
I2C1
SDA
PWM7
A
SIO PIO0 PIO1 PIO2 CLOCK
GPIN1
USB
VBUS
EN
UART0
TX
15 HSTX SPI1
TX
UART0
RTS
I2C1
SCL
PWM7
B
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
1
USB
OVCUR
DET
UART0
RX
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 141

GPIO F0 F1 F2 F3 F4 F5 F6 F7 F8 F9 F10 F11
16 HSTX SPI0
RX
UART0
TX
I2C0
SDA
PWM0
A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
17 HSTX SPI0
CSn
UART0
RX
I2C0
SCL
PWM0
B
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
18 HSTX SPI0
SCK
UART0
CTS
I2C1
SDA
PWM1
A
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART0
TX
19 HSTX SPI0
TX
UART0
RTS
I2C1
SCL
PWM1
B
SIO PIO0 PIO1 PIO2 XIP_CS
1n
USB
VBUS
DET
UART0
RX
20 SPI0
RX
UART1
TX
I2C0
SDA
PWM2
A
SIO PIO0 PIO1 PIO2 CLOCK
GPIN0
USB
VBUS
EN
21 SPI0
CSn
UART1
RX
I2C0
SCL
PWM2
B
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
0
USB
OVCUR
DET
22 SPI0
SCK
UART1
CTS
I2C1
SDA
PWM3
A
SIO PIO0 PIO1 PIO2 CLOCK
GPIN1
USB
VBUS
DET
UART1
TX
23 SPI0
TX
UART1
RTS
I2C1
SCL
PWM3
B
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
1
USB
VBUS
EN
UART1
RX
24 SPI1
RX
UART1
TX
I2C0
SDA
PWM4
A
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
2
USB
OVCUR
DET
25 SPI1
CSn
UART1
RX
I2C0
SCL
PWM4
B
SIO PIO0 PIO1 PIO2 CLOCK
GPOUT
3
USB
VBUS
DET
26 SPI1
SCK
UART1
CTS
I2C1
SDA
PWM5
A
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
UART1
TX
27 SPI1
TX
UART1
RTS
I2C1
SCL
PWM5
B
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART1
RX
28 SPI1
RX
UART0
TX
I2C0
SDA
PWM6
A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
29 SPI1
CSn
UART0
RX
I2C0
SCL
PWM6
B
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
GPIOs 30 through 47 are QFN-80 only:
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 142

GPIO F0 F1 F2 F3 F4 F5 F6 F7 F8 F9 F10 F11
30 SPI1
SCK
UART0
CTS
I2C1
SDA
PWM7
A
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART0
TX
31 SPI1
TX
UART0
RTS
I2C1
SCL
PWM7
B
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART0
RX
32 SPI0
RX
UART0
TX
I2C0
SDA
PWM8
A
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
33 SPI0
CSn
UART0
RX
I2C0
SCL
PWM8
B
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
34 SPI0
SCK
UART0
CTS
I2C1
SDA
PWM9
A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART0
TX
35 SPI0
TX
UART0
RTS
I2C1
SCL
PWM9
B
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
UART0
RX
36 SPI0
RX
UART1
TX
I2C0
SDA
PWM1
0 A
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
37 SPI0
CSn
UART1
RX
I2C0
SCL
PWM1
0 B
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
38 SPI0
SCK
UART1
CTS
I2C1
SDA
PWM1
1 A
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
UART1
TX
39 SPI0
TX
UART1
RTS
I2C1
SCL
PWM1
1 B
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART1
RX
40 SPI1
RX
UART1
TX
I2C0
SDA
PWM8
A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
41 SPI1
CSn
UART1
RX
I2C0
SCL
PWM8
B
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
42 SPI1
SCK
UART1
CTS
I2C1
SDA
PWM9
A
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
UART1
TX
43 SPI1
TX
UART1
RTS
I2C1
SCL
PWM9
B
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART1
RX
44 SPI1
RX
UART0
TX
I2C0
SDA
PWM1
0 A
SIO PIO0 PIO1 PIO2 USB
VBUS
EN
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 143

GPIO F0 F1 F2 F3 F4 F5 F6 F7 F8 F9 F10 F11
45 SPI1
CSn
UART0
RX
I2C0
SCL
PWM1
0 B
SIO PIO0 PIO1 PIO2 USB
OVCUR
DET
46 SPI1
SCK
UART0
CTS
I2C1
SDA
PWM1
1 A
SIO PIO0 PIO1 PIO2 USB
VBUS
DET
UART0
TX
47 SPI1
TX
UART0
RTS
I2C1
SCL
PWM1
1 B
SIO PIO0 PIO1 PIO2 XIP_CS
1n
USB
VBUS
EN
UART0
RX
4.1.10.2. Typedefs
typedef enum gpio_function_rp2040 gpio_function_t
GPIO pin function selectors on RP2040 (used as typedef gpio_function_t)
typedef enum gpio_function_rp2350 gpio_function_t
GPIO pin function selectors on RP2350 (used as typedef gpio_function_t)
typedef void(* gpio_irq_callback_t)(uint gpio, uint32_t event_mask)
4.1.10.3. Enumerations
enum gpio_function_rp2040 { GPIO_FUNC_XIP = 0, GPIO_FUNC_SPI = 1, GPIO_FUNC_UART = 2, GPIO_FUNC_I2C = 3, GPIO_FUNC_PWM =
4, GPIO_FUNC_SIO = 5, GPIO_FUNC_PIO0 = 6, GPIO_FUNC_PIO1 = 7, GPIO_FUNC_GPCK = 8, GPIO_FUNC_USB = 9, GPIO_FUNC_NULL =
0x1f }
GPIO pin function selectors on RP2040 (used as typedef gpio_function_t)
enum gpio_function_rp2350 { GPIO_FUNC_HSTX = 0, GPIO_FUNC_SPI = 1, GPIO_FUNC_UART = 2, GPIO_FUNC_I2C = 3, GPIO_FUNC_PWM =
4, GPIO_FUNC_SIO = 5, GPIO_FUNC_PIO0 = 6, GPIO_FUNC_PIO1 = 7, GPIO_FUNC_PIO2 = 8, GPIO_FUNC_GPCK = 9, GPIO_FUNC_XIP_CS1 =
9, GPIO_FUNC_CORESIGHT_TRACE = 9, GPIO_FUNC_USB = 10, GPIO_FUNC_UART_AUX = 11, GPIO_FUNC_NULL = 0x1f }
GPIO pin function selectors on RP2350 (used as typedef gpio_function_t)
enum gpio_irq_level { GPIO_IRQ_LEVEL_LOW = 0x1u, GPIO_IRQ_LEVEL_HIGH = 0x2u, GPIO_IRQ_EDGE_FALL = 0x4u,
GPIO_IRQ_EDGE_RISE = 0x8u }
GPIO Interrupt level definitions (GPIO events)
enum gpio_slew_rate { GPIO_SLEW_RATE_SLOW = 0, GPIO_SLEW_RATE_FAST = 1 }
Slew rate limiting levels for GPIO outputs.
enum gpio_drive_strength { GPIO_DRIVE_STRENGTH_2MA = 0, GPIO_DRIVE_STRENGTH_4MA = 1, GPIO_DRIVE_STRENGTH_8MA = 2,
GPIO_DRIVE_STRENGTH_12MA = 3 }
Drive strength levels for GPIO outputs.
4.1.10.4. Functions
void gpio_set_function (uint gpio, gpio_function_t fn)
Select GPIO function.
void gpio_set_function_masked (uint32_t gpio_mask, gpio_function_t fn)
Select the function for multiple GPIOs.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 144

void gpio_set_function_masked64 (uint64_t gpio_mask, gpio_function_t fn)
Select the function for multiple GPIOs.
gpio_function_t gpio_get_function (uint gpio)
Determine current GPIO function.
void gpio_set_pulls (uint gpio, bool up, bool down)
Select up and down pulls on specific GPIO.
static void gpio_pull_up (uint gpio)
Set specified GPIO to be pulled up.
static bool gpio_is_pulled_up (uint gpio)
Determine if the specified GPIO is pulled up.
static void gpio_pull_down (uint gpio)
Set specified GPIO to be pulled down.
static bool gpio_is_pulled_down (uint gpio)
Determine if the specified GPIO is pulled down.
static void gpio_disable_pulls (uint gpio)
Disable pulls on specified GPIO.
void gpio_set_irqover (uint gpio, uint value)
Set GPIO IRQ override.
void gpio_set_outover (uint gpio, uint value)
Set GPIO output override.
void gpio_set_inover (uint gpio, uint value)
Select GPIO input override.
void gpio_set_oeover (uint gpio, uint value)
Select GPIO output enable override.
void gpio_set_input_enabled (uint gpio, bool enabled)
Enable GPIO input.
void gpio_set_input_hysteresis_enabled (uint gpio, bool enabled)
Enable/disable GPIO input hysteresis (Schmitt trigger)
bool gpio_is_input_hysteresis_enabled (uint gpio)
Determine whether input hysteresis is enabled on a specified GPIO.
void gpio_set_slew_rate (uint gpio, enum gpio_slew_rate slew)
Set slew rate for a specified GPIO.
enum gpio_slew_rate gpio_get_slew_rate (uint gpio)
Determine current slew rate for a specified GPIO.
void gpio_set_drive_strength (uint gpio, enum gpio_drive_strength drive)
Set drive strength for a specified GPIO.
enum gpio_drive_strength gpio_get_drive_strength (uint gpio)
Determine current drive strength for a specified GPIO.
void gpio_set_irq_enabled (uint gpio, uint32_t event_mask, bool enabled)
Enable or disable specific interrupt events for specified GPIO.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 145

void gpio_set_irq_callback (gpio_irq_callback_t callback)
Set the generic callback used for GPIO IRQ events for the current core.
void gpio_set_irq_enabled_with_callback (uint gpio, uint32_t event_mask, bool enabled, gpio_irq_callback_t callback)
Convenience function which performs multiple GPIO IRQ related initializations.
void gpio_set_dormant_irq_enabled (uint gpio, uint32_t event_mask, bool enabled)
Enable dormant wake up interrupt for specified GPIO and events.
static uint32_t gpio_get_irq_event_mask (uint gpio)
Return the current interrupt status (pending events) for the given GPIO.
void gpio_acknowledge_irq (uint gpio, uint32_t event_mask)
Acknowledge a GPIO interrupt for the specified events on the calling core.
void gpio_add_raw_irq_handler_with_order_priority_masked (uint32_t gpio_mask, irq_handler_t handler, uint8_t
order_priority)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
void gpio_add_raw_irq_handler_with_order_priority_masked64 (uint64_t gpio_mask, irq_handler_t handler, uint8_t
order_priority)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
static void gpio_add_raw_irq_handler_with_order_priority (uint gpio, irq_handler_t handler, uint8_t order_priority)
Adds a raw GPIO IRQ handler for a specific GPIO on the current core.
void gpio_add_raw_irq_handler_masked (uint32_t gpio_mask, irq_handler_t handler)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
void gpio_add_raw_irq_handler_masked64 (uint64_t gpio_mask, irq_handler_t handler)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
static void gpio_add_raw_irq_handler (uint gpio, irq_handler_t handler)
Adds a raw GPIO IRQ handler for a specific GPIO on the current core.
void gpio_remove_raw_irq_handler_masked (uint32_t gpio_mask, irq_handler_t handler)
Removes a raw GPIO IRQ handler for the specified GPIOs on the current core.
void gpio_remove_raw_irq_handler_masked64 (uint64_t gpio_mask, irq_handler_t handler)
Removes a raw GPIO IRQ handler for the specified GPIOs on the current core.
static void gpio_remove_raw_irq_handler (uint gpio, irq_handler_t handler)
Removes a raw GPIO IRQ handler for the specified GPIO on the current core.
void gpio_init (uint gpio)
Initialise a GPIO for (enabled I/O and set func to GPIO_FUNC_SIO)
void gpio_deinit (uint gpio)
Resets a GPIO back to the NULL function, i.e. disables it.
void gpio_init_mask (uint gpio_mask)
Initialise multiple GPIOs (enabled I/O and set func to GPIO_FUNC_SIO)
static bool gpio_get (uint gpio)
Get state of a single specified GPIO.
static uint32_t gpio_get_all (void)
Get raw value of all GPIOs.
static uint64_t gpio_get_all64 (void)
Get raw value of all GPIOs.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 146

static void gpio_set_mask (uint32_t mask)
Drive high every GPIO appearing in mask.
static void gpio_set_mask64 (uint64_t mask)
Drive high every GPIO appearing in mask.
static void gpio_set_mask_n (uint n, uint32_t mask)
Drive high every GPIO appearing in mask.
static void gpio_clr_mask (uint32_t mask)
Drive low every GPIO appearing in mask.
static void gpio_clr_mask64 (uint64_t mask)
Drive low every GPIO appearing in mask.
static void gpio_clr_mask_n (uint n, uint32_t mask)
Drive low every GPIO appearing in mask.
static void gpio_xor_mask (uint32_t mask)
Toggle every GPIO appearing in mask.
static void gpio_xor_mask64 (uint64_t mask)
Toggle every GPIO appearing in mask.
static void gpio_xor_mask_n (uint n, uint32_t mask)
Toggle every GPIO appearing in mask.
static void gpio_put_masked (uint32_t mask, uint32_t value)
Drive GPIOs high/low depending on parameters.
static void gpio_put_masked64 (uint64_t mask, uint64_t value)
Drive GPIOs high/low depending on parameters.
static void gpio_put_masked_n (uint n, uint32_t mask, uint32_t value)
Drive GPIOs high/low depending on parameters.
static void gpio_put_all (uint32_t value)
Drive all pins simultaneously.
static void gpio_put_all64 (uint64_t value)
Drive all pins simultaneously.
static void gpio_put (uint gpio, bool value)
Drive a single GPIO high/low.
static bool gpio_get_out_level (uint gpio)
Determine whether a GPIO is currently driven high or low.
static void gpio_set_dir_out_masked (uint32_t mask)
Set a number of GPIOs to output.
static void gpio_set_dir_out_masked64 (uint64_t mask)
Set a number of GPIOs to output.
static void gpio_set_dir_in_masked (uint32_t mask)
Set a number of GPIOs to input.
static void gpio_set_dir_in_masked64 (uint64_t mask)
Set a number of GPIOs to input.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 147

static void gpio_set_dir_masked (uint32_t mask, uint32_t value)
Set multiple GPIO directions.
static void gpio_set_dir_masked64 (uint64_t mask, uint64_t value)
Set multiple GPIO directions.
static void gpio_set_dir_all_bits (uint32_t values)
Set direction of all pins simultaneously.
static void gpio_set_dir_all_bits64 (uint64_t values)
Set direction of all pins simultaneously.
static void gpio_set_dir (uint gpio, bool out)
Set a single GPIO direction.
static bool gpio_is_dir_out (uint gpio)
Check if a specific GPIO direction is OUT.
static uint gpio_get_dir (uint gpio)
Get a specific GPIO direction.
4.1.10.5. Typedef Documentation
4.1.10.5.1. gpio_function_t
typedef enum gpio_function_rp2040 gpio_function_t
GPIO pin function selectors on RP2040 (used as typedef gpio_function_t)
4.1.10.5.2. gpio_function_t
typedef enum gpio_function_rp2350 gpio_function_t
GPIO pin function selectors on RP2350 (used as typedef gpio_function_t)
4.1.10.5.3. gpio_irq_callback_t
typedef void(* gpio_irq_callback_t) (uint gpio, uint32_t event_mask)
Callback function type for GPIO events
Parameters
gpio
Which GPIO caused this interrupt
event_mask
Which events caused this interrupt. See gpio_irq_level for details.
See also
gpio_set_irq_enabled_with_callback()
gpio_set_irq_callback()
4.1.10.6. Enumeration Type Documentation
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 148

4.1.10.6.1. gpio_function_rp2040
enum gpio_function_rp2040
GPIO pin function selectors on RP2040 (used as typedef gpio_function_t)
Table 17. Enumerator
GPIO_FUNC_XIP
Select XIP as GPIO pin function.
GPIO_FUNC_SPI
Select SPI as GPIO pin function.
GPIO_FUNC_UART
Select UART as GPIO pin function.
GPIO_FUNC_I2C
Select I2C as GPIO pin function.
GPIO_FUNC_PWM
Select PWM as GPIO pin function.
GPIO_FUNC_SIO
Select SIO as GPIO pin function.
GPIO_FUNC_PIO0
Select PIO0 as GPIO pin function.
GPIO_FUNC_PIO1
Select PIO1 as GPIO pin function.
GPIO_FUNC_GPCK
Select GPCK as GPIO pin function.
GPIO_FUNC_USB
Select USB as GPIO pin function.
GPIO_FUNC_NULL
Select NULL as GPIO pin function.
4.1.10.6.2. gpio_function_rp2350
enum gpio_function_rp2350
GPIO pin function selectors on RP2350 (used as typedef gpio_function_t)
Table 18. Enumerator
GPIO_FUNC_HSTX
Select HSTX as GPIO pin function.
GPIO_FUNC_SPI
Select SPI as GPIO pin function.
GPIO_FUNC_UART
Select UART as GPIO pin function.
GPIO_FUNC_I2C
Select I2C as GPIO pin function.
GPIO_FUNC_PWM
Select PWM as GPIO pin function.
GPIO_FUNC_SIO
Select SIO as GPIO pin function.
GPIO_FUNC_PIO0
Select PIO0 as GPIO pin function.
GPIO_FUNC_PIO1
Select PIO1 as GPIO pin function.
GPIO_FUNC_PIO2
Select PIO2 as GPIO pin function.
GPIO_FUNC_GPCK
Select GPCK as GPIO pin function.
GPIO_FUNC_XIP_CS1
Select XIP CS1 as GPIO pin function.
GPIO_FUNC_CORESIGHT_TRACE
Select CORESIGHT TRACE as GPIO pin function.
GPIO_FUNC_USB
Select USB as GPIO pin function.
GPIO_FUNC_UART_AUX
Select UART_AUX as GPIO pin function.
GPIO_FUNC_NULL
Select NULL as GPIO pin function.
4.1.10.6.3. gpio_irq_level
enum gpio_irq_level
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 149

GPIO Interrupt level definitions (GPIO events)
GPIO Interrupt levels
An interrupt can be generated for every GPIO pin in 4 scenarios:
•
Level High: the GPIO pin is a logical 1
•
Level Low: the GPIO pin is a logical 0
•
Edge High: the GPIO has transitioned from a logical 0 to a logical 1
•
Edge Low: the GPIO has transitioned from a logical 1 to a logical 0
The level interrupts are not latched. This means that if the pin is a logical 1 and the level high interrupt is active, it will
become inactive as soon as the pin changes to a logical 0. The edge interrupts are stored in the INTR register and can
be cleared by writing to the INTR register.
Table 19. Enumerator
GPIO_IRQ_LEVEL_LOW
IRQ when the GPIO pin is a logical 1.
GPIO_IRQ_LEVEL_HIGH
IRQ when the GPIO pin is a logical 0.
GPIO_IRQ_EDGE_FALL
IRQ when the GPIO has transitioned from a logical 0 to a
logical 1.
GPIO_IRQ_EDGE_RISE
IRQ when the GPIO has transitioned from a logical 1 to a
logical 0.
4.1.10.6.4. gpio_slew_rate
enum gpio_slew_rate
Slew rate limiting levels for GPIO outputs.
Slew rate limiting increases the minimum rise/fall time when a GPIO output is lightly loaded, which can help to reduce
electromagnetic emissions.
See also
gpio_set_slew_rate
Table 20. Enumerator
GPIO_SLEW_RATE_SLOW
Slew rate limiting enabled.
GPIO_SLEW_RATE_FAST
Slew rate limiting disabled.
4.1.10.6.5. gpio_drive_strength
enum gpio_drive_strength
Drive strength levels for GPIO outputs.
Drive strength levels for GPIO outputs.
See also
gpio_set_drive_strength
Table 21. Enumerator
GPIO_DRIVE_STRENGTH_2MA
2 mA nominal drive strength
GPIO_DRIVE_STRENGTH_4MA
4 mA nominal drive strength
GPIO_DRIVE_STRENGTH_8MA
8 mA nominal drive strength
GPIO_DRIVE_STRENGTH_12MA
12 mA nominal drive strength
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 150

4.1.10.7. Function Documentation
4.1.10.7.1. gpio_acknowledge_irq
void gpio_acknowledge_irq (uint gpio, uint32_t event_mask)
Acknowledge a GPIO interrupt for the specified events on the calling core.
NOTE
This may be called with a mask of any of valid bits specified in gpio_irq_level, however it has no effect on level
sensitive interrupts which remain pending while the GPIO is at the specified level. When handling level sensitive
interrupts, you should generally disable the interrupt (see gpio_set_irq_enabled) and then set it up again later once
the GPIO level has changed (or to catch the opposite level).
Parameters
gpio
GPIO number
NOTE
For callbacks set with gpio_set_irq_enabled_with_callback, or gpio_set_irq_callback, this function is called
automatically.
Parameters
event_mask
Bitmask of events to clear. See gpio_irq_level for details.
4.1.10.7.2. gpio_add_raw_irq_handler
static void gpio_add_raw_irq_handler (uint gpio, irq_handler_t handler) [inline], [static]
Adds a raw GPIO IRQ handler for a specific GPIO on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method adds such a callback, and disables the "default" callback for the specified GPIO.
NOTE
Multiple raw handlers should not be added for the same GPIO, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
1 void my_irq_handler(void) {
2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
4 // handle the IRQ
5 }
6 }
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 151

gpio
the GPIO number that will no longer be passed to the default callback for this core
handler
the handler to add to the list of GPIO IRQ handlers for this core
4.1.10.7.3. gpio_add_raw_irq_handler_masked
void gpio_add_raw_irq_handler_masked (uint32_t gpio_mask, irq_handler_t handler)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method adds such a callback, and disables the "default" callback for the specified GPIOs.
NOTE
Multiple raw handlers should not be added for the same GPIOs, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
Ê1 void my_irq_handler(void) {
Ê2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
Ê3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
Ê4 // handle the IRQ
Ê5 }
Ê6 if (gpio_get_irq_event_mask(my_gpio_num2) & my_gpio_event_mask2) {
Ê7 gpio_acknowledge_irq(my_gpio_num2, my_gpio_event_mask2);
Ê8 // handle the IRQ
Ê9 }
10 }
Parameters
gpio_mask
a bit mask of the GPIO numbers that will no longer be passed to the default callback for this core
handler
the handler to add to the list of GPIO IRQ handlers for this core
4.1.10.7.4. gpio_add_raw_irq_handler_masked64
void gpio_add_raw_irq_handler_masked64 (uint64_t gpio_mask, irq_handler_t handler)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method adds such a callback, and disables the "default" callback for the specified GPIOs.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 152

NOTE
Multiple raw handlers should not be added for the same GPIOs, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
Ê1 void my_irq_handler(void) {
Ê2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
Ê3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
Ê4 // handle the IRQ
Ê5 }
Ê6 if (gpio_get_irq_event_mask(my_gpio_num2) & my_gpio_event_mask2) {
Ê7 gpio_acknowledge_irq(my_gpio_num2, my_gpio_event_mask2);
Ê8 // handle the IRQ
Ê9 }
10 }
Parameters
gpio_mask
a 64 bit mask of the GPIO numbers that will no longer be passed to the default callback for this core
handler
the handler to add to the list of GPIO IRQ handlers for this core
4.1.10.7.5. gpio_add_raw_irq_handler_with_order_priority
static void gpio_add_raw_irq_handler_with_order_priority (uint gpio, irq_handler_t handler, uint8_t order_priority)
[inline], [static]
Adds a raw GPIO IRQ handler for a specific GPIO on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default callback. The order relative to the
default callback can be controlled via the order_priority parameter(the default callback has the priority
GPIO_IRQ_CALLBACK_ORDER_PRIORITY which defaults to the lowest priority with the intention of it running last).
This method adds such a callback, and disables the "default" callback for the specified GPIO.
NOTE
Multiple raw handlers should not be added for the same GPIO, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
1 void my_irq_handler(void) {
2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
4 // handle the IRQ
5 }
6 }
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 153

Parameters
gpio
the GPIO number that will no longer be passed to the default callback for this core
handler
the handler to add to the list of GPIO IRQ handlers for this core
order_priority
the priority order to determine the relative position of the handler in the list of GPIO IRQ
handlers for this core.
4.1.10.7.6. gpio_add_raw_irq_handler_with_order_priority_masked
void gpio_add_raw_irq_handler_with_order_priority_masked (uint32_t gpio_mask, irq_handler_t handler, uint8_t
order_priority)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default callback. The order relative to the
default callback can be controlled via the order_priority parameter (the default callback has the priority
GPIO_IRQ_CALLBACK_ORDER_PRIORITY which defaults to the lowest priority with the intention of it running last).
This method adds such an explicit GPIO IRQ handler, and disables the "default" callback for the specified GPIOs.
NOTE
Multiple raw handlers should not be added for the same GPIOs, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
Ê1 void my_irq_handler(void) {
Ê2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
Ê3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
Ê4 // handle the IRQ
Ê5 }
Ê6 if (gpio_get_irq_event_mask(my_gpio_num2) & my_gpio_event_mask2) {
Ê7 gpio_acknowledge_irq(my_gpio_num2, my_gpio_event_mask2);
Ê8 // handle the IRQ
Ê9 }
10 }
Parameters
gpio_mask
a bit mask of the GPIO numbers that will no longer be passed to the default callback for this
core
handler
the handler to add to the list of GPIO IRQ handlers for this core
order_priority
the priority order to determine the relative position of the handler in the list of GPIO IRQ
handlers for this core.
4.1.10.7.7. gpio_add_raw_irq_handler_with_order_priority_masked64
void gpio_add_raw_irq_handler_with_order_priority_masked64 (uint64_t gpio_mask, irq_handler_t handler, uint8_t
order_priority)
Adds a raw GPIO IRQ handler for the specified GPIOs on the current core.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 154

In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default callback. The order relative to the
default callback can be controlled via the order_priority parameter (the default callback has the priority
GPIO_IRQ_CALLBACK_ORDER_PRIORITY which defaults to the lowest priority with the intention of it running last).
This method adds such an explicit GPIO IRQ handler, and disables the "default" callback for the specified GPIOs.
NOTE
Multiple raw handlers should not be added for the same GPIOs, and this method will assert if you attempt to.
Internally, this function calls irq_add_shared_handler, which will assert if the maximum number of shared handlers
(configurable via PICO_MAX_IRQ_SHARED_HANDLERS) would be exceeded.
A raw handler should check for whichever GPIOs and events it handles, and acknowledge them itself; it might look
something like:
Ê1 void my_irq_handler(void) {
Ê2 if (gpio_get_irq_event_mask(my_gpio_num) & my_gpio_event_mask) {
Ê3 gpio_acknowledge_irq(my_gpio_num, my_gpio_event_mask);
Ê4 // handle the IRQ
Ê5 }
Ê6 if (gpio_get_irq_event_mask(my_gpio_num2) & my_gpio_event_mask2) {
Ê7 gpio_acknowledge_irq(my_gpio_num2, my_gpio_event_mask2);
Ê8 // handle the IRQ
Ê9 }
10 }
Parameters
gpio_mask
a bit mask of the GPIO numbers that will no longer be passed to the default callback for this
core
handler
the handler to add to the list of GPIO IRQ handlers for this core
order_priority
the priority order to determine the relative position of the handler in the list of GPIO IRQ
handlers for this core.
4.1.10.7.8. gpio_clr_mask
static void gpio_clr_mask (uint32_t mask) [inline], [static]
Drive low every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to clear
4.1.10.7.9. gpio_clr_mask64
static void gpio_clr_mask64 (uint64_t mask) [inline], [static]
Drive low every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to clear
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 155

4.1.10.7.10. gpio_clr_mask_n
static void gpio_clr_mask_n (uint n, uint32_t mask) [inline], [static]
Drive low every GPIO appearing in mask.
Parameters
n
the base GPIO index of the mask to update. n == 0 means 0->31, n == 1 mean 32->63 etc.
mask
Bitmask of 32 GPIO values to clear
4.1.10.7.11. gpio_deinit
void gpio_deinit (uint gpio)
Resets a GPIO back to the NULL function, i.e. disables it.
Parameters
gpio
GPIO number
4.1.10.7.12. gpio_disable_pulls
static void gpio_disable_pulls (uint gpio) [inline], [static]
Disable pulls on specified GPIO.
Parameters
gpio
GPIO number
4.1.10.7.13. gpio_get
static bool gpio_get (uint gpio) [inline], [static]
Get state of a single specified GPIO.
Parameters
gpio
GPIO number
Returns
Current state of the GPIO. 0 for low, non-zero for high
4.1.10.7.14. gpio_get_all
static uint32_t gpio_get_all (void) [inline], [static]
Get raw value of all GPIOs.
Returns
Bitmask of raw GPIO values
4.1.10.7.15. gpio_get_all64
static uint64_t gpio_get_all64 (void) [inline], [static]
Get raw value of all GPIOs.
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 156

Bitmask of raw GPIO values
4.1.10.7.16. gpio_get_dir
static uint gpio_get_dir (uint gpio) [inline], [static]
Get a specific GPIO direction.
Parameters
gpio
GPIO number
Returns
1 for out, 0 for in
4.1.10.7.17. gpio_get_drive_strength
enum gpio_drive_strength gpio_get_drive_strength (uint gpio)
Determine current drive strength for a specified GPIO.
See also
gpio_set_drive_strength
Parameters
gpio
GPIO number
Returns
Current drive strength of that GPIO
4.1.10.7.18. gpio_get_function
gpio_function_t gpio_get_function (uint gpio)
Determine current GPIO function.
Parameters
gpio
GPIO number
Returns
Which GPIO function is currently selected from list gpio_function
4.1.10.7.19. gpio_get_irq_event_mask
static uint32_t gpio_get_irq_event_mask (uint gpio) [inline], [static]
Return the current interrupt status (pending events) for the given GPIO.
Parameters
gpio
GPIO number
Returns
Bitmask of events that are currently pending for the GPIO. See gpio_irq_level for details.
See also
gpio_acknowledge_irq
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 157

4.1.10.7.20. gpio_get_out_level
static bool gpio_get_out_level (uint gpio) [inline], [static]
Determine whether a GPIO is currently driven high or low.
This function returns the high/low output level most recently assigned to a GPIO via gpio_put() or similar. This is the
value that is presented outward to the IO muxing, not the input level back from the pad (which can be read using
gpio_get()).
To avoid races, this function must not be used for read-modify-write sequences when driving GPIOs – instead functions
like gpio_put() should be used to atomically update GPIOs. This accessor is intended for debug use only.
Parameters
gpio
GPIO number
Returns
true if the GPIO output level is high, false if low.
4.1.10.7.21. gpio_get_slew_rate
enum gpio_slew_rate gpio_get_slew_rate (uint gpio)
Determine current slew rate for a specified GPIO.
See also
gpio_set_slew_rate
Parameters
gpio
GPIO number
Returns
Current slew rate of that GPIO
4.1.10.7.22. gpio_init
void gpio_init (uint gpio)
Initialise a GPIO for (enabled I/O and set func to GPIO_FUNC_SIO)
Clear the output enable (i.e. set to input). Clear any output value.
Parameters
gpio
GPIO number
4.1.10.7.23. gpio_init_mask
void gpio_init_mask (uint gpio_mask)
Initialise multiple GPIOs (enabled I/O and set func to GPIO_FUNC_SIO)
Clear the output enable (i.e. set to input). Clear any output value.
Parameters
gpio_mask
Mask with 1 bit per GPIO number to initialize
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 158

4.1.10.7.24. gpio_is_dir_out
static bool gpio_is_dir_out (uint gpio) [inline], [static]
Check if a specific GPIO direction is OUT.
Parameters
gpio
GPIO number
Returns
true if the direction for the pin is OUT
4.1.10.7.25. gpio_is_input_hysteresis_enabled
bool gpio_is_input_hysteresis_enabled (uint gpio)
Determine whether input hysteresis is enabled on a specified GPIO.
See also
gpio_set_input_hysteresis_enabled
Parameters
gpio
GPIO number
4.1.10.7.26. gpio_is_pulled_down
static bool gpio_is_pulled_down (uint gpio) [inline], [static]
Determine if the specified GPIO is pulled down.
Parameters
gpio
GPIO number
Returns
true if the GPIO is pulled down
4.1.10.7.27. gpio_is_pulled_up
static bool gpio_is_pulled_up (uint gpio) [inline], [static]
Determine if the specified GPIO is pulled up.
Parameters
gpio
GPIO number
Returns
true if the GPIO is pulled up
4.1.10.7.28. gpio_pull_down
static void gpio_pull_down (uint gpio) [inline], [static]
Set specified GPIO to be pulled down.
Parameters
gpio
GPIO number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 159

4.1.10.7.29. gpio_pull_up
static void gpio_pull_up (uint gpio) [inline], [static]
Set specified GPIO to be pulled up.
Parameters
gpio
GPIO number
4.1.10.7.30. gpio_put
static void gpio_put (uint gpio, bool value) [inline], [static]
Drive a single GPIO high/low.
Parameters
gpio
GPIO number
value
If false clear the GPIO, otherwise set it.
4.1.10.7.31. gpio_put_all
static void gpio_put_all (uint32_t value) [inline], [static]
Drive all pins simultaneously.
Parameters
value
Bitmask of GPIO values to change
4.1.10.7.32. gpio_put_all64
static void gpio_put_all64 (uint64_t value) [inline], [static]
Drive all pins simultaneously.
Parameters
value
Bitmask of GPIO values to change
4.1.10.7.33. gpio_put_masked
static void gpio_put_masked (uint32_t mask, uint32_t value) [inline], [static]
Drive GPIOs high/low depending on parameters.
Parameters
mask
Bitmask of GPIO values to change
value
Value to set
For each 1 bit in mask, drive that pin to the value given by corresponding bit in value, leaving other pins unchanged. Since
this uses the TOGL alias, it is concurrency-safe with e.g. an IRQ bashing different pins from the same core.
4.1.10.7.34. gpio_put_masked64
static void gpio_put_masked64 (uint64_t mask, uint64_t value) [inline], [static]
Drive GPIOs high/low depending on parameters.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 160

Parameters
mask
Bitmask of GPIO values to change
value
Value to set
For each 1 bit in mask, drive that pin to the value given by corresponding bit in value, leaving other pins unchanged. Since
this uses the TOGL alias, it is concurrency-safe with e.g. an IRQ bashing different pins from the same core.
4.1.10.7.35. gpio_put_masked_n
static void gpio_put_masked_n (uint n, uint32_t mask, uint32_t value) [inline], [static]
Drive GPIOs high/low depending on parameters.
Parameters
n
the base GPIO index of the mask to update. n == 0 means 0->31, n == 1 mean 32->63 etc.
mask
Bitmask of GPIO values to change
value
Value to set
For each 1 bit in mask, drive that pin to the value given by corresponding bit in value, leaving other pins unchanged. Since
this uses the TOGL alias, it is concurrency-safe with e.g. an IRQ bashing different pins from the same core.
4.1.10.7.36. gpio_remove_raw_irq_handler
static void gpio_remove_raw_irq_handler (uint gpio, irq_handler_t handler) [inline], [static]
Removes a raw GPIO IRQ handler for the specified GPIO on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method removes such a callback, and enables the "default" callback for the specified GPIO.
Parameters
gpio
the GPIO number that will now be passed to the default callback for this core
handler
the handler to remove from the list of GPIO IRQ handlers for this core
4.1.10.7.37. gpio_remove_raw_irq_handler_masked
void gpio_remove_raw_irq_handler_masked (uint32_t gpio_mask, irq_handler_t handler)
Removes a raw GPIO IRQ handler for the specified GPIOs on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method removes such a callback, and enables the "default" callback for the specified GPIOs.
Parameters
gpio_mask
a bit mask of the GPIO numbers that will now be passed to the default callback for this core
handler
the handler to remove from the list of GPIO IRQ handlers for this core
4.1.10.7.38. gpio_remove_raw_irq_handler_masked64
void gpio_remove_raw_irq_handler_masked64 (uint64_t gpio_mask, irq_handler_t handler)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 161

Removes a raw GPIO IRQ handler for the specified GPIOs on the current core.
In addition to the default mechanism of a single GPIO IRQ event callback per core (see gpio_set_irq_callback), it is
possible to add explicit GPIO IRQ handlers which are called independent of the default event callback.
This method removes such a callback, and enables the "default" callback for the specified GPIOs.
Parameters
gpio_mask
a bit mask of the GPIO numbers that will now be passed to the default callback for this core
handler
the handler to remove from the list of GPIO IRQ handlers for this core
4.1.10.7.39. gpio_set_dir
static void gpio_set_dir (uint gpio, bool out) [inline], [static]
Set a single GPIO direction.
Parameters
gpio
GPIO number
out
true for out, false for in
4.1.10.7.40. gpio_set_dir_all_bits
static void gpio_set_dir_all_bits (uint32_t values) [inline], [static]
Set direction of all pins simultaneously.
Parameters
values
individual settings for each gpio; for GPIO N, bit N is 1 for out, 0 for in
4.1.10.7.41. gpio_set_dir_all_bits64
static void gpio_set_dir_all_bits64 (uint64_t values) [inline], [static]
Set direction of all pins simultaneously.
Parameters
values
individual settings for each gpio; for GPIO N, bit N is 1 for out, 0 for in
4.1.10.7.42. gpio_set_dir_in_masked
static void gpio_set_dir_in_masked (uint32_t mask) [inline], [static]
Set a number of GPIOs to input.
Parameters
mask
Bitmask of GPIO to set to input
4.1.10.7.43. gpio_set_dir_in_masked64
static void gpio_set_dir_in_masked64 (uint64_t mask) [inline], [static]
Set a number of GPIOs to input.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 162

mask
Bitmask of GPIO to set to input
4.1.10.7.44. gpio_set_dir_masked
static void gpio_set_dir_masked (uint32_t mask, uint32_t value) [inline], [static]
Set multiple GPIO directions.
Parameters
mask
Bitmask of GPIO to set to input, as bits 0-29
value
Values to set
For each 1 bit in "mask", switch that pin to the direction given by corresponding bit in "value", leaving other pins
unchanged. E.g. gpio_set_dir_masked(0x3, 0x2); -> set pin 0 to input, pin 1 to output, simultaneously.
4.1.10.7.45. gpio_set_dir_masked64
static void gpio_set_dir_masked64 (uint64_t mask, uint64_t value) [inline], [static]
Set multiple GPIO directions.
Parameters
mask
Bitmask of GPIO to set to input, as bits 0-29
value
Values to set
For each 1 bit in "mask", switch that pin to the direction given by corresponding bit in "value", leaving other pins
unchanged. E.g. gpio_set_dir_masked(0x3, 0x2); -> set pin 0 to input, pin 1 to output, simultaneously.
4.1.10.7.46. gpio_set_dir_out_masked
static void gpio_set_dir_out_masked (uint32_t mask) [inline], [static]
Set a number of GPIOs to output.
Switch all GPIOs in "mask" to output
Parameters
mask
Bitmask of GPIO to set to output
4.1.10.7.47. gpio_set_dir_out_masked64
static void gpio_set_dir_out_masked64 (uint64_t mask) [inline], [static]
Set a number of GPIOs to output.
Switch all GPIOs in "mask" to output
Parameters
mask
Bitmask of GPIO to set to output
4.1.10.7.48. gpio_set_dormant_irq_enabled
void gpio_set_dormant_irq_enabled (uint gpio, uint32_t event_mask, bool enabled)
Enable dormant wake up interrupt for specified GPIO and events.
This configures IRQs to restart the XOSC or ROSC when they are disabled in dormant mode
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 163

Parameters
gpio
GPIO number
event_mask
Which events will cause an interrupt. See gpio_irq_level for details.
enabled
Enable/disable flag
4.1.10.7.49. gpio_set_drive_strength
void gpio_set_drive_strength (uint gpio, enum gpio_drive_strength drive)
Set drive strength for a specified GPIO.
See also
gpio_get_drive_strength
Parameters
gpio
GPIO number
drive
GPIO output drive strength
4.1.10.7.50. gpio_set_function
void gpio_set_function (uint gpio, gpio_function_t fn)
Select GPIO function.
Parameters
gpio
GPIO number
fn
Which GPIO function select to use from list gpio_function
4.1.10.7.51. gpio_set_function_masked
void gpio_set_function_masked (uint32_t gpio_mask, gpio_function_t fn)
Select the function for multiple GPIOs.
See also
gpio_set_function
Parameters
gpio_mask
Mask with 1 bit per GPIO number to set the function for
fn
Which GPIO function select to use from list gpio_function
4.1.10.7.52. gpio_set_function_masked64
void gpio_set_function_masked64 (uint64_t gpio_mask, gpio_function_t fn)
Select the function for multiple GPIOs.
See also
gpio_set_function
Parameters
gpio_mask
Mask with 1 bit per GPIO number to set the function for
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 164

fn
Which GPIO function select to use from list gpio_function
4.1.10.7.53. gpio_set_inover
void gpio_set_inover (uint gpio, uint value)
Select GPIO input override.
Parameters
gpio
GPIO number
value
See gpio_override
4.1.10.7.54. gpio_set_input_enabled
void gpio_set_input_enabled (uint gpio, bool enabled)
Enable GPIO input.
Parameters
gpio
GPIO number
enabled
true to enable input on specified GPIO
4.1.10.7.55. gpio_set_input_hysteresis_enabled
void gpio_set_input_hysteresis_enabled (uint gpio, bool enabled)
Enable/disable GPIO input hysteresis (Schmitt trigger)
Enable or disable the Schmitt trigger hysteresis on a given GPIO. This is enabled on all GPIOs by default. Disabling input
hysteresis can lead to inconsistent readings when the input signal has very long rise or fall times, but slightly reduces
the GPIO’s input delay.
See also
gpio_is_input_hysteresis_enabled
Parameters
gpio
GPIO number
enabled
true to enable input hysteresis on specified GPIO
4.1.10.7.56. gpio_set_irq_callback
void gpio_set_irq_callback (gpio_irq_callback_t callback)
Set the generic callback used for GPIO IRQ events for the current core.
This function sets the callback used for all GPIO IRQs on the current core that are not explicitly hooked via
gpio_add_raw_irq_handler or other gpio_add_raw_irq_handler_ functions.
This function is called with the GPIO number and event mask for each of the (not explicitly hooked) GPIOs that have
events enabled and that are pending (see gpio_get_irq_event_mask).
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 165

NOTE
The IO IRQs are independent per-processor. This function affects the processor that calls the function.
Parameters
callback
default user function to call on GPIO irq. Note only one of these can be set per processor.
4.1.10.7.57. gpio_set_irq_enabled
void gpio_set_irq_enabled (uint gpio, uint32_t event_mask, bool enabled)
Enable or disable specific interrupt events for specified GPIO.
This function sets which GPIO events cause a GPIO interrupt on the calling core. See gpio_set_irq_callback,
gpio_set_irq_enabled_with_callback and gpio_add_raw_irq_handler to set up a GPIO interrupt handler to handle the
events.
NOTE
The IO IRQs are independent per-processor. This configures the interrupt events for the processor that calls the
function.
Parameters
gpio
GPIO number
event_mask
Which events will cause an interrupt
enabled
Enable or disable flag
Events is a bitmask of the following gpio_irq_level values:
bit constant interrupt
0 GPIO_IRQ_LEVEL_LOW Continuously while level is low
1 GPIO_IRQ_LEVEL_HIGH Continuously while level is high
2 GPIO_IRQ_EDGE_FALL On each transition from high to low
3 GPIO_IRQ_EDGE_RISE On each transition from low to high
which are specified in gpio_irq_level
4.1.10.7.58. gpio_set_irq_enabled_with_callback
void gpio_set_irq_enabled_with_callback (uint gpio, uint32_t event_mask, bool enabled, gpio_irq_callback_t callback)
Convenience function which performs multiple GPIO IRQ related initializations.
This method is a slightly eclectic mix of initialization, that:
•
Updates whether the specified events for the specified GPIO causes an interrupt on the calling core based on the
enable flag.
•
Sets the callback handler for the calling core to callback (or clears the handler if the callback is NULL).
•
Enables GPIO IRQs on the current core if enabled is true.
This method is commonly used to perform a one time setup, and following that any additional IRQs/events are enabled
via gpio_set_irq_enabled. All GPIOs/events added in this way on the same core share the same callback; for multiple
independent handlers for different GPIOs you should use gpio_add_raw_irq_handler and related functions.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 166

This method is equivalent to:
1 gpio_set_irq_enabled(gpio, event_mask, enabled);
2 gpio_set_irq_callback(callback);
3 if (enabled) irq_set_enabled(IO_IRQ_BANK0, true);
NOTE
The IO IRQs are independent per-processor. This method affects only the processor that calls the function.
Parameters
gpio
GPIO number
event_mask
Which events will cause an interrupt. See gpio_irq_level for details.
enabled
Enable or disable flag
callback
user function to call on GPIO irq. if NULL, the callback is removed
4.1.10.7.59. gpio_set_irqover
void gpio_set_irqover (uint gpio, uint value)
Set GPIO IRQ override.
Optionally invert a GPIO IRQ signal, or drive it high or low
Parameters
gpio
GPIO number
value
See gpio_override
4.1.10.7.60. gpio_set_mask
static void gpio_set_mask (uint32_t mask) [inline], [static]
Drive high every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to set
4.1.10.7.61. gpio_set_mask64
static void gpio_set_mask64 (uint64_t mask) [inline], [static]
Drive high every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to set
4.1.10.7.62. gpio_set_mask_n
static void gpio_set_mask_n (uint n, uint32_t mask) [inline], [static]
Drive high every GPIO appearing in mask.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 167

Parameters
n
the base GPIO index of the mask to update. n == 0 means 0->31, n == 1 mean 32->63 etc.
mask
Bitmask of 32 GPIO values to set
4.1.10.7.63. gpio_set_oeover
void gpio_set_oeover (uint gpio, uint value)
Select GPIO output enable override.
Parameters
gpio
GPIO number
value
See gpio_override
4.1.10.7.64. gpio_set_outover
void gpio_set_outover (uint gpio, uint value)
Set GPIO output override.
Parameters
gpio
GPIO number
value
See gpio_override
4.1.10.7.65. gpio_set_pulls
void gpio_set_pulls (uint gpio, bool up, bool down)
Select up and down pulls on specific GPIO.
Parameters
gpio
GPIO number
up
If true set a pull up on the GPIO
down
If true set a pull down on the GPIO
NOTE
On the RP2040, setting both pulls enables a "bus keep" function, i.e. a weak pull to whatever is current high/low state
of GPIO.
4.1.10.7.66. gpio_set_slew_rate
void gpio_set_slew_rate (uint gpio, enum gpio_slew_rate slew)
Set slew rate for a specified GPIO.
See also
gpio_get_slew_rate
Parameters
gpio
GPIO number
slew
GPIO output slew rate
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 168

4.1.10.7.67. gpio_xor_mask
static void gpio_xor_mask (uint32_t mask) [inline], [static]
Toggle every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to toggle
4.1.10.7.68. gpio_xor_mask64
static void gpio_xor_mask64 (uint64_t mask) [inline], [static]
Toggle every GPIO appearing in mask.
Parameters
mask
Bitmask of GPIO values to toggle
4.1.10.7.69. gpio_xor_mask_n
static void gpio_xor_mask_n (uint n, uint32_t mask) [inline], [static]
Toggle every GPIO appearing in mask.
Parameters
n
the base GPIO index of the mask to update. n == 0 means 0->31, n == 1 mean 32->63 etc.
mask
Bitmask of 32 GPIO values to toggle
4.1.11. hardware_hazard3
Accessors for Hazard3-specific RISC-V CSRs, and intrinsics for Hazard3 custom instructions.
4.1.12. hardware_i2c
I2C Controller API.
4.1.12.1. Detailed Description
The I2C bus is a two-wire serial interface, consisting of a serial data line SDA and a serial clock SCL. These wires carry
information between the devices connected to the bus. Each device is recognized by a unique 7-bit address and can
operate as either a “transmitter” or “receiver”, depending on the function of the device. Devices can also be considered
as masters or slaves when performing data transfers. A master is a device that initiates a data transfer on the bus and
generates the clock signals to permit that transfer. The first byte in the data transfer always contains the 7-bit address
and a read/write bit in the LSB position. This API takes care of toggling the read/write bit. After this, any device
addressed is considered a slave.
This API allows the controller to be set up as a master or a slave using the i2c_set_slave_mode function.
The external pins of each controller are connected to GPIO pins as defined in the GPIO muxing table in the datasheet.
The muxing options give some IO flexibility, but each controller external pin should be connected to only one GPIO.
Note that the controller does NOT support High speed mode or Ultra-fast speed mode, the fastest operation being fast
mode plus at up to 1000Kb/s.
See the datasheet for more information on the I2C controller and its usage.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 169

4.1.12.1.1. Example
Ê1 // Sweep through all 7-bit I2C addresses, to see if any slaves are present on
Ê2 // the I2C bus. Print out a table that looks like this:
Ê3 //
Ê4 // I2C Bus Scan
Ê5 // 0 1 2 3 4 5 6 7 8 9 A B C D E F
Ê6 // 00 . . . . . . . . . . . . . . . .
Ê7 // 10 . . @ . . . . . . . . . . . . .
Ê8 // 20 . . . . . . . . . . . . . . . .
Ê9 // 30 . . . . @ . . . . . . . . . . .
10 // 40 . . . . . . . . . . . . . . . .
11 // 50 . . . . . . . . . . . . . . . .
12 // 60 . . . . . . . . . . . . . . . .
13 // 70 . . . . . . . . . . . . . . . .
14 // E.g. if addresses 0x12 and 0x34 were acknowledged.
15
16 #include <stdio.h>
17 #include "pico/stdlib.h"
18 #include "pico/binary_info.h"
19 #include "hardware/i2c.h"
20
21 // I2C reserves some addresses for special purposes. We exclude these from the scan.
22 // These are any addresses of the form 000 0xxx or 111 1xxx
23 bool reserved_addr(uint8_t addr) {
24 return (addr & 0x78) == 0 || (addr & 0x78) == 0x78;
25 }
26
27 int main() {
28 // Enable UART so we can print status output
29 stdio_init_all();
30 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
31 #warning i2c/bus_scan example requires a board with I2C pins
32 puts("Default I2C pins were not defined");
33 #else
34 // This example will use I2C0 on the default SDA and SCL pins (GP4, GP5 on a Pico)
35 i2c_init(i2c_default, 100 * 1000);
36 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
37 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
38 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
39 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
40 // Make the I2C pins available to picotool
41 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
42
43 printf("\nI2C Bus Scan\n");
44 printf(" 0 1 2 3 4 5 6 7 8 9 A B C D E F\n");
45
46 for (int addr = 0; addr < (1 << 7); ++addr) {
47 if (addr % 16 == 0) {
48 printf("%02x ", addr);
49 }
50
51 // Perform a 1-byte dummy read from the probe address. If a slave
52 // acknowledges this address, the function returns the number of bytes
53 // transferred. If the address byte is ignored, the function returns
54 // -1.
55
56 // Skip over any reserved addresses.
57 int ret;
58 uint8_t rxdata;
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 170

59 if (reserved_addr(addr))
60 ret = PICO_ERROR_GENERIC;
61 else
62 ret = i2c_read_blocking(i2c_default, addr, &rxdata, 1, false);
63
64 printf(ret < 0 ? "." : "@");
65 printf(addr % 16 == 15 ? "\n" : " ");
66 }
67 printf("Done.\n");
68 return 0;
69 #endif
70 }
4.1.12.2. Macros
•
#define I2C_NUM(i2c)
•
#define I2C_INSTANCE(num)
•
#define I2C_DREQ_NUM(i2c, is_tx)
4.1.12.3. Functions
uint i2c_init (i2c_inst_t *i2c, uint baudrate)
Initialise the I2C HW block.
void i2c_deinit (i2c_inst_t *i2c)
Disable the I2C HW block.
uint i2c_set_baudrate (i2c_inst_t *i2c, uint baudrate)
Set I2C baudrate.
void i2c_set_slave_mode (i2c_inst_t *i2c, bool slave, uint8_t addr)
Set I2C port to slave mode.
static uint i2c_get_index (i2c_inst_t *i2c)
Convert I2C instance to hardware instance number.
static i2c_hw_t * i2c_get_hw (i2c_inst_t *i2c)
Return pointer to structure containing i2c hardware registers.
static i2c_inst_t * i2c_get_instance (uint num)
Convert I2C hardware instance number to I2C instance.
int i2c_write_blocking_until (i2c_inst_t *i2c, uint8_t addr, const uint8_t *src, size_t len, bool nostop, absolute_time_t
until)
Attempt to write specified number of bytes to address, blocking until the specified absolute time is reached.
int i2c_read_blocking_until (i2c_inst_t *i2c, uint8_t addr, uint8_t *dst, size_t len, bool nostop, absolute_time_t until)
Attempt to read specified number of bytes from address, blocking until the specified absolute time is reached.
static int i2c_write_timeout_us (i2c_inst_t *i2c, uint8_t addr, const uint8_t *src, size_t len, bool nostop, uint
timeout_us)
Attempt to write specified number of bytes to address, with timeout.
static int i2c_read_timeout_us (i2c_inst_t *i2c, uint8_t addr, uint8_t *dst, size_t len, bool nostop, uint timeout_us)
Attempt to read specified number of bytes from address, with timeout.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 171

int i2c_write_blocking (i2c_inst_t *i2c, uint8_t addr, const uint8_t *src, size_t len, bool nostop)
Attempt to write specified number of bytes to address, blocking.
int i2c_read_blocking (i2c_inst_t *i2c, uint8_t addr, uint8_t *dst, size_t len, bool nostop)
Attempt to read specified number of bytes from address, blocking.
static size_t i2c_get_write_available (i2c_inst_t *i2c)
Determine non-blocking write space available.
static size_t i2c_get_read_available (i2c_inst_t *i2c)
Determine number of bytes received.
static void i2c_write_raw_blocking (i2c_inst_t *i2c, const uint8_t *src, size_t len)
Write direct to TX FIFO.
static void i2c_read_raw_blocking (i2c_inst_t *i2c, uint8_t *dst, size_t len)
Read direct from RX FIFO.
static uint8_t i2c_read_byte_raw (i2c_inst_t *i2c)
Pop a byte from I2C Rx FIFO.
static void i2c_write_byte_raw (i2c_inst_t *i2c, uint8_t value)
Push a byte into I2C Tx FIFO.
static uint i2c_get_dreq (i2c_inst_t *i2c, bool is_tx)
Return the DREQ to use for pacing transfers to/from a particular I2C instance.
4.1.12.3.1. i2c0_inst
i2c_inst_t i2c0_inst
The I2C identifiers for use in I2C functions.
e.g. i2c_init(i2c0, 48000)
4.1.12.4. Macro Definition Documentation
4.1.12.4.1. I2C_NUM
#define I2C_NUM(i2c)
Returns the I2C number for a I2C instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.12.4.2. I2C_INSTANCE
#define I2C_INSTANCE(num)
Returns the I2C instance with the given I2C number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.12.4.3. I2C_DREQ_NUM
#define I2C_DREQ_NUM(i2c, is_tx)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 172

Returns the dreq_num_t used for pacing DMA transfers to or from this I2C instance. If is_tx is true, then it is for transfers
to the I2C instance else for transfers from the I2C instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.12.5. Function Documentation
4.1.12.5.1. i2c_deinit
void i2c_deinit (i2c_inst_t * i2c)
Disable the I2C HW block.
Parameters
i2c
Either i2c0 or i2c1
Disable the I2C again if it is no longer used. Must be reinitialised before being used again.
4.1.12.5.2. i2c_get_dreq
static uint i2c_get_dreq (i2c_inst_t * i2c, bool is_tx) [inline], [static]
Return the DREQ to use for pacing transfers to/from a particular I2C instance.
Parameters
i2c
Either i2c0 or i2c1
is_tx
true for sending data to the I2C instance, false for receiving data from the I2C instance
4.1.12.5.3. i2c_get_hw
static i2c_hw_t * i2c_get_hw (i2c_inst_t * i2c) [inline], [static]
Return pointer to structure containing i2c hardware registers.
Parameters
i2c
I2C instance
Returns
pointer to i2c_hw_t
4.1.12.5.4. i2c_get_index
static uint i2c_get_index (i2c_inst_t * i2c) [inline], [static]
Convert I2C instance to hardware instance number.
Parameters
i2c
I2C instance
Returns
Number of I2C, 0 or 1.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 173

4.1.12.5.5. i2c_get_instance
static i2c_inst_t * i2c_get_instance (uint num) [inline], [static]
Convert I2C hardware instance number to I2C instance.
Parameters
num
Number of I2C, 0 or 1
Returns
I2C hardware instance
4.1.12.5.6. i2c_get_read_available
static size_t i2c_get_read_available (i2c_inst_t * i2c) [inline], [static]
Determine number of bytes received.
Parameters
i2c
Either i2c0 or i2c1
Returns
0 if no data available, if return is nonzero at least that many bytes can be read without blocking.
4.1.12.5.7. i2c_get_write_available
static size_t i2c_get_write_available (i2c_inst_t * i2c) [inline], [static]
Determine non-blocking write space available.
Parameters
i2c
Either i2c0 or i2c1
Returns
0 if no space is available in the I2C to write more data. If return is nonzero, at least that many bytes can be written
without blocking.
4.1.12.5.8. i2c_init
uint i2c_init (i2c_inst_t * i2c, uint baudrate)
Initialise the I2C HW block.
Put the I2C hardware into a known state, and enable it. Must be called before other functions. By default, the I2C is
configured to operate as a master.
The I2C bus frequency is set as close as possible to requested, and the actual rate set is returned
Parameters
i2c
Either i2c0 or i2c1
baudrate
Baudrate in Hz (e.g. 100kHz is 100000)
Returns
Actual set baudrate
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 174

4.1.12.5.9. i2c_read_blocking
int i2c_read_blocking (i2c_inst_t * i2c, uint8_t addr, uint8_t * dst, size_t len, bool nostop)
Attempt to read specified number of bytes from address, blocking.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to read from
dst
Pointer to buffer to receive data
len
Length of data in bytes to receive
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
Returns
Number of bytes read, or PICO_ERROR_GENERIC if address not acknowledged or no device present.
4.1.12.5.10. i2c_read_blocking_until
int i2c_read_blocking_until (i2c_inst_t * i2c, uint8_t addr, uint8_t * dst, size_t len, bool nostop, absolute_time_t
until)
Attempt to read specified number of bytes from address, blocking until the specified absolute time is reached.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to read from
dst
Pointer to buffer to receive data
len
Length of data in bytes to receive
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
until
The absolute time that the block will wait until the entire transaction is complete.
Returns
Number of bytes read, or PICO_ERROR_GENERIC if address not acknowledged, no device present, or
PICO_ERROR_TIMEOUT if a timeout occurred.
4.1.12.5.11. i2c_read_byte_raw
static uint8_t i2c_read_byte_raw (i2c_inst_t * i2c) [inline], [static]
Pop a byte from I2C Rx FIFO.
This function is non-blocking and assumes the Rx FIFO isn’t empty.
Parameters
i2c
I2C instance.
Returns
uint8_t Byte value.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 175

4.1.12.5.12. i2c_read_raw_blocking
static void i2c_read_raw_blocking (i2c_inst_t * i2c, uint8_t * dst, size_t len) [inline], [static]
Read direct from RX FIFO.
Parameters
i2c
Either i2c0 or i2c1
dst
Buffer to accept data
len
Number of bytes to read
Reads directly from the I2C RX FIFO which is mainly useful for slave-mode operation.
4.1.12.5.13. i2c_read_timeout_us
static int i2c_read_timeout_us (i2c_inst_t * i2c, uint8_t addr, uint8_t * dst, size_t len, bool nostop, uint timeout_us)
[inline], [static]
Attempt to read specified number of bytes from address, with timeout.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to read from
dst
Pointer to buffer to receive data
len
Length of data in bytes to receive
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
timeout_us
The time that the function will wait for the entire transaction to complete
Returns
Number of bytes read, or PICO_ERROR_GENERIC if address not acknowledged, no device present, or
PICO_ERROR_TIMEOUT if a timeout occurred.
4.1.12.5.14. i2c_set_baudrate
uint i2c_set_baudrate (i2c_inst_t * i2c, uint baudrate)
Set I2C baudrate.
Set I2C bus frequency as close as possible to requested, and return actual rate set. Baudrate may not be as exactly
requested due to clocking limitations.
Parameters
i2c
Either i2c0 or i2c1
baudrate
Baudrate in Hz (e.g. 100kHz is 100000)
Returns
Actual set baudrate
4.1.12.5.15. i2c_set_slave_mode
void i2c_set_slave_mode (i2c_inst_t * i2c, bool slave, uint8_t addr)
Set I2C port to slave mode.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 176

Parameters
i2c
Either i2c0 or i2c1
slave
true to use slave mode, false to use master mode
addr
If slave is true, set the slave address to this value
4.1.12.5.16. i2c_write_blocking
int i2c_write_blocking (i2c_inst_t * i2c, uint8_t addr, const uint8_t * src, size_t len, bool nostop)
Attempt to write specified number of bytes to address, blocking.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to write to
src
Pointer to data to send
len
Length of data in bytes to send
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
Returns
Number of bytes written, or PICO_ERROR_GENERIC if address not acknowledged, no device present.
4.1.12.5.17. i2c_write_blocking_until
int i2c_write_blocking_until (i2c_inst_t * i2c, uint8_t addr, const uint8_t * src, size_t len, bool nostop,
absolute_time_t until)
Attempt to write specified number of bytes to address, blocking until the specified absolute time is reached.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to write to
src
Pointer to data to send
len
Length of data in bytes to send
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
until
The absolute time that the block will wait until the entire transaction is complete. Note, an individual
timeout of this value divided by the length of data is applied for each byte transfer, so if the first or
subsequent bytes fails to transfer within that sub timeout, the function will return with an error.
Returns
Number of bytes written, or PICO_ERROR_GENERIC if address not acknowledged, no device present, or
PICO_ERROR_TIMEOUT if a timeout occurred.
4.1.12.5.18. i2c_write_byte_raw
static void i2c_write_byte_raw (i2c_inst_t * i2c, uint8_t value) [inline], [static]
Push a byte into I2C Tx FIFO.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 177

This function is non-blocking and assumes the Tx FIFO isn’t full.
Parameters
i2c
I2C instance.
value
Byte value.
4.1.12.5.19. i2c_write_raw_blocking
static void i2c_write_raw_blocking (i2c_inst_t * i2c, const uint8_t * src, size_t len) [inline], [static]
Write direct to TX FIFO.
Parameters
i2c
Either i2c0 or i2c1
src
Data to send
len
Number of bytes to send
Writes directly to the I2C TX FIFO which is mainly useful for slave-mode operation.
4.1.12.5.20. i2c_write_timeout_us
static int i2c_write_timeout_us (i2c_inst_t * i2c, uint8_t addr, const uint8_t * src, size_t len, bool nostop, uint
timeout_us) [inline], [static]
Attempt to write specified number of bytes to address, with timeout.
Parameters
i2c
Either i2c0 or i2c1
addr
7-bit address of device to write to
src
Pointer to data to send
len
Length of data in bytes to send
nostop
If true, master retains control of the bus at the end of the transfer (no Stop is issued), and the next
transfer will begin with a Restart rather than a Start.
timeout_us
The time that the function will wait for the entire transaction to complete. Note, an individual
timeout of this value divided by the length of data is applied for each byte transfer, so if the first or
subsequent bytes fails to transfer within that sub timeout, the function will return with an error.
Returns
Number of bytes written, or PICO_ERROR_GENERIC if address not acknowledged, no device present, or
PICO_ERROR_TIMEOUT if a timeout occurred.
4.1.13. hardware_interp
Hardware Interpolator API.
4.1.13.1. Detailed Description
Each core is equipped with two interpolators (INTERP0 and INTERP1) which can be used to accelerate tasks by
combining certain pre-configured simple operations into a single processor cycle. Intended for cases where the pre-
configured operation is repeated a large number of times, this results in code which uses both fewer CPU cycles and
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 178

fewer CPU registers in the time critical sections of the code.
The interpolators are used heavily to accelerate audio operations within the SDK, but their flexible configuration make it
possible to optimise many other tasks such as quantization and dithering, table lookup address generation, affine
texture mapping, decompression and linear feedback.
Please refer to the appropriate RP-series microcontroller datasheet for more information on the HW interpolators and
how they work.
4.1.13.2. Modules
interp_config
Interpolator configuration .
4.1.13.3. Functions
void interp_claim_lane (interp_hw_t *interp, uint lane)
Claim the interpolator lane specified.
void interp_claim_lane_mask (interp_hw_t *interp, uint lane_mask)
Claim the interpolator lanes specified in the mask.
void interp_unclaim_lane (interp_hw_t *interp, uint lane)
Release a previously claimed interpolator lane.
bool interp_lane_is_claimed (interp_hw_t *interp, uint lane)
Determine if an interpolator lane is claimed.
void interp_unclaim_lane_mask (interp_hw_t *interp, uint lane_mask)
Release previously claimed interpolator lanes.
static void interp_set_force_bits (interp_hw_t *interp, uint lane, uint bits)
Directly set the force bits on a specified lane.
void interp_save (interp_hw_t *interp, interp_hw_save_t *saver)
Save the specified interpolator state.
void interp_restore (interp_hw_t *interp, interp_hw_save_t *saver)
Restore an interpolator state.
static void interp_set_base (interp_hw_t *interp, uint lane, uint32_t val)
Sets the interpolator base register by lane.
static uint32_t interp_get_base (interp_hw_t *interp, uint lane)
Gets the content of interpolator base register by lane.
static void interp_set_base_both (interp_hw_t *interp, uint32_t val)
Sets the interpolator base registers simultaneously.
static void interp_set_accumulator (interp_hw_t *interp, uint lane, uint32_t val)
Sets the interpolator accumulator register by lane.
static uint32_t interp_get_accumulator (interp_hw_t *interp, uint lane)
Gets the content of the interpolator accumulator register by lane.
static uint32_t interp_pop_lane_result (interp_hw_t *interp, uint lane)
Read lane result, and write lane results to both accumulators to update the interpolator.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 179

static uint32_t interp_peek_lane_result (interp_hw_t *interp, uint lane)
Read lane result.
static uint32_t interp_pop_full_result (interp_hw_t *interp)
Read lane result, and write lane results to both accumulators to update the interpolator.
static uint32_t interp_peek_full_result (interp_hw_t *interp)
Read lane result.
static void interp_add_accumulater (interp_hw_t *interp, uint lane, uint32_t val)
Add to accumulator.
static uint32_t interp_get_raw (interp_hw_t *interp, uint lane)
Get raw lane value.
4.1.13.4. Function Documentation
4.1.13.4.1. interp_add_accumulater
static void interp_add_accumulater (interp_hw_t * interp, uint lane, uint32_t val) [inline], [static]
Add to accumulator.
Atomically add the specified value to the accumulator on the specified lane
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
val
Value to add
4.1.13.4.2. interp_claim_lane
void interp_claim_lane (interp_hw_t * interp, uint lane)
Claim the interpolator lane specified.
Use this function to claim exclusive access to the specified interpolator lane.
This function will panic if the lane is already claimed.
Parameters
interp
Interpolator on which to claim a lane. interp0 or interp1
lane
The lane number, 0 or 1.
4.1.13.4.3. interp_claim_lane_mask
void interp_claim_lane_mask (interp_hw_t * interp, uint lane_mask)
Claim the interpolator lanes specified in the mask.
Parameters
interp
Interpolator on which to claim lanes. interp0 or interp1
lane_mask
Bit pattern of lanes to claim (only bits 0 and 1 are valid)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 180

4.1.13.4.4. interp_get_accumulator
static uint32_t interp_get_accumulator (interp_hw_t * interp, uint lane) [inline], [static]
Gets the content of the interpolator accumulator register by lane.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
Returns
The current content of the register
4.1.13.4.5. interp_get_base
static uint32_t interp_get_base (interp_hw_t * interp, uint lane) [inline], [static]
Gets the content of interpolator base register by lane.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1 or 2
Returns
The current content of the lane base register
4.1.13.4.6. interp_get_raw
static uint32_t interp_get_raw (interp_hw_t * interp, uint lane) [inline], [static]
Get raw lane value.
Returns the raw shift and mask value from the specified lane, BASE0 is NOT added
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
Returns
The raw shift/mask value
4.1.13.4.7. interp_lane_is_claimed
bool interp_lane_is_claimed (interp_hw_t * interp, uint lane)
Determine if an interpolator lane is claimed.
Parameters
interp
Interpolator whose lane to check
lane
The lane number, 0 or 1
Returns
true if claimed, false otherwise
See also
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 181

interp_claim_lane
interp_claim_lane_mask
4.1.13.4.8. interp_peek_full_result
static uint32_t interp_peek_full_result (interp_hw_t * interp) [inline], [static]
Read lane result.
Parameters
interp
Interpolator instance, interp0 or interp1.
Returns
The content of the FULL register
4.1.13.4.9. interp_peek_lane_result
static uint32_t interp_peek_lane_result (interp_hw_t * interp, uint lane) [inline], [static]
Read lane result.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
Returns
The content of the lane result register
4.1.13.4.10. interp_pop_full_result
static uint32_t interp_pop_full_result (interp_hw_t * interp) [inline], [static]
Read lane result, and write lane results to both accumulators to update the interpolator.
Parameters
interp
Interpolator instance, interp0 or interp1.
Returns
The content of the FULL register
4.1.13.4.11. interp_pop_lane_result
static uint32_t interp_pop_lane_result (interp_hw_t * interp, uint lane) [inline], [static]
Read lane result, and write lane results to both accumulators to update the interpolator.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
Returns
The content of the lane result register
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 182

4.1.13.4.12. interp_restore
void interp_restore (interp_hw_t * interp, interp_hw_save_t * saver)
Restore an interpolator state.
Parameters
interp
Interpolator instance, interp0 or interp1.
saver
Pointer to save structure to reapply to the specified interpolator
4.1.13.4.13. interp_save
void interp_save (interp_hw_t * interp, interp_hw_save_t * saver)
Save the specified interpolator state.
Can be used to save state if you need an interpolator for another purpose, state can then be recovered afterwards and
continue from that point
Parameters
interp
Interpolator instance, interp0 or interp1.
saver
Pointer to the save structure to fill in
4.1.13.4.14. interp_set_accumulator
static void interp_set_accumulator (interp_hw_t * interp, uint lane, uint32_t val) [inline], [static]
Sets the interpolator accumulator register by lane.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1
val
The value to apply to the register
4.1.13.4.15. interp_set_base
static void interp_set_base (interp_hw_t * interp, uint lane, uint32_t val) [inline], [static]
Sets the interpolator base register by lane.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane number, 0 or 1 or 2
val
The value to apply to the register
4.1.13.4.16. interp_set_base_both
static void interp_set_base_both (interp_hw_t * interp, uint32_t val) [inline], [static]
Sets the interpolator base registers simultaneously.
The lower 16 bits go to BASE0, upper bits to BASE1 simultaneously. Each half is sign-extended to 32 bits if that lane’s
SIGNED flag is set.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 183

interp
Interpolator instance, interp0 or interp1.
val
The value to apply to the register
4.1.13.4.17. interp_set_force_bits
static void interp_set_force_bits (interp_hw_t * interp, uint lane, uint bits) [inline], [static]
Directly set the force bits on a specified lane.
These bits are ORed into bits 29:28 of the lane result presented to the processor on the bus. There is no effect on the
internal 32-bit datapath.
Useful for using a lane to generate sequence of pointers into flash or SRAM, saving a subsequent OR or add operation.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane to set
bits
The bits to set (bits 0 and 1, value range 0-3)
4.1.13.4.18. interp_unclaim_lane
void interp_unclaim_lane (interp_hw_t * interp, uint lane)
Release a previously claimed interpolator lane.
Parameters
interp
Interpolator on which to release a lane. interp0 or interp1
lane
The lane number, 0 or 1
4.1.13.4.19. interp_unclaim_lane_mask
void interp_unclaim_lane_mask (interp_hw_t * interp, uint lane_mask)
Release previously claimed interpolator lanes.
See also
interp_claim_lane_mask
Parameters
interp
Interpolator on which to release lanes. interp0 or interp1
lane_mask
Bit pattern of lanes to unclaim (only bits 0 and 1 are valid)
4.1.13.5. interp_config
Interpolator configuration .
4.1.13.5.1. Detailed Description
Each interpolator needs to be configured, these functions provide handy helpers to set up configuration structures.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 184

4.1.13.5.2. Functions
static void interp_config_set_shift (interp_config *c, uint shift)
Set the interpolator shift value.
static void interp_config_set_mask (interp_config *c, uint mask_lsb, uint mask_msb)
Set the interpolator mask range.
static void interp_config_set_cross_input (interp_config *c, bool cross_input)
Enable cross input.
static void interp_config_set_cross_result (interp_config *c, bool cross_result)
Enable cross results.
static void interp_config_set_signed (interp_config *c, bool _signed)
Set sign extension.
static void interp_config_set_add_raw (interp_config *c, bool add_raw)
Set raw add option.
static void interp_config_set_blend (interp_config *c, bool blend)
Set blend mode.
static void interp_config_set_clamp (interp_config *c, bool clamp)
Set interpolator clamp mode (Interpolator 1 only)
static void interp_config_set_force_bits (interp_config *c, uint bits)
Set interpolator Force bits.
static interp_config interp_default_config (void)
Get a default configuration.
static void interp_set_config (interp_hw_t *interp, uint lane, interp_config *config)
Send configuration to a lane.
4.1.13.5.3. Function Documentation
interp_config_set_add_raw
static void interp_config_set_add_raw (interp_config * c, bool add_raw) [inline], [static]
Set raw add option.
When enabled, mask + shift is bypassed for LANE0 result. This does not affect the FULL result.
Parameters
c
Pointer to interpolation config
add_raw
If true, enable raw add option.
interp_config_set_blend
static void interp_config_set_blend (interp_config * c, bool blend) [inline], [static]
Set blend mode.
If enabled, LANE1 result is a linear interpolation between BASE0 and BASE1, controlled by the 8 LSBs of lane 1 shift and
mask value (a fractional number between 0 and 255/256ths)
LANE0 result does not have BASE0 added (yields only the 8 LSBs of lane 1 shift+mask value)
FULL result does not have lane 1 shift+mask value added (BASE2 + lane 0 shift+mask)
LANE1 SIGNED flag controls whether the interpolation is signed or unsig
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 185

Parameters
c
Pointer to interpolation config
blend
Set true to enable blend mode.
interp_config_set_clamp
static void interp_config_set_clamp (interp_config * c, bool clamp) [inline], [static]
Set interpolator clamp mode (Interpolator 1 only)
Only present on INTERP1 on each core. If CLAMP mode is enabled:
•
LANE0 result is a shifted and masked ACCUM0, clamped by a lower bound of BASE0 and an upper bound of
BASE1.
•
Signedness of these comparisons is determined by LANE0_CTRL_SIGNED
Parameters
c
Pointer to interpolation config
clamp
Set true to enable clamp mode
interp_config_set_cross_input
static void interp_config_set_cross_input (interp_config * c, bool cross_input) [inline], [static]
Enable cross input.
Allows feeding of the accumulator content from the other lane back in to this lanes shift+mask hardware. This will take
effect even if the interp_config_set_add_raw option is set as the cross input mux is before the shift+mask bypass
Parameters
c
Pointer to interpolation config
cross_input
If true, enable the cross input.
interp_config_set_cross_result
static void interp_config_set_cross_result (interp_config * c, bool cross_result) [inline], [static]
Enable cross results.
Allows feeding of the other lane’s result into this lane’s accumulator on a POP operation.
Parameters
c
Pointer to interpolation config
cross_result
If true, enables the cross result
interp_config_set_force_bits
static void interp_config_set_force_bits (interp_config * c, uint bits) [inline], [static]
Set interpolator Force bits.
ORed into bits 29:28 of the lane result presented to the processor on the bus.
No effect on the internal 32-bit datapath. Handy for using a lane to generate sequence of pointers into flash or SRAM
Parameters
c
Pointer to interpolation config
bits
Sets the force bits to that specified. Range 0-3 (two bits)
interp_config_set_mask
static void interp_config_set_mask (interp_config * c, uint mask_lsb, uint mask_msb) [inline], [static]
Set the interpolator mask range.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 186

Sets the range of bits (least to most) that are allowed to pass through the interpolator
Parameters
c
Pointer to interpolation config
mask_lsb
The least significant bit allowed to pass
mask_msb
The most significant bit allowed to pass
interp_config_set_shift
static void interp_config_set_shift (interp_config * c, uint shift) [inline], [static]
Set the interpolator shift value.
Sets the number of bits the accumulator is shifted before masking, on each iteration.
Parameters
c
Pointer to an interpolator config
shift
Number of bits
interp_config_set_signed
static void interp_config_set_signed (interp_config * c, bool _signed) [inline], [static]
Set sign extension.
Enables signed mode, where the shifted and masked accumulator value is sign-extended to 32 bits before adding to
BASE1, and LANE1 PEEK/POP results appear extended to 32 bits when read by processor.
Parameters
c
Pointer to interpolation config
_signed
If true, enables sign extension
interp_default_config
static interp_config interp_default_config (void) [inline], [static]
Get a default configuration.
Returns
A default interpolation configuration
interp_set_config
static void interp_set_config (interp_hw_t * interp, uint lane, interp_config * config) [inline], [static]
Send configuration to a lane.
If an invalid configuration is specified (ie a lane specific item is set on wrong lane), depending on setup this function
can panic.
Parameters
interp
Interpolator instance, interp0 or interp1.
lane
The lane to set
config
Pointer to interpolation config
4.1.14. hardware_irq
Hardware interrupt handling API.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 187

4.1.14.1. Detailed Description
The RP2040 uses the standard ARM nested vectored interrupt controller (NVIC).
Interrupts are identified by a number from 0 to 31.
On the RP2040, only the lower 26 IRQ signals are connected on the NVIC; IRQs 26 to 31 are tied to zero (never firing).
There is one NVIC per core, and each core’s NVIC has the same hardware interrupt lines routed to it, with the exception
of the IO interrupts where there is one IO interrupt per bank, per core. These are completely independent, so, for
example, processor 0 can be interrupted by GPIO 0 in bank 0, and processor 1 by GPIO 1 in the same bank.
NOTE
That all IRQ APIs affect the executing core only (i.e. the core calling the function).
You should not enable the same (shared) IRQ number on both cores, as this will lead to race conditions or starvation
of one of the cores. Additionally, don’t forget that disabling interrupts on one core does not disable interrupts on the
other core.
There are three different ways to set handlers for an IRQ:
•
Calling irq_add_shared_handler() at runtime to add a handler for a multiplexed interrupt (e.g. GPIO bank) on the
current core. Each handler, should check and clear the relevant hardware interrupt source
•
Calling irq_set_exclusive_handler() at runtime to install a single handler for the interrupt on the current core
•
Defining the interrupt handler explicitly in your application (e.g. by defining void isr_dma_0 will make that function
the handler for the DMA_IRQ_0 on core 0, and you will not be able to change it using the above APIs at runtime).
Using this method can cause link conflicts at runtime, and offers no runtime performance benefit (i.e, it should not
generally be used).
NOTE
If an IRQ is enabled and fires with no handler installed, a breakpoint will be hit and the IRQ number will be in register
r0.
4.1.14.1.1. Interrupt Numbers
A set of defines is available (intctrl.h) with these names to avoid using the numbers directly.
On RP2040 the interrupt numbers are as follows:
IRQ Interrupt Source
0 TIMER_IRQ_0
1 TIMER_IRQ_1
2 TIMER_IRQ_2
3 TIMER_IRQ_3
4 PWM_IRQ_WRAP
5 USBCTRL_IRQ
6 XIP_IRQ
7 PIO0_IRQ_0
8 PIO0_IRQ_1
9 PIO1_IRQ_0
10 PIO1_IRQ_1
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 188

IRQ Interrupt Source
11 DMA_IRQ_0
12 DMA_IRQ_1
13 IO_IRQ_BANK0
14 IO_IRQ_QSPI
15 SIO_IRQ_PROC0
16 SIO_IRQ_PROC1
17 CLOCKS_IRQ
18 SPI0_IRQ
19 SPI1_IRQ
20 UART0_IRQ
21 UART1_IRQ
22 ADC0_IRQ_FIFO
23 I2C0_IRQ
24 I2C1_IRQ
25 RTC_IRQ
On RP2350 the interrupt numbers are as follows:
IRQ Interrupt Source
0 TIMER0_IRQ_0
1 TIMER0_IRQ_1
2 TIMER0_IRQ_2
3 TIMER0_IRQ_3
4 TIMER1_IRQ_0
5 TIMER1_IRQ_1
6 TIMER1_IRQ_2
7 TIMER1_IRQ_3
8 PWM_IRQ_WRAP_0
9 PWM_IRQ_WRAP_1
10 DMA_IRQ_0
11 DMA_IRQ_1
12 DMA_IRQ_2
13 DMA_IRQ_3
14 USBCTRL_IRQ
15 PIO0_IRQ_0
16 PIO0_IRQ_1
17 PIO1_IRQ_0
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 189

IRQ Interrupt Source
18 PIO1_IRQ_1
19 PIO2_IRQ_0
20 PIO2_IRQ_1
21 IO_IRQ_BANK0
22 IO_IRQ_BANK0_NS
23 IO_IRQ_QSPI
24 IO_IRQ_QSPI_NS
25 SIO_IRQ_FIFO
26 SIO_IRQ_BELL
27 SIO_IRQ_FIFO_NS
28 SIO_IRQ_BELL_NS
29 SIO_IRQ_MTIMECMP
30 CLOCKS_IRQ
31 SPI0_IRQ
32 SPI1_IRQ
33 UART0_IRQ
34 UART1_IRQ
35 ADC_IRQ_FIFO
36 I2C0_IRQ
37 I2C1_IRQ
38 OTP_IRQ
39 TRNG_IRQ
40 PROC0_IRQ_CTI
41 PROC1_IRQ_CTI
42 PLL_SYS_IRQ
43 PLL_USB_IRQ
44 POWMAN_IRQ_POW
45 POWMAN_IRQ_TIMER
46 SPAREIRQ_IRQ_0
47 SPAREIRQ_IRQ_1
48 SPAREIRQ_IRQ_2
49 SPAREIRQ_IRQ_3
50 SPAREIRQ_IRQ_4
51 SPAREIRQ_IRQ_5
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 190

4.1.14.2. Typedefs
typedef enum irq_num_rp2350 irq_num_t
Interrupt numbers on RP2350 (used as typedef irq_num_t)
typedef enum irq_num_rp2040 irq_num_t
Interrupt numbers on RP2040 (used as typedef irq_num_t)
typedef void(* irq_handler_t)(void)
Interrupt handler function type.
4.1.14.3. Enumerations
enum irq_num_rp2350 { TIMER0_IRQ_0 = 0, TIMER0_IRQ_1 = 1, TIMER0_IRQ_2 = 2, TIMER0_IRQ_3 = 3, TIMER1_IRQ_0 = 4,
TIMER1_IRQ_1 = 5, TIMER1_IRQ_2 = 6, TIMER1_IRQ_3 = 7, PWM_IRQ_WRAP_0 = 8, PWM_IRQ_WRAP_1 = 9, DMA_IRQ_0 = 10, DMA_IRQ_1 =
11, DMA_IRQ_2 = 12, DMA_IRQ_3 = 13, USBCTRL_IRQ = 14, PIO0_IRQ_0 = 15, PIO0_IRQ_1 = 16, PIO1_IRQ_0 = 17, PIO1_IRQ_1 = 18,
PIO2_IRQ_0 = 19, PIO2_IRQ_1 = 20, IO_IRQ_BANK0 = 21, IO_IRQ_BANK0_NS = 22, IO_IRQ_QSPI = 23, IO_IRQ_QSPI_NS = 24,
SIO_IRQ_FIFO = 25, SIO_IRQ_BELL = 26, SIO_IRQ_FIFO_NS = 27, SIO_IRQ_BELL_NS = 28, SIO_IRQ_MTIMECMP = 29, CLOCKS_IRQ = 30,
SPI0_IRQ = 31, SPI1_IRQ = 32, UART0_IRQ = 33, UART1_IRQ = 34, ADC_IRQ_FIFO = 35, I2C0_IRQ = 36, I2C1_IRQ = 37, OTP_IRQ =
38, TRNG_IRQ = 39, PROC0_IRQ_CTI = 40, PROC1_IRQ_CTI = 41, PLL_SYS_IRQ = 42, PLL_USB_IRQ = 43, POWMAN_IRQ_POW = 44,
POWMAN_IRQ_TIMER = 45, SPARE_IRQ_0 = 46, SPARE_IRQ_1 = 47, SPARE_IRQ_2 = 48, SPARE_IRQ_3 = 49, SPARE_IRQ_4 = 50,
SPARE_IRQ_5 = 51, IRQ_COUNT }
Interrupt numbers on RP2350 (used as typedef irq_num_t)
enum irq_num_rp2040 { TIMER_IRQ_0 = 0, TIMER_IRQ_1 = 1, TIMER_IRQ_2 = 2, TIMER_IRQ_3 = 3, PWM_IRQ_WRAP = 4, USBCTRL_IRQ =
5, XIP_IRQ = 6, PIO0_IRQ_0 = 7, PIO0_IRQ_1 = 8, PIO1_IRQ_0 = 9, PIO1_IRQ_1 = 10, DMA_IRQ_0 = 11, DMA_IRQ_1 = 12,
IO_IRQ_BANK0 = 13, IO_IRQ_QSPI = 14, SIO_IRQ_PROC0 = 15, SIO_IRQ_PROC1 = 16, CLOCKS_IRQ = 17, SPI0_IRQ = 18, SPI1_IRQ =
19, UART0_IRQ = 20, UART1_IRQ = 21, ADC_IRQ_FIFO = 22, I2C0_IRQ = 23, I2C1_IRQ = 24, RTC_IRQ = 25, IRQ_COUNT }
Interrupt numbers on RP2040 (used as typedef irq_num_t)
4.1.14.4. Functions
void irq_set_priority (uint num, uint8_t hardware_priority)
Set specified interrupt’s priority.
uint irq_get_priority (uint num)
Get specified interrupt’s priority.
void irq_set_enabled (uint num, bool enabled)
Enable or disable a specific interrupt on the executing core.
bool irq_is_enabled (uint num)
Determine if a specific interrupt is enabled on the executing core.
void irq_set_mask_enabled (uint32_t mask, bool enabled)
Enable/disable multiple interrupts on the executing core.
void irq_set_mask_n_enabled (uint n, uint32_t mask, bool enabled)
Enable/disable multiple interrupts on the executing core.
void irq_set_exclusive_handler (uint num, irq_handler_t handler)
Set an exclusive interrupt handler for an interrupt on the executing core.
irq_handler_t irq_get_exclusive_handler (uint num)
Get the exclusive interrupt handler for an interrupt on the executing core.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 191

void irq_add_shared_handler (uint num, irq_handler_t handler, uint8_t order_priority)
Add a shared interrupt handler for an interrupt on the executing core.
void irq_remove_handler (uint num, irq_handler_t handler)
Remove a specific interrupt handler for the given irq number on the executing core.
bool irq_has_shared_handler (uint num)
Determine if the current handler for the given number is shared.
irq_handler_t irq_get_vtable_handler (uint num)
Get the current IRQ handler for the specified IRQ from the currently installed hardware vector table (VTOR) of the
execution core.
static void irq_clear (uint int_num)
Clear a specific interrupt on the executing core.
void irq_set_pending (uint num)
Force an interrupt to be pending on the executing core.
void user_irq_claim (uint irq_num)
Claim ownership of a user IRQ on the calling core.
void user_irq_unclaim (uint irq_num)
Mark a user IRQ as no longer used on the calling core.
int user_irq_claim_unused (bool required)
Claim ownership of a free user IRQ on the calling core.
4.1.14.5. Typedef Documentation
4.1.14.5.1. irq_num_t
typedef enum irq_num_rp2350 irq_num_t
Interrupt numbers on RP2350 (used as typedef irq_num_t)
4.1.14.5.2. irq_num_t
typedef enum irq_num_rp2040 irq_num_t
Interrupt numbers on RP2040 (used as typedef irq_num_t)
4.1.14.5.3. irq_handler_t
typedef void(* irq_handler_t) (void)
Interrupt handler function type.
All interrupts handlers should be of this type, and follow normal ARM EABI register saving conventions
4.1.14.6. Enumeration Type Documentation
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 192

4.1.14.6.1. irq_num_rp2350
enum irq_num_rp2350
Interrupt numbers on RP2350 (used as typedef irq_num_t)
Table 22. Enumerator
TIMER0_IRQ_0
Select TIMER0’s IRQ 0 output.
TIMER0_IRQ_1
Select TIMER0’s IRQ 1 output.
TIMER0_IRQ_2
Select TIMER0’s IRQ 2 output.
TIMER0_IRQ_3
Select TIMER0’s IRQ 3 output.
TIMER1_IRQ_0
Select TIMER1’s IRQ 0 output.
TIMER1_IRQ_1
Select TIMER1’s IRQ 1 output.
TIMER1_IRQ_2
Select TIMER1’s IRQ 2 output.
TIMER1_IRQ_3
Select TIMER1’s IRQ 3 output.
PWM_IRQ_WRAP_0
Select PWM’s IRQ_WRAP 0 output.
PWM_IRQ_WRAP_1
Select PWM’s IRQ_WRAP 1 output.
DMA_IRQ_0
Select DMA’s IRQ 0 output.
DMA_IRQ_1
Select DMA’s IRQ 1 output.
DMA_IRQ_2
Select DMA’s IRQ 2 output.
DMA_IRQ_3
Select DMA’s IRQ 3 output.
USBCTRL_IRQ
Select USBCTRL’s IRQ output.
PIO0_IRQ_0
Select PIO0’s IRQ 0 output.
PIO0_IRQ_1
Select PIO0’s IRQ 1 output.
PIO1_IRQ_0
Select PIO1’s IRQ 0 output.
PIO1_IRQ_1
Select PIO1’s IRQ 1 output.
PIO2_IRQ_0
Select PIO2’s IRQ 0 output.
PIO2_IRQ_1
Select PIO2’s IRQ 1 output.
IO_IRQ_BANK0
Select IO_BANK0’s IRQ output.
IO_IRQ_BANK0_NS
Select IO_BANK0_NS’s IRQ output.
IO_IRQ_QSPI
Select IO_QSPI’s IRQ output.
IO_IRQ_QSPI_NS
Select IO_QSPI_NS’s IRQ output.
SIO_IRQ_FIFO
Select SIO’s IRQ_FIFO output.
SIO_IRQ_BELL
Select SIO’s IRQ_BELL output.
SIO_IRQ_FIFO_NS
Select SIO_NS’s IRQ_FIFO output.
SIO_IRQ_BELL_NS
Select SIO_NS’s IRQ_BELL output.
SIO_IRQ_MTIMECMP
Select SIO_IRQ_MTIMECMP’s IRQ output.
CLOCKS_IRQ
Select CLOCKS’s IRQ output.
SPI0_IRQ
Select SPI0’s IRQ output.
SPI1_IRQ
Select SPI1’s IRQ output.
UART0_IRQ
Select UART0’s IRQ output.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 193

UART1_IRQ
Select UART1’s IRQ output.
ADC_IRQ_FIFO
Select ADC’s IRQ_FIFO output.
I2C0_IRQ
Select I2C0’s IRQ output.
I2C1_IRQ
Select I2C1’s IRQ output.
OTP_IRQ
Select OTP’s IRQ output.
TRNG_IRQ
Select TRNG’s IRQ output.
PROC0_IRQ_CTI
Select PROC0’s IRQ_CTI output.
PROC1_IRQ_CTI
Select PROC1’s IRQ_CTI output.
PLL_SYS_IRQ
Select PLL_SYS’s IRQ output.
PLL_USB_IRQ
Select PLL_USB’s IRQ output.
POWMAN_IRQ_POW
Select POWMAN’s IRQ_POW output.
POWMAN_IRQ_TIMER
Select POWMAN’s IRQ_TIMER output.
SPARE_IRQ_0
Select SPARE IRQ 0.
SPARE_IRQ_1
Select SPARE IRQ 1.
SPARE_IRQ_2
Select SPARE IRQ 2.
SPARE_IRQ_3
Select SPARE IRQ 3.
SPARE_IRQ_4
Select SPARE IRQ 4.
SPARE_IRQ_5
Select SPARE IRQ 5.
4.1.14.6.2. irq_num_rp2040
enum irq_num_rp2040
Interrupt numbers on RP2040 (used as typedef irq_num_t)
Table 23. Enumerator
TIMER_IRQ_0
Select TIMER’s IRQ 0 output.
TIMER_IRQ_1
Select TIMER’s IRQ 1 output.
TIMER_IRQ_2
Select TIMER’s IRQ 2 output.
TIMER_IRQ_3
Select TIMER’s IRQ 3 output.
PWM_IRQ_WRAP
Select PWM’s IRQ_WRAP output.
USBCTRL_IRQ
Select USBCTRL’s IRQ output.
XIP_IRQ
Select XIP’s IRQ output.
PIO0_IRQ_0
Select PIO0’s IRQ 0 output.
PIO0_IRQ_1
Select PIO0’s IRQ 1 output.
PIO1_IRQ_0
Select PIO1’s IRQ 0 output.
PIO1_IRQ_1
Select PIO1’s IRQ 1 output.
DMA_IRQ_0
Select DMA’s IRQ 0 output.
DMA_IRQ_1
Select DMA’s IRQ 1 output.
IO_IRQ_BANK0
Select IO_BANK0’s IRQ output.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 194

IO_IRQ_QSPI
Select IO_QSPI’s IRQ output.
SIO_IRQ_PROC0
Select SIO_PROC0’s IRQ output.
SIO_IRQ_PROC1
Select SIO_PROC1’s IRQ output.
CLOCKS_IRQ
Select CLOCKS’s IRQ output.
SPI0_IRQ
Select SPI0’s IRQ output.
SPI1_IRQ
Select SPI1’s IRQ output.
UART0_IRQ
Select UART0’s IRQ output.
UART1_IRQ
Select UART1’s IRQ output.
ADC_IRQ_FIFO
Select ADC’s IRQ_FIFO output.
I2C0_IRQ
Select I2C0’s IRQ output.
I2C1_IRQ
Select I2C1’s IRQ output.
RTC_IRQ
Select RTC’s IRQ output.
4.1.14.7. Function Documentation
4.1.14.7.1. irq_add_shared_handler
void irq_add_shared_handler (uint num, irq_handler_t handler, uint8_t order_priority)
Add a shared interrupt handler for an interrupt on the executing core.
Use this method to add a handler on an irq number shared between multiple distinct hardware sources (e.g. GPIO, DMA
or PIO IRQs). Handlers added by this method will all be called in sequence from highest order_priority to lowest. The
irq_set_exclusive_handler() method should be used instead if you know there will or should only ever be one handler for
the interrupt.
This method will assert if there is an exclusive interrupt handler set for this irq number on this core, or if the (total
across all IRQs on both cores) maximum (configurable via PICO_MAX_SHARED_IRQ_HANDLERS) number of shared
handlers would be exceeded.
Parameters
num
Interrupt number Interrupt Numbers
handler
The handler to set. See irq_handler_t
order_priority
The order priority controls the order that handlers for the same IRQ number on the core are
called. The shared irq handlers for an interrupt are all called when an IRQ fires, however the
order of the calls is based on the order_priority (higher priorities are called first, identical
priorities are called in undefined order). A good rule of thumb is to use
PICO_SHARED_IRQ_HANDLER_DEFAULT_ORDER_PRIORITY if you don’t much care, as it is in
the middle of the priority range by default.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 195

NOTE
The order_priority uses higher values for higher priorities which is the opposite of the CPU interrupt priorities passed
to irq_set_priority() which use lower values for higher priorities.
See also
irq_set_exclusive_handler()
4.1.14.7.2. irq_clear
static void irq_clear (uint int_num) [inline], [static]
Clear a specific interrupt on the executing core.
This method is only useful for "software" IRQs that are not connected to hardware (e.g. IRQs 26-31 on RP2040) as the
the NVIC always reflects the current state of the IRQ state of the hardware for hardware IRQs, and clearing of the IRQ
state of the hardware is performed via the hardware’s registers instead.
Parameters
int_num
Interrupt number Interrupt Numbers
4.1.14.7.3. irq_get_exclusive_handler
irq_handler_t irq_get_exclusive_handler (uint num)
Get the exclusive interrupt handler for an interrupt on the executing core.
This method will return an exclusive IRQ handler set on this core by irq_set_exclusive_handler if there is one.
Parameters
num
Interrupt number Interrupt Numbers
See also
irq_set_exclusive_handler()
Returns
handler The handler if an exclusive handler is set for the IRQ, NULL if no handler is set or shared/shareable handlers are
installed
4.1.14.7.4. irq_get_priority
uint irq_get_priority (uint num)
Get specified interrupt’s priority.
Numerically-lower values indicate a higher priority. Hardware priorities range from 0 (highest priority) to 255 (lowest
priority). To make it easier to specify higher or lower priorities than the default, all IRQ priorities are initialized to
PICO_DEFAULT_IRQ_PRIORITY by the SDK runtime at startup. PICO_DEFAULT_IRQ_PRIORITY defaults to 0x80
Only the top 2 bits are significant on ARM Cortex-M0+ on RP2040.
Only the top 4 bits are significant on ARM Cortex-M33 or Hazard3 (RISC-V) on RP2350. Note that this API uses the same
(inverted) ordering as ARM on RISC-V
Parameters
num
Interrupt number Interrupt Numbers
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 196

the IRQ priority
4.1.14.7.5. irq_get_vtable_handler
irq_handler_t irq_get_vtable_handler (uint num)
Get the current IRQ handler for the specified IRQ from the currently installed hardware vector table (VTOR) of the
execution core.
Parameters
num
Interrupt number Interrupt Numbers
Returns
the address stored in the VTABLE for the given irq number
4.1.14.7.6. irq_has_shared_handler
bool irq_has_shared_handler (uint num)
Determine if the current handler for the given number is shared.
Parameters
num
Interrupt number Interrupt Numbers
Returns
true if the specified IRQ has a shared handler
4.1.14.7.7. irq_is_enabled
bool irq_is_enabled (uint num)
Determine if a specific interrupt is enabled on the executing core.
Parameters
num
Interrupt number Interrupt Numbers
Returns
true if the interrupt is enabled
4.1.14.7.8. irq_remove_handler
void irq_remove_handler (uint num, irq_handler_t handler)
Remove a specific interrupt handler for the given irq number on the executing core.
This method may be used to remove an irq set via either irq_set_exclusive_handler() or irq_add_shared_handler(), and
will assert if the handler is not currently installed for the given IRQ number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 197

NOTE
This method may only be called from user (non IRQ code) or from within the handler itself (i.e. an IRQ handler may
remove itself as part of handling the IRQ). Attempts to call from another IRQ will cause an assertion.
Parameters
num
Interrupt number Interrupt Numbers
handler
The handler to removed.
See also
irq_set_exclusive_handler()
irq_add_shared_handler()
4.1.14.7.9. irq_set_enabled
void irq_set_enabled (uint num, bool enabled)
Enable or disable a specific interrupt on the executing core.
Parameters
num
Interrupt number Interrupt Numbers
enabled
true to enable the interrupt, false to disable
4.1.14.7.10. irq_set_exclusive_handler
void irq_set_exclusive_handler (uint num, irq_handler_t handler)
Set an exclusive interrupt handler for an interrupt on the executing core.
Use this method to set a handler for single IRQ source interrupts, or when your code, use case or performance
requirements dictate that there should no other handlers for the interrupt.
This method will assert if there is already any sort of interrupt handler installed for the specified irq number.
Parameters
num
Interrupt number Interrupt Numbers
handler
The handler to set. See irq_handler_t
See also
irq_add_shared_handler()
4.1.14.7.11. irq_set_mask_enabled
void irq_set_mask_enabled (uint32_t mask, bool enabled)
Enable/disable multiple interrupts on the executing core.
Parameters
mask
32-bit mask with one bits set for the interrupts to enable/disable Interrupt Numbers
enabled
true to enable the interrupts, false to disable them.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 198

4.1.14.7.12. irq_set_mask_n_enabled
void irq_set_mask_n_enabled (uint n, uint32_t mask, bool enabled)
Enable/disable multiple interrupts on the executing core.
Parameters
n
the index of the mask to update. n == 0 means 0->31, n == 1 mean 32->63 etc.
mask
32-bit mask with one bits set for the interrupts to enable/disable Interrupt Numbers
enabled
true to enable the interrupts, false to disable them.
4.1.14.7.13. irq_set_pending
void irq_set_pending (uint num)
Force an interrupt to be pending on the executing core.
This should generally not be used for IRQs connected to hardware.
Parameters
num
Interrupt number Interrupt Numbers
4.1.14.7.14. irq_set_priority
void irq_set_priority (uint num, uint8_t hardware_priority)
Set specified interrupt’s priority.
Parameters
num
Interrupt number Interrupt Numbers
hardware_priority
Priority to set. Numerically-lower values indicate a higher priority. Hardware priorities range
from 0 (highest priority) to 255 (lowest priority). To make it easier to specify higher or lower
priorities than the default, all IRQ priorities are initialized to PICO_DEFAULT_IRQ_PRIORITY
by the SDK runtime at startup. PICO_DEFAULT_IRQ_PRIORITY defaults to 0x80
Only the top 2 bits are significant on ARM Cortex-M0+ on RP2040.
Only the top 4 bits are significant on ARM Cortex-M33 or Hazard3 (RISC-V) on RP2350. Note that this API uses the same
(inverted) ordering as ARM on RISC-V
4.1.14.7.15. user_irq_claim
void user_irq_claim (uint irq_num)
Claim ownership of a user IRQ on the calling core.
User IRQs starting from FIRST_USER_IRQ are not connected to any hardware, but can be triggered by irq_set_pending.
NOTE
User IRQs are a core local feature; they cannot be used to communicate between cores. Therefore all functions
dealing with Uer IRQs affect only the calling core
This method explicitly claims ownership of a user IRQ, so other code can know it is being used.
Parameters
irq_num
the user IRQ to claim
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 199

4.1.14.7.16. user_irq_claim_unused
int user_irq_claim_unused (bool required)
Claim ownership of a free user IRQ on the calling core.
User IRQs starting from FIRST_USER_IRQ are not connected to any hardware, but can be triggered by irq_set_pending.
NOTE
User IRQs are a core local feature; they cannot be used to communicate between cores. Therefore all functions
dealing with Uer IRQs affect only the calling core
This method explicitly claims ownership of an unused user IRQ if there is one, so other code can know it is being used.
Parameters
required
if true the function will panic if none are available
Returns
the user IRQ number or -1 if required was false, and none were free
4.1.14.7.17. user_irq_unclaim
void user_irq_unclaim (uint irq_num)
Mark a user IRQ as no longer used on the calling core.
User IRQs starting from FIRST_USER_IRQ are not connected to any hardware, but can be triggered by irq_set_pending.
NOTE
User IRQs are a core local feature; they cannot be used to communicate between cores. Therefore all functions
dealing with Uer IRQs affect only the calling core
This method explicitly releases ownership of a user IRQ, so other code can know it is free to use.
NOTE
it is customary to have disabled the irq and removed the handler prior to calling this method.
Parameters
irq_num
the irq irq_num to unclaim
4.1.15. hardware_pio
Programmable I/O (PIO) API.
4.1.15.1. Detailed Description
A programmable input/output block (PIO) is a versatile hardware interface which can support a number of different IO
standards.
There are two PIO blocks in the RP2040.
There are three PIO blocks in the RP2350
Each PIO is programmable in the same sense as a processor: the four state machines independently execute short,
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 200

sequential programs, to manipulate GPIOs and transfer data. Unlike a general purpose processor, PIO state machines
are highly specialised for IO, with a focus on determinism, precise timing, and close integration with fixed-function
hardware. Each state machine is equipped with:
•
Two 32-bit shift registers – either direction, any shift count
•
Two 32-bit scratch registers
•
4×32 bit bus FIFO in each direction (TX/RX), reconfigurable as 8×32 in a single direction
•
Fractional clock divider (16 integer, 8 fractional bits)
•
Flexible GPIO mapping
•
DMA interface, sustained throughput up to 1 word per clock from system DMA
•
IRQ flag set/clear/status
Full details of the PIO can be found in the appropriate RP-series datasheet. Note that there are additional features in the
RP2350 PIO implementation that mean care should be taken when writing PIO code that needs to run on both the
RP2040 and the RP2350.
4.1.15.2. Modules
sm_config
PIO state machine configuration .
pio_instructions
PIO instruction encoding .
4.1.15.3. Macros
•
#define pio0 pio0_hw
•
#define pio1 pio1_hw
•
#define PIO_NUM(pio)
•
#define PIO_INSTANCE(instance)
•
#define PIO_FUNCSEL_NUM(pio, gpio)
•
#define PIO_DREQ_NUM(pio, sm, is_tx)
•
#define PIO_IRQ_NUM(pio, irqn)
4.1.15.4. Typedefs
typedef enum pio_interrupt_source pio_interrupt_source_t
PIO interrupt source numbers for pio related IRQs.
4.1.15.5. Enumerations
enum pio_fifo_join { PIO_FIFO_JOIN_NONE = 0, PIO_FIFO_JOIN_TX = 1, PIO_FIFO_JOIN_RX = 2 }
FIFO join states.
enum pio_mov_status_type { STATUS_TX_LESSTHAN = 0, STATUS_RX_LESSTHAN = 1 }
MOV status types.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 201

enum pio_interrupt_source { pis_interrupt0 = PIO_INTR_SM0_LSB, pis_interrupt1 = PIO_INTR_SM1_LSB, pis_interrupt2 =
PIO_INTR_SM2_LSB, pis_interrupt3 = PIO_INTR_SM3_LSB, pis_sm0_tx_fifo_not_full = PIO_INTR_SM0_TXNFULL_LSB,
pis_sm1_tx_fifo_not_full = PIO_INTR_SM1_TXNFULL_LSB, pis_sm2_tx_fifo_not_full = PIO_INTR_SM2_TXNFULL_LSB,
pis_sm3_tx_fifo_not_full = PIO_INTR_SM3_TXNFULL_LSB, pis_sm0_rx_fifo_not_empty = PIO_INTR_SM0_RXNEMPTY_LSB,
pis_sm1_rx_fifo_not_empty = PIO_INTR_SM1_RXNEMPTY_LSB, pis_sm2_rx_fifo_not_empty = PIO_INTR_SM2_RXNEMPTY_LSB,
pis_sm3_rx_fifo_not_empty = PIO_INTR_SM3_RXNEMPTY_LSB }
PIO interrupt source numbers for pio related IRQs.
4.1.15.6. Functions
static uint pio_get_gpio_base (PIO pio)
Return the base GPIO base for the PIO instance.
static int pio_sm_set_config (PIO pio, uint sm, const pio_sm_config *config)
Apply a state machine configuration to a state machine.
static uint pio_get_index (PIO pio)
Return the instance number of a PIO instance.
static uint pio_get_funcsel (PIO pio)
Return the funcsel number of a PIO instance.
static PIO pio_get_instance (uint instance)
Convert PIO instance to hardware instance.
static void pio_gpio_init (PIO pio, uint pin)
Setup the function select for a GPIO to use output from the given PIO instance.
static uint pio_get_dreq (PIO pio, uint sm, bool is_tx)
Return the DREQ to use for pacing transfers to/from a particular state machine FIFO.
int pio_set_gpio_base (PIO pio, uint gpio_base)
Set the base GPIO base for the PIO instance.
bool pio_can_add_program (PIO pio, const pio_program_t *program)
Determine whether the given program can (at the time of the call) be loaded onto the PIO instance.
bool pio_can_add_program_at_offset (PIO pio, const pio_program_t *program, uint offset)
Determine whether the given program can (at the time of the call) be loaded onto the PIO instance starting at a
particular location.
int pio_add_program (PIO pio, const pio_program_t *program)
Attempt to load the program.
int pio_add_program_at_offset (PIO pio, const pio_program_t *program, uint offset)
Attempt to load the program at the specified instruction memory offset.
void pio_remove_program (PIO pio, const pio_program_t *program, uint loaded_offset)
Remove a program from a PIO instance’s instruction memory.
void pio_clear_instruction_memory (PIO pio)
Clears all of a PIO instance’s instruction memory.
static void pio_sm_set_enabled (PIO pio, uint sm, bool enabled)
Enable or disable a PIO state machine.
static void pio_set_sm_mask_enabled (PIO pio, uint32_t mask, bool enabled)
Enable or disable multiple PIO state machines.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 202

static void pio_sm_restart (PIO pio, uint sm)
Restart a state machine with a known state.
static void pio_restart_sm_mask (PIO pio, uint32_t mask)
Restart multiple state machine with a known state.
static void pio_sm_clkdiv_restart (PIO pio, uint sm)
Restart a state machine’s clock divider from a phase of 0.
static void pio_clkdiv_restart_sm_mask (PIO pio, uint32_t mask)
Restart multiple state machines' clock dividers from a phase of 0.
static void pio_enable_sm_mask_in_sync (PIO pio, uint32_t mask)
Enable multiple PIO state machines synchronizing their clock dividers.
static void pio_set_irq0_source_enabled (PIO pio, pio_interrupt_source_t source, bool enabled)
Enable/Disable a single source on a PIO’s IRQ 0.
static void pio_set_irq1_source_enabled (PIO pio, pio_interrupt_source_t source, bool enabled)
Enable/Disable a single source on a PIO’s IRQ 1.
static void pio_set_irq0_source_mask_enabled (PIO pio, uint32_t source_mask, bool enabled)
Enable/Disable multiple sources on a PIO’s IRQ 0.
static void pio_set_irq1_source_mask_enabled (PIO pio, uint32_t source_mask, bool enabled)
Enable/Disable multiple sources on a PIO’s IRQ 1.
static void pio_set_irqn_source_enabled (PIO pio, uint irq_index, pio_interrupt_source_t source, bool enabled)
Enable/Disable a single source on a PIO’s specified (0/1) IRQ index.
static void pio_set_irqn_source_mask_enabled (PIO pio, uint irq_index, uint32_t source_mask, bool enabled)
Enable/Disable multiple sources on a PIO’s specified (0/1) IRQ index.
static bool pio_interrupt_get (PIO pio, uint pio_interrupt_num)
Determine if a particular PIO interrupt is set.
static void pio_interrupt_clear (PIO pio, uint pio_interrupt_num)
Clear a particular PIO interrupt.
static uint8_t pio_sm_get_pc (PIO pio, uint sm)
Return the current program counter for a state machine.
static void pio_sm_exec (PIO pio, uint sm, uint instr)
Immediately execute an instruction on a state machine.
static bool pio_sm_is_exec_stalled (PIO pio, uint sm)
Determine if an instruction set by pio_sm_exec() is stalled executing.
static void pio_sm_exec_wait_blocking (PIO pio, uint sm, uint instr)
Immediately execute an instruction on a state machine and wait for it to complete.
static void pio_sm_set_wrap (PIO pio, uint sm, uint wrap_target, uint wrap)
Set the current wrap configuration for a state machine.
static void pio_sm_set_out_pins (PIO pio, uint sm, uint out_base, uint out_count)
Set the current 'out' pins for a state machine.
static void pio_sm_set_set_pins (PIO pio, uint sm, uint set_base, uint set_count)
Set the current 'set' pins for a state machine.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 203

static void pio_sm_set_in_pins (PIO pio, uint sm, uint in_base)
Set the current 'in' pins for a state machine.
static void pio_sm_set_sideset_pins (PIO pio, uint sm, uint sideset_base)
Set the current 'sideset' pins for a state machine.
static void pio_sm_set_jmp_pin (PIO pio, uint sm, uint pin)
Set the 'jmp' pin for a state machine.
static void pio_sm_put (PIO pio, uint sm, uint32_t data)
Write a word of data to a state machine’s TX FIFO.
static uint32_t pio_sm_get (PIO pio, uint sm)
Read a word of data from a state machine’s RX FIFO.
static bool pio_sm_is_rx_fifo_full (PIO pio, uint sm)
Determine if a state machine’s RX FIFO is full.
static bool pio_sm_is_rx_fifo_empty (PIO pio, uint sm)
Determine if a state machine’s RX FIFO is empty.
static uint pio_sm_get_rx_fifo_level (PIO pio, uint sm)
Return the number of elements currently in a state machine’s RX FIFO.
static bool pio_sm_is_tx_fifo_full (PIO pio, uint sm)
Determine if a state machine’s TX FIFO is full.
static bool pio_sm_is_tx_fifo_empty (PIO pio, uint sm)
Determine if a state machine’s TX FIFO is empty.
static uint pio_sm_get_tx_fifo_level (PIO pio, uint sm)
Return the number of elements currently in a state machine’s TX FIFO.
static void pio_sm_put_blocking (PIO pio, uint sm, uint32_t data)
Write a word of data to a state machine’s TX FIFO, blocking if the FIFO is full.
static uint32_t pio_sm_get_blocking (PIO pio, uint sm)
Read a word of data from a state machine’s RX FIFO, blocking if the FIFO is empty.
void pio_sm_drain_tx_fifo (PIO pio, uint sm)
Empty out a state machine’s TX FIFO.
static void pio_sm_set_clkdiv_int_frac (PIO pio, uint sm, uint16_t div_int, uint8_t div_frac)
set the current clock divider for a state machine using a 16:8 fraction
static void pio_sm_set_clkdiv (PIO pio, uint sm, float div)
set the current clock divider for a state machine
static void pio_sm_clear_fifos (PIO pio, uint sm)
Clear a state machine’s TX and RX FIFOs.
void pio_sm_set_pins (PIO pio, uint sm, uint32_t pin_values)
Use a state machine to set a value on all pins for the PIO instance.
void pio_sm_set_pins_with_mask (PIO pio, uint sm, uint32_t pin_values, uint32_t pin_mask)
Use a state machine to set a value on multiple pins for the PIO instance.
void pio_sm_set_pindirs_with_mask (PIO pio, uint sm, uint32_t pin_dirs, uint32_t pin_mask)
Use a state machine to set the pin directions for multiple pins for the PIO instance.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 204

int pio_sm_set_consecutive_pindirs (PIO pio, uint sm, uint pins_base, uint pin_count, bool is_out)
Use a state machine to set the same pin direction for multiple consecutive pins for the PIO instance.
void pio_sm_claim (PIO pio, uint sm)
Mark a state machine as used.
void pio_claim_sm_mask (PIO pio, uint sm_mask)
Mark multiple state machines as used.
void pio_sm_unclaim (PIO pio, uint sm)
Mark a state machine as no longer used.
int pio_claim_unused_sm (PIO pio, bool required)
Claim a free state machine on a PIO instance.
bool pio_sm_is_claimed (PIO pio, uint sm)
Determine if a PIO state machine is claimed.
bool pio_claim_free_sm_and_add_program (const pio_program_t *program, PIO *pio, uint *sm, uint *offset)
Finds a PIO and statemachine and adds a program into PIO memory.
bool pio_claim_free_sm_and_add_program_for_gpio_range (const pio_program_t *program, PIO *pio, uint *sm, uint *offset,
uint gpio_base, uint gpio_count, bool set_gpio_base)
Finds a PIO and statemachine and adds a program into PIO memory.
void pio_remove_program_and_unclaim_sm (const pio_program_t *program, PIO pio, uint sm, uint offset)
Removes a program from PIO memory and unclaims the state machine.
static int pio_get_irq_num (PIO pio, uint irqn)
Return an IRQ for a PIO hardware instance.
static pio_interrupt_source_t pio_get_tx_fifo_not_full_interrupt_source (uint sm)
Return the interrupt source for a state machines TX FIFO not full interrupt.
static pio_interrupt_source_t pio_get_rx_fifo_not_empty_interrupt_source (uint sm)
Return the interrupt source for a state machines RX FIFO not empty interrupt.
4.1.15.7. Macro Definition Documentation
4.1.15.7.1. pio0
#define pio0 pio0_hw
Identifier for the first (PIO 0) hardware PIO instance (for use in PIO functions).
e.g. pio_gpio_init(pio0, 5)
4.1.15.7.2. pio1
#define pio1 pio1_hw
Identifier for the second (PIO 1) hardware PIO instance (for use in PIO functions).
e.g. pio_gpio_init(pio1, 5)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 205

4.1.15.7.3. PIO_NUM
#define PIO_NUM(pio)
Returns the PIO number for a PIO instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.15.7.4. PIO_INSTANCE
#define PIO_INSTANCE(instance)
Returns the PIO instance with the given PIO number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.15.7.5. PIO_FUNCSEL_NUM
#define PIO_FUNCSEL_NUM(pio, gpio)
Returns gpio_function_t needed to select the PIO function for the given PIO instance on the given GPIO.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.15.7.6. PIO_DREQ_NUM
#define PIO_DREQ_NUM(pio, sm, is_tx)
Returns the dreq_num_t used for pacing DMA transfers to or from a given state machine’s FIFOs on this PIO instance. If
is_tx is true, then it is for transfers to the PIO state machine TX FIFO else for transfers from the PIO state machine RX
FIFO.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.15.7.7. PIO_IRQ_NUM
#define PIO_IRQ_NUM(pio, irqn)
Returns the irq_num_t for processor interrupts from the given PIO instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.15.8. Typedef Documentation
4.1.15.8.1. pio_interrupt_source_t
typedef enum pio_interrupt_source pio_interrupt_source_t
PIO interrupt source numbers for pio related IRQs.
4.1.15.9. Enumeration Type Documentation
4.1.15.9.1. pio_fifo_join
enum pio_fifo_join
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 206

FIFO join states.
Table 24. Enumerator
PIO_FIFO_JOIN_NONE
TX FIFO length=4 is used for transmit, RX FIFO length=4 is
used for receive.
PIO_FIFO_JOIN_TX
TX FIFO length=8 is used for transmit, RX FIFO is disabled.
PIO_FIFO_JOIN_RX
RX FIFO length=8 is used for receive, TX FIFO is disabled.
4.1.15.9.2. pio_mov_status_type
enum pio_mov_status_type
MOV status types.
4.1.15.9.3. pio_interrupt_source
enum pio_interrupt_source
PIO interrupt source numbers for pio related IRQs.
Table 25. Enumerator
pis_interrupt0
PIO interrupt 0 is raised.
pis_interrupt1
PIO interrupt 1 is raised.
pis_interrupt2
PIO interrupt 2 is raised.
pis_interrupt3
PIO interrupt 3 is raised.
pis_sm0_tx_fifo_not_full
State machine 0 TX FIFO is not full.
pis_sm1_tx_fifo_not_full
State machine 1 TX FIFO is not full.
pis_sm2_tx_fifo_not_full
State machine 2 TX FIFO is not full.
pis_sm3_tx_fifo_not_full
State machine 3 TX FIFO is not full.
pis_sm0_rx_fifo_not_empty
State machine 0 RX FIFO is not empty.
pis_sm1_rx_fifo_not_empty
State machine 1 RX FIFO is not empty.
pis_sm2_rx_fifo_not_empty
State machine 2 RX FIFO is not empty.
pis_sm3_rx_fifo_not_empty
State machine 3 RX FIFO is not empty.
4.1.15.10. Function Documentation
4.1.15.10.1. pio_add_program
int pio_add_program (PIO pio, const pio_program_t * program)
Attempt to load the program.
See also
pio_can_add_program() if you need to check whether the program can be loaded
Parameters
pio
The PIO instance; e.g. pio0 or pio1
program
the program definition
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 207

the instruction memory offset the program is loaded at, or negative for error (for backwards compatibility with prior SDK
the error value is -1 i.e. PICO_ERROR_GENERIC)
4.1.15.10.2. pio_add_program_at_offset
int pio_add_program_at_offset (PIO pio, const pio_program_t * program, uint offset)
Attempt to load the program at the specified instruction memory offset.
See also
pio_can_add_program_at_offset() if you need to check whether the program can be loaded
Parameters
pio
The PIO instance; e.g. pio0 or pio1
program
the program definition
offset
the instruction memory offset wanted for the start of the program
Returns
the instruction memory offset the program is loaded at, or negative for error (for backwards compatibility with prior SDK
the error value is -1 i.e. PICO_ERROR_GENERIC)
4.1.15.10.3. pio_can_add_program
bool pio_can_add_program (PIO pio, const pio_program_t * program)
Determine whether the given program can (at the time of the call) be loaded onto the PIO instance.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
program
the program definition
Returns
true if the program can be loaded; false if there is not suitable space in the instruction memory
4.1.15.10.4. pio_can_add_program_at_offset
bool pio_can_add_program_at_offset (PIO pio, const pio_program_t * program, uint offset)
Determine whether the given program can (at the time of the call) be loaded onto the PIO instance starting at a
particular location.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
program
the program definition
offset
the instruction memory offset wanted for the start of the program
Returns
true if the program can be loaded at that location; false if there is not space in the instruction memory
4.1.15.10.5. pio_claim_free_sm_and_add_program
bool pio_claim_free_sm_and_add_program (const pio_program_t * program, PIO * pio, uint * sm, uint * offset)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 208

Finds a PIO and statemachine and adds a program into PIO memory.
Parameters
program
PIO program to add
pio
Returns the PIO hardware instance or NULL if no PIO is available
sm
Returns the index of the PIO state machine that was claimed
offset
Returns the instruction memory offset of the start of the program
Returns
true on success, false otherwise
See also
pio_remove_program_unclaim_sm
4.1.15.10.6. pio_claim_free_sm_and_add_program_for_gpio_range
bool pio_claim_free_sm_and_add_program_for_gpio_range (const pio_program_t * program, PIO * pio, uint * sm, uint *
offset, uint gpio_base, uint gpio_count, bool set_gpio_base)
Finds a PIO and statemachine and adds a program into PIO memory.
This variation of pio_claim_free_sm_and_add_program is useful on RP2350 QFN80 where the "GPIO Base" must be set
per PIO instance to either address the 32 GPIOs (0->31) or the 32 GPIOS (16-47). No single PIO instance can interact
with both pins 0->15 or 32->47 at the same time.
This method takes additional information about the GPIO pins needed (via gpi_base and gpio_count), and optionally will
set the GPIO base (
See also
pio_set_gpio_base) of an unused PIO instance if necessary
Parameters
program
PIO program to add
pio
Returns the PIO hardware instance or NULL if no PIO is available
sm
Returns the index of the PIO state machine that was claimed
offset
Returns the instruction memory offset of the start of the program
gpio_base
the lowest GPIO number required
gpio_count
the count of GPIOs required
set_gpio_base
if there is no free SM on a PIO instance with the right GPIO base, and there IS an unused PIO
instance, then that PIO will be reconfigured so that this method can succeed
Returns
true on success, false otherwise
See also
pio_remove_program_unclaim_sm
4.1.15.10.7. pio_claim_sm_mask
void pio_claim_sm_mask (PIO pio, uint sm_mask)
Mark multiple state machines as used.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 209

Method for cooperative claiming of hardware. Will cause a panic if any of the state machines are already claimed. Use
of this method by libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm_mask
Mask of state machine indexes
4.1.15.10.8. pio_claim_unused_sm
int pio_claim_unused_sm (PIO pio, bool required)
Claim a free state machine on a PIO instance.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
required
if true the function will panic if none are available
Returns
the state machine index or negative if required was false, and none were free (for backwards compatibility with prior
SDK the error value is -1 i.e. PICO_ERROR_GENERIC)
4.1.15.10.9. pio_clear_instruction_memory
void pio_clear_instruction_memory (PIO pio)
Clears all of a PIO instance’s instruction memory.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
4.1.15.10.10. pio_clkdiv_restart_sm_mask
static void pio_clkdiv_restart_sm_mask (PIO pio, uint32_t mask) [inline], [static]
Restart multiple state machines' clock dividers from a phase of 0.
Each state machine’s clock divider is a free-running piece of hardware, that generates a pattern of clock enable pulses
for the state machine, based only on the configured integer/fractional divisor. The pattern of running/halted cycles
slows the state machine’s execution to some controlled rate.
This function simultaneously clears the integer and fractional phase accumulators of multiple state machines' clock
dividers. If these state machines all have the same integer and fractional divisors configured, their clock dividers will run
in precise deterministic lockstep from this point.
With their execution clocks synchronised in this way, it is then safe to e.g. have multiple state machines performing a
'wait irq' on the same flag, and all clear it on the same cycle.
Also note that this function can be called whilst state machines are running (e.g. if you have just changed the clock
divisors of some state machines and wish to resynchronise them), and that disabling a state machine does not halt its
clock divider: that is, if multiple state machines have their clocks synchronised, you can safely disable and re-enable one
of the state machines without losing synchronisation.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
mask
bit mask of state machine indexes to modify the enabled state of
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 210

4.1.15.10.11. pio_enable_sm_mask_in_sync
static void pio_enable_sm_mask_in_sync (PIO pio, uint32_t mask) [inline], [static]
Enable multiple PIO state machines synchronizing their clock dividers.
This is equivalent to calling both pio_set_sm_mask_enabled() and pio_clkdiv_restart_sm_mask() on the same clock
cycle. All state machines specified by 'mask' are started simultaneously and, assuming they have the same clock
divisors, their divided clocks will stay precisely synchronised.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
mask
bit mask of state machine indexes to modify the enabled state of
4.1.15.10.12. pio_get_dreq
static uint pio_get_dreq (PIO pio, uint sm, bool is_tx) [inline], [static]
Return the DREQ to use for pacing transfers to/from a particular state machine FIFO.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
is_tx
true for sending data to the state machine, false for receiving data from the state machine
4.1.15.10.13. pio_get_funcsel
static uint pio_get_funcsel (PIO pio) [inline], [static]
Return the funcsel number of a PIO instance.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
Returns
the PIO instance number (0, 1, …)
See also
gpio_function
4.1.15.10.14. pio_get_gpio_base
static uint pio_get_gpio_base (PIO pio) [inline], [static]
Return the base GPIO base for the PIO instance.
This method always return 0 in RP2040
Parameters
pio
The PIO instance; e.g. pio0 or pio1
Returns
the current GPIO base for the PIO instance
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 211

4.1.15.10.15. pio_get_index
static uint pio_get_index (PIO pio) [inline], [static]
Return the instance number of a PIO instance.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
Returns
the PIO instance number (0, 1, …)
4.1.15.10.16. pio_get_instance
static PIO pio_get_instance (uint instance) [inline], [static]
Convert PIO instance to hardware instance.
Parameters
instance
Instance of PIO, 0 or 1
Returns
the PIO hardware instance
4.1.15.10.17. pio_get_irq_num
static int pio_get_irq_num (PIO pio, uint irqn) [inline], [static]
Return an IRQ for a PIO hardware instance.
Parameters
pio
PIO hardware instance
irqn
0 for PIOx_IRQ_0 or 1 for PIOx_IRQ_1 etc where x is the PIO number
Returns
The IRQ number to use for the PIO
4.1.15.10.18. pio_get_rx_fifo_not_empty_interrupt_source
static pio_interrupt_source_t pio_get_rx_fifo_not_empty_interrupt_source (uint sm) [inline], [static]
Return the interrupt source for a state machines RX FIFO not empty interrupt.
Parameters
sm
State machine index (0..3)
Returns
The interrupt source number for use in pio_set_irqn_source_enabled or similar functions
4.1.15.10.19. pio_get_tx_fifo_not_full_interrupt_source
static pio_interrupt_source_t pio_get_tx_fifo_not_full_interrupt_source (uint sm) [inline], [static]
Return the interrupt source for a state machines TX FIFO not full interrupt.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 212

sm
State machine index (0..3)
Returns
The interrupt source number for use in pio_set_irqn_source_enabled or similar functions
4.1.15.10.20. pio_gpio_init
static void pio_gpio_init (PIO pio, uint pin) [inline], [static]
Setup the function select for a GPIO to use output from the given PIO instance.
PIO appears as an alternate function in the GPIO muxing, just like an SPI or UART. This function configures that
multiplexing to connect a given PIO instance to a GPIO. Note that this is not necessary for a state machine to be able to
read the input value from a GPIO, but only for it to set the output value or output enable.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
pin
the GPIO pin whose function select to set
4.1.15.10.21. pio_interrupt_clear
static void pio_interrupt_clear (PIO pio, uint pio_interrupt_num) [inline], [static]
Clear a particular PIO interrupt.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
pio_interrupt_num
the PIO interrupt number 0-7
4.1.15.10.22. pio_interrupt_get
static bool pio_interrupt_get (PIO pio, uint pio_interrupt_num) [inline], [static]
Determine if a particular PIO interrupt is set.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
pio_interrupt_num
the PIO interrupt number 0-7
Returns
true if corresponding PIO interrupt is currently set
4.1.15.10.23. pio_remove_program
void pio_remove_program (PIO pio, const pio_program_t * program, uint loaded_offset)
Remove a program from a PIO instance’s instruction memory.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
program
the program definition
loaded_offset
the loaded offset returned when the program was added
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 213

4.1.15.10.24. pio_remove_program_and_unclaim_sm
void pio_remove_program_and_unclaim_sm (const pio_program_t * program, PIO pio, uint sm, uint offset)
Removes a program from PIO memory and unclaims the state machine.
Parameters
program
PIO program to remove from memory
pio
PIO hardware instance being used
sm
PIO state machine that was claimed
offset
offset of the program in PIO memory
See also
pio_claim_free_sm_and_add_program
4.1.15.10.25. pio_restart_sm_mask
static void pio_restart_sm_mask (PIO pio, uint32_t mask) [inline], [static]
Restart multiple state machine with a known state.
This method clears the ISR, shift counters, clock divider counter pin write flags, delay counter, latched EXEC instruction,
and IRQ wait condition.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
mask
bit mask of state machine indexes to modify the enabled state of
4.1.15.10.26. pio_set_gpio_base
int pio_set_gpio_base (PIO pio, uint gpio_base)
Set the base GPIO base for the PIO instance.
Since an individual PIO accesses only 32 pins, to be able to access more pins, the PIO instance must specify a base
GPIO where the instance’s "pin 0" maps. For RP2350 the valid values are 0 and 16, indicating the PIO instance has
access to pins 0-31, or 16-47 respectively.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
gpio_base
the GPIO base (either 0 or 16)
Returns
PICO_OK (0) on success, error code otherwise
4.1.15.10.27. pio_set_irq0_source_enabled
static void pio_set_irq0_source_enabled (PIO pio, pio_interrupt_source_t source, bool enabled) [inline], [static]
Enable/Disable a single source on a PIO’s IRQ 0.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
source
the source number (see pio_interrupt_source)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 214

enabled
true to enable IRQ 0 for the source, false to disable.
4.1.15.10.28. pio_set_irq0_source_mask_enabled
static void pio_set_irq0_source_mask_enabled (PIO pio, uint32_t source_mask, bool enabled) [inline], [static]
Enable/Disable multiple sources on a PIO’s IRQ 0.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
source_mask
Mask of bits, one for each source number (see pio_interrupt_source) to affect
enabled
true to enable all the sources specified in the mask on IRQ 0, false to disable all the sources
specified in the mask on IRQ 0
4.1.15.10.29. pio_set_irq1_source_enabled
static void pio_set_irq1_source_enabled (PIO pio, pio_interrupt_source_t source, bool enabled) [inline], [static]
Enable/Disable a single source on a PIO’s IRQ 1.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
source
the source number (see pio_interrupt_source)
enabled
true to enable IRQ 0 for the source, false to disable.
4.1.15.10.30. pio_set_irq1_source_mask_enabled
static void pio_set_irq1_source_mask_enabled (PIO pio, uint32_t source_mask, bool enabled) [inline], [static]
Enable/Disable multiple sources on a PIO’s IRQ 1.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
source_mask
Mask of bits, one for each source number (see pio_interrupt_source) to affect
enabled
true to enable all the sources specified in the mask on IRQ 1, false to disable all the source
specified in the mask on IRQ 1
4.1.15.10.31. pio_set_irqn_source_enabled
static void pio_set_irqn_source_enabled (PIO pio, uint irq_index, pio_interrupt_source_t source, bool enabled) [inline],
[static]
Enable/Disable a single source on a PIO’s specified (0/1) IRQ index.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
irq_index
the IRQ index; either 0 or 1
source
the source number (see pio_interrupt_source)
enabled
true to enable the source on the specified IRQ, false to disable.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 215

4.1.15.10.32. pio_set_irqn_source_mask_enabled
static void pio_set_irqn_source_mask_enabled (PIO pio, uint irq_index, uint32_t source_mask, bool enabled) [inline],
[static]
Enable/Disable multiple sources on a PIO’s specified (0/1) IRQ index.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
irq_index
the IRQ index; either 0 or 1
source_mask
Mask of bits, one for each source number (see pio_interrupt_source) to affect
enabled
true to enable all the sources specified in the mask on the specified IRQ, false to disable all the
sources specified in the mask on the specified IRQ
4.1.15.10.33. pio_set_sm_mask_enabled
static void pio_set_sm_mask_enabled (PIO pio, uint32_t mask, bool enabled) [inline], [static]
Enable or disable multiple PIO state machines.
Note that this method just sets the enabled state of the state machine; if now enabled they continue exactly from where
they left off.
See also
pio_enable_sm_mask_in_sync() if you wish to enable multiple state machines and ensure their clock dividers are in
sync.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
mask
bit mask of state machine indexes to modify the enabled state of
enabled
true to enable the state machines; false to disable
4.1.15.10.34. pio_sm_claim
void pio_sm_claim (PIO pio, uint sm)
Mark a state machine as used.
Method for cooperative claiming of hardware. Will cause a panic if the state machine is already claimed. Use of this
method by libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
4.1.15.10.35. pio_sm_clear_fifos
static void pio_sm_clear_fifos (PIO pio, uint sm) [inline], [static]
Clear a state machine’s TX and RX FIFOs.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 216

4.1.15.10.36. pio_sm_clkdiv_restart
static void pio_sm_clkdiv_restart (PIO pio, uint sm) [inline], [static]
Restart a state machine’s clock divider from a phase of 0.
Each state machine’s clock divider is a free-running piece of hardware, that generates a pattern of clock enable pulses
for the state machine, based only on the configured integer/fractional divisor. The pattern of running/halted cycles
slows the state machine’s execution to some controlled rate.
This function clears the divider’s integer and fractional phase accumulators so that it restarts this pattern from the
beginning. It is called automatically by pio_sm_init() but can also be called at a later time, when you enable the state
machine, to ensure precisely consistent timing each time you load and run a given PIO program.
More commonly this hardware mechanism is used to synchronise the execution clocks of multiple state machines –
see pio_clkdiv_restart_sm_mask().
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
4.1.15.10.37. pio_sm_drain_tx_fifo
void pio_sm_drain_tx_fifo (PIO pio, uint sm)
Empty out a state machine’s TX FIFO.
This method executes pull instructions on the state machine until the TX FIFO is empty. This disturbs the contents of
the OSR, so see also pio_sm_clear_fifos() which clears both FIFOs but leaves the state machine’s internal state
undisturbed.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
See also
pio_sm_clear_fifos()
4.1.15.10.38. pio_sm_exec
static void pio_sm_exec (PIO pio, uint sm, uint instr) [inline], [static]
Immediately execute an instruction on a state machine.
This instruction is executed instead of the next instruction in the normal control flow on the state machine. Subsequent
calls to this method replace the previous executed instruction if it is still running.
See also
pio_sm_is_exec_stalled() to see if an executed instruction is still running (i.e. it is stalled on some condition)
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
instr
the encoded PIO instruction
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 217

4.1.15.10.39. pio_sm_exec_wait_blocking
static void pio_sm_exec_wait_blocking (PIO pio, uint sm, uint instr) [inline], [static]
Immediately execute an instruction on a state machine and wait for it to complete.
This instruction is executed instead of the next instruction in the normal control flow on the state machine. Subsequent
calls to this method replace the previous executed instruction if it is still running.
See also
pio_sm_is_exec_stalled() to see if an executed instruction is still running (i.e. it is stalled on some condition)
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
instr
the encoded PIO instruction
4.1.15.10.40. pio_sm_get
static uint32_t pio_sm_get (PIO pio, uint sm) [inline], [static]
Read a word of data from a state machine’s RX FIFO.
This is a raw FIFO access that does not check for emptiness. If the FIFO is empty, the hardware ignores the attempt to
read from the FIFO (the FIFO remains in an empty state following the read) and the sticky RXUNDER flag for this FIFO is
set in FDEBUG to indicate that the system tried to read from this FIFO when empty. The data returned by this function is
undefined when the FIFO is empty.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
See also
pio_sm_get_blocking()
4.1.15.10.41. pio_sm_get_blocking
static uint32_t pio_sm_get_blocking (PIO pio, uint sm) [inline], [static]
Read a word of data from a state machine’s RX FIFO, blocking if the FIFO is empty.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
4.1.15.10.42. pio_sm_get_pc
static uint8_t pio_sm_get_pc (PIO pio, uint sm) [inline], [static]
Return the current program counter for a state machine.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 218

the program counter
4.1.15.10.43. pio_sm_get_rx_fifo_level
static uint pio_sm_get_rx_fifo_level (PIO pio, uint sm) [inline], [static]
Return the number of elements currently in a state machine’s RX FIFO.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
the number of elements in the RX FIFO
4.1.15.10.44. pio_sm_get_tx_fifo_level
static uint pio_sm_get_tx_fifo_level (PIO pio, uint sm) [inline], [static]
Return the number of elements currently in a state machine’s TX FIFO.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
the number of elements in the TX FIFO
4.1.15.10.45. pio_sm_is_claimed
bool pio_sm_is_claimed (PIO pio, uint sm)
Determine if a PIO state machine is claimed.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
true if claimed, false otherwise
See also
pio_sm_claim
pio_claim_sm_mask
4.1.15.10.46. pio_sm_is_exec_stalled
static bool pio_sm_is_exec_stalled (PIO pio, uint sm) [inline], [static]
Determine if an instruction set by pio_sm_exec() is stalled executing.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 219

sm
State machine index (0..3)
Returns
true if the executed instruction is still running (stalled)
4.1.15.10.47. pio_sm_is_rx_fifo_empty
static bool pio_sm_is_rx_fifo_empty (PIO pio, uint sm) [inline], [static]
Determine if a state machine’s RX FIFO is empty.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
true if the RX FIFO is empty
4.1.15.10.48. pio_sm_is_rx_fifo_full
static bool pio_sm_is_rx_fifo_full (PIO pio, uint sm) [inline], [static]
Determine if a state machine’s RX FIFO is full.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
true if the RX FIFO is full
4.1.15.10.49. pio_sm_is_tx_fifo_empty
static bool pio_sm_is_tx_fifo_empty (PIO pio, uint sm) [inline], [static]
Determine if a state machine’s TX FIFO is empty.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Returns
true if the TX FIFO is empty
4.1.15.10.50. pio_sm_is_tx_fifo_full
static bool pio_sm_is_tx_fifo_full (PIO pio, uint sm) [inline], [static]
Determine if a state machine’s TX FIFO is full.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 220

Returns
true if the TX FIFO is full
4.1.15.10.51. pio_sm_put
static void pio_sm_put (PIO pio, uint sm, uint32_t data) [inline], [static]
Write a word of data to a state machine’s TX FIFO.
This is a raw FIFO access that does not check for fullness. If the FIFO is full, the FIFO contents and state are not
affected by the write attempt. Hardware sets the TXOVER sticky flag for this FIFO in FDEBUG, to indicate that the
system attempted to write to a full FIFO.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
data
the 32 bit data value
See also
pio_sm_put_blocking()
4.1.15.10.52. pio_sm_put_blocking
static void pio_sm_put_blocking (PIO pio, uint sm, uint32_t data) [inline], [static]
Write a word of data to a state machine’s TX FIFO, blocking if the FIFO is full.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
data
the 32 bit data value
4.1.15.10.53. pio_sm_restart
static void pio_sm_restart (PIO pio, uint sm) [inline], [static]
Restart a state machine with a known state.
This method clears the ISR, shift counters, clock divider counter pin write flags, delay counter, latched EXEC instruction,
and IRQ wait condition.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
4.1.15.10.54. pio_sm_set_clkdiv
static void pio_sm_set_clkdiv (PIO pio, uint sm, float div) [inline], [static]
set the current clock divider for a state machine
Parameters
pio
The PIO instance; e.g. pio0 or pio1
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 221

sm
State machine index (0..3)
div
the floating point clock divider
4.1.15.10.55. pio_sm_set_clkdiv_int_frac
static void pio_sm_set_clkdiv_int_frac (PIO pio, uint sm, uint16_t div_int, uint8_t div_frac) [inline], [static]
set the current clock divider for a state machine using a 16:8 fraction
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
div_int
the integer part of the clock divider
div_frac
the fractional part of the clock divider in 1/256s
4.1.15.10.56. pio_sm_set_config
static int pio_sm_set_config (PIO pio, uint sm, const pio_sm_config * config) [inline], [static]
Apply a state machine configuration to a state machine.
Parameters
pio
Handle to PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
config
the configuration to apply
Returns
PICO_OK (0) on success, negative error code otherwise
4.1.15.10.57. pio_sm_set_consecutive_pindirs
int pio_sm_set_consecutive_pindirs (PIO pio, uint sm, uint pins_base, uint pin_count, bool is_out)
Use a state machine to set the same pin direction for multiple consecutive pins for the PIO instance.
This method repeatedly reconfigures the target state machine’s pin configuration and executes 'set' instructions to set
the pin direction on consecutive pins, before restoring the state machine’s pin configuration to what it was.
This method is provided as a convenience to set initial pin directions, and should not be used against a state machine
that is enabled.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3) to use
pins_base
the first pin to set a direction for
pin_count
the count of consecutive pins to set the direction for
is_out
the direction to set; true = out, false = in
Returns
PICO_OK (0) on success, error code otherwise
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 222

4.1.15.10.58. pio_sm_set_enabled
static void pio_sm_set_enabled (PIO pio, uint sm, bool enabled) [inline], [static]
Enable or disable a PIO state machine.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
enabled
true to enable the state machine; false to disable
4.1.15.10.59. pio_sm_set_in_pins
static void pio_sm_set_in_pins (PIO pio, uint sm, uint in_base) [inline], [static]
Set the current 'in' pins for a state machine.
'in' pins can overlap with the 'out', 'set' and 'sideset' pins
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
in_base
0-31 First pin to use as input
4.1.15.10.60. pio_sm_set_jmp_pin
static void pio_sm_set_jmp_pin (PIO pio, uint sm, uint pin) [inline], [static]
Set the 'jmp' pin for a state machine.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
pin
The raw GPIO pin number to use as the source for a jmp pin instruction
4.1.15.10.61. pio_sm_set_out_pins
static void pio_sm_set_out_pins (PIO pio, uint sm, uint out_base, uint out_count) [inline], [static]
Set the current 'out' pins for a state machine.
'out' pins can overlap with the 'in', 'set' and 'sideset' pins
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
out_base
0-31 First pin to set as output
out_count
0-32 Number of pins to set.
4.1.15.10.62. pio_sm_set_pindirs_with_mask
void pio_sm_set_pindirs_with_mask (PIO pio, uint sm, uint32_t pin_dirs, uint32_t pin_mask)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 223

Use a state machine to set the pin directions for multiple pins for the PIO instance.
This method repeatedly reconfigures the target state machine’s pin configuration and executes 'set' instructions to set
pin directions on up to 32 pins, before restoring the state machine’s pin configuration to what it was.
This method is provided as a convenience to set initial pin directions, and should not be used against a state machine
that is enabled.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3) to use
pin_dirs
the pin directions to set - 1 = out, 0 = in (if the corresponding bit in pin_mask is set)
pin_mask
a bit for each pin to indicate whether the corresponding pin_value for that pin should be applied.
4.1.15.10.63. pio_sm_set_pins
void pio_sm_set_pins (PIO pio, uint sm, uint32_t pin_values)
Use a state machine to set a value on all pins for the PIO instance.
This method repeatedly reconfigures the target state machine’s pin configuration and executes 'set' instructions to set
values on all 32 pins, before restoring the state machine’s pin configuration to what it was.
This method is provided as a convenience to set initial pin states, and should not be used against a state machine that
is enabled.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3) to use
pin_values
the pin values to set
4.1.15.10.64. pio_sm_set_pins_with_mask
void pio_sm_set_pins_with_mask (PIO pio, uint sm, uint32_t pin_values, uint32_t pin_mask)
Use a state machine to set a value on multiple pins for the PIO instance.
This method repeatedly reconfigures the target state machine’s pin configuration and executes 'set' instructions to set
values on up to 32 pins, before restoring the state machine’s pin configuration to what it was.
This method is provided as a convenience to set initial pin states, and should not be used against a state machine that
is enabled.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3) to use
pin_values
the pin values to set (if the corresponding bit in pin_mask is set)
pin_mask
a bit for each pin to indicate whether the corresponding pin_value for that pin should be applied.
4.1.15.10.65. pio_sm_set_set_pins
static void pio_sm_set_set_pins (PIO pio, uint sm, uint set_base, uint set_count) [inline], [static]
Set the current 'set' pins for a state machine.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 224

'set' pins can overlap with the 'in', 'out' and 'sideset' pins
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
set_base
0-31 First pin to set as
set_count
0-5 Number of pins to set.
4.1.15.10.66. pio_sm_set_sideset_pins
static void pio_sm_set_sideset_pins (PIO pio, uint sm, uint sideset_base) [inline], [static]
Set the current 'sideset' pins for a state machine.
'sideset' pins can overlap with the 'in', 'out' and 'set' pins
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
sideset_base
0-31 base pin for 'side set'
4.1.15.10.67. pio_sm_set_wrap
static void pio_sm_set_wrap (PIO pio, uint sm, uint wrap_target, uint wrap) [inline], [static]
Set the current wrap configuration for a state machine.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
wrap_target
the instruction memory address to wrap to
wrap
the instruction memory address after which to set the program counter to wrap_target if the
instruction does not itself update the program_counter
4.1.15.10.68. pio_sm_unclaim
void pio_sm_unclaim (PIO pio, uint sm)
Mark a state machine as no longer used.
Method for cooperative claiming of hardware.
Parameters
pio
The PIO instance; e.g. pio0 or pio1
sm
State machine index (0..3)
4.1.15.11. sm_config
PIO state machine configuration .
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 225

4.1.15.11.1. Detailed Description
A PIO block needs to be configured, these functions provide helpers to set up configuration structures. See
pio_sm_set_config
4.1.15.11.2. Functions
static void sm_config_set_out_pin_base (pio_sm_config *c, uint out_base)
Set the base of the 'out' pins in a state machine configuration.
static void sm_config_set_out_pin_count (pio_sm_config *c, uint out_count)
Set the number of 'out' pins in a state machine configuration.
static void sm_config_set_out_pins (pio_sm_config *c, uint out_base, uint out_count)
Set the 'out' pins in a state machine configuration.
static void sm_config_set_set_pin_base (pio_sm_config *c, uint set_base)
Set the base of the 'set' pins in a state machine configuration.
static void sm_config_set_set_pin_count (pio_sm_config *c, uint set_count)
Set the count of 'set' pins in a state machine configuration.
static void sm_config_set_set_pins (pio_sm_config *c, uint set_base, uint set_count)
Set the 'set' pins in a state machine configuration.
static void sm_config_set_in_pin_base (pio_sm_config *c, uint in_base)
Set the base of the 'in' pins in a state machine configuration.
static void sm_config_set_in_pins (pio_sm_config *c, uint in_base)
Set the base fpr the 'in' pins in a state machine configuration.
static void sm_config_set_sideset_pin_base (pio_sm_config *c, uint sideset_base)
Set the base of the 'sideset' pins in a state machine configuration.
static void sm_config_set_sideset_pins (pio_sm_config *c, uint sideset_base)
Set the 'sideset' pins in a state machine configuration.
static void sm_config_set_sideset (pio_sm_config *c, uint bit_count, bool optional, bool pindirs)
Set the 'sideset' options in a state machine configuration.
static void sm_config_set_clkdiv_int_frac (pio_sm_config *c, uint16_t div_int, uint8_t div_frac)
Set the state machine clock divider (from integer and fractional parts - 16:8) in a state machine configuration.
static void sm_config_set_clkdiv (pio_sm_config *c, float div)
Set the state machine clock divider (from a floating point value) in a state machine configuration.
static void sm_config_set_wrap (pio_sm_config *c, uint wrap_target, uint wrap)
Set the wrap addresses in a state machine configuration.
static void sm_config_set_jmp_pin (pio_sm_config *c, uint pin)
Set the 'jmp' pin in a state machine configuration.
static void sm_config_set_in_shift (pio_sm_config *c, bool shift_right, bool autopush, uint push_threshold)
Setup 'in' shifting parameters in a state machine configuration.
static void sm_config_set_out_shift (pio_sm_config *c, bool shift_right, bool autopull, uint pull_threshold)
Setup 'out' shifting parameters in a state machine configuration.
static void sm_config_set_fifo_join (pio_sm_config *c, enum pio_fifo_join join)
Setup the FIFO joining in a state machine configuration.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 226

static void sm_config_set_out_special (pio_sm_config *c, bool sticky, bool has_enable_pin, uint enable_pin_index)
Set special 'out' operations in a state machine configuration.
static void sm_config_set_mov_status (pio_sm_config *c, enum pio_mov_status_type status_sel, uint status_n)
Set source for 'mov status' in a state machine configuration.
static pio_sm_config pio_get_default_sm_config (void)
Get the default state machine configuration.
4.1.15.11.3. Function Documentation
pio_get_default_sm_config
static pio_sm_config pio_get_default_sm_config (void) [inline], [static]
Get the default state machine configuration.
Setting Default
Out Pins 32 starting at 0
Set Pins 0 starting at 0
In Pins (base) 0
Side Set Pins (base) 0
Side Set disabled
Wrap wrap=31, wrap_to=0
In Shift shift_direction=right, autopush=false, push_threshold=32
Out Shift shift_direction=right, autopull=false, pull_threshold=32
Jmp Pin 0
Out Special sticky=false, has_enable_pin=false, enable_pin_index=0
Mov Status status_sel=STATUS_TX_LESSTHAN, n=0
Returns
the default state machine configuration which can then be modified.
sm_config_set_clkdiv
static void sm_config_set_clkdiv (pio_sm_config * c, float div) [inline], [static]
Set the state machine clock divider (from a floating point value) in a state machine configuration.
The clock divider slows the state machine’s execution by masking the system clock on some cycles, in a repeating
pattern, so that the state machine does not advance. Effectively this produces a slower clock for the state machine to
run from, which can be used to generate e.g. a particular UART baud rate. See the datasheet for further detail.
Parameters
c
Pointer to the configuration structure to modify
div
The fractional divisor to be set. 1 for full speed. An integer clock divisor of n will cause the state machine
to run 1 cycle in every n. Note that for small n, the jitter introduced by a fractional divider (e.g. 2.5) may be
unacceptable although it will depend on the use case.
sm_config_set_clkdiv_int_frac
static void sm_config_set_clkdiv_int_frac (pio_sm_config * c, uint16_t div_int, uint8_t div_frac) [inline], [static]
Set the state machine clock divider (from integer and fractional parts - 16:8) in a state machine configuration.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 227

The clock divider can slow the state machine’s execution to some rate below the system clock frequency, by enabling
the state machine on some cycles but not on others, in a regular pattern. This can be used to generate e.g. a given
UART baud rate. See the datasheet for further detail.
Parameters
c
Pointer to the configuration structure to modify
div_int
Integer part of the divisor
div_frac
Fractional part in 1/256ths
See also
sm_config_set_clkdiv()
sm_config_set_fifo_join
static void sm_config_set_fifo_join (pio_sm_config * c, enum pio_fifo_join join) [inline], [static]
Setup the FIFO joining in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
join
Specifies the join type.
See also
enum pio_fifo_join
sm_config_set_in_pin_base
static void sm_config_set_in_pin_base (pio_sm_config * c, uint in_base) [inline], [static]
Set the base of the 'in' pins in a state machine configuration.
'in' pins can overlap with the 'out', 'set' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
in_base
0-31 First pin to use as input
sm_config_set_in_pins
static void sm_config_set_in_pins (pio_sm_config * c, uint in_base) [inline], [static]
Set the base fpr the 'in' pins in a state machine configuration.
'in' pins can overlap with the 'out', 'set' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
in_base
0-31 First pin to use as input
sm_config_set_in_shift
static void sm_config_set_in_shift (pio_sm_config * c, bool shift_right, bool autopush, uint push_threshold) [inline],
[static]
Setup 'in' shifting parameters in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
shift_right
true to shift ISR to right, false to shift ISR to left
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 228

autopush
whether autopush is enabled
push_threshold
threshold in bits to shift in before auto/conditional re-pushing of the ISR
sm_config_set_jmp_pin
static void sm_config_set_jmp_pin (pio_sm_config * c, uint pin) [inline], [static]
Set the 'jmp' pin in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
pin
The raw GPIO pin number to use as the source for a jmp pin instruction
sm_config_set_mov_status
static void sm_config_set_mov_status (pio_sm_config * c, enum pio_mov_status_type status_sel, uint status_n) [inline],
[static]
Set source for 'mov status' in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
status_sel
the status operation selector.
See also
enum pio_mov_status_type
Parameters
status_n
parameter for the mov status operation (currently a bit count)
sm_config_set_out_pin_base
static void sm_config_set_out_pin_base (pio_sm_config * c, uint out_base) [inline], [static]
Set the base of the 'out' pins in a state machine configuration.
'out' pins can overlap with the 'in', 'set' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
out_base
0-31 First pin to set as output
sm_config_set_out_pin_count
static void sm_config_set_out_pin_count (pio_sm_config * c, uint out_count) [inline], [static]
Set the number of 'out' pins in a state machine configuration.
'out' pins can overlap with the 'in', 'set' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
out_count
0-32 Number of pins to set.
sm_config_set_out_pins
static void sm_config_set_out_pins (pio_sm_config * c, uint out_base, uint out_count) [inline], [static]
Set the 'out' pins in a state machine configuration.
'out' pins can overlap with the 'in', 'set' and 'sideset' pins
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 229

c
Pointer to the configuration structure to modify
out_base
0-31 First pin to set as output
out_count
0-32 Number of pins to set.
sm_config_set_out_shift
static void sm_config_set_out_shift (pio_sm_config * c, bool shift_right, bool autopull, uint pull_threshold) [inline],
[static]
Setup 'out' shifting parameters in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
shift_right
true to shift OSR to right, false to shift OSR to left
autopull
whether autopull is enabled
pull_threshold
threshold in bits to shift out before auto/conditional re-pulling of the OSR
sm_config_set_out_special
static void sm_config_set_out_special (pio_sm_config * c, bool sticky, bool has_enable_pin, uint enable_pin_index)
[inline], [static]
Set special 'out' operations in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
sticky
to enable 'sticky' output (i.e. re-asserting most recent OUT/SET pin values on subsequent
cycles)
has_enable_pin
true to enable auxiliary OUT enable pin
enable_pin_index
pin index for auxiliary OUT enable
sm_config_set_set_pin_base
static void sm_config_set_set_pin_base (pio_sm_config * c, uint set_base) [inline], [static]
Set the base of the 'set' pins in a state machine configuration.
'set' pins can overlap with the 'in', 'out' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
set_base
0-31 First pin to set as
sm_config_set_set_pin_count
static void sm_config_set_set_pin_count (pio_sm_config * c, uint set_count) [inline], [static]
Set the count of 'set' pins in a state machine configuration.
'set' pins can overlap with the 'in', 'out' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
set_count
0-5 Number of pins to set.
sm_config_set_set_pins
static void sm_config_set_set_pins (pio_sm_config * c, uint set_base, uint set_count) [inline], [static]
Set the 'set' pins in a state machine configuration.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 230

'set' pins can overlap with the 'in', 'out' and 'sideset' pins
Parameters
c
Pointer to the configuration structure to modify
set_base
0-31 First pin to set as
set_count
0-5 Number of pins to set.
sm_config_set_sideset
static void sm_config_set_sideset (pio_sm_config * c, uint bit_count, bool optional, bool pindirs) [inline], [static]
Set the 'sideset' options in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
bit_count
Number of bits to steal from delay field in the instruction for use of side set (max 5)
optional
True if the topmost side set bit is used as a flag for whether to apply side set on that instruction
pindirs
True if the side set affects pin directions rather than values
sm_config_set_sideset_pin_base
static void sm_config_set_sideset_pin_base (pio_sm_config * c, uint sideset_base) [inline], [static]
Set the base of the 'sideset' pins in a state machine configuration.
'sideset' pins can overlap with the 'in', 'out' and 'set' pins
Parameters
c
Pointer to the configuration structure to modify
sideset_base
0-31 base pin for 'side set'
sm_config_set_sideset_pins
static void sm_config_set_sideset_pins (pio_sm_config * c, uint sideset_base) [inline], [static]
Set the 'sideset' pins in a state machine configuration.
This method is identical to sm_config_set_sideset_pin_base, and is provided for backwards compatibility
'sideset' pins can overlap with the 'in', 'out' and 'set' pins
Parameters
c
Pointer to the configuration structure to modify
sideset_base
0-31 base pin for 'side set'
sm_config_set_wrap
static void sm_config_set_wrap (pio_sm_config * c, uint wrap_target, uint wrap) [inline], [static]
Set the wrap addresses in a state machine configuration.
Parameters
c
Pointer to the configuration structure to modify
wrap_target
the instruction memory address to wrap to
wrap
the instruction memory address after which to set the program counter to wrap_target if the
instruction does not itself update the program_counter
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 231

4.1.15.12. pio_instructions
PIO instruction encoding .
4.1.15.12.1. Detailed Description
Functions for generating PIO instruction encodings programmatically. In debug builds
PARAM_ASSERTIONS_ENABLED_PIO_INSTRUCTIONS can be set to 1 to enable validation of encoding function parameters.
For fuller descriptions of the instructions in question see the "RP2040 Datasheet"
4.1.15.12.2. Enumerations
enum pio_src_dest { pio_pins = 0u, pio_x = 1u, pio_y = 2u, pio_null = 3u | 0x20u | 0x80u, pio_pindirs = 4u | 0x08u |
0x40u | 0x80u, pio_exec_mov = 4u | 0x08u | 0x10u | 0x20u | 0x40u, pio_status = 5u | 0x08u | 0x10u | 0x20u | 0x80u, pio_pc
= 5u | 0x08u | 0x20u | 0x40u, pio_isr = 6u | 0x20u, pio_osr = 7u | 0x10u | 0x20u, pio_exec_out = 7u | 0x08u | 0x20u |
0x40u | 0x80u }
Enumeration of values to pass for source/destination args for instruction encoding functions.
4.1.15.12.3. Functions
static uint pio_encode_delay (uint cycles)
Encode just the delay slot bits of an instruction.
static uint pio_encode_sideset (uint sideset_bit_count, uint value)
Encode just the side set bits of an instruction (in non optional side set mode)
static uint pio_encode_sideset_opt (uint sideset_bit_count, uint value)
Encode just the side set bits of an instruction (in optional -opt side set mode)
static uint pio_encode_jmp (uint addr)
Encode an unconditional JMP instruction.
static uint pio_encode_jmp_not_x (uint addr)
Encode a conditional JMP if scratch X zero instruction.
static uint pio_encode_jmp_x_dec (uint addr)
Encode a conditional JMP if scratch X non-zero (and post-decrement X) instruction.
static uint pio_encode_jmp_not_y (uint addr)
Encode a conditional JMP if scratch Y zero instruction.
static uint pio_encode_jmp_y_dec (uint addr)
Encode a conditional JMP if scratch Y non-zero (and post-decrement Y) instruction.
static uint pio_encode_jmp_x_ne_y (uint addr)
Encode a conditional JMP if scratch X not equal scratch Y instruction.
static uint pio_encode_jmp_pin (uint addr)
Encode a conditional JMP if input pin high instruction.
static uint pio_encode_jmp_not_osre (uint addr)
Encode a conditional JMP if output shift register not empty instruction.
static uint pio_encode_wait_gpio (bool polarity, uint gpio)
Encode a WAIT for GPIO pin instruction.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 232

static uint pio_encode_wait_pin (bool polarity, uint pin)
Encode a WAIT for pin instruction.
static uint pio_encode_wait_irq (bool polarity, bool relative, uint irq)
Encode a WAIT for IRQ instruction.
static uint pio_encode_in (enum pio_src_dest src, uint count)
Encode an IN instruction.
static uint pio_encode_out (enum pio_src_dest dest, uint count)
Encode an OUT instruction.
static uint pio_encode_push (bool if_full, bool block)
Encode a PUSH instruction.
static uint pio_encode_pull (bool if_empty, bool block)
Encode a PULL instruction.
static uint pio_encode_mov (enum pio_src_dest dest, enum pio_src_dest src)
Encode a MOV instruction.
static uint pio_encode_mov_not (enum pio_src_dest dest, enum pio_src_dest src)
Encode a MOV instruction with bit invert.
static uint pio_encode_mov_reverse (enum pio_src_dest dest, enum pio_src_dest src)
Encode a MOV instruction with bit reverse.
static uint pio_encode_irq_set (bool relative, uint irq)
Encode a IRQ SET instruction.
static uint pio_encode_irq_wait (bool relative, uint irq)
Encode a IRQ WAIT instruction.
static uint pio_encode_irq_clear (bool relative, uint irq)
Encode a IRQ CLEAR instruction.
static uint pio_encode_set (enum pio_src_dest dest, uint value)
Encode a SET instruction.
static uint pio_encode_nop (void)
Encode a NOP instruction.
4.1.15.12.4. Enumeration Type Documentation
pio_src_dest
enum pio_src_dest
Enumeration of values to pass for source/destination args for instruction encoding functions.
NOTE
Not all values are suitable for all functions. Validity is only checked in debug mode when
PARAM_ASSERTIONS_ENABLED_PIO_INSTRUCTIONS is 1
4.1.15.12.5. Function Documentation
pio_encode_delay
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 233

static uint pio_encode_delay (uint cycles) [inline], [static]
Encode just the delay slot bits of an instruction.
NOTE
This function does not return a valid instruction encoding; instead it returns an encoding of the delay slot suitable for
`OR`ing with the result of an encoding function for an actual instruction. Care should be taken when combining the
results of this function with the results of pio_encode_sideset and pio_encode_sideset_opt as they share the same
bits within the instruction encoding.
Parameters
cycles
the number of cycles 0-31 (or less if side set is being used)
Returns
the delay slot bits to be ORed with an instruction encoding
pio_encode_in
static uint pio_encode_in (enum pio_src_dest src, uint count) [inline], [static]
Encode an IN instruction.
This is the equivalent of IN <src>, <count>
Parameters
src
The source to take data from
count
The number of bits 1-32
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_irq_clear
static uint pio_encode_irq_clear (bool relative, uint irq) [inline], [static]
Encode a IRQ CLEAR instruction.
This is the equivalent of IRQ CLEAR <irq> <relative>
Parameters
relative
true for a IRQ CLEAR <irq> REL, false for regular IRQ CLEAR <irq>
irq
the irq number 0-7
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_irq_set
static uint pio_encode_irq_set (bool relative, uint irq) [inline], [static]
Encode a IRQ SET instruction.
This is the equivalent of IRQ SET <irq> <relative>
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 234

relative
true for a IRQ SET <irq> REL, false for regular IRQ SET <irq>
irq
the irq number 0-7
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_irq_wait
static uint pio_encode_irq_wait (bool relative, uint irq) [inline], [static]
Encode a IRQ WAIT instruction.
This is the equivalent of IRQ WAIT <irq> <relative>
Parameters
relative
true for a IRQ WAIT <irq> REL, false for regular IRQ WAIT <irq>
irq
the irq number 0-7
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp
static uint pio_encode_jmp (uint addr) [inline], [static]
Encode an unconditional JMP instruction.
This is the equivalent of JMP <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_not_osre
static uint pio_encode_jmp_not_osre (uint addr) [inline], [static]
Encode a conditional JMP if output shift register not empty instruction.
This is the equivalent of JMP !OSRE <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_not_x
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 235

static uint pio_encode_jmp_not_x (uint addr) [inline], [static]
Encode a conditional JMP if scratch X zero instruction.
This is the equivalent of JMP !X <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_not_y
static uint pio_encode_jmp_not_y (uint addr) [inline], [static]
Encode a conditional JMP if scratch Y zero instruction.
This is the equivalent of JMP !Y <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_pin
static uint pio_encode_jmp_pin (uint addr) [inline], [static]
Encode a conditional JMP if input pin high instruction.
This is the equivalent of JMP PIN <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_x_dec
static uint pio_encode_jmp_x_dec (uint addr) [inline], [static]
Encode a conditional JMP if scratch X non-zero (and post-decrement X) instruction.
This is the equivalent of JMP X-- <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 236

pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_x_ne_y
static uint pio_encode_jmp_x_ne_y (uint addr) [inline], [static]
Encode a conditional JMP if scratch X not equal scratch Y instruction.
This is the equivalent of JMP X!=Y <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_jmp_y_dec
static uint pio_encode_jmp_y_dec (uint addr) [inline], [static]
Encode a conditional JMP if scratch Y non-zero (and post-decrement Y) instruction.
This is the equivalent of JMP Y-- <addr>
Parameters
addr
The target address 0-31 (an absolute address within the PIO instruction memory)
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_mov
static uint pio_encode_mov (enum pio_src_dest dest, enum pio_src_dest src) [inline], [static]
Encode a MOV instruction.
This is the equivalent of MOV <dest>, <src>
Parameters
dest
The destination to write data to
src
The source to take data from
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_mov_not
static uint pio_encode_mov_not (enum pio_src_dest dest, enum pio_src_dest src) [inline], [static]
Encode a MOV instruction with bit invert.
This is the equivalent of MOV <dest>, ~<src>
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 237

dest
The destination to write inverted data to
src
The source to take data from
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_mov_reverse
static uint pio_encode_mov_reverse (enum pio_src_dest dest, enum pio_src_dest src) [inline], [static]
Encode a MOV instruction with bit reverse.
This is the equivalent of MOV <dest>, ::<src>
Parameters
dest
The destination to write bit reversed data to
src
The source to take data from
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_nop
static uint pio_encode_nop (void) [inline], [static]
Encode a NOP instruction.
This is the equivalent of NOP which is itself encoded as MOV y, y
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_out
static uint pio_encode_out (enum pio_src_dest dest, uint count) [inline], [static]
Encode an OUT instruction.
This is the equivalent of OUT <src>, <count>
Parameters
dest
The destination to write data to
count
The number of bits 1-32
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_pull
static uint pio_encode_pull (bool if_empty, bool block) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 238

Encode a PULL instruction.
This is the equivalent of PULL <if_empty>, <block>
Parameters
if_empty
true for PULL IF_EMPTY …, false for PULL …
block
true for PULL … BLOCK, false for PULL …
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_push
static uint pio_encode_push (bool if_full, bool block) [inline], [static]
Encode a PUSH instruction.
This is the equivalent of PUSH <if_full>, <block>
Parameters
if_full
true for PUSH IF_FULL …, false for PUSH …
block
true for PUSH … BLOCK, false for PUSH …
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_set
static uint pio_encode_set (enum pio_src_dest dest, uint value) [inline], [static]
Encode a SET instruction.
This is the equivalent of SET <dest>, <value>
Parameters
dest
The destination to apply the value to
value
The value 0-31
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_sideset
static uint pio_encode_sideset (uint sideset_bit_count, uint value) [inline], [static]
Encode just the side set bits of an instruction (in non optional side set mode)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 239

NOTE
This function does not return a valid instruction encoding; instead it returns an encoding of the side set bits suitable
for `OR`ing with the result of an encoding function for an actual instruction. Care should be taken when combining
the results of this function with the results of pio_encode_delay as they share the same bits within the instruction
encoding.
Parameters
sideset_bit_count
number of side set bits as would be specified via .sideset in pioasm
value
the value to sideset on the pins
Returns
the side set bits to be ORed with an instruction encoding
pio_encode_sideset_opt
static uint pio_encode_sideset_opt (uint sideset_bit_count, uint value) [inline], [static]
Encode just the side set bits of an instruction (in optional -opt side set mode)
NOTE
This function does not return a valid instruction encoding; instead it returns an encoding of the side set bits suitable
for `OR`ing with the result of an encoding function for an actual instruction. Care should be taken when combining
the results of this function with the results of pio_encode_delay as they share the same bits within the instruction
encoding.
Parameters
sideset_bit_count
number of side set bits as would be specified via .sideset <n> opt in pioasm
value
the value to sideset on the pins
Returns
the side set bits to be ORed with an instruction encoding
pio_encode_wait_gpio
static uint pio_encode_wait_gpio (bool polarity, uint gpio) [inline], [static]
Encode a WAIT for GPIO pin instruction.
This is the equivalent of WAIT <polarity> GPIO <gpio>
Parameters
polarity
true for WAIT 1, false for WAIT 0
gpio
The real GPIO number 0-31
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_wait_irq
static uint pio_encode_wait_irq (bool polarity, bool relative, uint irq) [inline], [static]
Encode a WAIT for IRQ instruction.
This is the equivalent of WAIT <polarity> IRQ <irq> <relative>
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 240

Parameters
polarity
true for WAIT 1, false for WAIT 0
relative
true for a WAIT IRQ <irq> REL, false for regular WAIT IRQ <irq>
irq
the irq number 0-7
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
pio_encode_wait_pin
static uint pio_encode_wait_pin (bool polarity, uint pin) [inline], [static]
Encode a WAIT for pin instruction.
This is the equivalent of WAIT <polarity> PIN <pin>
Parameters
polarity
true for WAIT 1, false for WAIT 0
pin
The pin number 0-31 relative to the executing SM’s input pin mapping
Returns
The instruction encoding with 0 delay and no side set value
See also
pio_encode_delay, pio_encode_sideset, pio_encode_sideset_opt
4.1.16. hardware_pll
Phase Locked Loop control APIs.
4.1.16.1. Detailed Description
There are two PLLs in RP2040. They are:
•
pll_sys - Used to generate up to a 133MHz system clock
•
pll_usb - Used to generate a 48MHz USB reference clock
For details on how the PLLs are calculated, please refer to the RP2040 datasheet.
4.1.16.2. Macros
•
#define PLL_RESET_NUM(pll)
4.1.16.3. Functions
void pll_init (PLL pll, uint ref_div, uint vco_freq, uint post_div1, uint post_div2)
Initialise specified PLL.
void pll_deinit (PLL pll)
Release/uninitialise specified PLL.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 241

4.1.16.4. Macro Definition Documentation
4.1.16.4.1. PLL_RESET_NUM
#define PLL_RESET_NUM(pll)
Returns the reset_num_t used to reset a given PLL instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.16.5. Function Documentation
4.1.16.5.1. pll_deinit
void pll_deinit (PLL pll)
Release/uninitialise specified PLL.
This will turn off the power to the specified PLL. Note this function does not currently check if the PLL is in use before
powering it off so should be used with care.
Parameters
pll
pll_sys or pll_usb
4.1.16.5.2. pll_init
void pll_init (PLL pll, uint ref_div, uint vco_freq, uint post_div1, uint post_div2)
Initialise specified PLL.
Parameters
pll
pll_sys or pll_usb
ref_div
Input clock divider.
vco_freq
Requested output from the VCO (voltage controlled oscillator)
post_div1
Post Divider 1 - range 1-7. Must be >= post_div2
post_div2
Post Divider 2 - range 1-7
4.1.17. hardware_powman
Power Management API.
4.1.17.1. Enumerations
enum powman_power_domains { POWMAN_POWER_DOMAIN_SRAM_BANK1 = 0, POWMAN_POWER_DOMAIN_SRAM_BANK0 = 1,
POWMAN_POWER_DOMAIN_XIP_CACHE = 2, POWMAN_POWER_DOMAIN_SWITCHED_CORE = 3, POWMAN_POWER_DOMAIN_COUNT = 4 }
Power domains of powman.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 242

4.1.17.2. Functions
void powman_timer_set_1khz_tick_source_lposc (void)
Use the ~32KHz low power oscillator as the powman timer source.
void powman_timer_set_1khz_tick_source_lposc_with_hz (uint32_t lposc_freq_hz)
Use the low power oscillator (specifying frequency) as the powman timer source.
void powman_timer_set_1khz_tick_source_xosc (void)
Use the crystal oscillator as the powman timer source.
void powman_timer_set_1khz_tick_source_xosc_with_hz (uint32_t xosc_freq_hz)
Use the crystal oscillator as the powman timer source.
void powman_timer_set_1khz_tick_source_gpio (uint32_t gpio)
Use a 1KHz external tick as the powman timer source.
void powman_timer_enable_gpio_1hz_sync (uint32_t gpio)
Use a 1Hz external signal as the powman timer source for seconds only.
void powman_timer_disable_gpio_1hz_sync (void)
Stop using 1Hz external signal as the powman timer source for seconds.
uint64_t powman_timer_get_ms (void)
Returns current time in ms.
void powman_timer_set_ms (uint64_t time_ms)
Set current time in ms.
void powman_timer_enable_alarm_at_ms (uint64_t alarm_time_ms)
Set an alarm at an absolute time in ms.
void powman_timer_disable_alarm (void)
Disable the alarm.
static void powman_set_bits (volatile uint32_t *reg, uint32_t bits)
hw_set_bits helper function
static void powman_clear_bits (volatile uint32_t *reg, uint32_t bits)
hw_clear_bits helper function
static bool powman_timer_is_running (void)
Determine if the powman timer is running.
static void powman_timer_stop (void)
Stop the powman timer.
static void powman_timer_start (void)
Start the powman timer.
static void powman_clear_alarm (void)
Clears the powman alarm.
powman_power_state powman_get_power_state (void)
Get the current power state.
int powman_set_power_state (powman_power_state state)
Set the power state.
static powman_power_state powman_power_state_with_domain_on (powman_power_state orig, enum powman_power_domains domain)
Helper function modify a powman_power_state to turn a domain on.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 243

static powman_power_state powman_power_state_with_domain_off (powman_power_state orig, enum powman_power_domains domain)
Helper function modify a powman_power_state to turn a domain off.
static bool powman_power_state_is_domain_on (powman_power_state state, enum powman_power_domains domain)
Helper function to check if a domain is on in a given powman_power_state.
void powman_enable_alarm_wakeup_at_ms (uint64_t alarm_time_ms)
Wake up from an alarm at a given time.
void powman_enable_gpio_wakeup (uint gpio_wakeup_num, uint32_t gpio, bool edge, bool high)
Wake up from a gpio.
void powman_disable_alarm_wakeup (void)
Disable waking up from alarm.
void powman_disable_gpio_wakeup (uint gpio_wakeup_num)
Disable wake up from a gpio.
void powman_disable_all_wakeups (void)
Disable all wakeup sources.
bool powman_configure_wakeup_state (powman_power_state sleep_state, powman_power_state wakeup_state)
Configure sleep state and wakeup state.
static void powman_set_debug_power_request_ignored (bool ignored)
Ignore wake up when the debugger is attached.
4.1.17.3. Enumeration Type Documentation
4.1.17.3.1. powman_power_domains
enum powman_power_domains
Power domains of powman.
Table 26. Enumerator
POWMAN_POWER_DOMAIN_SRAM_BANK1
bank1 includes the top 256K of sram plus sram 8 and 9
(scratch x and scratch y)
POWMAN_POWER_DOMAIN_SRAM_BANK0
bank0 is bottom 256K of sSRAM
POWMAN_POWER_DOMAIN_XIP_CACHE
XIP cache is 2x8K instances.
POWMAN_POWER_DOMAIN_SWITCHED_CORE
Switched core logic (processors, busfabric, peris etc)
4.1.17.4. Function Documentation
4.1.17.4.1. powman_clear_alarm
static void powman_clear_alarm (void) [inline], [static]
Clears the powman alarm.
Note, the alarm must be disabled (see powman_timer_disable_alarm) before clearing the alarm, as the alarm fires if the
time is greater than equal to the target, so once the time has passed the alarm will always fire while enabled.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 244

4.1.17.4.2. powman_clear_bits
static void powman_clear_bits (volatile uint32_t * reg, uint32_t bits) [inline], [static]
hw_clear_bits helper function
Powman needs a password for writes, to prevent accidentally writing to it. This function implements hw_clear_bits with
an appropriate password.
Parameters
reg
register to clear
bits
bits of register to clear
4.1.17.4.3. powman_configure_wakeup_state
bool powman_configure_wakeup_state (powman_power_state sleep_state, powman_power_state wakeup_state)
Configure sleep state and wakeup state.
Parameters
sleep_state
power state powman will go to when sleeping, used to validate the wakeup state
wakeup_state
power state powman will go to when waking up. Note switched core and xip always power up.
SRAM bank0 and bank1 can be left powered off
Returns
true if the state is valid, false if not
4.1.17.4.4. powman_disable_alarm_wakeup
void powman_disable_alarm_wakeup (void)
Disable waking up from alarm.
4.1.17.4.5. powman_disable_all_wakeups
void powman_disable_all_wakeups (void)
Disable all wakeup sources.
4.1.17.4.6. powman_disable_gpio_wakeup
void powman_disable_gpio_wakeup (uint gpio_wakeup_num)
Disable wake up from a gpio.
Parameters
gpio_wakeup_num
hardware wakeup instance to use (0-3)
4.1.17.4.7. powman_enable_alarm_wakeup_at_ms
void powman_enable_alarm_wakeup_at_ms (uint64_t alarm_time_ms)
Wake up from an alarm at a given time.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 245

alarm_time_ms
time to wake up in ms
4.1.17.4.8. powman_enable_gpio_wakeup
void powman_enable_gpio_wakeup (uint gpio_wakeup_num, uint32_t gpio, bool edge, bool high)
Wake up from a gpio.
Parameters
gpio_wakeup_num
hardware wakeup instance to use (0-3)
gpio
gpio to wake up from (0-47)
edge
true for edge sensitive, false for level sensitive
high
true for active high, false active low
4.1.17.4.9. powman_get_power_state
powman_power_state powman_get_power_state (void)
Get the current power state.
4.1.17.4.10. powman_power_state_is_domain_on
static bool powman_power_state_is_domain_on (powman_power_state state, enum powman_power_domains domain) [inline],
[static]
Helper function to check if a domain is on in a given powman_power_state.
Parameters
state
powman_power_state
domain
domain to check is on
4.1.17.4.11. powman_power_state_with_domain_off
static powman_power_state powman_power_state_with_domain_off (powman_power_state orig, enum powman_power_domains domain)
[inline], [static]
Helper function modify a powman_power_state to turn a domain off.
Parameters
orig
original state
domain
domain to turn off
4.1.17.4.12. powman_power_state_with_domain_on
static powman_power_state powman_power_state_with_domain_on (powman_power_state orig, enum powman_power_domains domain)
[inline], [static]
Helper function modify a powman_power_state to turn a domain on.
Parameters
orig
original state
domain
domain to turn on
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 246

4.1.17.4.13. powman_set_bits
static void powman_set_bits (volatile uint32_t * reg, uint32_t bits) [inline], [static]
hw_set_bits helper function
Parameters
reg
register to set
bits
bits of register to set Powman needs a password for writes, to prevent accidentally writing to it. This
function implements hw_set_bits with an appropriate password.
4.1.17.4.14. powman_set_debug_power_request_ignored
static void powman_set_debug_power_request_ignored (bool ignored) [inline], [static]
Ignore wake up when the debugger is attached.
Typically, when a debugger is attached it will assert the pwrupreq signal. OpenOCD does not clear this signal, even when
you quit. This means once you have attached a debugger powman will never go to sleep. This function lets you ignore
the debugger pwrupreq which means you can go to sleep with a debugger attached. The debugger will error out if you
go to turn off the switch core with it attached, as the processors have been powered off.
Parameters
ignored
should the debugger power up request be ignored
4.1.17.4.15. powman_set_power_state
int powman_set_power_state (powman_power_state state)
Set the power state.
Check the desired state is valid. Powman will go to the state if it is valid and there are no pending power up requests.
Note that if you are turning off the switched core then this function will never return as the processor will have been
turned off at the end.
Parameters
state
the power state to go to
Returns
PICO_OK if the state is valid. Misc PICO_ERRORs are returned if not
4.1.17.4.16. powman_timer_disable_alarm
void powman_timer_disable_alarm (void)
Disable the alarm.
Once an alarm has fired it must be disabled to stop firing as the alarm comparison is alarm = alarm_time >=
current_time
4.1.17.4.17. powman_timer_disable_gpio_1hz_sync
void powman_timer_disable_gpio_1hz_sync (void)
Stop using 1Hz external signal as the powman timer source for seconds.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 247

4.1.17.4.18. powman_timer_enable_alarm_at_ms
void powman_timer_enable_alarm_at_ms (uint64_t alarm_time_ms)
Set an alarm at an absolute time in ms.
Note, the timer is stopped and then restarted as part of this function. This only controls the alarm if you want to use the
alarm to wake up powman then you should use powman_enable_alarm_wakeup_at_ms
Parameters
alarm_time_ms
time at which the alarm will fire
4.1.17.4.19. powman_timer_enable_gpio_1hz_sync
void powman_timer_enable_gpio_1hz_sync (uint32_t gpio)
Use a 1Hz external signal as the powman timer source for seconds only.
Use a 1hz sync signal, such as from a gps for the seconds component of the timer. The milliseconds will still come from
another configured source such as xosc or lposc
Parameters
gpio
the gpio to use. must be 12, 14, 20, 22
4.1.17.4.20. powman_timer_get_ms
uint64_t powman_timer_get_ms (void)
Returns current time in ms.
4.1.17.4.21. powman_timer_is_running
static bool powman_timer_is_running (void) [inline], [static]
Determine if the powman timer is running.
4.1.17.4.22. powman_timer_set_1khz_tick_source_gpio
void powman_timer_set_1khz_tick_source_gpio (uint32_t gpio)
Use a 1KHz external tick as the powman timer source.
Parameters
gpio
the gpio to use. must be 12, 14, 20, 22
4.1.17.4.23. powman_timer_set_1khz_tick_source_lposc
void powman_timer_set_1khz_tick_source_lposc (void)
Use the ~32KHz low power oscillator as the powman timer source.
4.1.17.4.24. powman_timer_set_1khz_tick_source_lposc_with_hz
void powman_timer_set_1khz_tick_source_lposc_with_hz (uint32_t lposc_freq_hz)
Use the low power oscillator (specifying frequency) as the powman timer source.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 248

Parameters
lposc_freq_hz
specify an exact lposc freq to trim it
4.1.17.4.25. powman_timer_set_1khz_tick_source_xosc
void powman_timer_set_1khz_tick_source_xosc (void)
Use the crystal oscillator as the powman timer source.
4.1.17.4.26. powman_timer_set_1khz_tick_source_xosc_with_hz
void powman_timer_set_1khz_tick_source_xosc_with_hz (uint32_t xosc_freq_hz)
Use the crystal oscillator as the powman timer source.
Parameters
xosc_freq_hz
specify a crystal frequency
4.1.17.4.27. powman_timer_set_ms
void powman_timer_set_ms (uint64_t time_ms)
Set current time in ms.
Parameters
time_ms
Current time in ms
4.1.17.4.28. powman_timer_start
static void powman_timer_start (void) [inline], [static]
Start the powman timer.
4.1.17.4.29. powman_timer_stop
static void powman_timer_stop (void) [inline], [static]
Stop the powman timer.
4.1.18. hardware_pwm
Hardware Pulse Width Modulation (PWM) API.
4.1.18.1. Detailed Description
The RP2040 PWM block has 8 identical slices, the RP2350 has 12. Each slice can drive two PWM output signals, or
measure the frequency or duty cycle of an input signal. This gives a total of up to 16/24 controllable PWM outputs. All
30 GPIOs can be driven by the PWM block.
The PWM hardware functions by continuously comparing the input value to a free-running counter. This produces a
toggling output where the amount of time spent at the high output level is proportional to the input value. The fraction of
time spent at the high signal level is known as the duty cycle of the signal.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 249

The default behaviour of a PWM slice is to count upward until the wrap value (pwm_config_set_wrap) is reached, and
then immediately wrap to 0. PWM slices also offer a phase-correct mode, where the counter starts to count downward
after reaching TOP, until it reaches 0 again.
4.1.18.1.1. Example
Ê1 // Output PWM signals on pins 0 and 1
Ê2
Ê3 #include "pico/stdlib.h"
Ê4 #include "hardware/pwm.h"
Ê5
Ê6 int main() {
Ê7
Ê8 // Tell GPIO 0 and 1 they are allocated to the PWM
Ê9 gpio_set_function(0, GPIO_FUNC_PWM);
10 gpio_set_function(1, GPIO_FUNC_PWM);
11
12 // Find out which PWM slice is connected to GPIO 0 (it's slice 0)
13 uint slice_num = pwm_gpio_to_slice_num(0);
14
15 // Set period of 4 cycles (0 to 3 inclusive)
16 pwm_set_wrap(slice_num, 3);
17 // Set channel A output high for one cycle before dropping
18 pwm_set_chan_level(slice_num, PWM_CHAN_A, 1);
19 // Set initial B output high for three cycles before dropping
20 pwm_set_chan_level(slice_num, PWM_CHAN_B, 3);
21 // Set the PWM running
22 pwm_set_enabled(slice_num, true);
23
24 // Note we could also use pwm_set_gpio_level(gpio, x) which looks up the
25 // correct slice and channel for a given GPIO.
26 }
4.1.18.2. Macros
•
#define PWM_DREQ_NUM(slice_num)
•
#define PWM_GPIO_SLICE_NUM(gpio)
•
#define PWM_DEFAULT_IRQ_NUM()
4.1.18.3. Enumerations
enum pwm_clkdiv_mode { PWM_DIV_FREE_RUNNING = 0, PWM_DIV_B_HIGH = 1, PWM_DIV_B_RISING = 2, PWM_DIV_B_FALLING = 3 }
PWM Divider mode settings.
4.1.18.4. Functions
static uint pwm_gpio_to_slice_num (uint gpio)
Determine the PWM slice that is attached to the specified GPIO.
static uint pwm_gpio_to_channel (uint gpio)
Determine the PWM channel that is attached to the specified GPIO.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 250

static void pwm_config_set_phase_correct (pwm_config *c, bool phase_correct)
Set phase correction in a PWM configuration.
static void pwm_config_set_clkdiv (pwm_config *c, float div)
Set PWM clock divider in a PWM configuration.
static void pwm_config_set_clkdiv_int_frac (pwm_config *c, uint8_t integer, uint8_t fract)
Set PWM clock divider in a PWM configuration using an 8:4 fractional value.
static void pwm_config_set_clkdiv_int (pwm_config *c, uint div)
Set PWM clock divider in a PWM configuration.
static void pwm_config_set_clkdiv_mode (pwm_config *c, enum pwm_clkdiv_mode mode)
Set PWM counting mode in a PWM configuration.
static void pwm_config_set_output_polarity (pwm_config *c, bool a, bool b)
Set output polarity in a PWM configuration.
static void pwm_config_set_wrap (pwm_config *c, uint16_t wrap)
Set PWM counter wrap value in a PWM configuration.
static void pwm_init (uint slice_num, pwm_config *c, bool start)
Initialise a PWM with settings from a configuration object.
static pwm_config pwm_get_default_config (void)
Get a set of default values for PWM configuration.
static void pwm_set_wrap (uint slice_num, uint16_t wrap)
Set the current PWM counter wrap value.
static void pwm_set_chan_level (uint slice_num, uint chan, uint16_t level)
Set the current PWM counter compare value for one channel.
static void pwm_set_both_levels (uint slice_num, uint16_t level_a, uint16_t level_b)
Set PWM counter compare values.
static void pwm_set_gpio_level (uint gpio, uint16_t level)
Helper function to set the PWM level for the slice and channel associated with a GPIO.
static uint16_t pwm_get_counter (uint slice_num)
Get PWM counter.
static void pwm_set_counter (uint slice_num, uint16_t c)
Set PWM counter.
static void pwm_advance_count (uint slice_num)
Advance PWM count.
static void pwm_retard_count (uint slice_num)
Retard PWM count.
static void pwm_set_clkdiv_int_frac (uint slice_num, uint8_t integer, uint8_t fract)
Set PWM clock divider using an 8:4 fractional value.
static void pwm_set_clkdiv (uint slice_num, float divider)
Set PWM clock divider.
static void pwm_set_output_polarity (uint slice_num, bool a, bool b)
Set PWM output polarity.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 251

static void pwm_set_clkdiv_mode (uint slice_num, enum pwm_clkdiv_mode mode)
Set PWM divider mode.
static void pwm_set_phase_correct (uint slice_num, bool phase_correct)
Set PWM phase correct on/off.
static void pwm_set_enabled (uint slice_num, bool enabled)
Enable/Disable PWM.
static void pwm_set_mask_enabled (uint32_t mask)
Enable/Disable multiple PWM slices simultaneously.
static void pwm_set_irq_enabled (uint slice_num, bool enabled)
Enable PWM instance interrupt via the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
static void pwm_set_irq0_enabled (uint slice_num, bool enabled)
Enable PWM instance interrupt via PWM_IRQ_WRAP_0.
static void pwm_irqn_set_slice_enabled (uint irq_index, uint slice_num, bool enabled)
Enable PWM instance interrupt via either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
static void pwm_set_irq_mask_enabled (uint32_t slice_mask, bool enabled)
Enable multiple PWM instance interrupts via the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
static void pwm_set_irq0_mask_enabled (uint32_t slice_mask, bool enabled)
Enable multiple PWM instance interrupts via PWM_IRQ_WRAP_0.
static void pwm_irqn_set_slice_mask_enabled (uint irq_index, uint slice_mask, bool enabled)
Enable PWM instance interrupts via either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
static void pwm_clear_irq (uint slice_num)
Clear a single PWM channel interrupt.
static uint32_t pwm_get_irq_status_mask (void)
Get PWM interrupt status, raw for the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
static uint32_t pwm_get_irq0_status_mask (void)
Get PWM interrupt status, raw for the PWM_IRQ_WRAP_0.
static uint32_t pwm_irqn_get_status_mask (uint irq_index)
Get PWM interrupt status, raw for either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
static void pwm_force_irq (uint slice_num)
Force PWM interrupt for the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
static void pwm_force_irq0 (uint slice_num)
Force PWM interrupt via PWM_IRQ_WRAP_0.
static void pwm_irqn_force (uint irq_index, uint slice_num)
Force PWM interrupt via PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
static uint pwm_get_dreq (uint slice_num)
Return the DREQ to use for pacing transfers to a particular PWM slice.
4.1.18.5. Macro Definition Documentation
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 252

4.1.18.5.1. PWM_DREQ_NUM
#define PWM_DREQ_NUM(slice_num)
Returns the dreq_num_t used for pacing DMA transfers for a given PWM slice.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.18.5.2. PWM_GPIO_SLICE_NUM
#define PWM_GPIO_SLICE_NUM(gpio)
Returns the PWM slice number for a given GPIO number.
4.1.18.5.3. PWM_DEFAULT_IRQ_NUM
#define PWM_DEFAULT_IRQ_NUM()
Returns the irq_num_t for the default PWM IRQ.
On RP2040, there is only one PWM irq: PWM_IRQ_WRAP
On RP2350 this returns to PWM_IRQ_WRAP0
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.18.6. Enumeration Type Documentation
4.1.18.6.1. pwm_clkdiv_mode
enum pwm_clkdiv_mode
PWM Divider mode settings.
Table 27. Enumerator
PWM_DIV_FREE_RUNNING
Free-running counting at rate dictated by fractional divider.
PWM_DIV_B_HIGH
Fractional divider is gated by the PWM B pin.
PWM_DIV_B_RISING
Fractional divider advances with each rising edge of the
PWM B pin.
PWM_DIV_B_FALLING
Fractional divider advances with each falling edge of the
PWM B pin.
4.1.18.7. Function Documentation
4.1.18.7.1. pwm_advance_count
static void pwm_advance_count (uint slice_num) [inline], [static]
Advance PWM count.
Advance the phase of a running the counter by 1 count.
This function will return once the increment is complete.
Parameters
slice_num
PWM slice number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 253

4.1.18.7.2. pwm_clear_irq
static void pwm_clear_irq (uint slice_num) [inline], [static]
Clear a single PWM channel interrupt.
Parameters
slice_num
PWM slice number
4.1.18.7.3. pwm_config_set_clkdiv
static void pwm_config_set_clkdiv (pwm_config * c, float div) [inline], [static]
Set PWM clock divider in a PWM configuration.
Parameters
c
PWM configuration struct to modify
div
Value to divide counting rate by. Must be greater than or equal to 1.
If the divide mode is free-running, the PWM counter runs at clk_sys / div. Otherwise, the divider reduces the rate of
events seen on the B pin input (level or edge) before passing them on to the PWM counter.
4.1.18.7.4. pwm_config_set_clkdiv_int
static void pwm_config_set_clkdiv_int (pwm_config * c, uint div) [inline], [static]
Set PWM clock divider in a PWM configuration.
Parameters
c
PWM configuration struct to modify
div
Integer value to reduce counting rate by. Must be greater than or equal to 1.
If the divide mode is free-running, the PWM counter runs at clk_sys / div. Otherwise, the divider reduces the rate of
events seen on the B pin input (level or edge) before passing them on to the PWM counter.
4.1.18.7.5. pwm_config_set_clkdiv_int_frac
static void pwm_config_set_clkdiv_int_frac (pwm_config * c, uint8_t integer, uint8_t fract) [inline], [static]
Set PWM clock divider in a PWM configuration using an 8:4 fractional value.
Parameters
c
PWM configuration struct to modify
integer
8 bit integer part of the clock divider. Must be greater than or equal to 1.
fract
4 bit fractional part of the clock divider
If the divide mode is free-running, the PWM counter runs at clk_sys / div. Otherwise, the divider reduces the rate of
events seen on the B pin input (level or edge) before passing them on to the PWM counter.
4.1.18.7.6. pwm_config_set_clkdiv_mode
static void pwm_config_set_clkdiv_mode (pwm_config * c, enum pwm_clkdiv_mode mode) [inline], [static]
Set PWM counting mode in a PWM configuration.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 254

c
PWM configuration struct to modify
mode
PWM divide/count mode
Configure which event gates the operation of the fractional divider. The default is always-on (free-running PWM). Can
also be configured to count on high level, rising edge or falling edge of the B pin input.
4.1.18.7.7. pwm_config_set_output_polarity
static void pwm_config_set_output_polarity (pwm_config * c, bool a, bool b) [inline], [static]
Set output polarity in a PWM configuration.
Parameters
c
PWM configuration struct to modify
a
true to invert output A
b
true to invert output B
4.1.18.7.8. pwm_config_set_phase_correct
static void pwm_config_set_phase_correct (pwm_config * c, bool phase_correct) [inline], [static]
Set phase correction in a PWM configuration.
Parameters
c
PWM configuration struct to modify
phase_correct
true to set phase correct modulation, false to set trailing edge
Setting phase control to true means that instead of wrapping back to zero when the wrap point is reached, the PWM
starts counting back down. The output frequency is halved when phase-correct mode is enabled.
4.1.18.7.9. pwm_config_set_wrap
static void pwm_config_set_wrap (pwm_config * c, uint16_t wrap) [inline], [static]
Set PWM counter wrap value in a PWM configuration.
Set the highest value the counter will reach before returning to 0. Also known as TOP.
Parameters
c
PWM configuration struct to modify
wrap
Value to set wrap to
4.1.18.7.10. pwm_force_irq
static void pwm_force_irq (uint slice_num) [inline], [static]
Force PWM interrupt for the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
Parameters
slice_num
PWM slice number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 255

4.1.18.7.11. pwm_force_irq0
static void pwm_force_irq0 (uint slice_num) [inline], [static]
Force PWM interrupt via PWM_IRQ_WRAP_0.
Parameters
slice_num
PWM slice number
4.1.18.7.12. pwm_get_counter
static uint16_t pwm_get_counter (uint slice_num) [inline], [static]
Get PWM counter.
Get current value of PWM counter
Parameters
slice_num
PWM slice number
Returns
Current value of the PWM counter
4.1.18.7.13. pwm_get_default_config
static pwm_config pwm_get_default_config (void) [inline], [static]
Get a set of default values for PWM configuration.
PWM config is free-running at system clock speed, no phase correction, wrapping at 0xffff, with standard polarities for
channels A and B.
Returns
Set of default values.
4.1.18.7.14. pwm_get_dreq
static uint pwm_get_dreq (uint slice_num) [inline], [static]
Return the DREQ to use for pacing transfers to a particular PWM slice.
Parameters
slice_num
PWM slice number
4.1.18.7.15. pwm_get_irq0_status_mask
static uint32_t pwm_get_irq0_status_mask (void) [inline], [static]
Get PWM interrupt status, raw for the PWM_IRQ_WRAP_0.
Returns
Bitmask of all PWM interrupts currently set
4.1.18.7.16. pwm_get_irq_status_mask
static uint32_t pwm_get_irq_status_mask (void) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 256

Get PWM interrupt status, raw for the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
Returns
Bitmask of all PWM interrupts currently set
4.1.18.7.17. pwm_gpio_to_channel
static uint pwm_gpio_to_channel (uint gpio) [inline], [static]
Determine the PWM channel that is attached to the specified GPIO.
Each slice 0 to 7 has two channels, A and B.
Returns
The PWM channel that controls the specified GPIO.
4.1.18.7.18. pwm_gpio_to_slice_num
static uint pwm_gpio_to_slice_num (uint gpio) [inline], [static]
Determine the PWM slice that is attached to the specified GPIO.
Returns
The PWM slice number that controls the specified GPIO.
4.1.18.7.19. pwm_init
static void pwm_init (uint slice_num, pwm_config * c, bool start) [inline], [static]
Initialise a PWM with settings from a configuration object.
Use the pwm_get_default_config() function to initialise a config structure, make changes as needed using the
pwm_config_* functions, then call this function to set up the PWM.
Parameters
slice_num
PWM slice number
c
The configuration to use
start
If true the PWM will be started running once configured. If false you will need to start manually
using pwm_set_enabled() or pwm_set_mask_enabled()
4.1.18.7.20. pwm_irqn_force
static void pwm_irqn_force (uint irq_index, uint slice_num) [inline], [static]
Force PWM interrupt via PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
Parameters
irq_index
the IRQ index; either 0 or 1 for PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1
slice_num
PWM slice number
4.1.18.7.21. pwm_irqn_get_status_mask
static uint32_t pwm_irqn_get_status_mask (uint irq_index) [inline], [static]
Get PWM interrupt status, raw for either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 257

Parameters
irq_index
the IRQ index; either 0 or 1 for PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1
Returns
Bitmask of all PWM interrupts currently set
4.1.18.7.22. pwm_irqn_set_slice_enabled
static void pwm_irqn_set_slice_enabled (uint irq_index, uint slice_num, bool enabled) [inline], [static]
Enable PWM instance interrupt via either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
Used to enable a single PWM instance interrupt.
Note there is only one PWM_IRQ_WRAP on RP2040.
Parameters
irq_index
the IRQ index; either 0 or 1 for PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1
slice_num
PWM block to enable/disable
enabled
true to enable, false to disable
4.1.18.7.23. pwm_irqn_set_slice_mask_enabled
static void pwm_irqn_set_slice_mask_enabled (uint irq_index, uint slice_mask, bool enabled) [inline], [static]
Enable PWM instance interrupts via either PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1.
Used to enable a single PWM instance interrupt.
Note there is only one PWM_IRQ_WRAP on RP2040.
Parameters
irq_index
the IRQ index; either 0 or 1 for PWM_IRQ_WRAP_0 or PWM_IRQ_WRAP_1
slice_mask
Bitmask of all the blocks to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable, false to disable
4.1.18.7.24. pwm_retard_count
static void pwm_retard_count (uint slice_num) [inline], [static]
Retard PWM count.
Retard the phase of a running counter by 1 count
This function will return once the retardation is complete.
Parameters
slice_num
PWM slice number
4.1.18.7.25. pwm_set_both_levels
static void pwm_set_both_levels (uint slice_num, uint16_t level_a, uint16_t level_b) [inline], [static]
Set PWM counter compare values.
Set the value of the PWM counter compare values, A and B.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 258

The counter compare register is double-buffered in hardware. This means that, when the PWM is running, a write to the
counter compare values does not take effect until the next time the PWM slice wraps (or, in phase-correct mode, the
next time the slice reaches 0). If the PWM is not running, the write is latched in immediately.
Parameters
slice_num
PWM slice number
level_a
Value to set compare A to. When the counter reaches this value the A output is deasserted
level_b
Value to set compare B to. When the counter reaches this value the B output is deasserted
4.1.18.7.26. pwm_set_chan_level
static void pwm_set_chan_level (uint slice_num, uint chan, uint16_t level) [inline], [static]
Set the current PWM counter compare value for one channel.
Set the value of the PWM counter compare value, for either channel A or channel B.
The counter compare register is double-buffered in hardware. This means that, when the PWM is running, a write to the
counter compare values does not take effect until the next time the PWM slice wraps (or, in phase-correct mode, the
next time the slice reaches 0). If the PWM is not running, the write is latched in immediately.
Parameters
slice_num
PWM slice number
chan
Which channel to update. 0 for A, 1 for B.
level
new level for the selected output
4.1.18.7.27. pwm_set_clkdiv
static void pwm_set_clkdiv (uint slice_num, float divider) [inline], [static]
Set PWM clock divider.
Set the clock divider. Counter increment will be on sysclock divided by this value, taking into account the gating.
Parameters
slice_num
PWM slice number
divider
Floating point clock divider, 1.f ⇐ value < 256.f
4.1.18.7.28. pwm_set_clkdiv_int_frac
static void pwm_set_clkdiv_int_frac (uint slice_num, uint8_t integer, uint8_t fract) [inline], [static]
Set PWM clock divider using an 8:4 fractional value.
Set the clock divider. Counter increment will be on sysclock divided by this value, taking into account the gating.
Parameters
slice_num
PWM slice number
integer
8 bit integer part of the clock divider
fract
4 bit fractional part of the clock divider
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 259

4.1.18.7.29. pwm_set_clkdiv_mode
static void pwm_set_clkdiv_mode (uint slice_num, enum pwm_clkdiv_mode mode) [inline], [static]
Set PWM divider mode.
Parameters
slice_num
PWM slice number
mode
Required divider mode
4.1.18.7.30. pwm_set_counter
static void pwm_set_counter (uint slice_num, uint16_t c) [inline], [static]
Set PWM counter.
Set the value of the PWM counter
Parameters
slice_num
PWM slice number
c
Value to set the PWM counter to
4.1.18.7.31. pwm_set_enabled
static void pwm_set_enabled (uint slice_num, bool enabled) [inline], [static]
Enable/Disable PWM.
When a PWM is disabled, it halts its counter, and the output pins are left high or low depending on exactly when the
counter is halted. When re-enabled the PWM resumes immediately from where it left off.
If the PWM’s output pins need to be low when halted:
•
The counter compare can be set to zero whilst the PWM is enabled, and then the PWM disabled once both pins are
seen to be low
•
The GPIO output overrides can be used to force the actual pins low
•
The PWM can be run for one cycle (i.e. enabled then immediately disabled) with a TOP of 0, count of 0 and counter
compare of 0, to force the pins low when the PWM has already been halted. The same method can be used with a
counter compare value of 1 to force a pin high.
Note that, when disabled, the PWM can still be advanced one count at a time by pulsing the PH_ADV bit in its CSR. The
output pins transition as though the PWM were enabled.
Parameters
slice_num
PWM slice number
enabled
true to enable the specified PWM, false to disable.
4.1.18.7.32. pwm_set_gpio_level
static void pwm_set_gpio_level (uint gpio, uint16_t level) [inline], [static]
Helper function to set the PWM level for the slice and channel associated with a GPIO.
Look up the correct slice (0 to 7) and channel (A or B) for a given GPIO, and update the corresponding counter compare
field.
This PWM slice should already have been configured and set running. Also be careful of multiple GPIOs mapping to the
same slice and channel (if GPIOs have a difference of 16).
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 260

The counter compare register is double-buffered in hardware. This means that, when the PWM is running, a write to the
counter compare values does not take effect until the next time the PWM slice wraps (or, in phase-correct mode, the
next time the slice reaches 0). If the PWM is not running, the write is latched in immediately.
Parameters
gpio
GPIO to set level of
level
PWM level for this GPIO
4.1.18.7.33. pwm_set_irq0_enabled
static void pwm_set_irq0_enabled (uint slice_num, bool enabled) [inline], [static]
Enable PWM instance interrupt via PWM_IRQ_WRAP_0.
Used to enable a single PWM instance interrupt.
Parameters
slice_num
PWM block to enable/disable
enabled
true to enable, false to disable
4.1.18.7.34. pwm_set_irq0_mask_enabled
static void pwm_set_irq0_mask_enabled (uint32_t slice_mask, bool enabled) [inline], [static]
Enable multiple PWM instance interrupts via PWM_IRQ_WRAP_0.
Use this to enable multiple PWM interrupts at once.
Parameters
slice_mask
Bitmask of all the blocks to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable, false to disable
4.1.18.7.35. pwm_set_irq_enabled
static void pwm_set_irq_enabled (uint slice_num, bool enabled) [inline], [static]
Enable PWM instance interrupt via the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
Used to enable a single PWM instance interrupt.
Note there is only one PWM_IRQ_WRAP on RP2040.
Parameters
slice_num
PWM block to enable/disable
enabled
true to enable, false to disable
4.1.18.7.36. pwm_set_irq_mask_enabled
static void pwm_set_irq_mask_enabled (uint32_t slice_mask, bool enabled) [inline], [static]
Enable multiple PWM instance interrupts via the default PWM IRQ (PWM_IRQ_WRAP_0 on RP2350)
Use this to enable multiple PWM interrupts at once.
Note there is only one PWM_IRQ_WRAP on RP2040.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 261

slice_mask
Bitmask of all the blocks to enable/disable. Channel 0 = bit 0, channel 1 = bit 1 etc.
enabled
true to enable, false to disable
4.1.18.7.37. pwm_set_mask_enabled
static void pwm_set_mask_enabled (uint32_t mask) [inline], [static]
Enable/Disable multiple PWM slices simultaneously.
Parameters
mask
Bitmap of PWMs to enable/disable. Bits 0 to 7 enable slices 0-7 respectively
4.1.18.7.38. pwm_set_output_polarity
static void pwm_set_output_polarity (uint slice_num, bool a, bool b) [inline], [static]
Set PWM output polarity.
Parameters
slice_num
PWM slice number
a
true to invert output A
b
true to invert output B
4.1.18.7.39. pwm_set_phase_correct
static void pwm_set_phase_correct (uint slice_num, bool phase_correct) [inline], [static]
Set PWM phase correct on/off.
Parameters
slice_num
PWM slice number
phase_correct
true to set phase correct modulation, false to set trailing edge
Setting phase control to true means that instead of wrapping back to zero when the wrap point is reached, the PWM
starts counting back down. The output frequency is halved when phase-correct mode is enabled.
4.1.18.7.40. pwm_set_wrap
static void pwm_set_wrap (uint slice_num, uint16_t wrap) [inline], [static]
Set the current PWM counter wrap value.
Set the highest value the counter will reach before returning to 0. Also known as TOP.
The counter wrap value is double-buffered in hardware. This means that, when the PWM is running, a write to the
counter wrap value does not take effect until after the next time the PWM slice wraps (or, in phase-correct mode, the
next time the slice reaches 0). If the PWM is not running, the write is latched in immediately.
Parameters
slice_num
PWM slice number
wrap
Value to set wrap to
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 262

4.1.19. hardware_resets
Hardware Reset API.
4.1.19.1. Detailed Description
The reset controller allows software control of the resets to all of the peripherals that are not critical to boot the
processor in the RP-series microcontroller.
4.1.19.1.1. reset_bitmask
Multiple blocks are referred to using a bitmask as follows:
Block to reset Bit
USB 24
UART 1 23
UART 0 22
Timer 21
TB Manager 20
SysInfo 19
System Config 18
SPI 1 17
SPI 0 16
RTC 15
PWM 14
PLL USB 13
PLL System 12
PIO 1 11
PIO 0 10
Pads - QSPI 9
Pads - bank 0 8
JTAG 7
IO Bank 1 6
IO Bank 0 5
I2C 1 4
I2C 0 3
DMA 2
Bus Control 1
ADC 0 0
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 263

4.1.19.1.2. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/resets.h"
Ê4
Ê5 int main() {
Ê6 stdio_init_all();
Ê7
Ê8 printf("Hello, reset!\n");
Ê9
10 // Put the PWM block into reset
11 reset_block_num(RESET_PWM);
12
13 // And bring it out
14 unreset_block_num_wait_blocking(RESET_PWM);
15
16 // Put the PWM and ADC block into reset
17 reset_block_mask((1u << RESET_PWM) | (1u << RESET_ADC));
18
19 // Wait for both to come out of reset
20 unreset_block_mask_wait_blocking((1u << RESET_PWM) | (1u << RESET_ADC));
21
22 return 0;
23 }
4.1.19.2. Typedefs
typedef enum reset_num_rp2040 reset_num_t
Resettable component numbers on RP2040 (used as typedef reset_num_t)
typedef enum reset_num_rp2350 reset_num_t
Resettable component numbers on RP2350 (used as typedef reset_num_t)
4.1.19.3. Enumerations
enum reset_num_rp2040 { RESET_ADC = 0, RESET_BUSCTRL = 1, RESET_DMA = 2, RESET_I2C0 = 3, RESET_I2C1 = 4, RESET_IO_BANK0 =
5, RESET_IO_QSPI = 6, RESET_JTAG = 7, RESET_PADS_BANK0 = 8, RESET_PADS_QSPI = 9, RESET_PIO0 = 10, RESET_PIO1 = 11,
RESET_PLL_SYS = 12, RESET_PLL_USB = 13, RESET_PWM = 14, RESET_RTC = 15, RESET_SPI0 = 16, RESET_SPI1 = 17, RESET_SYSCFG =
18, RESET_SYSINFO = 19, RESET_TBMAN = 20, RESET_TIMER = 21, RESET_UART0 = 22, RESET_UART1 = 23, RESET_USBCTRL = 24,
RESET_COUNT }
Resettable component numbers on RP2040 (used as typedef reset_num_t)
enum reset_num_rp2350 { RESET_ADC = 0, RESET_BUSCTRL = 1, RESET_DMA = 2, RESET_HSTX = 3, RESET_I2C0 = 4, RESET_I2C1 = 5,
RESET_IO_BANK0 = 6, RESET_IO_QSPI = 7, RESET_JTAG = 8, RESET_PADS_BANK0 = 9, RESET_PADS_QSPI = 10, RESET_PIO0 = 11,
RESET_PIO1 = 12, RESET_PIO2 = 13, RESET_PLL_SYS = 14, RESET_PLL_USB = 15, RESET_PWM = 16, RESET_SHA256 = 17, RESET_SPI0 =
18, RESET_SPI1 = 19, RESET_SYSCFG = 20, RESET_SYSINFO = 21, RESET_TBMAN = 22, RESET_TIMER0 = 23, RESET_TIMER1 = 24,
RESET_TRNG = 25, RESET_UART0 = 26, RESET_UART1 = 27, RESET_USBCTRL = 28, RESET_COUNT }
Resettable component numbers on RP2350 (used as typedef reset_num_t)
4.1.19.4. Functions
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 264

static __force_inline void reset_block_mask (uint32_t bits)
Reset the specified HW blocks.
static __force_inline void unreset_block_mask (uint32_t bits)
bring specified HW blocks out of reset
static __force_inline void unreset_block_mask_wait_blocking (uint32_t bits)
Bring specified HW blocks out of reset and wait for completion.
static void reset_block_num (uint32_t block_num)
Reset the specified HW block.
static void unreset_block_num (uint block_num)
bring specified HW block out of reset
static void unreset_block_num_wait_blocking (uint block_num)
Bring specified HW block out of reset and wait for completion.
static void reset_unreset_block_num_wait_blocking (uint block_num)
Reset the specified HW block, and then bring at back out of reset and wait for completion.
4.1.19.5. Typedef Documentation
4.1.19.5.1. reset_num_t
typedef enum reset_num_rp2040 reset_num_t
Resettable component numbers on RP2040 (used as typedef reset_num_t)
4.1.19.5.2. reset_num_t
typedef enum reset_num_rp2350 reset_num_t
Resettable component numbers on RP2350 (used as typedef reset_num_t)
4.1.19.6. Enumeration Type Documentation
4.1.19.6.1. reset_num_rp2040
enum reset_num_rp2040
Resettable component numbers on RP2040 (used as typedef reset_num_t)
Table 28. Enumerator
RESET_ADC
Select ADC to be reset.
RESET_BUSCTRL
Select BUSCTRL to be reset.
RESET_DMA
Select DMA to be reset.
RESET_I2C0
Select I2C0 to be reset.
RESET_I2C1
Select I2C1 to be reset.
RESET_IO_BANK0
Select IO_BANK0 to be reset.
RESET_IO_QSPI
Select IO_QSPI to be reset.
RESET_JTAG
Select JTAG to be reset.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 265

RESET_PADS_BANK0
Select PADS_BANK0 to be reset.
RESET_PADS_QSPI
Select PADS_QSPI to be reset.
RESET_PIO0
Select PIO0 to be reset.
RESET_PIO1
Select PIO1 to be reset.
RESET_PLL_SYS
Select PLL_SYS to be reset.
RESET_PLL_USB
Select PLL_USB to be reset.
RESET_PWM
Select PWM to be reset.
RESET_RTC
Select RTC to be reset.
RESET_SPI0
Select SPI0 to be reset.
RESET_SPI1
Select SPI1 to be reset.
RESET_SYSCFG
Select SYSCFG to be reset.
RESET_SYSINFO
Select SYSINFO to be reset.
RESET_TBMAN
Select TBMAN to be reset.
RESET_TIMER
Select TIMER to be reset.
RESET_UART0
Select UART0 to be reset.
RESET_UART1
Select UART1 to be reset.
RESET_USBCTRL
Select USBCTRL to be reset.
4.1.19.6.2. reset_num_rp2350
enum reset_num_rp2350
Resettable component numbers on RP2350 (used as typedef reset_num_t)
Table 29. Enumerator
RESET_ADC
Select ADC to be reset.
RESET_BUSCTRL
Select BUSCTRL to be reset.
RESET_DMA
Select DMA to be reset.
RESET_HSTX
Select HSTX to be reset.
RESET_I2C0
Select I2C0 to be reset.
RESET_I2C1
Select I2C1 to be reset.
RESET_IO_BANK0
Select IO_BANK0 to be reset.
RESET_IO_QSPI
Select IO_QSPI to be reset.
RESET_JTAG
Select JTAG to be reset.
RESET_PADS_BANK0
Select PADS_BANK0 to be reset.
RESET_PADS_QSPI
Select PADS_QSPI to be reset.
RESET_PIO0
Select PIO0 to be reset.
RESET_PIO1
Select PIO1 to be reset.
RESET_PIO2
Select PIO2 to be reset.
RESET_PLL_SYS
Select PLL_SYS to be reset.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 266

RESET_PLL_USB
Select PLL_USB to be reset.
RESET_PWM
Select PWM to be reset.
RESET_SHA256
Select SHA256 to be reset.
RESET_SPI0
Select SPI0 to be reset.
RESET_SPI1
Select SPI1 to be reset.
RESET_SYSCFG
Select SYSCFG to be reset.
RESET_SYSINFO
Select SYSINFO to be reset.
RESET_TBMAN
Select TBMAN to be reset.
RESET_TIMER0
Select TIMER0 to be reset.
RESET_TIMER1
Select TIMER1 to be reset.
RESET_TRNG
Select TRNG to be reset.
RESET_UART0
Select UART0 to be reset.
RESET_UART1
Select UART1 to be reset.
RESET_USBCTRL
Select USBCTRL to be reset.
4.1.19.7. Function Documentation
4.1.19.7.1. reset_block_mask
static __force_inline void reset_block_mask (uint32_t bits) [static]
Reset the specified HW blocks.
Parameters
bits
Bit pattern indicating blocks to reset. See reset_bitmask
4.1.19.7.2. reset_block_num
static void reset_block_num (uint32_t block_num) [inline], [static]
Reset the specified HW block.
Parameters
block_num
the block number
4.1.19.7.3. reset_unreset_block_num_wait_blocking
static void reset_unreset_block_num_wait_blocking (uint block_num) [inline], [static]
Reset the specified HW block, and then bring at back out of reset and wait for completion.
Parameters
block_num
the block number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 267

4.1.19.7.4. unreset_block_mask
static __force_inline void unreset_block_mask (uint32_t bits) [static]
bring specified HW blocks out of reset
Parameters
bits
Bit pattern indicating blocks to unreset. See reset_bitmask
4.1.19.7.5. unreset_block_mask_wait_blocking
static __force_inline void unreset_block_mask_wait_blocking (uint32_t bits) [static]
Bring specified HW blocks out of reset and wait for completion.
Parameters
bits
Bit pattern indicating blocks to unreset. See reset_bitmask
4.1.19.7.6. unreset_block_num
static void unreset_block_num (uint block_num) [inline], [static]
bring specified HW block out of reset
Parameters
block_num
the block number
4.1.19.7.7. unreset_block_num_wait_blocking
static void unreset_block_num_wait_blocking (uint block_num) [inline], [static]
Bring specified HW block out of reset and wait for completion.
Parameters
block_num
the block number
4.1.20. hardware_riscv
Accessors for standard RISC-V hardware (mainly CSRs)
4.1.21. hardware_riscv_platform_timer
Accessors for standard RISC-V platform timer (mtime/mtimecmp), available on Raspberry Pi microcontrollers with
RISC-V processors.
4.1.21.1. Detailed Description
Note this header can be used by Arm as well as RISC-V processors, as the timer is a memory-mapped peripheral
external to the processors. The name refers to this timer being a standard RISC-V peripheral.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 268

4.1.21.2. Functions
static void riscv_timer_set_enabled (bool enabled)
Enable or disable the RISC-V platform timer.
static void riscv_timer_set_fullspeed (bool fullspeed)
Configure the RISC-V platform timer to run at full system clock speed.
static uint64_t riscv_timer_get_mtime (void)
Read the RISC-V platform timer.
static void riscv_timer_set_mtime (uint64_t mtime)
Update the RISC-V platform timer.
static uint64_t riscv_timer_get_mtimecmp (void)
Get the current RISC-V platform timer mtimecmp value for this core.
static void riscv_timer_set_mtimecmp (uint64_t mtimecmp)
Set a new RISC-V platform timer interrupt comparison value (mtimecmp) for this core.
4.1.21.3. Function Documentation
4.1.21.3.1. riscv_timer_get_mtime
static uint64_t riscv_timer_get_mtime (void) [inline], [static]
Read the RISC-V platform timer.
Returns
Current 64-bit mtime value
4.1.21.3.2. riscv_timer_get_mtimecmp
static uint64_t riscv_timer_get_mtimecmp (void) [inline], [static]
Get the current RISC-V platform timer mtimecmp value for this core.
Get the current mtimecmp value for the calling core. This function is interrupt-safe as long as timer interrupts only
increase the value of mtimecmp. Otherwise, it must be called with timer interrupts disabled.
Returns
Current value of mtimecmp
4.1.21.3.3. riscv_timer_set_enabled
static void riscv_timer_set_enabled (bool enabled) [inline], [static]
Enable or disable the RISC-V platform timer.
This enables and disables the counting of the RISC-V platform timer. It does not enable or disable the interrupts, which
are asserted unconditionally when a given core’s mtimecmp/mtimecmph registers are greater than the current 64-bit
value of the mtime/mtimeh registers.
Parameters
enabled
Pass true to enable, false to disable
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 269

4.1.21.3.4. riscv_timer_set_fullspeed
static void riscv_timer_set_fullspeed (bool fullspeed) [inline], [static]
Configure the RISC-V platform timer to run at full system clock speed.
Parameters
fullspeed
Pass true to increment at system clock speed, false to increment at the frequency defined by the
system tick generator (the ticks block)
4.1.21.3.5. riscv_timer_set_mtime
static void riscv_timer_set_mtime (uint64_t mtime) [inline], [static]
Update the RISC-V platform timer.
This function should only be called when the timer is disabled via riscv_timer_set_enabled(). Note also that unlike the
mtimecmp comparison values, mtime is not core-local, so updates on one core will be visible to the other core.
Parameters
mtime
New value to set the RISC-V platform timer to
4.1.21.3.6. riscv_timer_set_mtimecmp
static void riscv_timer_set_mtimecmp (uint64_t mtimecmp) [inline], [static]
Set a new RISC-V platform timer interrupt comparison value (mtimecmp) for this core.
This function updates the mtimecmp value for the current core. The calling core’s RISC-V platform timer interrupt is
asserted whenever the 64-bit mtime value (stored in 32-bit mtime/mtimeh registers) is greater than or equal to this
core’s current mtime/mtimecmph value.
Parameters
mtime
New value to set the RISC-V platform timer to
4.1.22. hardware_rtc
Hardware Real Time Clock API.
4.1.22.1. Detailed Description
The RTC keeps track of time in human readable format and generates events when the time is equal to a preset value.
Think of a digital clock, not epoch time used by most computers. There are seven fields, one each for year (12 bit),
month (4 bit), day (5 bit), day of the week (3 bit), hour (5 bit) minute (6 bit) and second (6 bit), storing the data in binary
format.
See also
datetime_t
4.1.22.1.1. Example
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 270

Ê1 #include <stdio.h>
Ê2 #include "hardware/rtc.h"
Ê3 #include "pico/stdlib.h"
Ê4 #include "pico/util/datetime.h"
Ê5
Ê6 int main() {
Ê7 stdio_init_all();
Ê8 printf("Hello RTC!\n");
Ê9
10 char datetime_buf[256];
11 char *datetime_str = &datetime_buf[0];
12
13 // Start on Friday 5th of June 2020 15:45:00
14 datetime_t t = {
15 .year = 2020,
16 .month = 06,
17 .day = 05,
18 .dotw = 5, // 0 is Sunday, so 5 is Friday
19 .hour = 15,
20 .min = 45,
21 .sec = 00
22 };
23
24 // Start the RTC
25 rtc_init();
26 rtc_set_datetime(&t);
27
28 // clk_sys is >2000x faster than clk_rtc, so datetime is not updated immediately when
Ê rtc_get_datetime() is called.
29 // The delay is up to 3 RTC clock cycles (which is 64us with the default clock settings)
30 sleep_us(64);
31
32 // Print the time
33 while (true) {
34 rtc_get_datetime(&t);
35 datetime_to_str(datetime_str, sizeof(datetime_buf), &t);
36 printf("\r%s ", datetime_str);
37 sleep_ms(100);
38 }
39 }
4.1.22.2. Typedefs
typedef void(* rtc_callback_t)(void)
4.1.22.3. Functions
void rtc_init (void)
Initialise the RTC system.
bool rtc_set_datetime (const datetime_t *t)
Set the RTC to the specified time.
bool rtc_get_datetime (datetime_t *t)
Get the current time from the RTC.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 271

bool rtc_running (void)
Is the RTC running?
void rtc_set_alarm (const datetime_t *t, rtc_callback_t user_callback)
Set a time in the future for the RTC to call a user provided callback.
void rtc_enable_alarm (void)
Enable the RTC alarm (if inactive)
void rtc_disable_alarm (void)
Disable the RTC alarm (if active)
4.1.22.4. Typedef Documentation
4.1.22.4.1. rtc_callback_t
typedef void(* rtc_callback_t) (void)
Callback function type for RTC alarms
See also
rtc_set_alarm()
4.1.22.5. Function Documentation
4.1.22.5.1. rtc_disable_alarm
void rtc_disable_alarm (void)
Disable the RTC alarm (if active)
4.1.22.5.2. rtc_enable_alarm
void rtc_enable_alarm (void)
Enable the RTC alarm (if inactive)
4.1.22.5.3. rtc_get_datetime
bool rtc_get_datetime (datetime_t * t)
Get the current time from the RTC.
Parameters
t
Pointer to a datetime_t structure to receive the current RTC time
Returns
true if datetime is valid, false if the RTC is not running.
4.1.22.5.4. rtc_init
void rtc_init (void)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 272
Initialise the RTC system.
4.1.22.5.5. rtc_running
bool rtc_running (void)
Is the RTC running?
4.1.22.5.6. rtc_set_alarm
void rtc_set_alarm (const datetime_t * t, rtc_callback_t user_callback)
Set a time in the future for the RTC to call a user provided callback.
Parameters
t
Pointer to a datetime_t structure containing a time in the future to fire the alarm. Any values set
to -1 will not be matched on.
user_callback
pointer to a rtc_callback_t to call when the alarm fires
4.1.22.5.7. rtc_set_datetime
bool rtc_set_datetime (const datetime_t * t)
Set the RTC to the specified time.
NOTE
Note that after setting the RTC date and time, a subsequent read of the values (e.g. via rtc_get_datetime()) may not
reflect the new setting until up to three cycles of the potentially-much-slower RTC clock domain have passed. This
represents a period of 64 microseconds with the default RTC clock configuration.
Parameters
t
Pointer to a datetime_t structure contains time to set
Returns
true if set, false if the passed in datetime was invalid.
4.1.23. hardware_rcp
Inline functions and assembly macros for the Redundancy Coprocessor.
4.1.24. hardware_spi
Hardware SPI API.
4.1.24.1. Detailed Description
RP-series microcontrollers have 2 identical instances of the Serial Peripheral Interface (SPI) controller.
The PrimeCell SSP is a master or slave interface for synchronous serial communication with peripheral devices that
have Motorola SPI, National Semiconductor Microwire, or Texas Instruments synchronous serial interfaces.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 273

Controller can be defined as master or slave using the spi_set_slave function.
Each controller can be connected to a number of GPIO pins, see the datasheet GPIO function selection table for more
information.
4.1.24.2. Macros
•
#define spi0 ((spi_inst_t *)spi0_hw)
•
#define spi1 ((spi_inst_t *)spi1_hw)
•
#define SPI_NUM(spi)
•
#define SPI_INSTANCE(num)
•
#define SPI_DREQ_NUM(spi, is_tx)
4.1.24.3. Enumerations
enum spi_cpha_t { SPI_CPHA_0 = 0, SPI_CPHA_1 = 1 }
Enumeration of SPI CPHA (clock phase) values.
enum spi_cpol_t { SPI_CPOL_0 = 0, SPI_CPOL_1 = 1 }
Enumeration of SPI CPOL (clock polarity) values.
enum spi_order_t { SPI_LSB_FIRST = 0, SPI_MSB_FIRST = 1 }
Enumeration of SPI bit-order values.
4.1.24.4. Functions
uint spi_init (spi_inst_t *spi, uint baudrate)
Initialise SPI instances.
void spi_deinit (spi_inst_t *spi)
Deinitialise SPI instances.
uint spi_set_baudrate (spi_inst_t *spi, uint baudrate)
Set SPI baudrate.
uint spi_get_baudrate (const spi_inst_t *spi)
Get SPI baudrate.
static uint spi_get_index (const spi_inst_t *spi)
Convert SPI instance to hardware instance number.
static void spi_set_format (spi_inst_t *spi, uint data_bits, spi_cpol_t cpol, spi_cpha_t cpha, __unused spi_order_t
order)
Configure SPI.
static void spi_set_slave (spi_inst_t *spi, bool slave)
Set SPI master/slave.
static bool spi_is_writable (const spi_inst_t *spi)
Check whether a write can be done on SPI device.
static bool spi_is_readable (const spi_inst_t *spi)
Check whether a read can be done on SPI device.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 274

static bool spi_is_busy (const spi_inst_t *spi)
Check whether SPI is busy.
int spi_write_read_blocking (spi_inst_t *spi, const uint8_t *src, uint8_t *dst, size_t len)
Write/Read to/from an SPI device.
int spi_write_blocking (spi_inst_t *spi, const uint8_t *src, size_t len)
Write to an SPI device, blocking.
int spi_read_blocking (spi_inst_t *spi, uint8_t repeated_tx_data, uint8_t *dst, size_t len)
Read from an SPI device.
int spi_write16_read16_blocking (spi_inst_t *spi, const uint16_t *src, uint16_t *dst, size_t len)
Write/Read half words to/from an SPI device.
int spi_write16_blocking (spi_inst_t *spi, const uint16_t *src, size_t len)
Write to an SPI device.
int spi_read16_blocking (spi_inst_t *spi, uint16_t repeated_tx_data, uint16_t *dst, size_t len)
Read from an SPI device.
static uint spi_get_dreq (spi_inst_t *spi, bool is_tx)
Return the DREQ to use for pacing transfers to/from a particular SPI instance.
4.1.24.5. Macro Definition Documentation
4.1.24.5.1. spi0
#define spi0 ((spi_inst_t *)spi0_hw)
Identifier for the first (SPI 0) hardware SPI instance (for use in SPI functions).
e.g. spi_init(spi0, 48000)
4.1.24.5.2. spi1
#define spi1 ((spi_inst_t *)spi1_hw)
Identifier for the second (SPI 1) hardware SPI instance (for use in SPI functions).
e.g. spi_init(spi1, 48000)
4.1.24.5.3. SPI_NUM
#define SPI_NUM(spi)
Returns the SPI number for a SPI instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.24.5.4. SPI_INSTANCE
#define SPI_INSTANCE(num)
Returns the SPI instance with the given SPI number.
Note this macro is intended to resolve at compile time, and does no parameter checking
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 275

4.1.24.5.5. SPI_DREQ_NUM
#define SPI_DREQ_NUM(spi, is_tx)
Returns the dreq_num_t used for pacing DMA transfers to or from this SPI instance. If is_tx is true, then it is for transfers
to the SPI else for transfers from the SPI.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.24.6. Enumeration Type Documentation
4.1.24.6.1. spi_cpha_t
enum spi_cpha_t
Enumeration of SPI CPHA (clock phase) values.
4.1.24.6.2. spi_cpol_t
enum spi_cpol_t
Enumeration of SPI CPOL (clock polarity) values.
4.1.24.6.3. spi_order_t
enum spi_order_t
Enumeration of SPI bit-order values.
4.1.24.7. Function Documentation
4.1.24.7.1. spi_deinit
void spi_deinit (spi_inst_t * spi)
Deinitialise SPI instances.
Puts the SPI into a disabled state. Init will need to be called to re-enable the device functions.
Parameters
spi
SPI instance specifier, either spi0 or spi1
4.1.24.7.2. spi_get_baudrate
uint spi_get_baudrate (const spi_inst_t * spi)
Get SPI baudrate.
Get SPI baudrate which was set by
See also
spi_set_baudrate
Parameters
spi
SPI instance specifier, either spi0 or spi1
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 276

Returns
The actual baudrate set
4.1.24.7.3. spi_get_dreq
static uint spi_get_dreq (spi_inst_t * spi, bool is_tx) [inline], [static]
Return the DREQ to use for pacing transfers to/from a particular SPI instance.
Parameters
spi
SPI instance specifier, either spi0 or spi1
is_tx
true for sending data to the SPI instance, false for receiving data from the SPI instance
4.1.24.7.4. spi_get_index
static uint spi_get_index (const spi_inst_t * spi) [inline], [static]
Convert SPI instance to hardware instance number.
Parameters
spi
SPI instance
Returns
Number of SPI, 0 or 1.
4.1.24.7.5. spi_init
uint spi_init (spi_inst_t * spi, uint baudrate)
Initialise SPI instances.
Puts the SPI into a known state, and enable it. Must be called before other functions.
NOTE
There is no guarantee that the baudrate requested can be achieved exactly; the nearest will be chosen and returned
Parameters
spi
SPI instance specifier, either spi0 or spi1
baudrate
Baudrate requested in Hz
Returns
the actual baud rate set
4.1.24.7.6. spi_is_busy
static bool spi_is_busy (const spi_inst_t * spi) [inline], [static]
Check whether SPI is busy.
Parameters
spi
SPI instance specifier, either spi0 or spi1
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 277

true if SPI is busy
4.1.24.7.7. spi_is_readable
static bool spi_is_readable (const spi_inst_t * spi) [inline], [static]
Check whether a read can be done on SPI device.
Parameters
spi
SPI instance specifier, either spi0 or spi1
Returns
true if a read is possible i.e. data is present
4.1.24.7.8. spi_is_writable
static bool spi_is_writable (const spi_inst_t * spi) [inline], [static]
Check whether a write can be done on SPI device.
Parameters
spi
SPI instance specifier, either spi0 or spi1
Returns
false if no space is available to write. True if a write is possible
4.1.24.7.9. spi_read16_blocking
int spi_read16_blocking (spi_inst_t * spi, uint16_t repeated_tx_data, uint16_t * dst, size_t len)
Read from an SPI device.
Read len halfwords from SPI to dst. Blocks until all data is transferred. No timeout, as SPI hardware always transfers at
a known data rate. repeated_tx_data is output repeatedly on TX as data is read in from RX. Generally this can be 0, but
some devices require a specific value here, e.g. SD cards expect 0xff
NOTE
SPI should be initialised with 16 data_bits using spi_set_format first, otherwise this function will only read 8
data_bits.
Parameters
spi
SPI instance specifier, either spi0 or spi1
repeated_tx_data
Buffer of data to write
dst
Buffer for read data
len
Length of buffer dst in halfwords
Returns
Number of halfwords written/read
4.1.24.7.10. spi_read_blocking
int spi_read_blocking (spi_inst_t * spi, uint8_t repeated_tx_data, uint8_t * dst, size_t len)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 278

Read from an SPI device.
Read len bytes from SPI to dst. Blocks until all data is transferred. No timeout, as SPI hardware always transfers at a
known data rate. repeated_tx_data is output repeatedly on TX as data is read in from RX. Generally this can be 0, but
some devices require a specific value here, e.g. SD cards expect 0xff
Parameters
spi
SPI instance specifier, either spi0 or spi1
repeated_tx_data
Buffer of data to write
dst
Buffer for read data
len
Length of buffer dst
Returns
Number of bytes written/read
4.1.24.7.11. spi_set_baudrate
uint spi_set_baudrate (spi_inst_t * spi, uint baudrate)
Set SPI baudrate.
Set SPI frequency as close as possible to baudrate, and return the actual achieved rate.
Parameters
spi
SPI instance specifier, either spi0 or spi1
baudrate
Baudrate required in Hz, should be capable of a bitrate of at least 2Mbps, or higher, depending on
system clock settings.
Returns
The actual baudrate set
4.1.24.7.12. spi_set_format
static void spi_set_format (spi_inst_t * spi, uint data_bits, spi_cpol_t cpol, spi_cpha_t cpha, __unused spi_order_t
order) [inline], [static]
Configure SPI.
Configure how the SPI serialises and deserialises data on the wire
Parameters
spi
SPI instance specifier, either spi0 or spi1
data_bits
Number of data bits per transfer. Valid values 4..16.
cpol
SSPCLKOUT polarity, applicable to Motorola SPI frame format only.
cpha
SSPCLKOUT phase, applicable to Motorola SPI frame format only
order
Must be SPI_MSB_FIRST, no other values supported on the PL022
4.1.24.7.13. spi_set_slave
static void spi_set_slave (spi_inst_t * spi, bool slave) [inline], [static]
Set SPI master/slave.
Configure the SPI for master- or slave-mode operation. By default, spi_init() sets master-mode.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 279

Parameters
spi
SPI instance specifier, either spi0 or spi1
slave
true to set SPI device as a slave device, false for master.
4.1.24.7.14. spi_write16_blocking
int spi_write16_blocking (spi_inst_t * spi, const uint16_t * src, size_t len)
Write to an SPI device.
Write len halfwords from src to SPI. Discard any data received back. Blocks until all data is transferred. No timeout, as
SPI hardware always transfers at a known data rate.
NOTE
SPI should be initialised with 16 data_bits using spi_set_format first, otherwise this function will only write 8
data_bits.
Parameters
spi
SPI instance specifier, either spi0 or spi1
src
Buffer of data to write
len
Length of buffers
Returns
Number of halfwords written/read
4.1.24.7.15. spi_write16_read16_blocking
int spi_write16_read16_blocking (spi_inst_t * spi, const uint16_t * src, uint16_t * dst, size_t len)
Write/Read half words to/from an SPI device.
Write len halfwords from src to SPI. Simultaneously read len halfwords from SPI to dst. Blocks until all data is
transferred. No timeout, as SPI hardware always transfers at a known data rate.
NOTE
SPI should be initialised with 16 data_bits using spi_set_format first, otherwise this function will only read/write 8
data_bits.
Parameters
spi
SPI instance specifier, either spi0 or spi1
src
Buffer of data to write
dst
Buffer for read data
len
Length of BOTH buffers in halfwords
Returns
Number of halfwords written/read
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 280

4.1.24.7.16. spi_write_blocking
int spi_write_blocking (spi_inst_t * spi, const uint8_t * src, size_t len)
Write to an SPI device, blocking.
Write len bytes from src to SPI, and discard any data received back Blocks until all data is transferred. No timeout, as
SPI hardware always transfers at a known data rate.
Parameters
spi
SPI instance specifier, either spi0 or spi1
src
Buffer of data to write
len
Length of src
Returns
Number of bytes written/read
4.1.24.7.17. spi_write_read_blocking
int spi_write_read_blocking (spi_inst_t * spi, const uint8_t * src, uint8_t * dst, size_t len)
Write/Read to/from an SPI device.
Write len bytes from src to SPI. Simultaneously read len bytes from SPI to dst. Blocks until all data is transferred. No
timeout, as SPI hardware always transfers at a known data rate.
Parameters
spi
SPI instance specifier, either spi0 or spi1
src
Buffer of data to write
dst
Buffer for read data
len
Length of BOTH buffers
Returns
Number of bytes written/read
4.1.25. hardware_sha256
Hardware SHA-256 Accelerator API.
4.1.25.1. Detailed Description
RP2350 is equipped with an implementation of the SHA-256 hash algorithm. The hardware should first be configured by
calling the sha256_set_dma_size and sha256_set_bswap functions. To generate a new hash the hardware should first
be initialised by calling sha256_start. The hardware is ready to accept data when sha256_is_ready returns true, at which
point the data to be hashed can be written to the address returned by sha256_get_write_addr. The hardware requires 64
bytes to be written in one go or else sha256_err_not_ready will indicate an error and the hashing process must be
restarted. sha256_is_sum_valid will return true when there is a valid checksum result which can be retrieved by calling
sha256_get_result.
4.1.25.2. Macros
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 281

•
#define SHA256_RESULT_BYTES 32
4.1.25.3. Enumerations
enum sha256_endianness { SHA256_LITTLE_ENDIAN, SHA256_BIG_ENDIAN }
SHA-256 endianness definition used in the API.
4.1.25.4. Functions
static void sha256_set_dma_size (uint size_in_bytes)
Configure the correct DMA data size.
static void sha256_set_bswap (bool swap)
Enable or disable byte swapping of 32-bit values.
static void sha256_start (void)
Prepare the hardware for a new checksum.
static bool sha256_is_sum_valid (void)
Check if a valid checksum has been calculated.
static bool sha256_is_ready (void)
Check if a the hardware is ready to accept more data.
static void sha256_wait_valid_blocking (void)
Wait until the checksum is valid.
static void sha256_wait_ready_blocking (void)
Wait until the hardware is ready to accept more data.
void sha256_get_result (sha256_result_t *out, enum sha256_endianness endianness)
Get the checksum result.
static bool sha256_err_not_ready (void)
Check if data was written before the hardware was ready.
static void sha256_err_not_ready_clear (void)
Clear the "not ready" error condition.
static volatile void * sha256_get_write_addr (void)
Address to write the data to be hashed.
static void sha256_put_word (uint32_t word)
Write one 32bit word of data to the SHA-256 hardware.
static void sha256_put_byte (uint8_t b)
Write one byte of data to the SHA-256 hardware.
4.1.25.5. Macro Definition Documentation
4.1.25.5.1. SHA256_RESULT_BYTES
#define SHA256_RESULT_BYTES 32
Size of a sha256 result in bytes.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 282

4.1.25.6. Enumeration Type Documentation
4.1.25.6.1. sha256_endianness
enum sha256_endianness
SHA-256 endianness definition used in the API.
Table 30. Enumerator
SHA256_LITTLE_ENDIAN
Little Endian.
SHA256_BIG_ENDIAN
Big Endian.
4.1.25.7. Function Documentation
4.1.25.7.1. sha256_err_not_ready
static bool sha256_err_not_ready (void) [inline], [static]
Check if data was written before the hardware was ready.
Indicates if an error has occurred due to data being written when the hardware is not ready.
Returns
True if data was written before the hardware was ready
4.1.25.7.2. sha256_err_not_ready_clear
static void sha256_err_not_ready_clear (void) [inline], [static]
Clear the "not ready" error condition.
Resets the hardware if a "not ready" error condition is indicated.
4.1.25.7.3. sha256_get_result
void sha256_get_result (sha256_result_t * out, enum sha256_endianness endianness)
Get the checksum result.
Read the 32 byte result calculated by the hardware. Only valid if sha256_is_sum_valid is True
Parameters
out
The checksum result
Copyright (c) 2024 Raspberry Pi (Trading) Ltd.
SPDX-License-Identifier: BSD-3-Clause
4.1.25.7.4. sha256_get_write_addr
static volatile void * sha256_get_write_addr (void) [inline], [static]
Address to write the data to be hashed.
Returns the hardware address where data to be hashed should be written
Returns
Address to write data to be hashed
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 283

4.1.25.7.5. sha256_is_ready
static bool sha256_is_ready (void) [inline], [static]
Check if a the hardware is ready to accept more data.
After writing 64 bytes of data to the hardware, it will be unable to accept more data for a time. Call this to check if the
hardware is ready for more data to be written.
See also
sha256_err_not_ready
Returns
True if the hardware is ready to receive more data
4.1.25.7.6. sha256_is_sum_valid
static bool sha256_is_sum_valid (void) [inline], [static]
Check if a valid checksum has been calculated.
The checksum result will be invalid when data is first written to the hardware, and then once 64 bytes of data has been
written it may take some time to complete the digest of the current block. This function can be used to determine when
the checksum is valid.
Returns
True if sha256_get_result would return a valid result
4.1.25.7.7. sha256_put_byte
static void sha256_put_byte (uint8_t b) [inline], [static]
Write one byte of data to the SHA-256 hardware.
Parameters
b
data to write
4.1.25.7.8. sha256_put_word
static void sha256_put_word (uint32_t word) [inline], [static]
Write one 32bit word of data to the SHA-256 hardware.
Parameters
word
data to write
4.1.25.7.9. sha256_set_bswap
static void sha256_set_bswap (bool swap) [inline], [static]
Enable or disable byte swapping of 32-bit values.
The SHA256 algorithm expects bytes in big endian order, but the system bus deals with little endian data, so control is
provided to convert little endian bus data to big endian internal data. This defaults to true
Parameters
swap
false to disable byte swapping
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 284

4.1.25.7.10. sha256_set_dma_size
static void sha256_set_dma_size (uint size_in_bytes) [inline], [static]
Configure the correct DMA data size.
This must be configured before the DMA channel is triggered and ensures the correct number of transfers is requested
per block.
Parameters
size_in_bytes
Size of DMA transfers, either 1, 2 or 4 bytes only.
4.1.25.7.11. sha256_start
static void sha256_start (void) [inline], [static]
Prepare the hardware for a new checksum.
Called to initialise the hardware before starting the checksum calculation
4.1.25.7.12. sha256_wait_ready_blocking
static void sha256_wait_ready_blocking (void) [inline], [static]
Wait until the hardware is ready to accept more data.
Before writing to the hardware, it’s necessary to check it is ready to accept more data. This function waits until the
hardware is ready to accept more data
4.1.25.7.13. sha256_wait_valid_blocking
static void sha256_wait_valid_blocking (void) [inline], [static]
Wait until the checksum is valid.
When a multiple of 64 bytes of data has been written to the hardware, the checksum will be valid once the digest of the
current block is complete. This function waits until when the checksum result is valid.
4.1.26. hardware_sync
Low level hardware spin locks, barrier and processor event APIs.
4.1.26.1. Detailed Description
4.1.26.1.1. Spin Locks
The RP-series microcontrollers provide 32 hardware spin locks, which can be used to manage mutually-exclusive
access to shared software and hardware resources.
Generally each spin lock itself is a shared resource, i.e. the same hardware spin lock can be used by multiple higher
level primitives (as long as the spin locks are neither held for long periods, nor held concurrently with other spin locks by
the same core - which could lead to deadlock). A hardware spin lock that is exclusively owned can be used individually
without more flexibility and without regard to other software. Note that no hardware spin lock may be acquired re-
entrantly (i.e. hardware spin locks are not on their own safe for use by both thread code and IRQs) however the default
spinlock related methods here (e.g. spin_lock_blocking) always disable interrupts while the lock is held as use by IRQ
handlers and user code is common/desirable, and spin locks are only expected to be held for brief periods.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 285
RP2350 Warning. Due to erratum RP2350-E2, writes to new SIO registers above an offset of +0x180 alias the spinlocks,
causing spurious lock releases. This SDK by default uses atomic memory accesses to implement the
hardware_sync_spin_lock API, as a workaround on RP2350 A2.
The SDK uses the following default spin lock assignments, classifying which spin locks are reserved for
exclusive/special purposes vs those suitable for more general shared use:
Number (ID) Description
0-13 Currently reserved for exclusive use by the SDK and other
libraries. If you use these spin locks, you risk breaking SDK
or other library functionality. Each reserved spin lock used
individually has its own PICO_SPINLOCK_ID so you can
search for those.
14,15 (PICO_SPINLOCK_ID_OS1 and PICO_SPINLOCK_ID_OS2).
Currently reserved for exclusive use by an operating
system (or other system level software) co-existing with
the SDK.
16-23 (PICO_SPINLOCK_ID_STRIPED_FIRST -
PICO_SPINLOCK_ID_STRIPED_LAST). Spin locks from this
range are assigned in a round-robin fashion via
next_striped_spin_lock_num(). These spin locks are
shared, but assigning numbers from a range reduces the
probability that two higher level locking primitives using
striped spin locks will actually be using the same spin
lock.
24-31 (PICO_SPINLOCK_ID_CLAIM_FREE_FIRST -
PICO_SPINLOCK_ID_CLAIM_FREE_LAST). These are
reserved for exclusive use and are allocated on a first
come first served basis at runtime via
spin_lock_claim_unused()
4.1.26.2. Macros
•
#define SW_SPIN_LOCK_TYPE volatile uint8_t
4.1.26.3. Functions
static __force_inline void __nop (void)
Insert a NOP instruction in to the code path.
static __force_inline void __sev (void)
Insert a SEV instruction in to the code path.
static __force_inline void __wfe (void)
Insert a WFE instruction in to the code path.
static __force_inline void __wfi (void)
Insert a WFI instruction in to the code path.
static __force_inline void __dmb (void)
Insert a DMB instruction in to the code path.
static __force_inline void __dsb (void)
Insert a DSB instruction in to the code path.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 286

static __force_inline void __isb (void)
Insert a ISB instruction in to the code path.
static __force_inline void __mem_fence_acquire (void)
Acquire a memory fence.
static __force_inline void __mem_fence_release (void)
Release a memory fence.
static __force_inline uint32_t save_and_disable_interrupts (void)
Save and disable interrupts.
static __force_inline void restore_interrupts (uint32_t status)
Restore interrupts to a specified state.
static __force_inline void restore_interrupts_from_disabled (uint32_t status)
Restore interrupts to a specified state with restricted transitions.
uint next_striped_spin_lock_num (void)
Return a spin lock number from the striped range.
void spin_lock_claim (uint lock_num)
Mark a spin lock as used.
void spin_lock_claim_mask (uint32_t lock_num_mask)
Mark multiple spin locks as used.
void spin_lock_unclaim (uint lock_num)
Mark a spin lock as no longer used.
int spin_lock_claim_unused (bool required)
Claim a free spin lock.
bool spin_lock_is_claimed (uint lock_num)
Determine if a spin lock is claimed.
static __force_inline spin_lock_t * spin_lock_instance (uint lock_num)
Get HW Spinlock instance from number.
static __force_inline uint spin_lock_get_num (spin_lock_t *lock)
Get HW Spinlock number from instance.
static __force_inline void spin_lock_unsafe_blocking (spin_lock_t *lock)
Acquire a spin lock without disabling interrupts (hence unsafe)
static __force_inline void spin_unlock_unsafe (spin_lock_t *lock)
Release a spin lock without re-enabling interrupts.
static __force_inline uint32_t spin_lock_blocking (spin_lock_t *lock)
Acquire a spin lock safely.
static bool is_spin_locked (spin_lock_t *lock)
Check to see if a spinlock is currently acquired elsewhere.
static __force_inline void spin_unlock (spin_lock_t *lock, uint32_t saved_irq)
Release a spin lock safely.
spin_lock_t * spin_lock_init (uint lock_num)
Initialise a spin lock.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 287

void spin_locks_reset (void)
Release all spin locks.
4.1.26.4. Macro Definition Documentation
4.1.26.4.1. SW_SPIN_LOCK_TYPE
#define SW_SPIN_LOCK_TYPE volatile uint8_t
A spin lock identifier.
4.1.26.5. Function Documentation
4.1.26.5.1. __dmb
static __force_inline void __dmb (void) [static]
Insert a DMB instruction in to the code path.
The DMB (data memory barrier) acts as a memory barrier, all memory accesses prior to this instruction will be observed
before any explicit access after the instruction.
4.1.26.5.2. __dsb
static __force_inline void __dsb (void) [static]
Insert a DSB instruction in to the code path.
The DSB (data synchronization barrier) acts as a special kind of data memory barrier (DMB). The DSB operation
completes when all explicit memory accesses before this instruction complete.
4.1.26.5.3. __isb
static __force_inline void __isb (void) [static]
Insert a ISB instruction in to the code path.
ISB acts as an instruction synchronization barrier. It flushes the pipeline of the processor, so that all instructions
following the ISB are fetched from cache or memory again, after the ISB instruction has been completed.
4.1.26.5.4. __mem_fence_acquire
static __force_inline void __mem_fence_acquire (void) [static]
Acquire a memory fence.
4.1.26.5.5. __mem_fence_release
static __force_inline void __mem_fence_release (void) [static]
Release a memory fence.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 288

4.1.26.5.6. __nop
static __force_inline void __nop (void) [static]
Insert a NOP instruction in to the code path.
NOP does nothing for one cycle. On RP2350 Arm binaries this is forced to be a 32-bit instruction to avoid dual-issue of
NOPs.
4.1.26.5.7. __sev
static __force_inline void __sev (void) [static]
Insert a SEV instruction in to the code path.
The SEV (send event) instruction sends an event to both cores.
4.1.26.5.8. __wfe
static __force_inline void __wfe (void) [static]
Insert a WFE instruction in to the code path.
The WFE (wait for event) instruction waits until one of a number of events occurs, including events signalled by the SEV
instruction on either core.
4.1.26.5.9. __wfi
static __force_inline void __wfi (void) [static]
Insert a WFI instruction in to the code path.
The WFI (wait for interrupt) instruction waits for a interrupt to wake up the core.
4.1.26.5.10. is_spin_locked
static bool is_spin_locked (spin_lock_t * lock) [inline], [static]
Check to see if a spinlock is currently acquired elsewhere.
Parameters
lock
Spinlock instance
4.1.26.5.11. next_striped_spin_lock_num
uint next_striped_spin_lock_num (void)
Return a spin lock number from the striped range.
Returns a spin lock number in the range PICO_SPINLOCK_ID_STRIPED_FIRST to PICO_SPINLOCK_ID_STRIPED_LAST in
a round robin fashion. This does not grant the caller exclusive access to the spin lock, so the caller must:
1. Abide (with other callers) by the contract of only holding this spin lock briefly (and with IRQs disabled - the default
via spin_lock_blocking()), and not whilst holding other spin locks.
2. Be OK with any contention caused by the - brief due to the above requirement - contention with other possible
users of the spin lock.
Returns
lock_num a spin lock number the caller may use (non exclusively)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 289

See also
PICO_SPINLOCK_ID_STRIPED_FIRST
PICO_SPINLOCK_ID_STRIPED_LAST
4.1.26.5.12. restore_interrupts
static __force_inline void restore_interrupts (uint32_t status) [static]
Restore interrupts to a specified state.
Parameters
status
Previous interrupt status from save_and_disable_interrupts()
4.1.26.5.13. restore_interrupts_from_disabled
static __force_inline void restore_interrupts_from_disabled (uint32_t status) [static]
Restore interrupts to a specified state with restricted transitions.
This method should only be used when the interrupt state is known to be disabled, e.g. when paired with
save_and_disable_interrupts()
Parameters
status
Previous interrupt status from save_and_disable_interrupts()
4.1.26.5.14. save_and_disable_interrupts
static __force_inline uint32_t save_and_disable_interrupts (void) [static]
Save and disable interrupts.
Returns
The prior interrupt enable status for restoration later via restore_interrupts()
4.1.26.5.15. spin_lock_blocking
static __force_inline uint32_t spin_lock_blocking (spin_lock_t * lock) [static]
Acquire a spin lock safely.
This function will disable interrupts prior to acquiring the spinlock
Parameters
lock
Spinlock instance
Returns
interrupt status to be used when unlocking, to restore to original state
4.1.26.5.16. spin_lock_claim
void spin_lock_claim (uint lock_num)
Mark a spin lock as used.
Method for cooperative claiming of hardware. Will cause a panic if the spin lock is already claimed. Use of this method
by libraries detects accidental configurations that would fail in unpredictable ways.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 290

Parameters
lock_num
the spin lock number
4.1.26.5.17. spin_lock_claim_mask
void spin_lock_claim_mask (uint32_t lock_num_mask)
Mark multiple spin locks as used.
Method for cooperative claiming of hardware. Will cause a panic if any of the spin locks are already claimed. Use of this
method by libraries detects accidental configurations that would fail in unpredictable ways.
Parameters
lock_num_mask
Bitfield of all required spin locks to claim (bit 0 == spin lock 0, bit 1 == spin lock 1 etc)
4.1.26.5.18. spin_lock_claim_unused
int spin_lock_claim_unused (bool required)
Claim a free spin lock.
Parameters
required
if true the function will panic if none are available
Returns
the spin lock number or -1 if required was false, and none were free
4.1.26.5.19. spin_lock_get_num
static __force_inline uint spin_lock_get_num (spin_lock_t * lock) [static]
Get HW Spinlock number from instance.
Parameters
lock
The Spinlock instance
Returns
The Spinlock ID
4.1.26.5.20. spin_lock_init
spin_lock_t * spin_lock_init (uint lock_num)
Initialise a spin lock.
The spin lock is initially unlocked
Parameters
lock_num
The spin lock number
Returns
The spin lock instance
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 291

4.1.26.5.21. spin_lock_instance
static __force_inline spin_lock_t * spin_lock_instance (uint lock_num) [static]
Get HW Spinlock instance from number.
Parameters
lock_num
Spinlock ID
Returns
The spinlock instance
4.1.26.5.22. spin_lock_is_claimed
bool spin_lock_is_claimed (uint lock_num)
Determine if a spin lock is claimed.
Parameters
lock_num
the spin lock number
Returns
true if claimed, false otherwise
See also
spin_lock_claim
spin_lock_claim_mask
4.1.26.5.23. spin_lock_unclaim
void spin_lock_unclaim (uint lock_num)
Mark a spin lock as no longer used.
Method for cooperative claiming of hardware.
Parameters
lock_num
the spin lock number to release
4.1.26.5.24. spin_lock_unsafe_blocking
static __force_inline void spin_lock_unsafe_blocking (spin_lock_t * lock) [static]
Acquire a spin lock without disabling interrupts (hence unsafe)
Parameters
lock
Spinlock instance
4.1.26.5.25. spin_locks_reset
void spin_locks_reset (void)
Release all spin locks.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 292

4.1.26.5.26. spin_unlock
static __force_inline void spin_unlock (spin_lock_t * lock, uint32_t saved_irq) [static]
Release a spin lock safely.
This function will re-enable interrupts according to the parameters.
Parameters
lock
Spinlock instance
saved_irq
Return value from the spin_lock_blocking() function.
See also
spin_lock_blocking()
4.1.26.5.27. spin_unlock_unsafe
static __force_inline void spin_unlock_unsafe (spin_lock_t * lock) [static]
Release a spin lock without re-enabling interrupts.
Parameters
lock
Spinlock instance
4.1.27. hardware_ticks
Hardware Tick API.
4.1.27.1. Detailed Description
RP2040 only has one tick generator, and it is part of the watchdog hardware.
The RP2350 has a dedicated Tick block that is used to supply ticks to TIMER0, TIMER1, RISC-V platform timer, Arm
Cortex-M33 0 timer, Arm Cortex-M33 1 timer and the WATCHDOG block.
4.1.27.2. Typedefs
typedef enum tick_gen_num_rp2350 tick_gen_num_t
Tick generator numbers on RP2350 (used as typedef tick_gen_num_t)
typedef enum tick_gen_num_rp2040 tick_gen_num_t
Tick generator numbers on RP2040 (used as typedef tick_gen_num_t)
4.1.27.3. Enumerations
enum tick_gen_num_rp2350 { TICK_PROC0 = 0, TICK_PROC1 = 1, TICK_TIMER0 = 2, TICK_TIMER1 = 3, TICK_WATCHDOG = 4,
TICK_RISCV = 5, TICK_COUNT }
Tick generator numbers on RP2350 (used as typedef tick_gen_num_t)
enum tick_gen_num_rp2040 { TICK_WATCHDOG = 0, TICK_COUNT }
Tick generator numbers on RP2040 (used as typedef tick_gen_num_t)
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 293

4.1.27.4. Functions
void tick_start (tick_gen_num_t tick, uint cycles)
Start a tick generator.
void tick_stop (tick_gen_num_t tick)
Stop a tick generator.
bool tick_is_running (tick_gen_num_t tick)
Check if a tick genererator is currently running.
4.1.27.5. Typedef Documentation
4.1.27.5.1. tick_gen_num_t
typedef enum tick_gen_num_rp2350 tick_gen_num_t
Tick generator numbers on RP2350 (used as typedef tick_gen_num_t)
4.1.27.5.2. tick_gen_num_t
typedef enum tick_gen_num_rp2040 tick_gen_num_t
Tick generator numbers on RP2040 (used as typedef tick_gen_num_t)
RP2040 only has one tick generator, and it is part of the watchdog hardware
4.1.27.6. Enumeration Type Documentation
4.1.27.6.1. tick_gen_num_rp2350
enum tick_gen_num_rp2350
Tick generator numbers on RP2350 (used as typedef tick_gen_num_t)
4.1.27.6.2. tick_gen_num_rp2040
enum tick_gen_num_rp2040
Tick generator numbers on RP2040 (used as typedef tick_gen_num_t)
RP2040 only has one tick generator, and it is part of the watchdog hardware
4.1.27.7. Function Documentation
4.1.27.7.1. tick_is_running
bool tick_is_running (tick_gen_num_t tick)
Check if a tick genererator is currently running.
Parameters
tick
The tick generator number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 294

Returns
true if the specific ticker is running.
4.1.27.7.2. tick_start
void tick_start (tick_gen_num_t tick, uint cycles)
Start a tick generator.
Parameters
tick
The tick generator number
cycles
The number of clock cycles per tick
4.1.27.7.3. tick_stop
void tick_stop (tick_gen_num_t tick)
Stop a tick generator.
Parameters
tick
The tick generator number
4.1.28. hardware_timer
Low-level hardware timer API.
4.1.28.1. Detailed Description
This API provides medium level access to the timer HW. See also pico_time which provides higher levels functionality
using the hardware timer.
The timer peripheral on RP-series microcontrollers supports the following features:
•
RP2040 single 64-bit counter, incrementing once per microsecond
•
RP2350 two 64-bit counters, ticks generated from the tick block
•
Latching two-stage read of counter, for race-free read over 32 bit bus
•
Four alarms: match on the lower 32 bits of counter, IRQ on match.
On RP2040, by default the timer uses a one microsecond reference that is generated in the Watchdog (see RP2040
Datasheet Section 4.8.2) which is derived from the clk_ref.
On RP2350, by default the timer uses a one microsecond reference that is generated by the tick block (see RP2350
Datasheet Section 8.5)
The timer has 4 alarms, and can output a separate interrupt for each alarm. The alarms match on the lower 32 bits of
the 64 bit counter which means they can be fired a maximum of 2^32 microseconds into the future. This is equivalent
to:
•
2^32 ÷ 10^6: ~4295 seconds
•
4295 ÷ 60: ~72 minutes
The timer is expected to be used for short sleeps, if you want a longer alarm see the hardware_rtc functions.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 295

4.1.28.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3
Ê4 volatile bool timer_fired = false;
Ê5
Ê6 int64_t alarm_callback(alarm_id_t id, __unused void *user_data) {
Ê7 printf("Timer %d fired!\n", (int) id);
Ê8 timer_fired = true;
Ê9 // Can return a value here in us to fire in the future
10 return 0;
11 }
12
13 bool repeating_timer_callback(__unused struct repeating_timer *t) {
14 printf("Repeat at %lld\n", time_us_64());
15 return true;
16 }
17
18 int main() {
19 stdio_init_all();
20 printf("Hello Timer!\n");
21
22 // Call alarm_callback in 2 seconds
23 add_alarm_in_ms(2000, alarm_callback, NULL, false);
24
25 // Wait for alarm callback to set timer_fired
26 while (!timer_fired) {
27 tight_loop_contents();
28 }
29
30 // Create a repeating timer that calls repeating_timer_callback.
31 // If the delay is > 0 then this is the delay between the previous callback ending and the
Ê next starting.
32 // If the delay is negative (see below) then the next call to the callback will be exactly
Ê 500ms after the
33 // start of the call to the last callback
34 struct repeating_timer timer;
35 add_repeating_timer_ms(500, repeating_timer_callback, NULL, &timer);
36 sleep_ms(3000);
37 bool cancelled = cancel_repeating_timer(&timer);
38 printf("cancelled... %d\n", cancelled);
39 sleep_ms(2000);
40
41 // Negative delay so means we will call repeating_timer_callback, and call it again
42 // 500ms later regardless of how long the callback took to execute
43 add_repeating_timer_ms(-500, repeating_timer_callback, NULL, &timer);
44 sleep_ms(3000);
45 cancelled = cancel_repeating_timer(&timer);
46 printf("cancelled... %d\n", cancelled);
47 sleep_ms(2000);
48 printf("Done\n");
49 return 0;
50 }
See also
pico_time
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 296

4.1.28.2. Macros
•
#define TIMER_ALARM_IRQ_NUM(timer, alarm_num)
•
#define TIMER_ALARM_NUM_FROM_IRQ(irq_num)
•
#define TIMER_NUM_FROM_IRQ(irq_num)
•
#define PICO_DEFAULT_TIMER 0
•
#define PICO_DEFAULT_TIMER_INSTANCE()
4.1.28.3. Typedefs
typedef void(* hardware_alarm_callback_t)(uint alarm_num)
4.1.28.4. Functions
static uint32_t timer_time_us_32 (timer_hw_t *timer)
Return a 32 bit timestamp value in microseconds for a given timer instance.
static uint32_t time_us_32 (void)
Return a 32 bit timestamp value in microseconds for the default timer instance.
uint64_t timer_time_us_64 (timer_hw_t *timer)
Return the current 64 bit timestamp value in microseconds for a given timer instance.
uint64_t time_us_64 (void)
Return the current 64 bit timestamp value in microseconds for the default timer instance.
void timer_busy_wait_us_32 (timer_hw_t *timer, uint32_t delay_us)
Busy wait wasting cycles for the given (32 bit) number of microseconds using the given timer instance.
void busy_wait_us_32 (uint32_t delay_us)
Busy wait wasting cycles for the given (32 bit) number of microseconds using the default timer instance.
void timer_busy_wait_us (timer_hw_t *timer, uint64_t delay_us)
Busy wait wasting cycles for the given (64 bit) number of microseconds using the given timer instance.
void busy_wait_us (uint64_t delay_us)
Busy wait wasting cycles for the given (64 bit) number of microseconds using the default timer instance.
void timer_busy_wait_ms (timer_hw_t *timer, uint32_t delay_ms)
Busy wait wasting cycles for the given number of milliseconds using the given timer instance.
void busy_wait_ms (uint32_t delay_ms)
Busy wait wasting cycles for the given number of milliseconds using the default timer instance.
void timer_busy_wait_until (timer_hw_t *timer, absolute_time_t t)
Busy wait wasting cycles until after the specified timestamp using the given timer instance.
void busy_wait_until (absolute_time_t t)
Busy wait wasting cycles until after the specified timestamp using the default timer instance.
static bool timer_time_reached (timer_hw_t *timer, absolute_time_t t)
Check if the specified timestamp has been reached on the given timer instance.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 297

static bool time_reached (absolute_time_t t)
Check if the specified timestamp has been reached on the default timer instance.
void timer_hardware_alarm_claim (timer_hw_t *timer, uint alarm_num)
cooperatively claim the use of this hardware alarm_num on the given timer instance
void hardware_alarm_claim (uint alarm_num)
cooperatively claim the use of this hardware alarm_num on the default timer instance
int timer_hardware_alarm_claim_unused (timer_hw_t *timer, bool required)
cooperatively claim the use of a hardware alarm_num on the given timer instance
int hardware_alarm_claim_unused (bool required)
cooperatively claim the use of a hardware alarm_num on the default timer instance
void timer_hardware_alarm_unclaim (timer_hw_t *timer, uint alarm_num)
cooperatively release the claim on use of this hardware alarm_num on the given timer instance
void hardware_alarm_unclaim (uint alarm_num)
cooperatively release the claim on use of this hardware alarm_num on the default timer instance
bool timer_hardware_alarm_is_claimed (timer_hw_t *timer, uint alarm_num)
Determine if a hardware alarm has been claimed on the given timer instance.
bool hardware_alarm_is_claimed (uint alarm_num)
Determine if a hardware alarm has been claimed on the default timer instance.
void timer_hardware_alarm_set_callback (timer_hw_t *timer, uint alarm_num, hardware_alarm_callback_t callback)
Enable/Disable a callback for a hardware alarm for a given timer instance on this core.
void hardware_alarm_set_callback (uint alarm_num, hardware_alarm_callback_t callback)
Enable/Disable a callback for a hardware alarm on the default timer instance on this core.
bool timer_hardware_alarm_set_target (timer_hw_t *timer, uint alarm_num, absolute_time_t t)
Set the current target for a specific hardware alarm on the given timer instance.
bool hardware_alarm_set_target (uint alarm_num, absolute_time_t t)
Set the current target for the specified hardware alarm on the default timer instance.
void timer_hardware_alarm_cancel (timer_hw_t *timer, uint alarm_num)
Cancel an existing target (if any) for a specific hardware_alarm on the given timer instance.
void hardware_alarm_cancel (uint alarm_num)
Cancel an existing target (if any) for the specified hardware_alarm on the default timer instance.
void timer_hardware_alarm_force_irq (timer_hw_t *timer, uint alarm_num)
Force and IRQ for a specific hardware alarm on the given timer instance.
void hardware_alarm_force_irq (uint alarm_num)
Force and IRQ for a specific hardware alarm on the default timer instance.
static uint timer_hardware_alarm_get_irq_num (__unused timer_hw_t *timer, uint alarm_num)
Returns the irq_num_t for the alarm interrupt from the given alarm on the given timer instance.
static uint hardware_alarm_get_irq_num (timer_hw_t *timer, uint alarm_num)
Returns the irq_num_t for the alarm interrupt from the given alarm on the default timer instance.
static uint timer_get_index (timer_hw_t *timer)
Returns the timer number for a timer instance.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 298

static timer_hw_t * timer_get_instance (uint timer_num)
Returns the timer instance with the given timer number.
4.1.28.5. Macro Definition Documentation
4.1.28.5.1. TIMER_ALARM_IRQ_NUM
#define TIMER_ALARM_IRQ_NUM(timer, alarm_num)
Returns the irq_num_t for the alarm interrupt from the given alarm on the given timer instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.28.5.2. TIMER_ALARM_NUM_FROM_IRQ
#define TIMER_ALARM_NUM_FROM_IRQ(irq_num)
Returns the alarm number from an \irq_num_t. See TIMER_INSTANCE_NUM_FROM_IRQ to get the timer instance
number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.28.5.3. TIMER_NUM_FROM_IRQ
#define TIMER_NUM_FROM_IRQ(irq_num)
Returns the alarm number from an \irq_num_t. See TIMER_INSTANCE_NUM_FROM_IRQ to get the alarm number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.28.5.4. PICO_DEFAULT_TIMER
#define PICO_DEFAULT_TIMER 0
The default timer instance number of the timer instance used for APIs that don’t take an explicit timer instance On
RP2040 this must be 0 as there is only one timer instance On RP2040 this may be set to 0 or 1 .
4.1.28.5.5. PICO_DEFAULT_TIMER_INSTANCE
#define PICO_DEFAULT_TIMER_INSTANCE()
Returns the default timer instance on the platform based on the setting of PICO_DEFAULT_TIMER.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.28.6. Typedef Documentation
4.1.28.6.1. hardware_alarm_callback_t
typedef void(* hardware_alarm_callback_t) (uint alarm_num)
Callback function type for hardware alarms
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 299

alarm_num
the hardware alarm number
See also
hardware_alarm_set_callback()
4.1.28.7. Function Documentation
4.1.28.7.1. busy_wait_ms
void busy_wait_ms (uint32_t delay_ms)
Busy wait wasting cycles for the given number of milliseconds using the default timer instance.
Parameters
delay_ms
delay amount in milliseconds
See also
timer_busy_wait_ms
4.1.28.7.2. busy_wait_until
void busy_wait_until (absolute_time_t t)
Busy wait wasting cycles until after the specified timestamp using the default timer instance.
Parameters
t
Absolute time to wait until
See also
timer_busy_wait_until
4.1.28.7.3. busy_wait_us
void busy_wait_us (uint64_t delay_us)
Busy wait wasting cycles for the given (64 bit) number of microseconds using the default timer instance.
Parameters
delay_us
delay amount in microseconds
See also
timer_busy_wait_us
4.1.28.7.4. busy_wait_us_32
void busy_wait_us_32 (uint32_t delay_us)
Busy wait wasting cycles for the given (32 bit) number of microseconds using the default timer instance.
Parameters
delay_us
delay amount in microseconds
See also
timer_busy_wait_us_32
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 300

4.1.28.7.5. hardware_alarm_cancel
void hardware_alarm_cancel (uint alarm_num)
Cancel an existing target (if any) for the specified hardware_alarm on the default timer instance.
Parameters
alarm_num
the hardware alarm number
See also
timer_hardware_alarm_cancel
4.1.28.7.6. hardware_alarm_claim
void hardware_alarm_claim (uint alarm_num)
cooperatively claim the use of this hardware alarm_num on the default timer instance
This method hard asserts if the hardware alarm is currently claimed.
Parameters
alarm_num
the hardware alarm to claim
See also
timer_hardware_alarm_claim
hardware_claiming
4.1.28.7.7. hardware_alarm_claim_unused
int hardware_alarm_claim_unused (bool required)
cooperatively claim the use of a hardware alarm_num on the default timer instance
This method attempts to claim an unused hardware alarm
Parameters
required
if true the function will panic if none are available
Returns
alarm_num the hardware alarm claimed or -1 if required was false, and none are available
See also
timer_hardware_alarm_claim_unused
hardware_claiming
4.1.28.7.8. hardware_alarm_force_irq
void hardware_alarm_force_irq (uint alarm_num)
Force and IRQ for a specific hardware alarm on the default timer instance.
This method will forcibly make sure the current alarm callback (if present) for the hardware alarm is called from an IRQ
context after this call. If an actual callback is due at the same time then the callback may only be called once.
Calling this method does not otherwise interfere with regular callback operations.
Parameters
alarm_num
the hardware alarm number
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 301

See also
timer_hardware_alarm_force_irq
4.1.28.7.9. hardware_alarm_get_irq_num
static uint hardware_alarm_get_irq_num (timer_hw_t * timer, uint alarm_num) [inline], [static]
Returns the irq_num_t for the alarm interrupt from the given alarm on the default timer instance.
Parameters
timer
the timer instance
alarm_num
the alarm number
4.1.28.7.10. hardware_alarm_is_claimed
bool hardware_alarm_is_claimed (uint alarm_num)
Determine if a hardware alarm has been claimed on the default timer instance.
Parameters
alarm_num
the hardware alarm number
Returns
true if claimed, false otherwise
See also
timer_hardware_alarm_is_claimed
hardware_alarm_claim
4.1.28.7.11. hardware_alarm_set_callback
void hardware_alarm_set_callback (uint alarm_num, hardware_alarm_callback_t callback)
Enable/Disable a callback for a hardware alarm on the default timer instance on this core.
This method enables/disables the alarm IRQ for the specified hardware alarm on the calling core, and set the specified
callback to be associated with that alarm.
This callback will be used for the timeout set via hardware_alarm_set_target
NOTE
This will install the handler on the current core if the IRQ handler isn’t already set. Therefore the user has the
opportunity to call this up from the core of their choice
Parameters
alarm_num
the hardware alarm number
callback
the callback to install, or NULL to unset
See also
timer_hardware_alarm_set_callback
hardware_alarm_set_target()
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 302

4.1.28.7.12. hardware_alarm_set_target
bool hardware_alarm_set_target (uint alarm_num, absolute_time_t t)
Set the current target for the specified hardware alarm on the default timer instance.
This will replace any existing target
Parameters
alarm_num
the hardware alarm number
t
the target timestamp
Returns
true if the target was "missed"; i.e. it was in the past, or occurred before a future hardware timeout could be set
See also
timer_hardware_alarm_set_target
4.1.28.7.13. hardware_alarm_unclaim
void hardware_alarm_unclaim (uint alarm_num)
cooperatively release the claim on use of this hardware alarm_num on the default timer instance
Parameters
alarm_num
the hardware alarm to unclaim
See also
timer_hardware_alarm_unclaim
hardware_claiming
4.1.28.7.14. time_reached
static bool time_reached (absolute_time_t t) [inline], [static]
Check if the specified timestamp has been reached on the default timer instance.
Parameters
t
Absolute time to compare against current time
Returns
true if it is now after the specified timestamp
See also
timer_time_reached
4.1.28.7.15. time_us_32
static uint32_t time_us_32 (void) [inline], [static]
Return a 32 bit timestamp value in microseconds for the default timer instance.
Returns the low 32 bits of the hardware timer.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 303

NOTE
This value wraps roughly every 1 hour 11 minutes and 35 seconds.
Returns
the 32 bit timestamp
See also
timer_time_us_32
4.1.28.7.16. time_us_64
uint64_t time_us_64 (void)
Return the current 64 bit timestamp value in microseconds for the default timer instance.
Returns the full 64 bits of the hardware timer. The pico_time and other functions rely on the fact that this value
monotonically increases from power up. As such it is expected that this value counts upwards and never wraps (we
apologize for introducing a potential year 5851444 bug).
Returns
the 64 bit timestamp
See also
timer_time_us_64
4.1.28.7.17. timer_busy_wait_ms
void timer_busy_wait_ms (timer_hw_t * timer, uint32_t delay_ms)
Busy wait wasting cycles for the given number of milliseconds using the given timer instance.
Parameters
timer
the timer instance
delay_ms
delay amount in milliseconds
See also
busy_wait_ms
4.1.28.7.18. timer_busy_wait_until
void timer_busy_wait_until (timer_hw_t * timer, absolute_time_t t)
Busy wait wasting cycles until after the specified timestamp using the given timer instance.
Parameters
timer
the timer instance
t
Absolute time to wait until
See also
busy_wait_until
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 304

4.1.28.7.19. timer_busy_wait_us
void timer_busy_wait_us (timer_hw_t * timer, uint64_t delay_us)
Busy wait wasting cycles for the given (64 bit) number of microseconds using the given timer instance.
Parameters
timer
the timer instance
delay_us
delay amount in microseconds
See also
busy_wait_us
4.1.28.7.20. timer_busy_wait_us_32
void timer_busy_wait_us_32 (timer_hw_t * timer, uint32_t delay_us)
Busy wait wasting cycles for the given (32 bit) number of microseconds using the given timer instance.
Parameters
timer
the timer instance
delay_us
delay amount in microseconds
See also
busy_wait_us_32
Busy wait wasting cycles for the given (32 bit) number of microseconds using the given timer instance.
4.1.28.7.21. timer_get_index
static uint timer_get_index (timer_hw_t * timer) [inline], [static]
Returns the timer number for a timer instance.
Parameters
timer
the timer instance
Returns
the timer number
See also
TIMER_NUM
4.1.28.7.22. timer_get_instance
static timer_hw_t * timer_get_instance (uint timer_num) [inline], [static]
Returns the timer instance with the given timer number.
Parameters
timer_num
the timer number
Returns
the timer instance
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 305

4.1.28.7.23. timer_hardware_alarm_cancel
void timer_hardware_alarm_cancel (timer_hw_t * timer, uint alarm_num)
Cancel an existing target (if any) for a specific hardware_alarm on the given timer instance.
Parameters
timer
the timer instance
alarm_num
the hardware alarm number
See also
hardware_alarm_cancel
4.1.28.7.24. timer_hardware_alarm_claim
void timer_hardware_alarm_claim (timer_hw_t * timer, uint alarm_num)
cooperatively claim the use of this hardware alarm_num on the given timer instance
This method hard asserts if the hardware alarm is currently claimed.
Parameters
timer
the timer instance
alarm_num
the hardware alarm to claim
See also
hardware_alarm_claim
hardware_claiming
4.1.28.7.25. timer_hardware_alarm_claim_unused
int timer_hardware_alarm_claim_unused (timer_hw_t * timer, bool required)
cooperatively claim the use of a hardware alarm_num on the given timer instance
This method attempts to claim an unused hardware alarm
Parameters
timer
the timer instance
required
if true the function will panic if none are available
Returns
alarm_num the hardware alarm claimed or -1 if required was false, and none are available
See also
hardware_alarm_claim_unused
hardware_claiming
4.1.28.7.26. timer_hardware_alarm_force_irq
void timer_hardware_alarm_force_irq (timer_hw_t * timer, uint alarm_num)
Force and IRQ for a specific hardware alarm on the given timer instance.
This method will forcibly make sure the current alarm callback (if present) for the hardware alarm is called from an IRQ
context after this call. If an actual callback is due at the same time then the callback may only be called once.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 306

Calling this method does not otherwise interfere with regular callback operations.
Parameters
timer
the timer instance
alarm_num
the hardware alarm number
See also
hardware_alarm_force_irq
4.1.28.7.27. timer_hardware_alarm_get_irq_num
static uint timer_hardware_alarm_get_irq_num (__unused timer_hw_t * timer, uint alarm_num) [inline], [static]
Returns the irq_num_t for the alarm interrupt from the given alarm on the given timer instance.
Parameters
timer
the timer instance
alarm_num
the alarm number
See also
TIMER_ALARM_IRQ_NUM
4.1.28.7.28. timer_hardware_alarm_is_claimed
bool timer_hardware_alarm_is_claimed (timer_hw_t * timer, uint alarm_num)
Determine if a hardware alarm has been claimed on the given timer instance.
Parameters
timer
the timer instance
alarm_num
the hardware alarm number
Returns
true if claimed, false otherwise
See also
hardware_alarm_is_claimed
hardware_alarm_claim
4.1.28.7.29. timer_hardware_alarm_set_callback
void timer_hardware_alarm_set_callback (timer_hw_t * timer, uint alarm_num, hardware_alarm_callback_t callback)
Enable/Disable a callback for a hardware alarm for a given timer instance on this core.
This method enables/disables the alarm IRQ for the specified hardware alarm on the calling core, and set the specified
callback to be associated with that alarm.
This callback will be used for the timeout set via hardware_alarm_set_target
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 307

NOTE
This will install the handler on the current core if the IRQ handler isn’t already set. Therefore the user has the
opportunity to call this up from the core of their choice
Parameters
timer
the timer instance
alarm_num
the hardware alarm number
callback
the callback to install, or NULL to unset
See also
hardware_alarm_set_callback
timer_hardware_alarm_set_target()
4.1.28.7.30. timer_hardware_alarm_set_target
bool timer_hardware_alarm_set_target (timer_hw_t * timer, uint alarm_num, absolute_time_t t)
Set the current target for a specific hardware alarm on the given timer instance.
This will replace any existing target
Parameters
timer
the timer instance
alarm_num
the hardware alarm number
t
the target timestamp
Returns
true if the target was "missed"; i.e. it was in the past, or occurred before a future hardware timeout could be set
See also
hardware_alarm_set_target
4.1.28.7.31. timer_hardware_alarm_unclaim
void timer_hardware_alarm_unclaim (timer_hw_t * timer, uint alarm_num)
cooperatively release the claim on use of this hardware alarm_num on the given timer instance
Parameters
timer
the timer instance
alarm_num
the hardware alarm to unclaim
See also
hardware_alarm_unclaim
hardware_claiming
4.1.28.7.32. timer_time_reached
static bool timer_time_reached (timer_hw_t * timer, absolute_time_t t) [inline], [static]
Check if the specified timestamp has been reached on the given timer instance.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 308

Parameters
timer
the timer instance
t
Absolute time to compare against current time
Returns
true if it is now after the specified timestamp
See also
time_reached
4.1.28.7.33. timer_time_us_32
static uint32_t timer_time_us_32 (timer_hw_t * timer) [inline], [static]
Return a 32 bit timestamp value in microseconds for a given timer instance.
Returns the low 32 bits of the hardware timer.
NOTE
This value wraps roughly every 1 hour 11 minutes and 35 seconds.
Parameters
timer
the timer instance
Returns
the 32 bit timestamp
See also
time_us_32
4.1.28.7.34. timer_time_us_64
uint64_t timer_time_us_64 (timer_hw_t * timer)
Return the current 64 bit timestamp value in microseconds for a given timer instance.
Returns the full 64 bits of the hardware timer. The pico_time and other functions rely on the fact that this value
monotonically increases from power up. As such it is expected that this value counts upwards and never wraps (we
apologize for introducing a potential year 5851444 bug).
Parameters
timer
the timer instance
Returns
the 64 bit timestamp
See also
time_us_64
Return the current 64 bit timestamp value in microseconds for a given timer instance.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 309

4.1.29. hardware_uart
Hardware UART API.
4.1.29.1. Detailed Description
RP-series microcontrollers have 2 identical instances of a UART peripheral, based on the ARM PL011. Each UART can
be connected to a number of GPIO pins as defined in the GPIO muxing.
Only the TX, RX, RTS, and CTS signals are connected, meaning that the modem mode and IrDA mode of the PL011 are
not supported.
4.1.29.1.1. Example
Ê1 int main() {
Ê2
Ê3 // Set the GPIO pin mux to the UART - pin 0 is TX, 1 is RX; note use of UART_FUNCSEL_NUM
Ê for the general
Ê4 // case where the func sel used for UART depends on the pin number
Ê5 // Do this before calling uart_init to avoid losing data
Ê6 gpio_set_function(0, UART_FUNCSEL_NUM(uart0, 0));
Ê7 gpio_set_function(1, UART_FUNCSEL_NUM(uart0, 1));
Ê8
Ê9 // Initialise UART 0
10 uart_init(uart0, 115200);
11
12 uart_puts(uart0, "Hello world!");
13 }
4.1.29.2. Macros
•
#define UART_NUM(uart)
•
#define UART_INSTANCE(num)
•
#define UART_DREQ_NUM(uart, is_tx)
•
#define UART_CLOCK_NUM(uart)
•
#define UART_FUNCSEL_NUM(uart, gpio)
•
#define UART_IRQ_NUM(uart)
•
#define UART_RESET_NUM(uart)
4.1.29.3. Enumerations
enum uart_parity_t { UART_PARITY_NONE, UART_PARITY_EVEN, UART_PARITY_ODD }
UART Parity enumeration.
4.1.29.4. Functions
static uint uart_get_index (uart_inst_t *uart)
Convert UART instance to hardware instance number.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 310

static uart_inst_t * uart_get_instance (uint num)
Get the UART instance from an instance number.
static uart_hw_t * uart_get_hw (uart_inst_t *uart)
Get the real hardware UART instance from a UART instance.
uint uart_init (uart_inst_t *uart, uint baudrate)
Initialise a UART.
void uart_deinit (uart_inst_t *uart)
DeInitialise a UART.
uint uart_set_baudrate (uart_inst_t *uart, uint baudrate)
Set UART baud rate.
static void uart_set_hw_flow (uart_inst_t *uart, bool cts, bool rts)
Set UART flow control CTS/RTS.
void uart_set_format (uart_inst_t *uart, uint data_bits, uint stop_bits, uart_parity_t parity)
Set UART data format.
static void uart_set_irqs_enabled (uart_inst_t *uart, bool rx_has_data, bool tx_needs_data)
Enable/Disable UART interrupt outputs.
static bool uart_is_enabled (uart_inst_t *uart)
Test if specific UART is enabled.
void uart_set_fifo_enabled (uart_inst_t *uart, bool enabled)
Enable/Disable the FIFOs on specified UART.
static bool uart_is_writable (uart_inst_t *uart)
Determine if space is available in the TX FIFO.
static void uart_tx_wait_blocking (uart_inst_t *uart)
Wait for the UART TX fifo to be drained.
static bool uart_is_readable (uart_inst_t *uart)
Determine whether data is waiting in the RX FIFO.
static void uart_write_blocking (uart_inst_t *uart, const uint8_t *src, size_t len)
Write to the UART for transmission.
static void uart_read_blocking (uart_inst_t *uart, uint8_t *dst, size_t len)
Read from the UART.
static void uart_putc_raw (uart_inst_t *uart, char c)
Write single character to UART for transmission.
static void uart_putc (uart_inst_t *uart, char c)
Write single character to UART for transmission, with optional CR/LF conversions.
static void uart_puts (uart_inst_t *uart, const char *s)
Write string to UART for transmission, doing any CR/LF conversions.
static char uart_getc (uart_inst_t *uart)
Read a single character from the UART.
void uart_set_break (uart_inst_t *uart, bool en)
Assert a break condition on the UART transmission.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 311

void uart_set_translate_crlf (uart_inst_t *uart, bool translate)
Set CR/LF conversion on UART.
static void uart_default_tx_wait_blocking (void)
Wait for the default UART’s TX FIFO to be drained.
bool uart_is_readable_within_us (uart_inst_t *uart, uint32_t us)
Wait for up to a certain number of microseconds for the RX FIFO to be non empty.
static uint uart_get_dreq_num (uart_inst_t *uart, bool is_tx)
Return the dreq_num_t to use for pacing transfers to/from a particular UART instance.
static uint uart_get_reset_num (uart_inst_t *uart)
Return the reset_num_t to use for pacing transfers to/from a particular UART instance.
4.1.29.4.1. uart0
#define uart0 ((uart_inst_t *)uart0_hw)
Identifier for UART instance 0.
The UART identifiers for use in UART functions.
e.g. uart_init(uart1, 48000)
4.1.29.4.2. uart1
#define uart1 ((uart_inst_t *)uart1_hw)
Identifier for UART instance 1.
4.1.29.5. Macro Definition Documentation
4.1.29.5.1. UART_NUM
#define UART_NUM(uart)
Returns the UART number for a UART instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.5.2. UART_INSTANCE
#define UART_INSTANCE(num)
Returns the UART instance with the given UART number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.5.3. UART_DREQ_NUM
#define UART_DREQ_NUM(uart, is_tx)
Returns the dreq_num_t used for pacing DMA transfers to or from this UART instance. If is_tx is true, then it is for
transfers to the UART else for transfers from the UART.
Note this macro is intended to resolve at compile time, and does no parameter checking
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 312

4.1.29.5.4. UART_CLOCK_NUM
#define UART_CLOCK_NUM(uart)
Returns clock_num_t of the clock for the given UART instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.5.5. UART_FUNCSEL_NUM
#define UART_FUNCSEL_NUM(uart, gpio)
Returns gpio_function_t needed to select the UART function for the given UART instance on the given GPIO number.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.5.6. UART_IRQ_NUM
#define UART_IRQ_NUM(uart)
Returns the irq_num_t for processor interrupts from the given UART instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.5.7. UART_RESET_NUM
#define UART_RESET_NUM(uart)
Returns the reset_num_t used to reset a given UART instance.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.1.29.6. Enumeration Type Documentation
4.1.29.6.1. uart_parity_t
enum uart_parity_t
UART Parity enumeration.
4.1.29.7. Function Documentation
4.1.29.7.1. uart_default_tx_wait_blocking
static void uart_default_tx_wait_blocking (void) [inline], [static]
Wait for the default UART’s TX FIFO to be drained.
4.1.29.7.2. uart_deinit
void uart_deinit (uart_inst_t * uart)
DeInitialise a UART.
Disable the UART if it is no longer used. Must be reinitialised before being used again.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 313

uart
UART instance. uart0 or uart1
4.1.29.7.3. uart_get_dreq_num
static uint uart_get_dreq_num (uart_inst_t * uart, bool is_tx) [inline], [static]
Return the dreq_num_t to use for pacing transfers to/from a particular UART instance.
Parameters
uart
UART instance. uart0 or uart1
is_tx
true for sending data to the UART instance, false for receiving data from the UART instance
4.1.29.7.4. uart_get_hw
static uart_hw_t * uart_get_hw (uart_inst_t * uart) [inline], [static]
Get the real hardware UART instance from a UART instance.
This extra level of abstraction was added to facilitate adding PIO UARTs in the future. It currently does nothing, and
costs nothing.
Parameters
uart
UART instance
Returns
The uart_hw_t pointer to the UART instance registers
4.1.29.7.5. uart_get_index
static uint uart_get_index (uart_inst_t * uart) [inline], [static]
Convert UART instance to hardware instance number.
Parameters
uart
UART instance
Returns
Number of UART, 0 or 1.
4.1.29.7.6. uart_get_instance
static uart_inst_t * uart_get_instance (uint num) [inline], [static]
Get the UART instance from an instance number.
Parameters
uart
UART instance
Returns
Number of UART, 0 or 1
4.1.29.7.7. uart_get_reset_num
static uint uart_get_reset_num (uart_inst_t * uart) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 314

Return the reset_num_t to use for pacing transfers to/from a particular UART instance.
Parameters
uart
UART instance. uart0 or uart1
is_tx
true for sending data to the UART instance, false for receiving data from the UART instance
4.1.29.7.8. uart_getc
static char uart_getc (uart_inst_t * uart) [inline], [static]
Read a single character from the UART.
This function will block until a character has been read
Parameters
uart
UART instance. uart0 or uart1
Returns
The character read.
4.1.29.7.9. uart_init
uint uart_init (uart_inst_t * uart, uint baudrate)
Initialise a UART.
Put the UART into a known state, and enable it. Must be called before other functions.
This function always enables the FIFOs, and configures the UART for the following default line format:
•
8 data bits
•
No parity bit
•
One stop bit
NOTE
There is no guarantee that the baudrate requested will be possible, the nearest will be chosen, and this function will
return the configured baud rate.
Parameters
uart
UART instance. uart0 or uart1
baudrate
Baudrate of UART in Hz
Returns
Actual set baudrate
4.1.29.7.10. uart_is_enabled
static bool uart_is_enabled (uart_inst_t * uart) [inline], [static]
Test if specific UART is enabled.
Parameters
uart
UART instance. uart0 or uart1
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 315

true if the UART is enabled
4.1.29.7.11. uart_is_readable
static bool uart_is_readable (uart_inst_t * uart) [inline], [static]
Determine whether data is waiting in the RX FIFO.
Parameters
uart
UART instance. uart0 or uart1
Returns
true if the RX FIFO is not empty, otherwise false.
4.1.29.7.12. uart_is_readable_within_us
bool uart_is_readable_within_us (uart_inst_t * uart, uint32_t us)
Wait for up to a certain number of microseconds for the RX FIFO to be non empty.
Parameters
uart
UART instance. uart0 or uart1
us
the number of microseconds to wait at most (may be 0 for an instantaneous check)
Returns
true if the RX FIFO became non empty before the timeout, false otherwise
4.1.29.7.13. uart_is_writable
static bool uart_is_writable (uart_inst_t * uart) [inline], [static]
Determine if space is available in the TX FIFO.
Parameters
uart
UART instance. uart0 or uart1
Returns
false if no space available, true otherwise
4.1.29.7.14. uart_putc
static void uart_putc (uart_inst_t * uart, char c) [inline], [static]
Write single character to UART for transmission, with optional CR/LF conversions.
This function will block until the character has been sent to the UART transmit buffer
Parameters
uart
UART instance. uart0 or uart1
c
The character to send
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 316

4.1.29.7.15. uart_putc_raw
static void uart_putc_raw (uart_inst_t * uart, char c) [inline], [static]
Write single character to UART for transmission.
This function will block until the entire character has been sent to the UART transmit buffer
Parameters
uart
UART instance. uart0 or uart1
c
The character to send
4.1.29.7.16. uart_puts
static void uart_puts (uart_inst_t * uart, const char * s) [inline], [static]
Write string to UART for transmission, doing any CR/LF conversions.
This function will block until the entire string has been sent to the UART transmit buffer
Parameters
uart
UART instance. uart0 or uart1
s
The null terminated string to send
4.1.29.7.17. uart_read_blocking
static void uart_read_blocking (uart_inst_t * uart, uint8_t * dst, size_t len) [inline], [static]
Read from the UART.
This function blocks until len characters have been read from the UART
Parameters
uart
UART instance. uart0 or uart1
dst
Buffer to accept received bytes
len
The number of bytes to receive.
4.1.29.7.18. uart_set_baudrate
uint uart_set_baudrate (uart_inst_t * uart, uint baudrate)
Set UART baud rate.
Set baud rate as close as possible to requested, and return actual rate selected.
The UART is paused for around two character periods whilst the settings are changed. Data received during this time
may be dropped by the UART.
Any characters still in the transmit buffer will be sent using the new updated baud rate. uart_tx_wait_blocking() can be
called before this function to ensure all characters at the old baud rate have been sent before the rate is changed.
This function should not be called from an interrupt context, and the UART interrupt should be disabled before calling
this function.
Parameters
uart
UART instance. uart0 or uart1
baudrate
Baudrate in Hz
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 317

Returns
Actual set baudrate
4.1.29.7.19. uart_set_break
void uart_set_break (uart_inst_t * uart, bool en)
Assert a break condition on the UART transmission.
Parameters
uart
UART instance. uart0 or uart1
en
Assert break condition (TX held low) if true. Clear break condition if false.
4.1.29.7.20. uart_set_fifo_enabled
void uart_set_fifo_enabled (uart_inst_t * uart, bool enabled)
Enable/Disable the FIFOs on specified UART.
The UART is paused for around two character periods whilst the settings are changed. Data received during this time
may be dropped by the UART.
Any characters still in the transmit FIFO will be lost if the FIFO is disabled. uart_tx_wait_blocking() can be called before
this function to avoid this.
This function should not be called from an interrupt context, and the UART interrupt should be disabled when calling this
function.
Parameters
uart
UART instance. uart0 or uart1
enabled
true to enable FIFO (default), false to disable
4.1.29.7.21. uart_set_format
void uart_set_format (uart_inst_t * uart, uint data_bits, uint stop_bits, uart_parity_t parity)
Set UART data format.
Configure the data format (bits etc) for the UART.
The UART is paused for around two character periods whilst the settings are changed. Data received during this time
may be dropped by the UART.
Any characters still in the transmit buffer will be sent using the new updated data format. uart_tx_wait_blocking() can be
called before this function to ensure all characters needing the old format have been sent before the format is changed.
This function should not be called from an interrupt context, and the UART interrupt should be disabled before calling
this function.
Parameters
uart
UART instance. uart0 or uart1
data_bits
Number of bits of data. 5..8
stop_bits
Number of stop bits 1..2
parity
Parity option.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 318

4.1.29.7.22. uart_set_hw_flow
static void uart_set_hw_flow (uart_inst_t * uart, bool cts, bool rts) [inline], [static]
Set UART flow control CTS/RTS.
Parameters
uart
UART instance. uart0 or uart1
cts
If true enable flow control of TX by clear-to-send input
rts
If true enable assertion of request-to-send output by RX flow control
4.1.29.7.23. uart_set_irqs_enabled
static void uart_set_irqs_enabled (uart_inst_t * uart, bool rx_has_data, bool tx_needs_data) [inline], [static]
Enable/Disable UART interrupt outputs.
Enable/Disable the UART’s interrupt outputs. An interrupt handler should be installed prior to calling this function.
Parameters
uart
UART instance. uart0 or uart1
rx_has_data
If true an interrupt will be fired when the RX FIFO contains data.
tx_needs_data
If true an interrupt will be fired when the TX FIFO needs data.
4.1.29.7.24. uart_set_translate_crlf
void uart_set_translate_crlf (uart_inst_t * uart, bool translate)
Set CR/LF conversion on UART.
Parameters
uart
UART instance. uart0 or uart1
translate
If true, convert line feeds to carriage return on transmissions
4.1.29.7.25. uart_tx_wait_blocking
static void uart_tx_wait_blocking (uart_inst_t * uart) [inline], [static]
Wait for the UART TX fifo to be drained.
Parameters
uart
UART instance. uart0 or uart1
4.1.29.7.26. uart_write_blocking
static void uart_write_blocking (uart_inst_t * uart, const uint8_t * src, size_t len) [inline], [static]
Write to the UART for transmission.
This function will block until all the data has been sent to the UART transmit buffer hardware. Note: Serial data
transmission will continue until the Tx FIFO and the transmit shift register (not programmer-accessible) are empty. To
ensure the UART FIFO has been emptied, you can use uart_tx_wait_blocking()
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 319

uart
UART instance. uart0 or uart1
src
The bytes to send
len
The number of bytes to send
4.1.30. hardware_vreg
Voltage Regulation API.
4.1.30.1. Functions
void vreg_set_voltage (enum vreg_voltage voltage)
Set voltage.
void vreg_disable_voltage_limit (void)
Enable use of voltages beyond the safe range of operation.
4.1.30.2. Function Documentation
4.1.30.2.1. vreg_disable_voltage_limit
void vreg_disable_voltage_limit (void)
Enable use of voltages beyond the safe range of operation.
This allows voltages beyond VREG_VOLTAGE_MAX to be used, on platforms where they are available (e.g. RP2350).
Attempting to set a higher voltage without first calling this function will result in a voltage of VREG_VOLTAGE_MAX.
4.1.30.2.2. vreg_set_voltage
void vreg_set_voltage (enum vreg_voltage voltage)
Set voltage.
Parameters
voltage
The voltage (from enumeration vreg_voltage) to apply to the voltage regulator
4.1.31. hardware_watchdog
Hardware Watchdog Timer API.
4.1.31.1. Detailed Description
Supporting functions for the Pico hardware watchdog timer.
The RP-series microcontrollers have a built in HW watchdog Timer. This is a countdown timer that can restart parts of
the chip if it reaches zero. For example, this can be used to restart the processor if the software running on it gets stuck
in an infinite loop or similar. The programmer has to periodically write a value to the watchdog to stop it reaching zero.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 320

4.1.31.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/watchdog.h"
Ê4
Ê5 int main() {
Ê6 stdio_init_all();
Ê7
Ê8 if (watchdog_caused_reboot()) {
Ê9 printf("Rebooted by Watchdog!\n");
10 return 0;
11 } else {
12 printf("Clean boot\n");
13 }
14
15 // Enable the watchdog, requiring the watchdog to be updated every 100ms or the chip will
Ê reboot
16 // second arg is pause on debug which means the watchdog will pause when stepping through
Ê code
17 watchdog_enable(100, 1);
18
19 for (uint i = 0; i < 5; i++) {
20 printf("Updating watchdog %d\n", i);
21 watchdog_update();
22 }
23
24 // Wait in an infinite loop and don't update the watchdog so it reboots us
25 printf("Waiting to be rebooted by watchdog\n");
26 while(1);
27 }
4.1.31.2. Functions
void watchdog_reboot (uint32_t pc, uint32_t sp, uint32_t delay_ms)
Define actions to perform at watchdog timeout.
void watchdog_start_tick (uint cycles)
Start the watchdog tick.
void watchdog_update (void)
Reload the watchdog counter with the amount of time set in watchdog_enable.
void watchdog_enable (uint32_t delay_ms, bool pause_on_debug)
Enable the watchdog.
void watchdog_disable (void)
Disable the watchdog.
bool watchdog_caused_reboot (void)
Did the watchdog cause the last reboot?
bool watchdog_enable_caused_reboot (void)
Did watchdog_enable cause the last reboot?
uint32_t watchdog_get_time_remaining_ms (void)
Returns the number of microseconds before the watchdog will reboot the chip.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 321

4.1.31.3. Function Documentation
4.1.31.3.1. watchdog_caused_reboot
bool watchdog_caused_reboot (void)
Did the watchdog cause the last reboot?
Returns
true If the watchdog timer or a watchdog force caused the last reboot
Returns
false If there has been no watchdog reboot since the last power on reset. A power on reset is typically caused by a
power cycle or the run pin (reset button) being toggled.
4.1.31.3.2. watchdog_disable
void watchdog_disable (void)
Disable the watchdog.
4.1.31.3.3. watchdog_enable
void watchdog_enable (uint32_t delay_ms, bool pause_on_debug)
Enable the watchdog.
NOTE
If watchdog_start_tick value does not give a 1MHz clock to the watchdog system, then the delay_ms parameter will
not be in milliseconds. See the datasheet for more details.
By default the SDK assumes a 12MHz XOSC and sets the watchdog_start_tick appropriately.
This method sets a marker in the watchdog scratch register 4 that is checked by watchdog_enable_caused_reboot. If
the device is subsequently reset via a call to watchdog_reboot (including for example by dragging a UF2 onto the RPI-
RP2), then this value will be cleared, and so watchdog_enable_caused_reboot will return false.
Parameters
delay_ms
Number of milliseconds before watchdog will reboot without watchdog_update being called.
Maximum of 8388, which is approximately 8.3 seconds
pause_on_debug
If the watchdog should be paused when the debugger is stepping through code
4.1.31.3.4. watchdog_enable_caused_reboot
bool watchdog_enable_caused_reboot (void)
Did watchdog_enable cause the last reboot?
Perform additional checking along with watchdog_caused_reboot to determine if a watchdog timeout initiated by
watchdog_enable caused the last reboot.
This method checks for a special value in watchdog scratch register 4 placed there by watchdog_enable. This would not
be present if a watchdog reset is initiated by watchdog_reboot or by the RP-series microcontroller bootrom (e.g.
dragging a UF2 onto the RPI-RP2 drive).
Returns
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 322

true If the watchdog timer or a watchdog force caused (see watchdog_caused_reboot) the last reboot and the
watchdog reboot happened after watchdog_enable was called
Returns
false If there has been no watchdog reboot since the last power on reset, or the watchdog reboot was not caused by a
watchdog timeout after watchdog_enable was called. A power on reset is typically caused by a power cycle or the run
pin (reset button) being toggled.
4.1.31.3.5. watchdog_get_time_remaining_ms
uint32_t watchdog_get_time_remaining_ms (void)
Returns the number of microseconds before the watchdog will reboot the chip.
Returns
The number of microseconds before the watchdog will reboot the chip.
4.1.31.3.6. watchdog_reboot
void watchdog_reboot (uint32_t pc, uint32_t sp, uint32_t delay_ms)
Define actions to perform at watchdog timeout.
NOTE
If watchdog_start_tick value does not give a 1MHz clock to the watchdog system, then the delay_ms parameter will
not be in milliseconds. See the datasheet for more details.
By default the SDK assumes a 12MHz XOSC and sets the watchdog_start_tick appropriately.
Parameters
pc
If Zero, a standard boot will be performed, if non-zero this is the program counter to jump to on reset.
sp
If pc is non-zero, this will be the stack pointer used.
delay_ms
Initial load value. Maximum value 8388, approximately 8.3s.
4.1.31.3.7. watchdog_start_tick
void watchdog_start_tick (uint cycles)
Start the watchdog tick.
Parameters
cycles
This needs to be a divider that when applied to the XOSC input, produces a 1MHz clock. So if the XOSC
is 12MHz, this will need to be 12.
4.1.31.3.8. watchdog_update
void watchdog_update (void)
Reload the watchdog counter with the amount of time set in watchdog_enable.
Raspberry Pi Pico-series C/C++ SDK
4.1. Hardware APIs 323

4.1.32. hardware_xosc
Crystal Oscillator (XOSC) API.
4.1.32.1. Functions
void xosc_init (void)
Initialise the crystal oscillator system.
void xosc_disable (void)
Disable the Crystal oscillator.
void xosc_dormant (void)
Set the crystal oscillator system to dormant.
4.1.32.2. Function Documentation
4.1.32.2.1. xosc_disable
void xosc_disable (void)
Disable the Crystal oscillator.
Turns off the crystal oscillator source, and waits for it to become unstable
4.1.32.2.2. xosc_dormant
void xosc_dormant (void)
Set the crystal oscillator system to dormant.
Turns off the crystal oscillator until it is woken by an interrupt. This will block and hence the entire system will stop, until
an interrupt wakes it up. This function will continue to block until the oscillator becomes stable after its wakeup.
4.1.32.2.3. xosc_init
void xosc_init (void)
Initialise the crystal oscillator system.
This function will block until the crystal oscillator has stabilised.
4.2. High Level APIs
This group of libraries provide higher level functionality that isn’t hardware related or provides a richer set of
functionality above the basic hardware interfaces
pico_aon_timer High Level "Always on Timer" Abstraction.
pico_async_context An async_context provides a logically single-threaded context for performing work, and
responding to asynchronous events. Thus an async_context instance is suitable for servicing
third-party libraries that are not re-entrant.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 324

ÊÊÊÊasync_context_freer
tos
async_context_freertos provides an implementation of async_context that handles
asynchronous work in a separate FreeRTOS task.
ÊÊÊÊasync_context_poll async_context_poll provides an implementation of async_context that is intended for use with
a simple polling loop on one core. It is not thread safe.
ÊÊÊÊasync_context_thre
adsafe_background
async_context_threadsafe_background provides an implementation of async_context that
handles asynchronous work in a low priority IRQ, and there is no need for the user to poll for
work
pico_bootsel_via_dou
ble_reset
Optional support to make fast double reset of the system enter BOOTSEL mode.
pico_flash High level flash API.
pico_i2c_slave Functions providing an interrupt driven I2C slave interface.
pico_multicore Adds support for running code on, and interacting with the second processor core (core 1).
ÊÊÊÊfifo Functions for the inter-core FIFOs.
ÊÊÊÊdoorbell Functions related to doorbells which a core can use to raise IRQs on itself or the other core.
ÊÊÊÊlockout Functions to enable one core to force the other core to pause execution in a known state.
pico_rand Random Number Generator API.
pico_sha256 SHA-256 Hardware Accelerated implementation.
pico_stdlib Aggregation of a core subset of Raspberry Pi Pico SDK libraries used by most executables
along with some additional utility methods.
pico_sync Synchronization primitives and mutual exclusion.
ÊÊÊÊcritical_section Critical Section API for short-lived mutual exclusion safe for IRQ and multi-core.
ÊÊÊÊlock_core base synchronization/lock primitive support.
ÊÊÊÊmutex Mutex API for non IRQ mutual exclusion between cores.
ÊÊÊÊsem Semaphore API for restricting access to a resource.
pico_time API for accurate timestamps, sleeping, and time based callbacks.
ÊÊÊÊtimestamp Timestamp functions relating to points in time (including the current time).
ÊÊÊÊsleep Sleep functions for delaying execution in a lower power state.
ÊÊÊÊalarm Alarm functions for scheduling future execution.
ÊÊÊÊrepeating_timer Repeating Timer functions for simple scheduling of repeated execution.
pico_unique_id Unique device ID access API.
pico_util Useful data structures and utility functions.
ÊÊÊÊdatetime Date/Time formatting.
ÊÊÊÊpheap Pairing Heap Implementation.
ÊÊÊÊqueue Multi-core and IRQ safe queue implementation.
4.2.1. pico_aon_timer
High Level "Always on Timer" Abstraction.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 325

4.2.1.1. Detailed Description
This library uses the RTC on RP2040. This library uses the RTC on RP2350.
4.2.1.2. Functions
void aon_timer_start_with_timeofday (void)
Start the AON timer running using the result from the gettimeofday() function as the current time.
void aon_timer_start (const struct timespec *ts)
Start the AON timer running using the specified timespec as the current time.
void aon_timer_stop (void)
Stop the AON timer.
void aon_timer_set_time (const struct timespec *ts)
Update the current time of the AON timer.
void aon_timer_get_time (struct timespec *ts)
Get the current time of the AON timer.
void aon_timer_get_resolution (struct timespec *ts)
Get the resolution of the AON timer.
aon_timer_alarm_handler_t aon_timer_enable_alarm (const struct timespec *ts, aon_timer_alarm_handler_t handler, bool
wakeup_from_low_power)
Enable an AON timer alarm for a specifed time.
void aon_timer_disable_alarm (void)
Disable the currently enabled AON timer alarm if any.
bool aon_timer_is_running (void)
Disable the currently enabled AON timer alarm if any.
4.2.1.3. Function Documentation
4.2.1.3.1. aon_timer_disable_alarm
void aon_timer_disable_alarm (void)
Disable the currently enabled AON timer alarm if any.
4.2.1.3.2. aon_timer_enable_alarm
aon_timer_alarm_handler_t aon_timer_enable_alarm (const struct timespec * ts, aon_timer_alarm_handler_t handler, bool
wakeup_from_low_power)
Enable an AON timer alarm for a specifed time.
On RP2040 The alarm will not fire if it is in the past On RP2040 The alarm will fire if it is in the past
Parameters
ts
the alarm time
handler
a callback to call when the timer fires (may be NULL for wakeup_from_low_power =
true)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 326

wakeup_from_low_power
true if the AON timer is to be used to wake up from a DORMANT state
4.2.1.3.3. aon_timer_get_resolution
void aon_timer_get_resolution (struct timespec * ts)
Get the resolution of the AON timer.
Parameters
ts
out value for the resolution of the AON timer
4.2.1.3.4. aon_timer_get_time
void aon_timer_get_time (struct timespec * ts)
Get the current time of the AON timer.
Parameters
ts
out value for the current time
4.2.1.3.5. aon_timer_is_running
bool aon_timer_is_running (void)
Disable the currently enabled AON timer alarm if any.
Returns
true if the AON timer is running
4.2.1.3.6. aon_timer_set_time
void aon_timer_set_time (const struct timespec * ts)
Update the current time of the AON timer.
Parameters
ts
the new current time
4.2.1.3.7. aon_timer_start
void aon_timer_start (const struct timespec * ts)
Start the AON timer running using the specified timespec as the current time.
Parameters
ts
the current time
4.2.1.3.8. aon_timer_start_with_timeofday
void aon_timer_start_with_timeofday (void)
Start the AON timer running using the result from the gettimeofday() function as the current time.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 327

4.2.1.3.9. aon_timer_stop
void aon_timer_stop (void)
Stop the AON timer.
4.2.2. pico_async_context
An async_context provides a logically single-threaded context for performing work, and responding to asynchronous
events. Thus an async_context instance is suitable for servicing third-party libraries that are not re-entrant.
4.2.2.1. Detailed Description
The "context" in async_context refers to the fact that when calling workers or timeouts within the async_context various
pre-conditions hold:
1. That there is a single logical thread of execution; i.e. that the context does not call any worker functions
concurrently.
2. That the context always calls workers from the same processor core, as most uses of async_context rely on
interaction with IRQs which are themselves core-specific.
THe async_context provides two mechanisms for asynchronous work:
•
when_pending workers, which are processed whenever they have work pending. See
async_context_add_when_pending_worker, async_context_remove_when_pending_worker, and
async_context_set_work_pending, the latter of which can be used from an interrupt handler to signal that servicing
work is required to be performed by the worker from the regular async_context.
•
at_time workers, that are executed after at a specific time.
Note: "when pending" workers with work pending are executed before "at time" workers.
The async_context provides locking mechanisms, see async_context_acquire_lock_blocking,
async_context_release_lock and async_context_lock_check which can be used by external code to ensure execution of
external code does not happen concurrently with worker code. Locked code runs on the calling core, however
async_context_execute_sync is provided to synchronously run a function from the core of the async_context.
The SDK ships with the following default async_contexts:
async_context_poll - this context is not thread-safe, and the user is responsible for calling async_context_poll()
periodically, and can use async_context_wait_for_work_until() to sleep between calls until work is needed if the user has
nothing else to do.
async_context_threadsafe_background - in order to work in the background, a low priority IRQ is used to handle
callbacks. Code is usually invoked from this IRQ context, but may be invoked after any other code that uses the async
context in another (non-IRQ) context on the same core. Calling async_context_poll() is not required, and is a no-op. This
context implements async_context locking and is thus safe to call from either core, according to the specific notes on
each API.
async_context_freertos - Work is performed from a separate "async_context" task, however once again, code may also
be invoked after a direct use of the async_context on the same core that the async_context belongs to. Calling
async_context_poll() is not required, and is a no-op. This context implements async_context locking and is thus safe to
call from any task, and from either core, according to the specific notes on each API.
Each async_context provides bespoke methods of instantiation which are provided in the corresponding headers (e.g.
async_context_poll.h, async_context_threadsafe_background.h, asycn_context_freertos.h). async_contexts are de-
initialized by the common async_context_deint() method.
Multiple async_context instances can be used by a single application, and they will operate independently.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 328

4.2.2.2. Modules
async_context_freertos
async_context_freertos provides an implementation of async_context that handles asynchronous work in a
separate FreeRTOS task.
async_context_poll
async_context_poll provides an implementation of async_context that is intended for use with a simple polling loop
on one core. It is not thread safe.
async_context_threadsafe_background
async_context_threadsafe_background provides an implementation of async_context that handles asynchronous
work in a low priority IRQ, and there is no need for the user to poll for work
4.2.2.3. Typedefs
typedef struct async_work_on_timeout async_at_time_worker_t
A "timeout" instance used by an async_context.
typedef struct async_when_pending_worker async_when_pending_worker_t
A "worker" instance used by an async_context.
typedef struct async_context_type async_context_type_t
Implementation of an async_context type, providing methods common to that type.
4.2.2.4. Functions
static void async_context_acquire_lock_blocking (async_context_t *context)
Acquire the async_context lock.
static void async_context_release_lock (async_context_t *context)
Release the async_context lock.
static void async_context_lock_check (async_context_t *context)
Assert if the caller does not own the lock for the async_context.
static uint32_t async_context_execute_sync (async_context_t *context, uint32_t(*func)(void *param), void *param)
Execute work synchronously on the core the async_context belongs to.
static bool async_context_add_at_time_worker (async_context_t *context, async_at_time_worker_t *worker)
Add an "at time" worker to a context.
static bool async_context_add_at_time_worker_at (async_context_t *context, async_at_time_worker_t *worker,
absolute_time_t at)
Add an "at time" worker to a context.
static bool async_context_add_at_time_worker_in_ms (async_context_t *context, async_at_time_worker_t *worker, uint32_t
ms)
Add an "at time" worker to a context.
static bool async_context_remove_at_time_worker (async_context_t *context, async_at_time_worker_t *worker)
Remove an "at time" worker from a context.
static bool async_context_add_when_pending_worker (async_context_t *context, async_when_pending_worker_t *worker)
Add a "when pending" worker to a context.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 329

static bool async_context_remove_when_pending_worker (async_context_t *context, async_when_pending_worker_t *worker)
Remove a "when pending" worker from a context.
static void async_context_set_work_pending (async_context_t *context, async_when_pending_worker_t *worker)
Mark a "when pending" worker as having work pending.
static void async_context_poll (async_context_t *context)
Perform any pending work for polling style async_context.
static void async_context_wait_until (async_context_t *context, absolute_time_t until)
sleep until the specified time in an async_context callback safe way
static void async_context_wait_for_work_until (async_context_t *context, absolute_time_t until)
Block until work needs to be done or the specified time has been reached.
static void async_context_wait_for_work_ms (async_context_t *context, uint32_t ms)
Block until work needs to be done or the specified number of milliseconds have passed.
static uint async_context_core_num (const async_context_t *context)
Return the processor core this async_context belongs to.
static void async_context_deinit (async_context_t *context)
End async_context processing, and free any resources.
4.2.2.5. Typedef Documentation
4.2.2.5.1. async_at_time_worker_t
typedef struct async_work_on_timeout async_at_time_worker_t
A "timeout" instance used by an async_context.
A "timeout" represents some future action that must be taken at a specific time. Its methods are called from the
async_context under lock at the given time
See also
async_context_add_worker_at
async_context_add_worker_in_ms
4.2.2.5.2. async_when_pending_worker_t
typedef struct async_when_pending_worker async_when_pending_worker_t
A "worker" instance used by an async_context.
A "worker" represents some external entity that must do work in response to some external stimulus (usually an IRQ).
Its methods are called from the async_context under lock at the given time
See also
async_context_add_worker_at
async_context_add_worker_in_ms
4.2.2.5.3. async_context_type_t
typedef struct async_context_type async_context_type_t
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 330

Implementation of an async_context type, providing methods common to that type.
4.2.2.6. Function Documentation
4.2.2.6.1. async_context_acquire_lock_blocking
static void async_context_acquire_lock_blocking (async_context_t * context) [inline], [static]
Acquire the async_context lock.
The owner of the async_context lock is the logic owner of the async_context and other work related to this
async_context will not happen concurrently.
This method may be called in a nested fashion by the the lock owner.
NOTE
the async_context lock is nestable by the same caller, so an internal count is maintained
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
See also
async_context_release_lock
4.2.2.6.2. async_context_add_at_time_worker
static bool async_context_add_at_time_worker (async_context_t * context, async_at_time_worker_t * worker) [inline],
[static]
Add an "at time" worker to a context.
An "at time" worker will run at or after a specific point in time, and is automatically when (just before) it runs.
The time to fire is specified in the next_time field of the worker.
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "at time" worker to add
Returns
true if the worker was added, false if the worker was already present.
4.2.2.6.3. async_context_add_at_time_worker_at
static bool async_context_add_at_time_worker_at (async_context_t * context, async_at_time_worker_t * worker,
absolute_time_t at) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 331

Add an "at time" worker to a context.
An "at time" worker will run at or after a specific point in time, and is automatically when (just before) it runs.
The time to fire is specified by the at parameter.
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "at time" worker to add
at
the time to fire at
Returns
true if the worker was added, false if the worker was already present.
4.2.2.6.4. async_context_add_at_time_worker_in_ms
static bool async_context_add_at_time_worker_in_ms (async_context_t * context, async_at_time_worker_t * worker, uint32_t
ms) [inline], [static]
Add an "at time" worker to a context.
An "at time" worker will run at or after a specific point in time, and is automatically when (just before) it runs.
The time to fire is specified by a delay via the ms parameter
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "at time" worker to add
ms
the number of milliseconds from now to fire after
Returns
true if the worker was added, false if the worker was already present.
4.2.2.6.5. async_context_add_when_pending_worker
static bool async_context_add_when_pending_worker (async_context_t * context, async_when_pending_worker_t * worker)
[inline], [static]
Add a "when pending" worker to a context.
An "when pending" worker will run when it is pending (can be set via async_context_set_work_pending), and is NOT
automatically removed when it runs.
The time to fire is specified by a delay via the ms parameter
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 332

NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "when pending" worker to add
Returns
true if the worker was added, false if the worker was already present.
4.2.2.6.6. async_context_core_num
static uint async_context_core_num (const async_context_t * context) [inline], [static]
Return the processor core this async_context belongs to.
Parameters
context
the async_context
Returns
the physical core number
4.2.2.6.7. async_context_deinit
static void async_context_deinit (async_context_t * context) [inline], [static]
End async_context processing, and free any resources.
Note the user should clean up any resources associated with workers in the async_context themselves.
Asynchronous (non-polled) async_contexts guarantee that no callback is being called once this method returns.
Parameters
context
the async_context
4.2.2.6.8. async_context_execute_sync
static uint32_t async_context_execute_sync (async_context_t * context, uint32_t(*)(void *param) func, void * param)
[inline], [static]
Execute work synchronously on the core the async_context belongs to.
This method is intended for code external to the async_context (e.g. another thread/task) to execute a function with the
same guarantees (single core, logical thread of execution) that async_context workers are called with.
NOTE
you should NOT call this method while holding the async_context's lock
Parameters
context
the async_context
func
the function to call
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 333

param
the parameter to pass to the function
Returns
the return value from func
4.2.2.6.9. async_context_lock_check
static void async_context_lock_check (async_context_t * context) [inline], [static]
Assert if the caller does not own the lock for the async_context.
NOTE
this method is thread-safe
Parameters
context
the async_context
4.2.2.6.10. async_context_poll
static void async_context_poll (async_context_t * context) [inline], [static]
Perform any pending work for polling style async_context.
For a polled async_context (e.g. async_context_poll) the user is responsible for calling this method periodically to
perform any required work.
This method may immediately perform outstanding work on other context types, but is not required to.
Parameters
context
the async_context
4.2.2.6.11. async_context_release_lock
static void async_context_release_lock (async_context_t * context) [inline], [static]
Release the async_context lock.
NOTE
the async_context lock may be called in a nested fashion, so an internal count is maintained. On the outermost
release, When the outermost lock is released, a check is made for work which might have been skipped while the
lock was held, and any such work may be performed during this call IF the call is made from the same core that the
async_context belongs to.
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
See also
async_context_acquire_lock_blocking
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 334

4.2.2.6.12. async_context_remove_at_time_worker
static bool async_context_remove_at_time_worker (async_context_t * context, async_at_time_worker_t * worker) [inline],
[static]
Remove an "at time" worker from a context.
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "at time" worker to remove
Returns
true if the worker was removed, false if the instance not present.
4.2.2.6.13. async_context_remove_when_pending_worker
static bool async_context_remove_when_pending_worker (async_context_t * context, async_when_pending_worker_t * worker)
[inline], [static]
Remove a "when pending" worker from a context.
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
worker
the "when pending" worker to remove
Returns
true if the worker was removed, false if the instance not present.
4.2.2.6.14. async_context_set_work_pending
static void async_context_set_work_pending (async_context_t * context, async_when_pending_worker_t * worker) [inline],
[static]
Mark a "when pending" worker as having work pending.
The worker will be run from the async_context at a later time.
NOTE
this method may be called from any context including IRQs
Parameters
context
the async_context
worker
the "when pending" worker to mark as pending.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 335

4.2.2.6.15. async_context_wait_for_work_ms
static void async_context_wait_for_work_ms (async_context_t * context, uint32_t ms) [inline], [static]
Block until work needs to be done or the specified number of milliseconds have passed.
NOTE
this method should not be called from a worker callback
Parameters
context
the async_context
ms
the number of milliseconds to return after if no work is required
4.2.2.6.16. async_context_wait_for_work_until
static void async_context_wait_for_work_until (async_context_t * context, absolute_time_t until) [inline], [static]
Block until work needs to be done or the specified time has been reached.
NOTE
this method should not be called from a worker callback
Parameters
context
the async_context
until
the time to return at if no work is required
4.2.2.6.17. async_context_wait_until
static void async_context_wait_until (async_context_t * context, absolute_time_t until) [inline], [static]
sleep until the specified time in an async_context callback safe way
NOTE
for async_contexts that provide locking (not async_context_poll), this method is threadsafe. and may be called from
within any worker method called by the async_context or from any other non-IRQ context.
Parameters
context
the async_context
until
the time to sleep until
4.2.2.7. async_context_freertos
async_context_freertos provides an implementation of async_context that handles asynchronous work in a separate
FreeRTOS task.
4.2.2.7.1. Functions
bool async_context_freertos_init (async_context_freertos_t *self, async_context_freertos_config_t *config)
Initialize an async_context_freertos instance using the specified configuration.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 336

static async_context_freertos_config_t async_context_freertos_default_config (void)
Return a copy of the default configuration object used by async_context_freertos_init_with_defaults()
static bool async_context_freertos_init_with_defaults (async_context_freertos_t *self)
Initialize an async_context_freertos instance with default values.
4.2.2.7.2. Function Documentation
async_context_freertos_default_config
static async_context_freertos_config_t async_context_freertos_default_config (void) [inline], [static]
Return a copy of the default configuration object used by async_context_freertos_init_with_defaults()
The caller can then modify just the settings it cares about, and call async_context_freertos_init()
Returns
the default configuration object
async_context_freertos_init
bool async_context_freertos_init (async_context_freertos_t * self, async_context_freertos_config_t * config)
Initialize an async_context_freertos instance using the specified configuration.
If this method succeeds (returns true), then the async_context is available for use and can be de-initialized by calling
async_context_deinit().
Parameters
self
a pointer to async_context_freertos structure to initialize
config
the configuration object specifying characteristics for the async_context
Returns
true if initialization is successful, false otherwise
async_context_freertos_init_with_defaults
static bool async_context_freertos_init_with_defaults (async_context_freertos_t * self) [inline], [static]
Initialize an async_context_freertos instance with default values.
If this method succeeds (returns true), then the async_context is available for use and can be de-initialized by calling
async_context_deinit().
Parameters
self
a pointer to async_context_freertos structure to initialize
Returns
true if initialization is successful, false otherwise
4.2.2.8. async_context_poll
async_context_poll provides an implementation of async_context that is intended for use with a simple polling loop on
one core. It is not thread safe.
4.2.2.8.1. Detailed Description
The async_context_poll() method must be called periodically to handle asynchronous work that may now be pending.
async_context_wait_for_work_until() may be used to block a polling loop until there is work to do, and prevent tight
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 337

spinning.
4.2.2.8.2. Functions
bool async_context_poll_init_with_defaults (async_context_poll_t *self)
Initialize an async_context_poll instance with default values.
4.2.2.8.3. Function Documentation
async_context_poll_init_with_defaults
bool async_context_poll_init_with_defaults (async_context_poll_t * self)
Initialize an async_context_poll instance with default values.
If this method succeeds (returns true), then the async_context is available for use and can be de-initialized by calling
async_context_deinit().
Parameters
self
a pointer to async_context_poll structure to initialize
Returns
true if initialization is successful, false otherwise
4.2.2.9. async_context_threadsafe_background
async_context_threadsafe_background provides an implementation of async_context that handles asynchronous work
in a low priority IRQ, and there is no need for the user to poll for work
4.2.2.9.1. Detailed Description
NOTE
The workers used with this async_context MUST be safe to call from an IRQ.
4.2.2.9.2. Functions
bool async_context_threadsafe_background_init (async_context_threadsafe_background_t *self,
async_context_threadsafe_background_config_t *config)
Initialize an async_context_threadsafe_background instance using the specified configuration.
async_context_threadsafe_background_config_t async_context_threadsafe_background_default_config (void)
Return a copy of the default configuration object used by
async_context_threadsafe_background_init_with_defaults()
static bool async_context_threadsafe_background_init_with_defaults (async_context_threadsafe_background_t *self)
Initialize an async_context_threadsafe_background instance with default values.
4.2.2.9.3. Function Documentation
async_context_threadsafe_background_default_config
async_context_threadsafe_background_config_t async_context_threadsafe_background_default_config (void)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 338

Return a copy of the default configuration object used by async_context_threadsafe_background_init_with_defaults()
The caller can then modify just the settings it cares about, and call async_context_threadsafe_background_init()
Returns
the default configuration object
async_context_threadsafe_background_init
bool async_context_threadsafe_background_init (async_context_threadsafe_background_t * self,
async_context_threadsafe_background_config_t * config)
Initialize an async_context_threadsafe_background instance using the specified configuration.
If this method succeeds (returns true), then the async_context is available for use and can be de-initialized by calling
async_context_deinit().
Parameters
self
a pointer to async_context_threadsafe_background structure to initialize
config
the configuration object specifying characteristics for the async_context
Returns
true if initialization is successful, false otherwise
async_context_threadsafe_background_init_with_defaults
static bool async_context_threadsafe_background_init_with_defaults (async_context_threadsafe_background_t * self)
[inline], [static]
Initialize an async_context_threadsafe_background instance with default values.
If this method succeeds (returns true), then the async_context is available for use and can be de-initialized by calling
async_context_deinit().
Parameters
self
a pointer to async_context_threadsafe_background structure to initialize
Returns
true if initialization is successful, false otherwise
4.2.3. pico_bootsel_via_double_reset
Optional support to make fast double reset of the system enter BOOTSEL mode.
4.2.3.1. Detailed Description
When the 'pico_bootsel_via_double_reset' library is linked, a function is injected before main() which will detect when the
system has been reset twice in quick succession, and enter the USB ROM bootloader (BOOTSEL mode) when this
happens. This allows a double tap of a reset button on a development board to be used to enter the ROM bootloader,
provided this library is always linked.
4.2.4. pico_flash
High level flash API.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 339

4.2.4.1. Detailed Description
Flash cannot be erased or written to when in XIP mode. However the system cannot directly access memory in the flash
address space when not in XIP mode.
It is therefore critical that no code or data is being read from flash while flash is been written or erased.
If only one core is being used, then the problem is simple - just disable interrupts; however if code is running on the
other core, then it has to be asked, nicely, to avoid flash for a bit. This is hard to do if you don’t have complete control of
the code running on that core at all times.
This library provides a flash_safe_execute method which calls a function back having successfully gotten into a state
where interrupts are disabled, and the other core is not executing or reading from flash.
How it does this is dependent on the supported environment (Free RTOS SMP or pico_multicore). Additionally the user
can provide their own mechanism by providing a strong definition of get_flash_safety_helper().
Using the default settings, flash_safe_execute will only call the callback function if the state is safe otherwise returning
an error (or an assert depending on PICO_FLASH_ASSERT_ON_UNSAFE).
There are conditions where safety would not be guaranteed:
1. FreeRTOS smp with configNUM_CORES=1 - FreeRTOS still uses pico_multicore in this case, so flash_safe_execute
cannot know what the other core is doing, and there is no way to force code execution between a FreeRTOS core
and a non FreeRTOS core.
2. FreeRTOS non SMP with pico_multicore - Again, there is no way to force code execution between a FreeRTOS core
and a non FreeRTOS core.
3. pico_multicore without flash_safe_execute_core_init() having been called on the other core - The
flash_safe_execute method does not know if code is executing on the other core, so it has to assume it is. Either
way, it is not able to intervene if flash_safe_execute_core_init() has not been called on the other core.
Fortunately, all is not lost in this situation, you may:
•
Set PICO_FLASH_ASSUME_CORE0_SAFE=1 to explicitly say that core 0 is never using flash.
•
Set PICO_FLASH_ASSUME_CORE1_SAFE=1 to explicitly say that core 1 is never using flash.
4.2.4.2. Functions
bool flash_safe_execute_core_init (void)
Initialize a core such that the other core can lock it out during flash_safe_execute.
bool flash_safe_execute_core_deinit (void)
De-initialize work done by flash_safe_execute_core_init.
int flash_safe_execute (void(*func)(void *), void *param, uint32_t enter_exit_timeout_ms)
Execute a function with IRQs disabled and with the other core also not executing/reading flash.
flash_safety_helper_t * get_flash_safety_helper (void)
Internal method to return the flash safety helper implementation.
4.2.4.3. Function Documentation
4.2.4.3.1. flash_safe_execute
int flash_safe_execute (void(*)(void *) func, void * param, uint32_t enter_exit_timeout_ms)
Execute a function with IRQs disabled and with the other core also not executing/reading flash.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 340

func
the function to call
param
the parameter to pass to the function
enter_exit_timeout_ms
the timeout for each of the enter/exit phases when coordinating with the other core
Returns
PICO_OK on success (the function will have been called). PICO_ERROR_TIMEOUT on timeout (the function may have
been called). PICO_ERROR_NOT_PERMITTED if safe execution is not possible (the function will not have been called).
PICO_ERROR_INSUFFICIENT_RESOURCES if the method fails due to dynamic resource exhaustion (the function will not
have been called)
NOTE
if PICO_FLASH_ASSERT_ON_UNSAFE is 1, this function will assert in debug mode vs returning
PICO_ERROR_NOT_PERMITTED
4.2.4.3.2. flash_safe_execute_core_deinit
bool flash_safe_execute_core_deinit (void)
De-initialize work done by flash_safe_execute_core_init.
Returns
true on success
4.2.4.3.3. flash_safe_execute_core_init
bool flash_safe_execute_core_init (void)
Initialize a core such that the other core can lock it out during flash_safe_execute.
NOTE
This is not necessary for FreeRTOS SMP, but should be used when launching via multicore_launch_core1
Returns
true on success; there is no need to call flash_safe_execute_core_deinit() on failure.
4.2.4.3.4. get_flash_safety_helper
flash_safety_helper_t * get_flash_safety_helper (void)
Internal method to return the flash safety helper implementation.
Advanced users can provide their own implementation of this function to perform different inter-core coordination
before disabling XIP mode.
Returns
the flash_safety_helper_t
4.2.5. pico_i2c_slave
Functions providing an interrupt driven I2C slave interface.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 341

4.2.5.1. Detailed Description
This I2C slave helper library configures slave mode and hooks the relevant I2C IRQ so that a user supplied handler is
called with enumerated I2C events.
An example application slave_mem_i2c, which makes use of this library, can be found in pico_examples.
4.2.5.2. Typedefs
typedef enum i2c_slave_event_t i2c_slave_event_t
I2C slave event types.
typedef void(* i2c_slave_handler_t)(i2c_inst_t *i2c, i2c_slave_event_t event)
I2C slave event handler.
4.2.5.3. Enumerations
enum i2c_slave_event_t { I2C_SLAVE_RECEIVE, I2C_SLAVE_REQUEST, I2C_SLAVE_FINISH }
I2C slave event types.
4.2.5.4. Functions
void i2c_slave_init (i2c_inst_t *i2c, uint8_t address, i2c_slave_handler_t handler)
Configure an I2C instance for slave mode.
void i2c_slave_deinit (i2c_inst_t *i2c)
Restore an I2C instance to master mode.
4.2.5.5. Typedef Documentation
4.2.5.5.1. i2c_slave_event_t
typedef enum i2c_slave_event_t i2c_slave_event_t
I2C slave event types.
4.2.5.5.2. i2c_slave_handler_t
typedef void(* i2c_slave_handler_t) (i2c_inst_t *i2c, i2c_slave_event_t event)
I2C slave event handler.
The event handler will run from the I2C ISR, so it should return quickly (under 25 us at 400 kb/s). Avoid blocking inside
the handler and split large data transfers across multiple calls for best results. When sending data to master, up to
i2c_get_write_available() bytes can be written without blocking. When receiving data from master, up to
i2c_get_read_available() bytes can be read without blocking.
Parameters
i2c
Either i2c0 or i2c1
event
Event type.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 342

4.2.5.6. Enumeration Type Documentation
4.2.5.6.1. i2c_slave_event_t
enum i2c_slave_event_t
I2C slave event types.
Table 31. Enumerator
I2C_SLAVE_RECEIVE
Data from master is available for reading. Slave must read
from Rx FIFO.
I2C_SLAVE_REQUEST
Master is requesting data. Slave must write into Tx FIFO.
I2C_SLAVE_FINISH
Master has sent a Stop or Restart signal. Slave may
prepare for the next transfer.
4.2.5.7. Function Documentation
4.2.5.7.1. i2c_slave_deinit
void i2c_slave_deinit (i2c_inst_t * i2c)
Restore an I2C instance to master mode.
Parameters
i2c
Either i2c0 or i2c1
4.2.5.7.2. i2c_slave_init
void i2c_slave_init (i2c_inst_t * i2c, uint8_t address, i2c_slave_handler_t handler)
Configure an I2C instance for slave mode.
Parameters
i2c
I2C instance.
address
7-bit slave address.
handler
Callback for events from I2C master. It will run from the I2C ISR, on the CPU core where the slave was
initialised.
4.2.6. pico_multicore
Adds support for running code on, and interacting with the second processor core (core 1).
4.2.6.1. Detailed Description
4.2.6.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "pico/multicore.h"
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 343

Ê4
Ê5 #define FLAG_VALUE 123
Ê6
Ê7 void core1_entry() {
Ê8
Ê9 multicore_fifo_push_blocking(FLAG_VALUE);
10
11 uint32_t g = multicore_fifo_pop_blocking();
12
13 if (g != FLAG_VALUE)
14 printf("Hmm, that's not right on core 1!\n");
15 else
16 printf("Its all gone well on core 1!");
17
18 while (1)
19 tight_loop_contents();
20 }
21
22 int main() {
23 stdio_init_all();
24 printf("Hello, multicore!\n");
25
26
27 multicore_launch_core1(core1_entry);
28
29 // Wait for it to start up
30
31 uint32_t g = multicore_fifo_pop_blocking();
32
33 if (g != FLAG_VALUE)
34 printf("Hmm, that's not right on core 0!\n");
35 else {
36 multicore_fifo_push_blocking(FLAG_VALUE);
37 printf("It's all gone well on core 0!");
38 }
39
40 }
4.2.6.2. Modules
fifo
Functions for the inter-core FIFOs.
doorbell
Functions related to doorbells which a core can use to raise IRQs on itself or the other core.
lockout
Functions to enable one core to force the other core to pause execution in a known state.
4.2.6.3. Macros
•
#define SIO_FIFO_IRQ_NUM(core)
4.2.6.4. Functions
void multicore_reset_core1 (void)
Reset core 1.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 344

void multicore_launch_core1 (void(*entry)(void))
Run code on core 1.
void multicore_launch_core1_with_stack (void(*entry)(void), uint32_t *stack_bottom, size_t stack_size_bytes)
Launch code on core 1 with stack.
void multicore_launch_core1_raw (void(*entry)(void), uint32_t *sp, uint32_t vector_table)
Launch code on core 1 with no stack protection.
4.2.6.5. Macro Definition Documentation
4.2.6.5.1. SIO_FIFO_IRQ_NUM
#define SIO_FIFO_IRQ_NUM(core)
Returns the irq_num_t for the FIFO IRQ on the given core.
On RP2040 each core has a different IRQ number: SIO_IRQ_PROC0 and SIO_IRQ_PROC1. On RP2350 both cores share the
same irq number (SIO_IRQ_PROC) just with a different SIO interrupt output routed to that IRQ input on each core.
Note this macro is intended to resolve at compile time, and does no parameter checking
4.2.6.6. Function Documentation
4.2.6.6.1. multicore_launch_core1
void multicore_launch_core1 (void(*)(void) entry)
Run code on core 1.
Wake up (a previously reset) core 1 and enter the given function on core 1 using the default core 1 stack (below core 0
stack).
core 1 must previously have been reset either as a result of a system reset or by calling multicore_reset_core1
core 1 will use the same vector table as core 0
Parameters
entry
Function entry point
See also
multicore_reset_core1
4.2.6.6.2. multicore_launch_core1_raw
void multicore_launch_core1_raw (void(*)(void) entry, uint32_t * sp, uint32_t vector_table)
Launch code on core 1 with no stack protection.
Wake up (a previously reset) core 1 and start it executing with a specific entry point, stack pointer and vector table.
This is a low level function that does not provide a stack guard even if USE_STACK_GUARDS is defined
core 1 must previously have been reset either as a result of a system reset or by calling multicore_reset_core1
Parameters
entry
Function entry point
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 345

sp
Pointer to the top of the core 1 stack
vector_table
address of the vector table to use for core 1
See also
multicore_reset_core1
4.2.6.6.3. multicore_launch_core1_with_stack
void multicore_launch_core1_with_stack (void(*)(void) entry, uint32_t * stack_bottom, size_t stack_size_bytes)
Launch code on core 1 with stack.
Wake up (a previously reset) core 1 and enter the given function on core 1 using the passed stack for core 1
core 1 must previously have been reset either as a result of a system reset or by calling multicore_reset_core1
core 1 will use the same vector table as core 0
Parameters
entry
Function entry point
stack_bottom
The bottom (lowest address) of the stack
stack_size_bytes
The size of the stack in bytes (must be a multiple of 4)
See also
multicore_reset_core1
4.2.6.6.4. multicore_reset_core1
void multicore_reset_core1 (void)
Reset core 1.
This function can be used to reset core 1 into its initial state (ready for launching code against via
multicore_launch_core1 and similar methods)
NOTE
this function should only be called from core 0
4.2.6.7. fifo
Functions for the inter-core FIFOs.
4.2.6.7.1. Detailed Description
RP-series microcontrollers contains two FIFOs for passing data, messages or ordered events between the two cores.
Each FIFO is 32 bits wide, and 8 entries deep on the RP2040, and 4 entries deep on the RP2350. One of the FIFOs can
only be written by core 0, and read by core 1. The other can only be written by core 1, and read by core 0.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 346

NOTE
The inter-core FIFOs are a very precious resource and are frequently used for SDK functionality (e.g. during core 1
launch or by the lockout functions). Additionally they are often required for the exclusive use of an RTOS (e.g.
FreeRTOS SMP). For these reasons it is suggested that you do not use the FIFO for your own purposes unless none
of the above concerns apply; the majority of cases for transferring data between cores can be eqaully well handled
by using a queue
4.2.6.7.2. Functions
static bool multicore_fifo_rvalid (void)
Check the read FIFO to see if there is data available (sent by the other core)
static bool multicore_fifo_wready (void)
Check the write FIFO to see if it has space for more data.
void multicore_fifo_push_blocking (uint32_t data)
Push data on to the write FIFO (data to the other core).
static void multicore_fifo_push_blocking_inline (uint32_t data)
Push data on to the write FIFO (data to the other core).
bool multicore_fifo_push_timeout_us (uint32_t data, uint64_t timeout_us)
Push data on to the write FIFO (data to the other core) with timeout.
uint32_t multicore_fifo_pop_blocking (void)
Pop data from the read FIFO (data from the other core).
static uint32_t multicore_fifo_pop_blocking_inline (void)
Pop data from the read FIFO (data from the other core).
bool multicore_fifo_pop_timeout_us (uint64_t timeout_us, uint32_t *out)
Pop data from the read FIFO (data from the other core) with timeout.
static void multicore_fifo_drain (void)
Discard any data in the read FIFO.
static void multicore_fifo_clear_irq (void)
Clear FIFO interrupt.
static uint32_t multicore_fifo_get_status (void)
Get FIFO statuses.
4.2.6.7.3. Function Documentation
multicore_fifo_clear_irq
static void multicore_fifo_clear_irq (void) [inline], [static]
Clear FIFO interrupt.
Note that this only clears an interrupt that was caused by the ROE or WOF flags. To clear the VLD flag you need to use
one of the 'pop' or 'drain' functions.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
See also
multicore_fifo_get_status
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 347

multicore_fifo_drain
static void multicore_fifo_drain (void) [inline], [static]
Discard any data in the read FIFO.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
multicore_fifo_get_status
static uint32_t multicore_fifo_get_status (void) [inline], [static]
Get FIFO statuses.
Returns
The statuses as a bitfield
Bit Description
3 Sticky flag indicating the RX FIFO was read when empty
(ROE). This read was ignored by the FIFO.
2 Sticky flag indicating the TX FIFO was written when full
(WOF). This write was ignored by the FIFO.
1 Value is 1 if this core’s TX FIFO is not full (i.e. if FIFO_WR
is ready for more data)
0 Value is 1 if this core’s RX FIFO is not empty (i.e. if
FIFO_RD is valid)
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
multicore_fifo_pop_blocking
uint32_t multicore_fifo_pop_blocking (void)
Pop data from the read FIFO (data from the other core).
This function will block until there is data ready to be read Use multicore_fifo_rvalid() to check if data is ready to be read
if you don’t want to block.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Returns
32 bit data from the read FIFO.
multicore_fifo_pop_blocking_inline
static uint32_t multicore_fifo_pop_blocking_inline (void) [inline], [static]
Pop data from the read FIFO (data from the other core).
This function will block until there is data ready to be read Use multicore_fifo_rvalid() to check if data is ready to be read
if you don’t want to block.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Returns
32 bit data from the read FIFO.
multicore_fifo_pop_timeout_us
bool multicore_fifo_pop_timeout_us (uint64_t timeout_us, uint32_t * out)
Pop data from the read FIFO (data from the other core) with timeout.
This function will block until there is data ready to be read or the timeout is reached
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 348

See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Parameters
timeout_us
the timeout in microseconds
out
the location to store the popped data if available
Returns
true if the data was popped and a value copied into out, false if the timeout occurred before data could be popped
multicore_fifo_push_blocking
void multicore_fifo_push_blocking (uint32_t data)
Push data on to the write FIFO (data to the other core).
This function will block until there is space for the data to be sent. Use multicore_fifo_wready() to check if it is possible
to write to the FIFO if you don’t want to block.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Parameters
data
A 32 bit value to push on to the FIFO
multicore_fifo_push_blocking_inline
static void multicore_fifo_push_blocking_inline (uint32_t data) [inline], [static]
Push data on to the write FIFO (data to the other core).
This function will block until there is space for the data to be sent. Use multicore_fifo_wready() to check if it is possible
to write to the FIFO if you don’t want to block.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Parameters
data
A 32 bit value to push on to the FIFO
multicore_fifo_push_timeout_us
bool multicore_fifo_push_timeout_us (uint32_t data, uint64_t timeout_us)
Push data on to the write FIFO (data to the other core) with timeout.
This function will block until there is space for the data to be sent or the timeout is reached
Parameters
data
A 32 bit value to push on to the FIFO
timeout_us
the timeout in microseconds
Returns
true if the data was pushed, false if the timeout occurred before data could be pushed
multicore_fifo_rvalid
static bool multicore_fifo_rvalid (void) [inline], [static]
Check the read FIFO to see if there is data available (sent by the other core)
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Returns
true if the FIFO has data in it, false otherwise
multicore_fifo_wready
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 349

static bool multicore_fifo_wready (void) [inline], [static]
Check the write FIFO to see if it has space for more data.
See the note in the fifo section for considerations regarding use of the inter-core FIFOs
Returns
true if the FIFO has room for more data, false otherwise
4.2.6.8. doorbell
Functions related to doorbells which a core can use to raise IRQs on itself or the other core.
4.2.6.8.1. Macros
•
#define DOORBELL_IRQ_NUM(doorbell_num)
4.2.6.8.2. Functions
void multicore_doorbell_claim (uint doorbell_num, uint core_mask)
Cooperatively claim the use of this hardware alarm_num.
int multicore_doorbell_claim_unused (uint core_mask, bool required)
Cooperatively claim the use of this hardware alarm_num.
void multicore_doorbell_unclaim (uint doorbell_num, uint core_mask)
Cooperatively release the claim on use of this hardware alarm_num.
static void multicore_doorbell_set_other_core (uint doorbell_num)
Activate the given doorbell on the other core.
static void multicore_doorbell_clear_other_core (uint doorbell_num)
Deactivate the given doorbell on the other core.
static void multicore_doorbell_set_current_core (uint doorbell_num)
Activate the given doorbell on this core.
static void multicore_doorbell_clear_current_core (uint doorbell_num)
Deactivate the given doorbell on this core.
static bool multicore_doorbell_is_set_current_core (uint doorbell_num)
Determine if the given doorbell is active on the other core.
static bool multicore_doorbell_is_set_other_core (uint doorbell_num)
Determine if the given doorbell is active on the this core.
4.2.6.8.3. Macro Definition Documentation
DOORBELL_IRQ_NUM
#define DOORBELL_IRQ_NUM(doorbell_num)
Returns the irq_num_t for processor interrupts for the given doorbell number.
Note this macro is intended to resolve at compile time, and does no parameter checking
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 350

4.2.6.8.4. Function Documentation
multicore_doorbell_claim
void multicore_doorbell_claim (uint doorbell_num, uint core_mask)
Cooperatively claim the use of this hardware alarm_num.
This method hard asserts if the hardware alarm is currently claimed.
Parameters
doorbell_num
the doorbell number to claim
core_mask
0b01: core 0, 0b10: core 1, 0b11 both core 0 and core 1
See also
hardware_claiming
multicore_doorbell_claim_unused
int multicore_doorbell_claim_unused (uint core_mask, bool required)
Cooperatively claim the use of this hardware alarm_num.
This method attempts to claim an unused hardware alarm
Parameters
core_mask
0b01: core 0, 0b10: core 1, 0b11 both core 0 and core 1
required
if true the function will panic if none are available
Returns
the doorbell number claimed or -1 if required was false, and none are available
See also
hardware_claiming
multicore_doorbell_clear_current_core
static void multicore_doorbell_clear_current_core (uint doorbell_num) [inline], [static]
Deactivate the given doorbell on this core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_clear_other_core
static void multicore_doorbell_clear_other_core (uint doorbell_num) [inline], [static]
Deactivate the given doorbell on the other core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_is_set_current_core
static bool multicore_doorbell_is_set_current_core (uint doorbell_num) [inline], [static]
Determine if the given doorbell is active on the other core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_is_set_other_core
static bool multicore_doorbell_is_set_other_core (uint doorbell_num) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 351

Determine if the given doorbell is active on the this core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_set_current_core
static void multicore_doorbell_set_current_core (uint doorbell_num) [inline], [static]
Activate the given doorbell on this core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_set_other_core
static void multicore_doorbell_set_other_core (uint doorbell_num) [inline], [static]
Activate the given doorbell on the other core.
Parameters
doorbell_num
the doorbell number
multicore_doorbell_unclaim
void multicore_doorbell_unclaim (uint doorbell_num, uint core_mask)
Cooperatively release the claim on use of this hardware alarm_num.
Parameters
doorbell_num
the doorbell number to unclaim
core_mask
0b01: core 0, 0b10: core 1, 0b11 both core 0 and core 1
See also
hardware_claiming
4.2.6.9. lockout
Functions to enable one core to force the other core to pause execution in a known state.
4.2.6.9.1. Detailed Description
Sometimes it is useful to enter a critical section on both cores at once. On a single core system a critical section can
trivially be entered by disabling interrupts, however on a multi-core system that is not sufficient, and unless the other
core is polling in some way, then it will need to be interrupted in order to cooperatively enter a blocked state.
These "lockout" functions use the inter core FIFOs to cause an interrupt on one core from the other, and manage waiting
for the other core to enter the "locked out" state.
The usage is that the "victim" core … i.e the core that can be "locked out" by the other core calls
multicore_lockout_victim_init to hook the FIFO interrupt. Note that either or both cores may do this.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 352

NOTE
When "locked out" the victim core is paused (it is actually executing a tight loop with code in RAM) and has
interrupts disabled. This makes the lockout functions suitable for use by code that wants to write to flash (at which
point no code may be executing from flash)
The core which wishes to lockout the other core calls multicore_lockout_start_blocking or
multicore_lockout_start_timeout_us to interrupt the other "victim" core and wait for it to be in a "locked out" state. Once
the lockout is no longer needed it calls multicore_lockout_end_blocking or multicore_lockout_end_timeout_us to release
the lockout and wait for confirmation.
NOTE
Because multicore lockout uses the intercore FIFOs, the FIFOs cannot be used for any other purpose
4.2.6.9.2. Functions
void multicore_lockout_victim_init (void)
Initialize the current core such that it can be a "victim" of lockout (i.e. forced to pause in a known state by the other
core)
bool multicore_lockout_victim_is_initialized (uint core_num)
Determine if multicore_victim_init() has been called on the specified core.
void multicore_lockout_start_blocking (void)
Request the other core to pause in a known state and wait for it to do so.
bool multicore_lockout_start_timeout_us (uint64_t timeout_us)
Request the other core to pause in a known state and wait up to a time limit for it to do so.
void multicore_lockout_end_blocking (void)
Release the other core from a locked out state amd wait for it to acknowledge.
bool multicore_lockout_end_timeout_us (uint64_t timeout_us)
Release the other core from a locked out state amd wait up to a time limit for it to acknowledge.
4.2.6.9.3. Function Documentation
multicore_lockout_end_blocking
void multicore_lockout_end_blocking (void)
Release the other core from a locked out state amd wait for it to acknowledge.
NOTE
The other core must previously have been "locked out" by calling a multicore_lockout_start_ function from this core
multicore_lockout_end_timeout_us
bool multicore_lockout_end_timeout_us (uint64_t timeout_us)
Release the other core from a locked out state amd wait up to a time limit for it to acknowledge.
The other core must previously have been "locked out" by calling a multicore_lockout_start_ function from this core
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 353
NOTE
be very careful using small timeout values, as a timeout here will leave the "lockout" functionality in a bad state. It is
probably preferable to use multicore_lockout_end_blocking anyway as if you have already waited for the victim core
to enter the lockout state, then the victim core will be ready to exit the lockout state very quickly.
Parameters
timeout_us
the timeout in microseconds
Returns
true if the other core successfully exited locked out state within the timeout, false otherwise
multicore_lockout_start_blocking
void multicore_lockout_start_blocking (void)
Request the other core to pause in a known state and wait for it to do so.
The other (victim) core must have previously executed multicore_lockout_victim_init()
NOTE
multicore_lockout_start_ functions are not nestable, and must be paired with a call to a corresponding
multicore_lockout_end_blocking
multicore_lockout_start_timeout_us
bool multicore_lockout_start_timeout_us (uint64_t timeout_us)
Request the other core to pause in a known state and wait up to a time limit for it to do so.
The other core must have previously executed multicore_lockout_victim_init()
NOTE
multicore_lockout_start_ functions are not nestable, and must be paired with a call to a corresponding
multicore_lockout_end_blocking
Parameters
timeout_us
the timeout in microseconds
Returns
true if the other core entered the locked out state within the timeout, false otherwise
multicore_lockout_victim_init
void multicore_lockout_victim_init (void)
Initialize the current core such that it can be a "victim" of lockout (i.e. forced to pause in a known state by the other
core)
This code hooks the intercore FIFO IRQ, and the FIFO may not be used for any other purpose after this.
multicore_lockout_victim_is_initialized
bool multicore_lockout_victim_is_initialized (uint core_num)
Determine if multicore_victim_init() has been called on the specified core.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 354

NOTE
this state persists even if the core is subsequently reset; therefore you are advised to always call
multicore_lockout_victim_init() again after resetting a core, which had previously been initialized.
Parameters
core_num
the core number (0 or 1)
Returns
true if multicore_victim_init() has been called on the specified core, false otherwise.
4.2.7. pico_rand
Random Number Generator API.
4.2.7.1. Detailed Description
This module generates random numbers at runtime utilizing a number of possible entropy sources and uses those
sources to modify the state of a 128-bit 'Pseudo Random Number Generator' implemented in software.
The random numbers (32 to 128 bit) to be supplied are read from the PRNG which is used to help provide a large
number space.
The following (multiple) sources of entropy are available (of varying quality), each enabled by a #define:
•
The Ring Oscillator (ROSC) (PICO_RAND_ENTROPY_SRC_ROSC == 1): PICO_RAND_ROSC_BIT_SAMPLE_COUNT
bits are gathered from the ring oscillator "random bit" and mixed in each time. This should not be used if the ROSC
is off, or the processor is running from the ROSC.
NOTE
the maximum throughput of ROSC bit sampling is controlled by
PICO_RAND_MIN_ROSC_BIT_SAMPLE_TIME_US which defaults to 10us, i.e. 100,000 bits per second.
•
Time (PICO_RAND_ENTROPY_SRC_TIME == 1): The 64-bit microsecond timer is mixed in each time.
•
Bus Performance Counter (PICO_RAND_ENTROPY_SRC_BUS_PERF_COUNTER == 1): One of the bus fabric’s
performance counters is mixed in each time.
NOTE
All entropy sources are hashed before application to the PRNG state machine.
The first time a random number is requested, the 128-bit PRNG state must be seeded. Multiple entropy sources are also
available for the seeding operation:
•
The Ring Oscillator (ROSC) (PICO_RAND_SEED_ENTROPY_SRC_ROSC == 1): 64 bits are gathered from the ring
oscillator "random bit" and mixed into the seed.
•
Time (PICO_RAND_SEED_ENTROPY_SRC_TIME == 1): The 64-bit microsecond timer is mixed into the seed.
•
Board Identifier (PICO_RAND_SEED_ENTROPY_SRC_BOARD_ID == 1): The board id via pico_get_unique_board_id is
mixed into the seed.
•
RAM hash (PICO_RAND_SEED_ENTROPY_SRC_RAM_HASH (PICO_RAND_SEED_ENTROPY_SRC_RAM_HASH): The
hashed contents of a subset of RAM are mixed in. Initial RAM contents are undefined on power up, so provide a
reasonable source of entropy. By default the last 1K of RAM (which usually contains the core 0 stack) is hashed,
which may also provide for differences after each warm reset.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 355

With default settings, the seed generation takes approximately 1 millisecond while subsequent random numbers
generally take between 10 and 20 microseconds to generate.
pico_rand methods may be safely called from either core or from an IRQ, but be careful in the latter case as the calls
may block for a number of microseconds waiting on more entropy.
4.2.7.2. Functions
void get_rand_128 (rng_128_t *rand128)
Get 128-bit random number.
uint64_t get_rand_64 (void)
Get 64-bit random number.
uint32_t get_rand_32 (void)
Get 32-bit random number.
4.2.7.3. Function Documentation
4.2.7.3.1. get_rand_128
void get_rand_128 (rng_128_t * rand128)
Get 128-bit random number.
This method may be safely called from either core or from an IRQ, but be careful in the latter case as the call may block
for a number of microseconds waiting on more entropy.
Parameters
rand128
Pointer to storage to accept a 128-bit random number
4.2.7.3.2. get_rand_32
uint32_t get_rand_32 (void)
Get 32-bit random number.
This method may be safely called from either core or from an IRQ, but be careful in the latter case as the call may block
for a number of microseconds waiting on more entropy.
Returns
32-bit random number
4.2.7.3.3. get_rand_64
uint64_t get_rand_64 (void)
Get 64-bit random number.
This method may be safely called from either core or from an IRQ, but be careful in the latter case as the call may block
for a number of microseconds waiting on more entropy.
Returns
64-bit random number
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 356

4.2.8. pico_sha256
SHA-256 Hardware Accelerated implementation.
4.2.8.1. Detailed Description
RP2350 is equipped with a hardware accelerated implementation of the SHA-256 hash algorithm. This should be much
quicker than performing a SHA-256 checksum in software.
Ê1 pico_sha256_state_t state;
Ê2 if (pico_sha256_try_start(&state, SHA256_BIG_ENDIAN, true) == PICO_OK) {
Ê3 sha256_result_t result;
Ê4 pico_sha256_update(&state, some_data, sizeof(some_data));
Ê5 pico_sha256_update(&state, some_more_data, sizeof(some_more_data));
Ê6 pico_sha256_finish(&state, &result);
Ê7 for (int i = 0; i < SHA256_RESULT_BYTES; i++) {
Ê8 printf("%02x", result.bytes[i]);
Ê9 }
10 }
4.2.8.1.1. Example
Ê1 #include <stdio.h>
Ê2 #include <string.h>
Ê3 #include <inttypes.h>
Ê4 #include <stdlib.h>
Ê5
Ê6 #include "pico/stdlib.h"
Ê7 #include "pico/sha256.h"
Ê8
Ê9 // This was generated by cmake from sample.txt.inc
10 #include "sample.txt.inc"
11
12 static void sha_example() {
13 printf("Text: %d bytes\n", sizeof(sample_txt) - 1);
14 for(int i = 0; i < sizeof(sample_txt) - 1; i++) {
15 if (i > 0 && i % 128 == 0) printf("\n");
16 putchar(sample_txt[i]);
17 }
18 printf("\n");
19
20 // Allocate a state object and start the calculation
21 pico_sha256_state_t state;
22 int rc = pico_sha256_start_blocking(&state, SHA256_BIG_ENDIAN, true); // using some DMA
Ê system resources
23 hard_assert(rc == PICO_OK);
24 pico_sha256_update_blocking(&state, (const uint8_t*)sample_txt, sizeof(sample_txt) - 1);
25
26 // Get the result of the sha256 calculation
27 sha256_result_t result;
28 pico_sha256_finish(&state, &result);
29
30 // print resulting sha256 result
31 printf("Result:\n");
32 for(int i = 0; i < SHA256_RESULT_BYTES; i++) {
33 printf("%02x ", result.bytes[i]);
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 357

34 if ((i+1) % 16 == 0) printf("\n");
35 }
36
37 // check it's what we expect from "sha256sum sample.txt"
38 const uint8_t sha_expected[SHA256_RESULT_BYTES] = {
39 0x2d, 0x8c, 0x2f, 0x6d, 0x97, 0x8c, 0xa2, 0x17, 0x12, 0xb5, 0xf6, 0xde, 0x36, 0xc9,
Ê 0xd3, 0x1f,
40 0xa8, 0xe9, 0x6a, 0x4f, 0xa5, 0xd8, 0xff, 0x8b, 0x01, 0x88, 0xdf, 0xb9, 0xe7, 0xc1,
Ê 0x71, 0xbb
41 };
42 hard_assert(memcmp(sha_expected, &result, SHA256_RESULT_BYTES) == 0);
43 }
44
45
46 #define BUFFER_SIZE 10000
47
48 // A performance test with a large amount of data
49 static void nist_test(bool use_dma) {
50 // nist 3
51 uint8_t *buffer = malloc(BUFFER_SIZE);
52 memset(buffer, 0x61, BUFFER_SIZE);
53 const uint8_t nist_3_expected[] = { \
54 0xcd, 0xc7, 0x6e, 0x5c, 0x99, 0x14, 0xfb, 0x92, 0x81, 0xa1, 0xc7, 0xe2, 0x84, 0xd7,
Ê 0x3e, 0x67,
55 0xf1, 0x80, 0x9a, 0x48, 0xa4, 0x97, 0x20, 0x0e, 0x04, 0x6d, 0x39, 0xcc, 0xc7, 0x11,
Ê 0x2c, 0xd0 };
56
57 uint64_t start = time_us_64();
58 pico_sha256_state_t state;
59 int rc = pico_sha256_start_blocking(&state, SHA256_BIG_ENDIAN, use_dma); // call start
Ê once
60 hard_assert(rc == PICO_OK);
61 for(int i = 0; i < 1000000; i += BUFFER_SIZE) {
62 pico_sha256_update_blocking(&state, buffer, BUFFER_SIZE); // call update as many
Ê times as required
63 }
64 sha256_result_t result;
65 pico_sha256_finish(&state, &result); // Call finish when done to get the result
66
67 // Display the time taken
68 uint64_t pico_time = time_us_64() - start;
69 printf("Time for sha256 of 1M bytes %s DMA %"PRIu64"ms\n", use_dma ? "with" : "without",
Ê pico_time / 1000);
70 hard_assert(memcmp(nist_3_expected, result.bytes, SHA256_RESULT_BYTES) == 0);
71 }
72
73 int main() {
74 stdio_init_all();
75
76 sha_example();
77
78 // performance test with and without DMA
79 nist_test(false);
80 nist_test(true);
81
82 printf("Success\n");
83 }
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 358

4.2.8.2. Typedefs
typedef struct pico_sha256_state pico_sha256_state_t
SHA-256 state used by the API.
4.2.8.3. Functions
int pico_sha256_try_start (pico_sha256_state_t *state, enum sha256_endianness endianness, bool use_dma)
Start a SHA-256 calculation returning immediately with an error if the SHA-256 hardware is not available.
int pico_sha256_start_blocking_until (pico_sha256_state_t *state, enum sha256_endianness endianness, bool use_dma,
absolute_time_t until)
Start a SHA-256 calculation waiting for a defined period for the SHA-256 hardware to be available.
static int pico_sha256_start_blocking (pico_sha256_state_t *state, enum sha256_endianness endianness, bool use_dma)
Start a SHA-256 calculation, blocking forever waiting until the SHA-256 hardware is available.
void pico_sha256_update (pico_sha256_state_t *state, const uint8_t *data, size_t data_size_bytes)
Add byte data to be SHA-256 calculation.
void pico_sha256_update_blocking (pico_sha256_state_t *state, const uint8_t *data, size_t data_size_bytes)
Add byte data to be SHA-256 calculation.
void pico_sha256_finish (pico_sha256_state_t *state, sha256_result_t *out)
Finish the SHA-256 calculation and return the result.
4.2.8.4. Typedef Documentation
4.2.8.4.1. pico_sha256_state_t
typedef struct pico_sha256_state pico_sha256_state_t
SHA-256 state used by the API.
4.2.8.5. Function Documentation
4.2.8.5.1. pico_sha256_finish
void pico_sha256_finish (pico_sha256_state_t * state, sha256_result_t * out)
Finish the SHA-256 calculation and return the result.
Ends the SHA-256 calculation freeing the hardware for use by another caller. You must have called
pico_sha256_try_start already.
Parameters
state
A pointer to a pico_sha256_state_t instance
out
The SHA-256 checksum
4.2.8.5.2. pico_sha256_start_blocking
static int pico_sha256_start_blocking (pico_sha256_state_t * state, enum sha256_endianness endianness, bool use_dma)
[inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 359

Start a SHA-256 calculation, blocking forever waiting until the SHA-256 hardware is available.
Initialises the hardware and state ready to start a new SHA-256 calculation. Only one instance can be started at any
time.
Parameters
state
A pointer to a pico_sha256_state_t instance
endianness
SHA256_BIG_ENDIAN or SHA256_LITTLE_ENDIAN for data in and data out
use_dma
Set to true to use DMA internally to copy data to hardware. This is quicker at the expense of
hardware DMA resources.
Returns
Returns PICO_OK if the hardware was available for use and the sha256 calculation could be started, otherwise an error
is returned
4.2.8.5.3. pico_sha256_start_blocking_until
int pico_sha256_start_blocking_until (pico_sha256_state_t * state, enum sha256_endianness endianness, bool use_dma,
absolute_time_t until)
Start a SHA-256 calculation waiting for a defined period for the SHA-256 hardware to be available.
Initialises the hardware and state ready to start a new SHA-256 calculation. Only one instance can be started at any
time.
Parameters
state
A pointer to a pico_sha256_state_t instance
endianness
SHA256_BIG_ENDIAN or SHA256_LITTLE_ENDIAN for data in and data out
use_dma
Set to true to use DMA internally to copy data to hardware. This is quicker at the expense of
hardware DMA resources.
until
How long to wait for the SHA hardware to be available
Returns
Returns PICO_OK if the hardware was available for use and the sha256 calculation could be started in time, otherwise
an error is returned
4.2.8.5.4. pico_sha256_try_start
int pico_sha256_try_start (pico_sha256_state_t * state, enum sha256_endianness endianness, bool use_dma)
Start a SHA-256 calculation returning immediately with an error if the SHA-256 hardware is not available.
Initialises the hardware and state ready to start a new SHA-256 calculation. Only one instance can be started at any
time.
Parameters
state
A pointer to a pico_sha256_state_t instance
endianness
SHA256_BIG_ENDIAN or SHA256_LITTLE_ENDIAN for data in and data out
use_dma
Set to true to use DMA internally to copy data to hardware. This is quicker at the expense of
hardware DMA resources.
Returns
Returns PICO_OK if the hardware was available for use and the sha256 calculation could be started, otherwise an error
is returned
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 360

4.2.8.5.5. pico_sha256_update
void pico_sha256_update (pico_sha256_state_t * state, const uint8_t * data, size_t data_size_bytes)
Add byte data to be SHA-256 calculation.
Add byte data to be SHA-256 calculation You may call this as many times as required to add all the data needed. You
must have called pico_sha256_try_start (or equivalent) already.
Parameters
state
A pointer to a pico_sha256_state_t instance
data
Pointer to the data to be added to the calculation
data_size_bytes
Amount of data to add
NOTE
This function may return before the copy has completed in which case the data passed to the function must remain
valid and unchanged until a further call to pico_sha256_update or pico_sha256_finish. If this is not done, corrupt
data may be used for the SHA-256 calculation giving an unexpected result.
4.2.8.5.6. pico_sha256_update_blocking
void pico_sha256_update_blocking (pico_sha256_state_t * state, const uint8_t * data, size_t data_size_bytes)
Add byte data to be SHA-256 calculation.
Add byte data to be SHA-256 calculation You may call this as many times as required to add all the data needed. You
must have called pico_sha256_try_start already.
Parameters
state
A pointer to a pico_sha256_state_t instance
data
Pointer to the data to be added to the calculation
data_size_bytes
Amount of data to add
NOTE
This function will only return when the data passed in is no longer required, so it can be freed or changed on return.
4.2.9. pico_stdlib
Aggregation of a core subset of Raspberry Pi Pico SDK libraries used by most executables along with some additional
utility methods.
4.2.9.1. Detailed Description
Including pico_stdlib gives you everything you need to get a basic program running which prints to stdout or flashes a
LED
This library aggregates:
•
hardware_divider
•
hardware_gpio
•
hardware_uart
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 361

•
pico_runtime
•
pico_platform
•
pico_stdio
•
pico_time
•
pico_util
There are some basic default values used by these functions that will default to usable values, however, they can be
customised in a board definition header via config.h or similar
4.2.9.2. Functions
void setup_default_uart (void)
Set up the default UART and assign it to the default GPIOs.
void set_sys_clock_48mhz (void)
Initialise the system clock to 48MHz.
void set_sys_clock_pll (uint32_t vco_freq, uint post_div1, uint post_div2)
Initialise the system clock.
bool check_sys_clock_hz (uint32_t freq_hz, uint *vco_freq_out, uint *post_div1_out, uint *post_div2_out)
Check if a given system clock frequency is valid/attainable.
bool check_sys_clock_khz (uint32_t freq_khz, uint *vco_freq_out, uint *post_div1_out, uint *post_div2_out)
Check if a given system clock frequency is valid/attainable.
static bool set_sys_clock_hz (uint32_t freq_hz, bool required)
Attempt to set a system clock frequency in hz.
static bool set_sys_clock_khz (uint32_t freq_khz, bool required)
Attempt to set a system clock frequency in khz.
4.2.9.3. Function Documentation
4.2.9.3.1. check_sys_clock_hz
bool check_sys_clock_hz (uint32_t freq_hz, uint * vco_freq_out, uint * post_div1_out, uint * post_div2_out)
Check if a given system clock frequency is valid/attainable.
Parameters
freq_hz
Requested frequency
vco_freq_out
On success, the voltage controlled oscillator frequency to be used by the SYS PLL
post_div1_out
On success, The first post divider for the SYS PLL
post_div2_out
On success, The second post divider for the SYS PLL.
Returns
true if the frequency is possible and the output parameters have been written.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 362

4.2.9.3.2. check_sys_clock_khz
bool check_sys_clock_khz (uint32_t freq_khz, uint * vco_freq_out, uint * post_div1_out, uint * post_div2_out)
Check if a given system clock frequency is valid/attainable.
Parameters
freq_khz
Requested frequency
vco_freq_out
On success, the voltage controlled oscillator frequency to be used by the SYS PLL
post_div1_out
On success, The first post divider for the SYS PLL
post_div2_out
On success, The second post divider for the SYS PLL.
Returns
true if the frequency is possible and the output parameters have been written.
4.2.9.3.3. set_sys_clock_48mhz
void set_sys_clock_48mhz (void)
Initialise the system clock to 48MHz.
Set the system clock to 48MHz, and set the peripheral clock to match.
4.2.9.3.4. set_sys_clock_hz
static bool set_sys_clock_hz (uint32_t freq_hz, bool required) [inline], [static]
Attempt to set a system clock frequency in hz.
Note that not all clock frequencies are possible; it is preferred that you use
src/rp2_common/hardware_clocks/scripts/vcocalc.py to calculate the parameters for use with set_sys_clock_pll
Parameters
freq_hz
Requested frequency
required
if true then this function will assert if the frequency is not attainable.
Returns
true if the clock was configured
4.2.9.3.5. set_sys_clock_khz
static bool set_sys_clock_khz (uint32_t freq_khz, bool required) [inline], [static]
Attempt to set a system clock frequency in khz.
Note that not all clock frequencies are possible; it is preferred that you use
src/rp2_common/hardware_clocks/scripts/vcocalc.py to calculate the parameters for use with set_sys_clock_pll
Parameters
freq_khz
Requested frequency
required
if true then this function will assert if the frequency is not attainable.
Returns
true if the clock was configured
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 363

4.2.9.3.6. set_sys_clock_pll
void set_sys_clock_pll (uint32_t vco_freq, uint post_div1, uint post_div2)
Initialise the system clock.
Parameters
vco_freq
The voltage controller oscillator frequency to be used by the SYS PLL
post_div1
The first post divider for the SYS PLL
post_div2
The second post divider for the SYS PLL.
See the PLL documentation in the datasheet for details of driving the PLLs.
4.2.9.3.7. setup_default_uart
void setup_default_uart (void)
Set up the default UART and assign it to the default GPIOs.
By default this will use UART 0, with TX to pin GPIO 0, RX to pin GPIO 1, and the baudrate to 115200
Calling this method also initializes stdin/stdout over UART if the pico_stdio_uart library is linked.
Defaults can be changed using configuration defines, PICO_DEFAULT_UART_INSTANCE,
PICO_DEFAULT_UART_BAUD_RATE PICO_DEFAULT_UART_TX_PIN PICO_DEFAULT_UART_RX_PIN
4.2.10. pico_sync
Synchronization primitives and mutual exclusion.
4.2.10.1. Modules
critical_section
Critical Section API for short-lived mutual exclusion safe for IRQ and multi-core.
lock_core
base synchronization/lock primitive support.
mutex
Mutex API for non IRQ mutual exclusion between cores.
sem
Semaphore API for restricting access to a resource.
4.2.10.2. critical_section
Critical Section API for short-lived mutual exclusion safe for IRQ and multi-core.
4.2.10.2.1. Detailed Description
A critical section is non-reentrant, and provides mutual exclusion using a spin-lock to prevent access from the other
core, and from (higher priority) interrupts on the same core. It does the former using a spin lock and the latter by
disabling interrupts on the calling core.
Because interrupts are disabled when a critical_section is owned, uses of the critical_section should be as short as
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 364

possible.
4.2.10.2.2. Functions
void critical_section_init (critical_section_t *crit_sec)
Initialise a critical_section structure allowing the system to assign a spin lock number.
void critical_section_init_with_lock_num (critical_section_t *crit_sec, uint lock_num)
Initialise a critical_section structure assigning a specific spin lock number.
static void critical_section_enter_blocking (critical_section_t *crit_sec)
Enter a critical_section.
static void critical_section_exit (critical_section_t *crit_sec)
Release a critical_section.
void critical_section_deinit (critical_section_t *crit_sec)
De-Initialise a critical_section created by the critical_section_init method.
4.2.10.2.3. Function Documentation
critical_section_deinit
void critical_section_deinit (critical_section_t * crit_sec)
De-Initialise a critical_section created by the critical_section_init method.
This method is only used to free the associated spin lock allocated via the critical_section_init method (it should not be
used to de-initialize a spin lock created via critical_section_init_with_lock_num). After this call, the critical section is
invalid
Parameters
crit_sec
Pointer to critical_section structure
critical_section_enter_blocking
static void critical_section_enter_blocking (critical_section_t * crit_sec) [inline], [static]
Enter a critical_section.
If the spin lock associated with this critical section is in use, then this method will block until it is released.
Parameters
crit_sec
Pointer to critical_section structure
critical_section_exit
static void critical_section_exit (critical_section_t * crit_sec) [inline], [static]
Release a critical_section.
Parameters
crit_sec
Pointer to critical_section structure
critical_section_init
void critical_section_init (critical_section_t * crit_sec)
Initialise a critical_section structure allowing the system to assign a spin lock number.
The critical section is initialized ready for use, and will use a (possibly shared) spin lock number assigned by the
system. Note that in general it is unlikely that you would be nesting critical sections, however if you do so you must use
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 365

critical_section_init_with_lock_num to ensure that the spin locks used are different.
Parameters
crit_sec
Pointer to critical_section structure
critical_section_init_with_lock_num
void critical_section_init_with_lock_num (critical_section_t * crit_sec, uint lock_num)
Initialise a critical_section structure assigning a specific spin lock number.
Parameters
crit_sec
Pointer to critical_section structure
lock_num
the specific spin lock number to use
4.2.10.3. lock_core
base synchronization/lock primitive support.
4.2.10.3.1. Detailed Description
Most of the pico_sync locking primitives contain a lock_core_t structure member. This currently just holds a spin lock
which is used only to protect the contents of the rest of the structure as part of implementing the synchronization
primitive. As such, the spin_lock member of lock core is never still held on return from any function for the primitive.
critical_section is an exceptional case in that it does not have a lock_core_t and simply wraps a spin lock, providing
methods to lock and unlock said spin lock.
lock_core based structures work by locking the spin lock, checking state, and then deciding whether they additionally
need to block or notify when the spin lock is released. In the blocking case, they will wake up again in the future, and try
the process again.
By default the SDK just uses the processors' events via SEV and WEV for notification and blocking as these are
sufficient for cross core, and notification from interrupt handlers. However macros are defined in this file that abstract
the wait and notify mechanisms to allow the SDK locking functions to effectively be used within an RTOS or other
environment.
When implementing an RTOS, it is desirable for the SDK synchronization primitives that wait, to block the calling task
(and immediately yield), and those that notify, to wake a blocked task which isn’t on processor. At least the wait macro
implementation needs to be atomic with the protecting spin_lock unlock from the callers point of view; i.e. the task
should unlock the spin lock when it starts its wait. Such implementation is up to the RTOS integration, however the
macros are defined such that such operations are always combined into a single call (so they can be performed
atomically) even though the default implementation does not need this, as a WFE which starts following the
corresponding SEV is not missed.
4.2.10.3.2. Macros
•
#define lock_owner_id_t int8_t
•
#define LOCK_INVALID_OWNER_ID ((lock_owner_id_t)-1)
•
#define lock_get_caller_owner_id() ((lock_owner_id_t)get_core_num())
•
#define lock_internal_spin_unlock_with_wait(lock, save) spin_unlock((lock)->spin_lock, save), __wfe()
•
#define lock_internal_spin_unlock_with_notify(lock, save) spin_unlock((lock)->spin_lock, save), __sev()
•
#define lock_internal_spin_unlock_with_best_effort_wait_or_timeout(lock, save, until)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 366

•
#define sync_internal_yield_until_before(until) ((void)0)
4.2.10.3.3. Functions
void lock_init (lock_core_t *core, uint lock_num)
Initialise a lock structure.
4.2.10.3.4. Macro Definition Documentation
lock_owner_id_t
#define lock_owner_id_t int8_t
type to use to store the 'owner' of a lock.
By default this is int8_t as it only needs to store the core number or -1, however it may be overridden if a larger type is
required (e.g. for an RTOS task id)
LOCK_INVALID_OWNER_ID
#define LOCK_INVALID_OWNER_ID ((lock_owner_id_t)-1)
marker value to use for a lock_owner_id_t which does not refer to any valid owner
lock_get_caller_owner_id
#define lock_get_caller_owner_id() ((lock_owner_id_t)get_core_num())
return the owner id for the caller
By default this returns the calling core number, but may be overridden (e.g. to return an RTOS task id)
lock_internal_spin_unlock_with_wait
#define lock_internal_spin_unlock_with_wait(lock, save) spin_unlock((lock)->spin_lock, save), __wfe()
Atomically unlock the lock’s spin lock, and wait for a notification.
Atomic here refers to the fact that it should not be possible for a concurrent lock_internal_spin_unlock_with_notify to
insert itself between the spin unlock and this wait in a way that the wait does not see the notification (i.e. causing a
missed notification). In other words this method should always wake up in response to a
lock_internal_spin_unlock_with_notify for the same lock, which completes after this call starts.
In an ideal implementation, this method would return exactly after the corresponding
lock_internal_spin_unlock_with_notify has subsequently been called on the same lock instance, however this method is
free to return at any point before that; this macro is always used in a loop which locks the spin lock, checks the internal
locking primitive state and then waits again if the calling thread should not proceed.
By default this macro simply unlocks the spin lock, and then performs a WFE, but may be overridden (e.g. to actually
block the RTOS task).
Parameters
lock
the lock_core for the primitive which needs to block
save
the uint32_t value that should be passed to spin_unlock when the spin lock is unlocked. (i.e. the PRIMASK
state when the spin lock was acquire
lock_internal_spin_unlock_with_notify
#define lock_internal_spin_unlock_with_notify(lock, save) spin_unlock((lock)->spin_lock, save), __sev()
Atomically unlock the lock’s spin lock, and send a notification.
Atomic here refers to the fact that it should not be possible for this notification to happen during a
lock_internal_spin_unlock_with_wait in a way that that wait does not see the notification (i.e. causing a missed
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 367

notification). In other words this method should always wake up any lock_internal_spin_unlock_with_wait which started
before this call completes.
In an ideal implementation, this method would wake up only the corresponding lock_internal_spin_unlock_with_wait that
has been called on the same lock instance, however it is free to wake up any of them, as they will check their condition
and then re-wait if necessary/
By default this macro simply unlocks the spin lock, and then performs a SEV, but may be overridden (e.g. to actually un-
block RTOS task(s)).
Parameters
lock
the lock_core for the primitive which needs to block
save
the uint32_t value that should be passed to spin_unlock when the spin lock is unlocked. (i.e. the
PRIMASK state when the spin lock was acquire)
lock_internal_spin_unlock_with_best_effort_wait_or_timeout
#define lock_internal_spin_unlock_with_best_effort_wait_or_timeout(lock, save, until) ({ \
Ê spin_unlock((lock)->spin_lock, save); \
Ê best_effort_wfe_or_timeout(until); \
})
Atomically unlock the lock’s spin lock, and wait for a notification or a timeout.
Atomic here refers to the fact that it should not be possible for a concurrent lock_internal_spin_unlock_with_notify to
insert itself between the spin unlock and this wait in a way that the wait does not see the notification (i.e. causing a
missed notification). In other words this method should always wake up in response to a
lock_internal_spin_unlock_with_notify for the same lock, which completes after this call starts.
In an ideal implementation, this method would return exactly after the corresponding
lock_internal_spin_unlock_with_notify has subsequently been called on the same lock instance or the timeout has been
reached, however this method is free to return at any point before that; this macro is always used in a loop which locks
the spin lock, checks the internal locking primitive state and then waits again if the calling thread should not proceed.
By default this simply unlocks the spin lock, and then calls best_effort_wfe_or_timeout but may be overridden (e.g. to
actually block the RTOS task with a timeout).
Parameters
lock
the lock_core for the primitive which needs to block
save
the uint32_t value that should be passed to spin_unlock when the spin lock is unlocked. (i.e. the
PRIMASK state when the spin lock was acquire)
until
the absolute_time_t value
Returns
true if the timeout has been reached
sync_internal_yield_until_before
#define sync_internal_yield_until_before(until) ((void)0)
yield to other processing until some time before the requested time
This method is provided for cases where the caller has no useful work to do until the specified time.
By default this method does nothing, however it can be overridden (for example by an RTOS which is able to block the
current task until the scheduler tick before the given time)
Parameters
until
the absolute_time_t value
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 368

4.2.10.3.5. Function Documentation
lock_init
void lock_init (lock_core_t * core, uint lock_num)
Initialise a lock structure.
Inititalize a lock structure, providing the spin lock number to use for protecting internal state.
Parameters
core
Pointer to the lock_core to initialize
lock_num
Spin lock number to use for the lock. As the spin lock is only used internally to the locking primitive
method implementations, this does not need to be globally unique, however could suffer contention
4.2.10.4. mutex
Mutex API for non IRQ mutual exclusion between cores.
4.2.10.4.1. Detailed Description
Mutexes are application level locks usually used protecting data structures that might be used by multiple threads of
execution. Unlike critical sections, the mutex protected code is not necessarily required/expected to complete quickly,
as no other system wide locks are held on account of an acquired mutex.
When acquired, the mutex has an owner (see lock_get_caller_owner_id) which with the plain SDK is just the acquiring
core, but in an RTOS it could be a task, or an IRQ handler context.
Two variants of mutex are provided; mutex_t (and associated mutex_ functions) is a regular mutex that cannot be
acquired recursively by the same owner (a deadlock will occur if you try). recursive_mutex_t (and associated
recursive_mutex_ functions) is a recursive mutex that can be recursively obtained by the same caller, at the expense of
some more overhead when acquiring and releasing.
It is generally a bad idea to call blocking mutex_ or recursive_mutex_ functions from within an IRQ handler. It is valid to
call mutex_try_enter or recursive_mutex_try_enter from within an IRQ handler, if the operation that would be conducted
under lock can be skipped if the mutex is locked (at least by the same owner).
NOTE
For backwards compatibility with version 1.2.0 of the SDK, if the define
PICO_MUTEX_ENABLE_SDK120_COMPATIBILITY is set to 1, then the the regular mutex_ functions may also be used
for recursive mutexes. This flag will be removed in a future version of the SDK.
See critical_section.h for protecting access between multiple cores AND IRQ handlers
4.2.10.4.2. Macros
•
#define auto_init_mutex(name) static __attribute__((section(".mutex_array"))) mutex_t name
•
#define auto_init_recursive_mutex(name) static __attribute__((section(".mutex_array"))) recursive_mutex_t name = {
.core = { .spin_lock = (spin_lock_t *)1 /* marker for runtime_init */ }, .owner = 0, .enter_count = 0 }
4.2.10.4.3. Typedefs
typedef struct mutex mutex_t
regular (non recursive) mutex instance
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 369

4.2.10.4.4. Functions
static bool critical_section_is_initialized (critical_section_t *crit_sec)
Test whether a critical_section has been initialized.
void mutex_init (mutex_t *mtx)
Initialise a mutex structure.
void recursive_mutex_init (recursive_mutex_t *mtx)
Initialise a recursive mutex structure.
void mutex_enter_blocking (mutex_t *mtx)
Take ownership of a mutex.
void recursive_mutex_enter_blocking (recursive_mutex_t *mtx)
Take ownership of a recursive mutex.
bool mutex_try_enter (mutex_t *mtx, uint32_t *owner_out)
Attempt to take ownership of a mutex.
bool mutex_try_enter_block_until (mutex_t *mtx, absolute_time_t until)
Attempt to take ownership of a mutex until the specified time.
bool recursive_mutex_try_enter (recursive_mutex_t *mtx, uint32_t *owner_out)
Attempt to take ownership of a recursive mutex.
bool mutex_enter_timeout_ms (mutex_t *mtx, uint32_t timeout_ms)
Wait for mutex with timeout.
bool recursive_mutex_enter_timeout_ms (recursive_mutex_t *mtx, uint32_t timeout_ms)
Wait for recursive mutex with timeout.
bool mutex_enter_timeout_us (mutex_t *mtx, uint32_t timeout_us)
Wait for mutex with timeout.
bool recursive_mutex_enter_timeout_us (recursive_mutex_t *mtx, uint32_t timeout_us)
Wait for recursive mutex with timeout.
bool mutex_enter_block_until (mutex_t *mtx, absolute_time_t until)
Wait for mutex until a specific time.
bool recursive_mutex_enter_block_until (recursive_mutex_t *mtx, absolute_time_t until)
Wait for mutex until a specific time.
void mutex_exit (mutex_t *mtx)
Release ownership of a mutex.
void recursive_mutex_exit (recursive_mutex_t *mtx)
Release ownership of a recursive mutex.
static bool mutex_is_initialized (mutex_t *mtx)
Test for mutex initialized state.
static bool recursive_mutex_is_initialized (recursive_mutex_t *mtx)
Test for recursive mutex initialized state.
4.2.10.4.5. Macro Definition Documentation
auto_init_mutex
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 370

#define auto_init_mutex(name) static __attribute__((section(".mutex_array"))) mutex_t name
Helper macro for static definition of mutexes.
A mutex defined as follows:
1 auto_init_mutex(my_mutex);
Is equivalent to doing
1 static mutex_t my_mutex;
2
3 void my_init_function() {
4 mutex_init(&my_mutex);
5 }
But the initialization of the mutex is performed automatically during runtime initialization
auto_init_recursive_mutex
#define auto_init_recursive_mutex(name) static __attribute__((section(".mutex_array"))) recursive_mutex_t name = { .core
= { .spin_lock = (spin_lock_t *)1 /* marker for runtime_init */ }, .owner = 0, .enter_count = 0 }
Helper macro for static definition of recursive mutexes.
A recursive mutex defined as follows:
1 auto_init_recursive_mutex(my_recursive_mutex);
Is equivalent to doing
1 static recursive_mutex_t my_recursive_mutex;
2
3 void my_init_function() {
4 recursive_mutex_init(&my_recursive_mutex);
5 }
But the initialization of the mutex is performed automatically during runtime initialization
4.2.10.4.6. Typedef Documentation
mutex_t
typedef struct mutex mutex_t
regular (non recursive) mutex instance
4.2.10.4.7. Function Documentation
critical_section_is_initialized
static bool critical_section_is_initialized (critical_section_t * crit_sec) [inline], [static]
Test whether a critical_section has been initialized.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 371

Parameters
crit_sec
Pointer to critical_section structure
Returns
true if the critical section is initialized, false otherwise
mutex_enter_block_until
bool mutex_enter_block_until (mutex_t * mtx, absolute_time_t until)
Wait for mutex until a specific time.
Wait until the specific time to take ownership of the mutex. If the caller can be granted ownership of the mutex before
the timeout expires, then true will be returned and the caller will own the mutex, otherwise false will be returned and the
caller will NOT own the mutex.
Parameters
mtx
Pointer to mutex structure
until
The time after which to return if the caller cannot be granted ownership of the mutex
Returns
true if mutex now owned, false if timeout occurred before ownership could be granted
mutex_enter_blocking
void mutex_enter_blocking (mutex_t * mtx)
Take ownership of a mutex.
This function will block until the caller can be granted ownership of the mutex. On return the caller owns the mutex
Parameters
mtx
Pointer to mutex structure
mutex_enter_timeout_ms
bool mutex_enter_timeout_ms (mutex_t * mtx, uint32_t timeout_ms)
Wait for mutex with timeout.
Wait for up to the specific time to take ownership of the mutex. If the caller can be granted ownership of the mutex
before the timeout expires, then true will be returned and the caller will own the mutex, otherwise false will be returned
and the caller will NOT own the mutex.
Parameters
mtx
Pointer to mutex structure
timeout_ms
The timeout in milliseconds.
Returns
true if mutex now owned, false if timeout occurred before ownership could be granted
mutex_enter_timeout_us
bool mutex_enter_timeout_us (mutex_t * mtx, uint32_t timeout_us)
Wait for mutex with timeout.
Wait for up to the specific time to take ownership of the mutex. If the caller can be granted ownership of the mutex
before the timeout expires, then true will be returned and the caller will own the mutex, otherwise false will be returned
and the caller will NOT own the mutex.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 372

mtx
Pointer to mutex structure
timeout_us
The timeout in microseconds.
Returns
true if mutex now owned, false if timeout occurred before ownership could be granted
mutex_exit
void mutex_exit (mutex_t * mtx)
Release ownership of a mutex.
Parameters
mtx
Pointer to mutex structure
mutex_init
void mutex_init (mutex_t * mtx)
Initialise a mutex structure.
Parameters
mtx
Pointer to mutex structure
mutex_is_initialized
static bool mutex_is_initialized (mutex_t * mtx) [inline], [static]
Test for mutex initialized state.
Parameters
mtx
Pointer to mutex structure
Returns
true if the mutex is initialized, false otherwise
mutex_try_enter
bool mutex_try_enter (mutex_t * mtx, uint32_t * owner_out)
Attempt to take ownership of a mutex.
If the mutex wasn’t owned, this will claim the mutex for the caller and return true. Otherwise (if the mutex was already
owned) this will return false and the caller will NOT own the mutex.
Parameters
mtx
Pointer to mutex structure
owner_out
If mutex was already owned, and this pointer is non-zero, it will be filled in with the owner id of the
current owner of the mutex
Returns
true if mutex now owned, false otherwise
mutex_try_enter_block_until
bool mutex_try_enter_block_until (mutex_t * mtx, absolute_time_t until)
Attempt to take ownership of a mutex until the specified time.
If the mutex wasn’t owned, this method will immediately claim the mutex for the caller and return true. If the mutex is
owned by the caller, this method will immediately return false, If the mutex is owned by someone else, this method will
try to claim it until the specified time, returning true if it succeeds, or false on timeout
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 373

mtx
Pointer to mutex structure
until
The time after which to return if the caller cannot be granted ownership of the mutex
Returns
true if mutex now owned, false otherwise
recursive_mutex_enter_block_until
bool recursive_mutex_enter_block_until (recursive_mutex_t * mtx, absolute_time_t until)
Wait for mutex until a specific time.
Wait until the specific time to take ownership of the mutex. If the caller already has ownership of the mutex or can be
granted ownership of the mutex before the timeout expires, then true will be returned and the caller will own the mutex,
otherwise false will be returned and the caller will NOT own the mutex.
Parameters
mtx
Pointer to recursive mutex structure
until
The time after which to return if the caller cannot be granted ownership of the mutex
Returns
true if the recursive mutex (now) owned, false if timeout occurred before ownership could be granted
recursive_mutex_enter_blocking
void recursive_mutex_enter_blocking (recursive_mutex_t * mtx)
Take ownership of a recursive mutex.
This function will block until the caller can be granted ownership of the mutex. On return the caller owns the mutex
Parameters
mtx
Pointer to recursive mutex structure
recursive_mutex_enter_timeout_ms
bool recursive_mutex_enter_timeout_ms (recursive_mutex_t * mtx, uint32_t timeout_ms)
Wait for recursive mutex with timeout.
Wait for up to the specific time to take ownership of the recursive mutex. If the caller already has ownership of the
mutex or can be granted ownership of the mutex before the timeout expires, then true will be returned and the caller will
own the mutex, otherwise false will be returned and the caller will NOT own the mutex.
Parameters
mtx
Pointer to recursive mutex structure
timeout_ms
The timeout in milliseconds.
Returns
true if the recursive mutex (now) owned, false if timeout occurred before ownership could be granted
recursive_mutex_enter_timeout_us
bool recursive_mutex_enter_timeout_us (recursive_mutex_t * mtx, uint32_t timeout_us)
Wait for recursive mutex with timeout.
Wait for up to the specific time to take ownership of the recursive mutex. If the caller already has ownership of the
mutex or can be granted ownership of the mutex before the timeout expires, then true will be returned and the caller will
own the mutex, otherwise false will be returned and the caller will NOT own the mutex.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 374

mtx
Pointer to mutex structure
timeout_us
The timeout in microseconds.
Returns
true if the recursive mutex (now) owned, false if timeout occurred before ownership could be granted
recursive_mutex_exit
void recursive_mutex_exit (recursive_mutex_t * mtx)
Release ownership of a recursive mutex.
Parameters
mtx
Pointer to recursive mutex structure
recursive_mutex_init
void recursive_mutex_init (recursive_mutex_t * mtx)
Initialise a recursive mutex structure.
A recursive mutex may be entered in a nested fashion by the same owner
Parameters
mtx
Pointer to recursive mutex structure
recursive_mutex_is_initialized
static bool recursive_mutex_is_initialized (recursive_mutex_t * mtx) [inline], [static]
Test for recursive mutex initialized state.
Parameters
mtx
Pointer to recursive mutex structure
Returns
true if the recursive mutex is initialized, false otherwise
recursive_mutex_try_enter
bool recursive_mutex_try_enter (recursive_mutex_t * mtx, uint32_t * owner_out)
Attempt to take ownership of a recursive mutex.
If the mutex wasn’t owned or was owned by the caller, this will claim the mutex and return true. Otherwise (if the mutex
was already owned by another owner) this will return false and the caller will NOT own the mutex.
Parameters
mtx
Pointer to recursive mutex structure
owner_out
If mutex was already owned by another owner, and this pointer is non-zero, it will be filled in with the
owner id of the current owner of the mutex
Returns
true if the recursive mutex (now) owned, false otherwise
4.2.10.5. sem
Semaphore API for restricting access to a resource.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 375

4.2.10.5.1. Detailed Description
A semaphore holds a number of available permits. sem_acquire methods will acquire a permit if available (reducing the
available count by 1) or block if the number of available permits is 0. sem_release() increases the number of available
permits by one potentially unblocking a sem_acquire method.
Note that sem_release() may be called an arbitrary number of times, however the number of available permits is capped
to the max_permit value specified during semaphore initialization.
Although these semaphore related functions can be used from IRQ handlers, it is obviously preferable to only release
semaphores from within an IRQ handler (i.e. avoid blocking)
4.2.10.5.2. Functions
void sem_init (semaphore_t *sem, int16_t initial_permits, int16_t max_permits)
Initialise a semaphore structure.
int sem_available (semaphore_t *sem)
Return number of available permits on the semaphore.
bool sem_release (semaphore_t *sem)
Release a permit on a semaphore.
void sem_reset (semaphore_t *sem, int16_t permits)
Reset semaphore to a specific number of available permits.
void sem_acquire_blocking (semaphore_t *sem)
Acquire a permit from the semaphore.
bool sem_acquire_timeout_ms (semaphore_t *sem, uint32_t timeout_ms)
Acquire a permit from a semaphore, with timeout.
bool sem_acquire_timeout_us (semaphore_t *sem, uint32_t timeout_us)
Acquire a permit from a semaphore, with timeout.
bool sem_acquire_block_until (semaphore_t *sem, absolute_time_t until)
Wait to acquire a permit from a semaphore until a specific time.
bool sem_try_acquire (semaphore_t *sem)
Attempt to acquire a permit from a semaphore without blocking.
4.2.10.5.3. Function Documentation
sem_acquire_block_until
bool sem_acquire_block_until (semaphore_t * sem, absolute_time_t until)
Wait to acquire a permit from a semaphore until a specific time.
This function will block and wait if no permits are available, until the specified timeout time. If the timeout is reached the
function will return false, otherwise it will return true.
Parameters
sem
Pointer to semaphore structure
until
The time after which to return if the sem is not available.
Returns
true if permit was acquired, false if the until time was reached before acquiring.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 376

sem_acquire_blocking
void sem_acquire_blocking (semaphore_t * sem)
Acquire a permit from the semaphore.
This function will block and wait if no permits are available.
Parameters
sem
Pointer to semaphore structure
sem_acquire_timeout_ms
bool sem_acquire_timeout_ms (semaphore_t * sem, uint32_t timeout_ms)
Acquire a permit from a semaphore, with timeout.
This function will block and wait if no permits are available, until the defined timeout has been reached. If the timeout is
reached the function will return false, otherwise it will return true.
Parameters
sem
Pointer to semaphore structure
timeout_ms
Time to wait to acquire the semaphore, in milliseconds.
Returns
false if timeout reached, true if permit was acquired.
sem_acquire_timeout_us
bool sem_acquire_timeout_us (semaphore_t * sem, uint32_t timeout_us)
Acquire a permit from a semaphore, with timeout.
This function will block and wait if no permits are available, until the defined timeout has been reached. If the timeout is
reached the function will return false, otherwise it will return true.
Parameters
sem
Pointer to semaphore structure
timeout_us
Time to wait to acquire the semaphore, in microseconds.
Returns
false if timeout reached, true if permit was acquired.
sem_available
int sem_available (semaphore_t * sem)
Return number of available permits on the semaphore.
Parameters
sem
Pointer to semaphore structure
Returns
The number of permits available on the semaphore.
sem_init
void sem_init (semaphore_t * sem, int16_t initial_permits, int16_t max_permits)
Initialise a semaphore structure.
Parameters
sem
Pointer to semaphore structure
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 377

initial_permits
How many permits are initially acquired
max_permits
Total number of permits allowed for this semaphore
sem_release
bool sem_release (semaphore_t * sem)
Release a permit on a semaphore.
Increases the number of permits by one (unless the number of permits is already at the maximum). A blocked
sem_acquire will be released if the number of permits is increased.
Parameters
sem
Pointer to semaphore structure
Returns
true if the number of permits available was increased.
sem_reset
void sem_reset (semaphore_t * sem, int16_t permits)
Reset semaphore to a specific number of available permits.
Reset value should be from 0 to the max_permits specified in the init function
Parameters
sem
Pointer to semaphore structure
permits
the new number of available permits
sem_try_acquire
bool sem_try_acquire (semaphore_t * sem)
Attempt to acquire a permit from a semaphore without blocking.
This function will return false without blocking if no permits are available, otherwise it will acquire a permit and return
true.
Parameters
sem
Pointer to semaphore structure
Returns
true if permit was acquired.
4.2.11. pico_time
API for accurate timestamps, sleeping, and time based callbacks.
4.2.11.1. Detailed Description
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 378

NOTE
The functions defined here provide a much more powerful and user friendly wrapping around the low level hardware
timer functionality. For these functions (and any other SDK functionality e.g. timeouts, that relies on them) to work
correctly, the hardware timer should not be modified. i.e. it is expected to be monotonically increasing once per
microsecond. Fortunately there is no need to modify the hardware timer as any functionality you can think of that
isn’t already covered here can easily be modelled by adding or subtracting a constant value from the unmodified
hardware timer.
See also
hardware_timer
4.2.11.2. Modules
timestamp
Timestamp functions relating to points in time (including the current time).
sleep
Sleep functions for delaying execution in a lower power state.
alarm
Alarm functions for scheduling future execution.
repeating_timer
Repeating Timer functions for simple scheduling of repeated execution.
4.2.11.3. timestamp
Timestamp functions relating to points in time (including the current time).
4.2.11.3.1. Detailed Description
These are functions for dealing with timestamps (i.e. instants in time) represented by the type absolute_time_t. This
opaque type is provided to help prevent accidental mixing of timestamps and relative time values.
4.2.11.3.2. Functions
static uint64_t to_us_since_boot (absolute_time_t t)
convert an absolute_time_t into a number of microseconds since boot.
static void update_us_since_boot (absolute_time_t *t, uint64_t us_since_boot)
update an absolute_time_t value to represent a given number of microseconds since boot
static absolute_time_t from_us_since_boot (uint64_t us_since_boot)
convert a number of microseconds since boot to an absolute_time_t
static absolute_time_t get_absolute_time (void)
Return a representation of the current time.
static uint32_t to_ms_since_boot (absolute_time_t t)
Convert a timestamp into a number of milliseconds since boot.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 379
static absolute_time_t delayed_by_us (const absolute_time_t t, uint64_t us)
Return a timestamp value obtained by adding a number of microseconds to another timestamp.
static absolute_time_t delayed_by_ms (const absolute_time_t t, uint32_t ms)
Return a timestamp value obtained by adding a number of milliseconds to another timestamp.
static absolute_time_t make_timeout_time_us (uint64_t us)
Convenience method to get the timestamp a number of microseconds from the current time.
static absolute_time_t make_timeout_time_ms (uint32_t ms)
Convenience method to get the timestamp a number of milliseconds from the current time.
static int64_t absolute_time_diff_us (absolute_time_t from, absolute_time_t to)
Return the difference in microseconds between two timestamps.
static absolute_time_t absolute_time_min (absolute_time_t a, absolute_time_t b)
Return the earlier of two timestamps.
static bool is_at_the_end_of_time (absolute_time_t t)
Determine if the given timestamp is "at_the_end_of_time".
static bool is_nil_time (absolute_time_t t)
Determine if the given timestamp is nil.
4.2.11.3.3. Variables
const absolute_time_t at_the_end_of_time
The timestamp representing the end of time; this is actually not the maximum possible timestamp, but is set to
0x7fffffff_ffffffff microseconds to avoid sign overflows with time arithmetic. This is almost 300,000 years, so
should be sufficient.
const absolute_time_t nil_time
The timestamp representing a null timestamp.
4.2.11.3.4. Function Documentation
absolute_time_diff_us
static int64_t absolute_time_diff_us (absolute_time_t from, absolute_time_t to) [inline], [static]
Return the difference in microseconds between two timestamps.
NOTE
be careful when diffing against large timestamps (e.g. at_the_end_of_time) as the signed integer may overflow.
Parameters
from
the first timestamp
to
the second timestamp
Returns
the number of microseconds between the two timestamps (positive if to is after from except in case of overflow)
absolute_time_min
static absolute_time_t absolute_time_min (absolute_time_t a, absolute_time_t b) [inline], [static]
Return the earlier of two timestamps.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 380

Parameters
a
the first timestamp
b
the second timestamp
Returns
the earlier of the two timestamps
delayed_by_ms
static absolute_time_t delayed_by_ms (const absolute_time_t t, uint32_t ms) [inline], [static]
Return a timestamp value obtained by adding a number of milliseconds to another timestamp.
Parameters
t
the base timestamp
ms
the number of milliseconds to add
Returns
the timestamp representing the resulting time
delayed_by_us
static absolute_time_t delayed_by_us (const absolute_time_t t, uint64_t us) [inline], [static]
Return a timestamp value obtained by adding a number of microseconds to another timestamp.
Parameters
t
the base timestamp
us
the number of microseconds to add
Returns
the timestamp representing the resulting time
from_us_since_boot
static absolute_time_t from_us_since_boot (uint64_t us_since_boot) [inline], [static]
convert a number of microseconds since boot to an absolute_time_t
fn from_us_since_boot
Parameters
us_since_boot
number of microseconds since boot
Returns
an absolute time equivalent to us_since_boot
get_absolute_time
static absolute_time_t get_absolute_time (void) [inline], [static]
Return a representation of the current time.
Returns an opaque high fidelity representation of the current time sampled during the call.
Returns
the absolute time (now) of the hardware timer
See also
absolute_time_t
sleep_until()
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 381

time_us_64()
is_at_the_end_of_time
static bool is_at_the_end_of_time (absolute_time_t t) [inline], [static]
Determine if the given timestamp is "at_the_end_of_time".
Parameters
t
the timestamp
Returns
true if the timestamp is at_the_end_of_time
See also
at_the_end_of_time
is_nil_time
static bool is_nil_time (absolute_time_t t) [inline], [static]
Determine if the given timestamp is nil.
Parameters
t
the timestamp
Returns
true if the timestamp is nil
See also
nil_time
make_timeout_time_ms
static absolute_time_t make_timeout_time_ms (uint32_t ms) [inline], [static]
Convenience method to get the timestamp a number of milliseconds from the current time.
Parameters
ms
the number of milliseconds to add to the current timestamp
Returns
the future timestamp
make_timeout_time_us
static absolute_time_t make_timeout_time_us (uint64_t us) [inline], [static]
Convenience method to get the timestamp a number of microseconds from the current time.
Parameters
us
the number of microseconds to add to the current timestamp
Returns
the future timestamp
to_ms_since_boot
static uint32_t to_ms_since_boot (absolute_time_t t) [inline], [static]
Convert a timestamp into a number of milliseconds since boot.
fn to_ms_since_boot
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 382

t
an absolute_time_t value to convert
Returns
the number of milliseconds since boot represented by t
See also
to_us_since_boot()
to_us_since_boot
static uint64_t to_us_since_boot (absolute_time_t t) [inline], [static]
convert an absolute_time_t into a number of microseconds since boot.
fn to_us_since_boot
Parameters
t
the absolute time to convert
Returns
a number of microseconds since boot, equivalent to t
update_us_since_boot
static void update_us_since_boot (absolute_time_t * t, uint64_t us_since_boot) [inline], [static]
update an absolute_time_t value to represent a given number of microseconds since boot
fn update_us_since_boot
Parameters
t
the absolute time value to update
us_since_boot
the number of microseconds since boot to represent. Note this should be representable as a
signed 64 bit integer
4.2.11.3.5. Variable Documentation
at_the_end_of_time
const absolute_time_t at_the_end_of_time
The timestamp representing the end of time; this is actually not the maximum possible timestamp, but is set to
0x7fffffff_ffffffff microseconds to avoid sign overflows with time arithmetic. This is almost 300,000 years, so should be
sufficient.
nil_time
const absolute_time_t nil_time
The timestamp representing a null timestamp.
4.2.11.4. sleep
Sleep functions for delaying execution in a lower power state.
4.2.11.4.1. Detailed Description
These functions allow the calling core to sleep. This is a lower powered sleep; waking and re-checking time on every
processor event (WFE)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 383

NOTE
These functions should not be called from an IRQ handler.
Lower powered sleep requires use of the default alarm pool which may be disabled by the
PICO_TIME_DEFAULT_ALARM_POOL_DISABLED #define or currently full in which case these functions become busy
waits instead.
Whilst sleep_ functions are preferable to busy_wait functions from a power perspective, the busy_wait equivalent
function may return slightly sooner after the target is reached.
See also
busy_wait_until()
busy_wait_us()
busy_wait_us_32()
4.2.11.4.2. Functions
void sleep_until (absolute_time_t target)
Wait until after the given timestamp to return.
void sleep_us (uint64_t us)
Wait for the given number of microseconds before returning.
void sleep_ms (uint32_t ms)
Wait for the given number of milliseconds before returning.
bool best_effort_wfe_or_timeout (absolute_time_t timeout_timestamp)
Helper method for blocking on a timeout.
4.2.11.4.3. Function Documentation
best_effort_wfe_or_timeout
bool best_effort_wfe_or_timeout (absolute_time_t timeout_timestamp)
Helper method for blocking on a timeout.
This method will return in response to an event (as per __wfe) or when the target time is reached, or at any point before.
This method can be used to implement a lower power polling loop waiting on some condition signalled by an event
(__sev()).
This is called best_effort because under certain circumstances (notably the default timer pool being disabled or full) the
best effort is simply to return immediately without a __wfe, thus turning the calling code into a busy wait.
Example usage:
Ê1 bool my_function_with_timeout_us(uint64_t timeout_us) {
Ê2 absolute_time_t timeout_time = make_timeout_time_us(timeout_us);
Ê3 do {
Ê4 // each time round the loop, we check to see if the condition
Ê5 // we are waiting on has happened
Ê6 if (my_check_done()) {
Ê7 // do something
Ê8 return true;
Ê9 }
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 384

10 // will try to sleep until timeout or the next processor event
11 } while (!best_effort_wfe_or_timeout(timeout_time));
12 return false; // timed out
13 }
Parameters
timeout_timestamp
the timeout time
Returns
true if the target time is reached, false otherwise
sleep_ms
void sleep_ms (uint32_t ms)
Wait for the given number of milliseconds before returning.
NOTE
This method attempts to perform a lower power sleep (using WFE) as much as possible.
Parameters
ms
the number of milliseconds to sleep
sleep_until
void sleep_until (absolute_time_t target)
Wait until after the given timestamp to return.
NOTE
This method attempts to perform a lower power (WFE) sleep
Parameters
target
the time after which to return
See also
sleep_us()
busy_wait_until()
sleep_us
void sleep_us (uint64_t us)
Wait for the given number of microseconds before returning.
NOTE
This method attempts to perform a lower power (WFE) sleep
Parameters
us
the number of microseconds to sleep
See also
busy_wait_us()
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 385

4.2.11.5. alarm
Alarm functions for scheduling future execution.
4.2.11.5.1. Detailed Description
Alarms are added to alarm pools, which may hold a certain fixed number of active alarms. Each alarm pool utilizes one
of four underlying timer_alarms, thus you may have up to four alarm pools. An alarm pool calls (except when the
callback would happen before or during being set) the callback on the core from which the alarm pool was created.
Callbacks are called from the timer_alarm IRQ handler, so care must be taken in their implementation.
A default pool is created the core specified by PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM on core
0, and may be used by the method variants that take no alarm pool parameter.
See also
struct alarm_pool
hardware_timer
4.2.11.5.2. Macros
•
#define PICO_TIME_DEFAULT_ALARM_POOL_DISABLED 0
•
#define PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM 3
•
#define PICO_TIME_DEFAULT_ALARM_POOL_MAX_TIMERS 16
4.2.11.5.3. Typedefs
typedef int32_t alarm_id_t
The identifier for an alarm.
typedef int64_t(* alarm_callback_t)(alarm_id_t id, void *user_data)
User alarm callback.
4.2.11.5.4. Functions
void alarm_pool_init_default (void)
Create the default alarm pool (if not already created or disabled)
alarm_pool_t * alarm_pool_get_default (void)
The default alarm pool used when alarms are added without specifying an alarm pool, and also used by the SDK to
support lower power sleeps and timeouts.
static alarm_pool_t * alarm_pool_create (uint timer_alarm_num, uint max_timers)
Create an alarm pool.
static alarm_pool_t * alarm_pool_create_with_unused_hardware_alarm (uint max_timers)
Create an alarm pool, claiming an used timer_alarm to back it.
uint alarm_pool_timer_alarm_num (alarm_pool_t *pool)
Return the timer alarm used by an alarm pool.
uint alarm_pool_core_num (alarm_pool_t *pool)
Return the core number the alarm pool was initialized on (and hence callbacks are called on)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 386

void alarm_pool_destroy (alarm_pool_t *pool)
Destroy the alarm pool, cancelling all alarms and freeing up the underlying timer_alarm.
alarm_id_t alarm_pool_add_alarm_at (alarm_pool_t *pool, absolute_time_t time, alarm_callback_t callback, void *user_data,
bool fire_if_past)
Add an alarm callback to be called at a specific time.
alarm_id_t alarm_pool_add_alarm_at_force_in_context (alarm_pool_t *pool, absolute_time_t time, alarm_callback_t callback,
void *user_data)
Add an alarm callback to be called at or after a specific time.
static alarm_id_t alarm_pool_add_alarm_in_us (alarm_pool_t *pool, uint64_t us, alarm_callback_t callback, void
*user_data, bool fire_if_past)
Add an alarm callback to be called after a delay specified in microseconds.
static alarm_id_t alarm_pool_add_alarm_in_ms (alarm_pool_t *pool, uint32_t ms, alarm_callback_t callback, void
*user_data, bool fire_if_past)
Add an alarm callback to be called after a delay specified in milliseconds.
int64_t alarm_pool_remaining_alarm_time_us (alarm_pool_t *pool, alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
int32_t alarm_pool_remaining_alarm_time_ms (alarm_pool_t *pool, alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
bool alarm_pool_cancel_alarm (alarm_pool_t *pool, alarm_id_t alarm_id)
Cancel an alarm.
static alarm_id_t add_alarm_at (absolute_time_t time, alarm_callback_t callback, void *user_data, bool fire_if_past)
Add an alarm callback to be called at a specific time.
static alarm_id_t add_alarm_in_us (uint64_t us, alarm_callback_t callback, void *user_data, bool fire_if_past)
Add an alarm callback to be called after a delay specified in microseconds.
static alarm_id_t add_alarm_in_ms (uint32_t ms, alarm_callback_t callback, void *user_data, bool fire_if_past)
Add an alarm callback to be called after a delay specified in milliseconds.
static bool cancel_alarm (alarm_id_t alarm_id)
Cancel an alarm from the default alarm pool.
int64_t remaining_alarm_time_us (alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
int32_t remaining_alarm_time_ms (alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
4.2.11.5.5. Macro Definition Documentation
PICO_TIME_DEFAULT_ALARM_POOL_DISABLED
#define PICO_TIME_DEFAULT_ALARM_POOL_DISABLED 0
If 1 then the default alarm pool is disabled (so no timer_alarm is claimed for the pool)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 387

NOTE
Setting to 1 may cause some code not to compile as default timer pool related methods are removed
When the default alarm pool is disabled, _sleep methods and timeouts are no longer lower powered (they become
_busy_wait)
See also
PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM
alarm_pool_get_default()
PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM
#define PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM 3
Selects which timer_alarm is used for the default alarm pool.
See also
alarm_pool_get_default()
PICO_TIME_DEFAULT_ALARM_POOL_MAX_TIMERS
#define PICO_TIME_DEFAULT_ALARM_POOL_MAX_TIMERS 16
Selects the maximum number of concurrent timers in the default alarm pool.
NOTE
For implementation reasons this is limited to PICO_PHEAP_MAX_ENTRIES which defaults to 255
See also
PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM
alarm_pool_get_default()
4.2.11.5.6. Typedef Documentation
alarm_id_t
typedef int32_t alarm_id_t
The identifier for an alarm.
NOTE
this identifier is signed because <0 is used as an error condition when creating alarms
alarm ids may be reused, however for convenience the implementation makes an attempt to defer reusing as long
as possible. You should certainly expect it to be hundreds of ids before one is reused, although in most cases it is
more. Nonetheless care must still be taken when cancelling alarms or other functionality based on alarms when the
alarm may have expired, as eventually the alarm id may be reused for another alarm.
See also
pico_error_codes
alarm_callback_t
typedef int64_t(* alarm_callback_t) (alarm_id_t id, void *user_data)
User alarm callback.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 388

Parameters
id
the alarm_id as returned when the alarm was added
user_data
the user data passed when the alarm was added
Returns
<0 to reschedule the same alarm this many us from the time the alarm was previously scheduled to fire
Returns
>0 to reschedule the same alarm this many us from the time this method returns
Returns
0 to not reschedule the alarm
4.2.11.5.7. Function Documentation
add_alarm_at
static alarm_id_t add_alarm_at (absolute_time_t time, alarm_callback_t callback, void * user_data, bool fire_if_past)
[inline], [static]
Add an alarm callback to be called at a specific time.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core of the
default alarm pool (generally core 0). If the callback is in the past or happens before the alarm setup could be
completed, then this method will optionally call the callback itself and then return a return code to indicate that the
target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
time
the timestamp when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls before or during this call before the alarm can be set, then the
callback should be called during (by) this function instead
Returns
>0 the alarm id
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
add_alarm_in_ms
static alarm_id_t add_alarm_in_ms (uint32_t ms, alarm_callback_t callback, void * user_data, bool fire_if_past) [inline],
[static]
Add an alarm callback to be called after a delay specified in milliseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core of the
default alarm pool (generally core 0). If the callback is in the past or happens before the alarm setup could be
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 389

completed, then this method will optionally call the callback itself and then return a return code to indicate that the
target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
ms
the delay (from now) in milliseconds when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls during this call before the alarm can be set, then the callback
should be called during (by) this function instead
Returns
>0 the alarm id
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
add_alarm_in_us
static alarm_id_t add_alarm_in_us (uint64_t us, alarm_callback_t callback, void * user_data, bool fire_if_past) [inline],
[static]
Add an alarm callback to be called after a delay specified in microseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core of the
default alarm pool (generally core 0). If the callback is in the past or happens before the alarm setup could be
completed, then this method will optionally call the callback itself and then return a return code to indicate that the
target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
us
the delay (from now) in microseconds when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls during this call before the alarm can be set, then the callback
should be called during (by) this function instead
Returns
>0 the alarm id
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 390

alarm_pool_add_alarm_at
alarm_id_t alarm_pool_add_alarm_at (alarm_pool_t * pool, absolute_time_t time, alarm_callback_t callback, void *
user_data, bool fire_if_past)
Add an alarm callback to be called at a specific time.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm
pool was created on. If the callback is in the past or happens before the alarm setup could be completed, then this
method will optionally call the callback itself and then return a return code to indicate that the target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the callback (this determines which timer_alarm is used,
and which core calls the callback)
time
the timestamp when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls before or during this call before the alarm can be set, then the
callback should be called during (by) this function instead
Returns
>0 the alarm id for an active (at the time of return) alarm
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
alarm_pool_add_alarm_at_force_in_context
alarm_id_t alarm_pool_add_alarm_at_force_in_context (alarm_pool_t * pool, absolute_time_t time, alarm_callback_t
callback, void * user_data)
Add an alarm callback to be called at or after a specific time.
The callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm pool was
created on. Unlike alarm_pool_add_alarm_at, this method guarantees to call the callback from that core even if the time
is during this method call or in the past.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the callback (this determines which timer_alarm is used, and
which core calls the callback)
time
the timestamp when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
Returns
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 391

>0 the alarm id for an active (at the time of return) alarm
Returns
<0 if there were no alarm slots available, or other error occurred
alarm_pool_add_alarm_in_ms
static alarm_id_t alarm_pool_add_alarm_in_ms (alarm_pool_t * pool, uint32_t ms, alarm_callback_t callback, void *
user_data, bool fire_if_past) [inline], [static]
Add an alarm callback to be called after a delay specified in milliseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm
pool was created on. If the callback is in the past or happens before the alarm setup could be completed, then this
method will optionally call the callback itself and then return a return code to indicate that the target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the callback (this determines which timer_alarm is used,
and which core calls the callback)
ms
the delay (from now) in milliseconds when (after which) the callback should fire
callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls before or during this call before the alarm can be set, then the
callback should be called during (by) this function instead
Returns
>0 the alarm id
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
alarm_pool_add_alarm_in_us
static alarm_id_t alarm_pool_add_alarm_in_us (alarm_pool_t * pool, uint64_t us, alarm_callback_t callback, void *
user_data, bool fire_if_past) [inline], [static]
Add an alarm callback to be called after a delay specified in microseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm
pool was created on. If the callback is in the past or happens before the alarm setup could be completed, then this
method will optionally call the callback itself and then return a return code to indicate that the target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the callback (this determines which timer_alarm is used,
and which core calls the callback)
us
the delay (from now) in microseconds when (after which) the callback should fire
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 392

callback
the callback function
user_data
user data to pass to the callback function
fire_if_past
if true, and the alarm time falls during this call before the alarm can be set, then the callback
should be called during (by) this function instead
Returns
>0 the alarm id
Returns
0 if the alarm time passed before or during the call and fire_if_past was false
Returns
<0 if there were no alarm slots available, or other error occurred
alarm_pool_cancel_alarm
bool alarm_pool_cancel_alarm (alarm_pool_t * pool, alarm_id_t alarm_id)
Cancel an alarm.
Parameters
pool
the alarm_pool containing the alarm
alarm_id
the alarm
Returns
true if the alarm was cancelled, false if it didn’t exist
See also
alarm_id_t for a note on reuse of IDs
alarm_pool_core_num
uint alarm_pool_core_num (alarm_pool_t * pool)
Return the core number the alarm pool was initialized on (and hence callbacks are called on)
Parameters
pool
the pool
Returns
the core used by the pool
alarm_pool_create
static alarm_pool_t * alarm_pool_create (uint timer_alarm_num, uint max_timers) [inline], [static]
Create an alarm pool.
The alarm pool will call callbacks from an alarm IRQ Handler on the core of this function is called from.
In many situations there is never any need for anything other than the default alarm pool, however you might want to
create another if you want alarm callbacks on core 1 or require alarm pools of different priority (IRQ priority based
preemption of callbacks)
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 393

NOTE
This method will hard assert if the timer_alarm is already claimed.
Parameters
timer_alarm_num
the timer_alarm to use to back this pool
max_timers
the maximum number of timers
NOTE
For implementation reasons this is limited to PICO_PHEAP_MAX_ENTRIES which defaults to 255
See also
alarm_pool_get_default()
hardware_claiming
alarm_pool_create_with_unused_hardware_alarm
static alarm_pool_t * alarm_pool_create_with_unused_hardware_alarm (uint max_timers) [inline], [static]
Create an alarm pool, claiming an used timer_alarm to back it.
The alarm pool will call callbacks from an alarm IRQ Handler on the core of this function is called from.
In many situations there is never any need for anything other than the default alarm pool, however you might want to
create another if you want alarm callbacks on core 1 or require alarm pools of different priority (IRQ priority based
preemption of callbacks)
NOTE
This method will hard assert if the there is no free hardware to claim.
Parameters
max_timers
the maximum number of timers
NOTE
For implementation reasons this is limited to PICO_PHEAP_MAX_ENTRIES which defaults to 255
See also
alarm_pool_get_default()
hardware_claiming
alarm_pool_destroy
void alarm_pool_destroy (alarm_pool_t * pool)
Destroy the alarm pool, cancelling all alarms and freeing up the underlying timer_alarm.
Parameters
pool
the pool
alarm_pool_get_default
alarm_pool_t * alarm_pool_get_default (void)
The default alarm pool used when alarms are added without specifying an alarm pool, and also used by the SDK to
support lower power sleeps and timeouts.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 394

See also
PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM
alarm_pool_init_default
void alarm_pool_init_default (void)
Create the default alarm pool (if not already created or disabled)
alarm_pool_remaining_alarm_time_ms
int32_t alarm_pool_remaining_alarm_time_ms (alarm_pool_t * pool, alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
Parameters
pool
the alarm_pool containing the alarm
alarm_id
the alarm
Returns
>=0 the number of microseconds before the next trigger (INT32_MAX if the number of ms is higher than can be
represented0
Returns
<0 if either the given alarm is not in progress or it has passed
alarm_pool_remaining_alarm_time_us
int64_t alarm_pool_remaining_alarm_time_us (alarm_pool_t * pool, alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
Parameters
pool
the alarm_pool containing the alarm
alarm_id
the alarm
Returns
>=0 the number of microseconds before the next trigger
Returns
<0 if either the given alarm is not in progress or it has passed
alarm_pool_timer_alarm_num
uint alarm_pool_timer_alarm_num (alarm_pool_t * pool)
Return the timer alarm used by an alarm pool.
Parameters
pool
the pool
Returns
the timer_alarm used by the pool
cancel_alarm
static bool cancel_alarm (alarm_id_t alarm_id) [inline], [static]
Cancel an alarm from the default alarm pool.
Parameters
alarm_id
the alarm
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 395

Returns
true if the alarm was cancelled, false if it didn’t exist
See also
alarm_id_t for a note on reuse of IDs
remaining_alarm_time_ms
int32_t remaining_alarm_time_ms (alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
Parameters
alarm_id
the alarm
Returns
>=0 the number of microseconds before the next trigger (INT32_MAX if the number of ms is higher than can be
represented0
Returns
<0 if either the given alarm is not in progress or it has passed
remaining_alarm_time_us
int64_t remaining_alarm_time_us (alarm_id_t alarm_id)
Return the time remaining before the next trigger of an alarm.
Parameters
pool
the alarm_pool containing the alarm
alarm_id
the alarm
Returns
>=0 the number of microseconds before the next trigger
Returns
<0 if either the given alarm is not in progress or it has passed
4.2.11.6. repeating_timer
Repeating Timer functions for simple scheduling of repeated execution.
4.2.11.6.1. Detailed Description
NOTE
The regular alarm_ functionality can be used to make repeating alarms (by return non zero from the callback),
however these methods abstract that further (at the cost of a user structure to store the repeat delay in (which the
alarm framework does not have space for).
4.2.11.6.2. Typedefs
typedef bool(* repeating_timer_callback_t)(repeating_timer_t *rt)
Callback for a repeating timer.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 396

4.2.11.6.3. Functions
bool alarm_pool_add_repeating_timer_us (alarm_pool_t *pool, int64_t delay_us, repeating_timer_callback_t callback, void
*user_data, repeating_timer_t *out)
Add a repeating timer that is called repeatedly at the specified interval in microseconds.
static bool alarm_pool_add_repeating_timer_ms (alarm_pool_t *pool, int32_t delay_ms, repeating_timer_callback_t callback,
void *user_data, repeating_timer_t *out)
Add a repeating timer that is called repeatedly at the specified interval in milliseconds.
static bool add_repeating_timer_us (int64_t delay_us, repeating_timer_callback_t callback, void *user_data,
repeating_timer_t *out)
Add a repeating timer that is called repeatedly at the specified interval in microseconds.
static bool add_repeating_timer_ms (int32_t delay_ms, repeating_timer_callback_t callback, void *user_data,
repeating_timer_t *out)
Add a repeating timer that is called repeatedly at the specified interval in milliseconds.
bool cancel_repeating_timer (repeating_timer_t *timer)
Cancel a repeating timer.
4.2.11.6.4. Typedef Documentation
repeating_timer_callback_t
typedef bool(* repeating_timer_callback_t) (repeating_timer_t *rt)
Callback for a repeating timer.
Parameters
rt
repeating time structure containing information about the repeating time. user_data is of primary
important to the user
Returns
true to continue repeating, false to stop.
4.2.11.6.5. Function Documentation
add_repeating_timer_ms
static bool add_repeating_timer_ms (int32_t delay_ms, repeating_timer_callback_t callback, void * user_data,
repeating_timer_t * out) [inline], [static]
Add a repeating timer that is called repeatedly at the specified interval in milliseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core of the
default alarm pool (generally core 0). If the callback is in the past or happens before the alarm setup could be
completed, then this method will optionally call the callback itself and then return a return code to indicate that the
target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 397

delay_ms
the repeat delay in milliseconds; if >0 then this is the delay between one callback ending and the
next starting; if <0 then this is the negative of the time between the starts of the callbacks. The
value of 0 is treated as 1 microsecond
callback
the repeating timer callback function
user_data
user data to pass to store in the repeating_timer structure for use by the callback.
out
the pointer to the user owned structure to store the repeating timer info in. BEWARE this storage
location must outlive the repeating timer, so be careful of using stack space
Returns
false if there were no alarm slots available to create the timer, true otherwise.
add_repeating_timer_us
static bool add_repeating_timer_us (int64_t delay_us, repeating_timer_callback_t callback, void * user_data,
repeating_timer_t * out) [inline], [static]
Add a repeating timer that is called repeatedly at the specified interval in microseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core of the
default alarm pool (generally core 0). If the callback is in the past or happens before the alarm setup could be
completed, then this method will optionally call the callback itself and then return a return code to indicate that the
target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
delay_us
the repeat delay in microseconds; if >0 then this is the delay between one callback ending and the
next starting; if <0 then this is the negative of the time between the starts of the callbacks. The
value of 0 is treated as 1
callback
the repeating timer callback function
user_data
user data to pass to store in the repeating_timer structure for use by the callback.
out
the pointer to the user owned structure to store the repeating timer info in. BEWARE this storage
location must outlive the repeating timer, so be careful of using stack space
Returns
false if there were no alarm slots available to create the timer, true otherwise.
alarm_pool_add_repeating_timer_ms
static bool alarm_pool_add_repeating_timer_ms (alarm_pool_t * pool, int32_t delay_ms, repeating_timer_callback_t
callback, void * user_data, repeating_timer_t * out) [inline], [static]
Add a repeating timer that is called repeatedly at the specified interval in milliseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm
pool was created on. If the callback is in the past or happens before the alarm setup could be completed, then this
method will optionally call the callback itself and then return a return code to indicate that the target time has passed.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 398

NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the repeating timer (this determines which timer_alarm is used,
and which core calls the callback)
delay_ms
the repeat delay in milliseconds; if >0 then this is the delay between one callback ending and the
next starting; if <0 then this is the negative of the time between the starts of the callbacks. The
value of 0 is treated as 1 microsecond
callback
the repeating timer callback function
user_data
user data to pass to store in the repeating_timer structure for use by the callback.
out
the pointer to the user owned structure to store the repeating timer info in. BEWARE this storage
location must outlive the repeating timer, so be careful of using stack space
Returns
false if there were no alarm slots available to create the timer, true otherwise.
alarm_pool_add_repeating_timer_us
bool alarm_pool_add_repeating_timer_us (alarm_pool_t * pool, int64_t delay_us, repeating_timer_callback_t callback, void
* user_data, repeating_timer_t * out)
Add a repeating timer that is called repeatedly at the specified interval in microseconds.
Generally the callback is called as soon as possible after the time specified from an IRQ handler on the core the alarm
pool was created on. If the callback is in the past or happens before the alarm setup could be completed, then this
method will optionally call the callback itself and then return a return code to indicate that the target time has passed.
NOTE
It is safe to call this method from an IRQ handler (including alarm callbacks), and from either core.
Parameters
pool
the alarm pool to use for scheduling the repeating timer (this determines which timer_alarm is used,
and which core calls the callback)
delay_us
the repeat delay in microseconds; if >0 then this is the delay between one callback ending and the
next starting; if <0 then this is the negative of the time between the starts of the callbacks. The
value of 0 is treated as 1
callback
the repeating timer callback function
user_data
user data to pass to store in the repeating_timer structure for use by the callback.
out
the pointer to the user owned structure to store the repeating timer info in. BEWARE this storage
location must outlive the repeating timer, so be careful of using stack space
Returns
false if there were no alarm slots available to create the timer, true otherwise.
cancel_repeating_timer
bool cancel_repeating_timer (repeating_timer_t * timer)
Cancel a repeating timer.
Parameters
timer
the repeating timer to cancel
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 399

Returns
true if the repeating timer was cancelled, false if it didn’t exist
See also
alarm_id_t for a note on reuse of IDs
4.2.12. pico_unique_id
Unique device ID access API.
4.2.12.1. Detailed Description
RP2040 does not have an on-board unique identifier (all instances of RP2040 silicon are identical and have no
persistent state). However, RP2040 boots from serial NOR flash devices which have a 64-bit unique ID as a standard
feature, and there is a 1:1 association between RP2040 and flash, so this is suitable for use as a unique identifier for an
RP2040-based board.
This library injects a call to the flash_get_unique_id function from the hardware_flash library, to run before main, and
stores the result in a static location which can safely be accessed at any time via pico_get_unique_id().
This avoids some pitfalls of the hardware_flash API, which requires any flash-resident interrupt routines to be disabled
when called into.
4.2.12.2. Functions
void pico_get_unique_board_id (pico_unique_board_id_t *id_out)
Get unique ID.
void pico_get_unique_board_id_string (char *id_out, uint len)
Get unique ID in string format.
4.2.12.3. Function Documentation
4.2.12.3.1. pico_get_unique_board_id
void pico_get_unique_board_id (pico_unique_board_id_t * id_out)
Get unique ID.
Get the unique 64-bit device identifier which was retrieved from the external NOR flash device at boot.
On PICO_NO_FLASH builds the unique identifier is set to all 0xEE.
Parameters
id_out
a pointer to a pico_unique_board_id_t struct, to which the identifier will be written
4.2.12.3.2. pico_get_unique_board_id_string
void pico_get_unique_board_id_string (char * id_out, uint len)
Get unique ID in string format.
Get the unique 64-bit device identifier which was retrieved from the external NOR flash device at boot, formatted as an
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 400
ASCII hex string. Will always 0-terminate.
On PICO_NO_FLASH builds the unique identifier is set to all 0xEE.
Parameters
id_out
a pointer to a char buffer of size len, to which the identifier will be written
len
the size of id_out. For full serial, len >= 2 * PICO_UNIQUE_BOARD_ID_SIZE_BYTES + 1
4.2.13. pico_util
Useful data structures and utility functions.
4.2.13.1. Modules
datetime
Date/Time formatting.
pheap
Pairing Heap Implementation.
queue
Multi-core and IRQ safe queue implementation.
4.2.13.2. datetime
Date/Time formatting.
4.2.13.3. pheap
Pairing Heap Implementation.
4.2.13.3.1. Detailed Description
pheap defines a simple pairing heap. The implementation simply tracks array indexes, it is up to the user to provide
storage for heap entries and a comparison function.
NOTE
This class is not safe for concurrent usage. It should be externally protected. Furthermore if used concurrently, the
caller needs to protect around their use of the returned id. For example, ph_remove_and_free_head returns the id of
an element that is no longer in the heap. The user can still use this to look at the data in their companion array,
however obviously further operations on the heap may cause them to overwrite that data as the id may be reused on
subsequent operations
4.2.13.4. queue
Multi-core and IRQ safe queue implementation.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 401

4.2.13.4.1. Detailed Description
Note that this queue stores values of a specified size, and pushed values are copied into the queue
4.2.13.4.2. Functions
void queue_init_with_spinlock (queue_t *q, uint element_size, uint element_count, uint spinlock_num)
Initialise a queue with a specific spinlock for concurrency protection.
static void queue_init (queue_t *q, uint element_size, uint element_count)
Initialise a queue, allocating a (possibly shared) spinlock.
void queue_free (queue_t *q)
Destroy the specified queue.
static uint queue_get_level_unsafe (queue_t *q)
Unsafe check of level of the specified queue.
static uint queue_get_level (queue_t *q)
Check of level of the specified queue.
static bool queue_is_empty (queue_t *q)
Check if queue is empty.
static bool queue_is_full (queue_t *q)
Check if queue is full.
bool queue_try_add (queue_t *q, const void *data)
Non-blocking add value queue if not full.
bool queue_try_remove (queue_t *q, void *data)
Non-blocking removal of entry from the queue if non empty.
bool queue_try_peek (queue_t *q, void *data)
Non-blocking peek at the next item to be removed from the queue.
void queue_add_blocking (queue_t *q, const void *data)
Blocking add of value to queue.
void queue_remove_blocking (queue_t *q, void *data)
Blocking remove entry from queue.
void queue_peek_blocking (queue_t *q, void *data)
Blocking peek at next value to be removed from queue.
4.2.13.4.3. Function Documentation
queue_add_blocking
void queue_add_blocking (queue_t * q, const void * data)
Blocking add of value to queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to value to be copied into the queue
If the queue is full this function will block, until a removal happens on the queue
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 402

queue_free
void queue_free (queue_t * q)
Destroy the specified queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
Does not deallocate the queue_t structure itself.
queue_get_level
static uint queue_get_level (queue_t * q) [inline], [static]
Check of level of the specified queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
Returns
Number of entries in the queue
queue_get_level_unsafe
static uint queue_get_level_unsafe (queue_t * q) [inline], [static]
Unsafe check of level of the specified queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
Returns
Number of entries in the queue
This does not use the spinlock, so may return incorrect results if the spin lock is not externally locked
queue_init
static void queue_init (queue_t * q, uint element_size, uint element_count) [inline], [static]
Initialise a queue, allocating a (possibly shared) spinlock.
Parameters
q
Pointer to a queue_t structure, used as a handle
element_size
Size of each value in the queue
element_count
Maximum number of entries in the queue
queue_init_with_spinlock
void queue_init_with_spinlock (queue_t * q, uint element_size, uint element_count, uint spinlock_num)
Initialise a queue with a specific spinlock for concurrency protection.
Parameters
q
Pointer to a queue_t structure, used as a handle
element_size
Size of each value in the queue
element_count
Maximum number of entries in the queue
spinlock_num
The spin ID used to protect the queue
queue_is_empty
static bool queue_is_empty (queue_t * q) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 403

Check if queue is empty.
Parameters
q
Pointer to a queue_t structure, used as a handle
Returns
true if queue is empty, false otherwise
This function is interrupt and multicore safe.
queue_is_full
static bool queue_is_full (queue_t * q) [inline], [static]
Check if queue is full.
Parameters
q
Pointer to a queue_t structure, used as a handle
Returns
true if queue is full, false otherwise
This function is interrupt and multicore safe.
queue_peek_blocking
void queue_peek_blocking (queue_t * q, void * data)
Blocking peek at next value to be removed from queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to the location to receive the peeked value, or NULL if the data isn’t required
If the queue is empty function will block until a value is added
queue_remove_blocking
void queue_remove_blocking (queue_t * q, void * data)
Blocking remove entry from queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to the location to receive the removed value, or NULL if the data isn’t required
If the queue is empty this function will block until a value is added.
queue_try_add
bool queue_try_add (queue_t * q, const void * data)
Non-blocking add value queue if not full.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to value to be copied into the queue
Returns
true if the value was added
If the queue is full this function will return immediately with false, otherwise the data is copied into a new value added to
the queue, and this function will return true.
Raspberry Pi Pico-series C/C++ SDK
4.2. High Level APIs 404

queue_try_peek
bool queue_try_peek (queue_t * q, void * data)
Non-blocking peek at the next item to be removed from the queue.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to the location to receive the peeked value, or NULL if the data isn’t required
Returns
true if there was a value to peek
If the queue is not empty this function will return immediately with true with the peeked entry copied into the location
specified by the data parameter, otherwise the function will return false.
queue_try_remove
bool queue_try_remove (queue_t * q, void * data)
Non-blocking removal of entry from the queue if non empty.
Parameters
q
Pointer to a queue_t structure, used as a handle
data
Pointer to the location to receive the removed value, or NULL if the data isn’t required
Returns
true if a value was removed
If the queue is not empty function will copy the removed value into the location provided and return immediately with
true, otherwise the function will return immediately with false.
4.3. Third-party Libraries
Third party libraries for implementing high level functionality.
tinyusb_device TinyUSB Device-mode support for the RP2040. The TinyUSB documentation site can be found
here.
tinyusb_host TinyUSB Host-mode support for the RP2040.
4.3.1. tinyusb_device
TinyUSB Device-mode support for the RP2040. The TinyUSB documentation site can be found here.
4.3.2. tinyusb_host
TinyUSB Host-mode support for the RP2040.
4.4. Networking Libraries
Functions for implementing networking
Raspberry Pi Pico-series C/C++ SDK
4.3. Third-party Libraries 405

pico_btstack Integration/wrapper libraries for BTstack the documentation for which is here.
pico_lwip Integration/wrapper libraries for lwIP the documentation for which is here.
ÊÊÊÊpico_lwip_arch lwIP compiler adapters. This is not included by default in pico_lwip in case you wish to
implement your own.
ÊÊÊÊpico_lwip_freertos Glue library for integration lwIP in NO_SYS=0 mode with the SDK.
ÊÊÊÊpico_lwip_nosys Glue library for integration lwIP in NO_SYS=1 mode with the SDK.
pico_cyw43_driver A wrapper around the lower level cyw43_driver, that integrates it with pico_async_context for
handling background work.
ÊÊÊÊpico_btstack_cyw43 Low-level Bluetooth HCI support.
pico_cyw43_arch Architecture for integrating the CYW43 driver (for the wireless on Pico W) and lwIP (for TCP/IP
stack) into the SDK. It is also necessary for accessing the on-board LED on Pico W.
ÊÊÊÊcyw43_driver Driver used for Pico W wireless.
ÊÊÊÊÊÊÊÊcyw43_ll Low Level CYW43 driver interface.
4.4.1. pico_btstack
Integration/wrapper libraries for BTstack the documentation for which is here.
4.4.1.1. Detailed Description
A supplemental license for BTstack (in addition to the stock BTstack licensing terms) is provided here.
The pico_btstack_ble library adds the support needed for Bluetooth Low Energy (BLE). The pico_btstack_classic library
adds the support needed for Bluetooth Classic. You can link to either library individually, or to both libraries thus
enabling dual-mode support provided by BTstack.
To use BTstack you need to provide a btstack_config.h file in your source tree and add its location to your include path.
The BTstack configuration macros ENABLE_CLASSIC and ENABLE_BLE are defined for you when you link the
pico_btstack_classic and pico_btstack_ble libraries respectively, so you should not define them yourself.
For more details, see How to configure BTstack and the relevant pico-examples.
The follow libraries are provided for you to link.
•
pico_btstack_ble - Adds Bluetooth Low Energy (LE) support.
•
pico_btstack_classic - Adds Bluetooth Classic support.
•
pico_btstack_sbc_encoder - Adds Bluetooth Sub Band Coding (SBC) encoder support.
•
pico_btstack_sbc_decoder - Adds Bluetooth Sub Band Coding (SBC) decoder support.
•
pico_btstack_bnep_lwip - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using LwIP.
•
pico_btstack_bnep_lwip_sys_freertos - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using LwIP
with FreeRTOS for NO_SYS=0.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 406

NOTE
The CMake function pico_btstack_make_gatt_header can be used to run the BTstack compile_gatt tool to make a
GATT header file from a BTstack GATT file.
See also
pico_btstack_cyw43 in pico_cyw43_driver, which adds the cyw43 driver support needed for BTstack including BTstack
run loop support.
4.4.1.2. Functions
const hal_flash_bank_t * pico_flash_bank_instance (void)
Return the singleton BTstack HAL flash instance, used for non-volatile storage.
const btstack_run_loop_t * btstack_run_loop_async_context_get_instance (async_context_t *context)
Initialize and return the singleton BTstack run loop instance that integrates with the async_context API.
const btstack_chipset_t * btstack_chipset_cyw43_instance (void)
Return the singleton BTstack chipset CY43 API instance.
4.4.1.3. Function Documentation
4.4.1.3.1. btstack_chipset_cyw43_instance
const btstack_chipset_t * btstack_chipset_cyw43_instance (void)
Return the singleton BTstack chipset CY43 API instance.
4.4.1.3.2. btstack_run_loop_async_context_get_instance
const btstack_run_loop_t * btstack_run_loop_async_context_get_instance (async_context_t * context)
Initialize and return the singleton BTstack run loop instance that integrates with the async_context API.
Parameters
context
the async_context instance that provides the abstraction for handling asynchronous work.
Returns
the BTstack run loop instance
4.4.1.3.3. pico_flash_bank_instance
const hal_flash_bank_t * pico_flash_bank_instance (void)
Return the singleton BTstack HAL flash instance, used for non-volatile storage.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 407

NOTE
By default two sectors at the end of flash are used (see PICO_FLASH_BANK_STORAGE_OFFSET and PICO_FLASH_BANK_TOTAL_SIZE)
4.4.2. pico_lwip
Integration/wrapper libraries for lwIP the documentation for which is here.
4.4.2.1. Detailed Description
The main pico_lwip library itself aggregates the lwIP RAW API: pico_lwip_core, pico_lwip_core4, pico_lwip_core6,
pico_lwip_api, pico_lwip_netif, pico_lwip_sixlowpan and pico_lwip_ppp.
If you wish to run in NO_SYS=1 mode, then you can link pico_lwip along with pico_lwip_nosys.
If you wish to run in NO_SYS=0 mode, then you can link pico_lwip with (for instance) pico_lwip_freertos, and also link in
pico_lwip_api for the additional blocking/thread-safe APIs.
Additionally you must link in pico_lwip_arch unless you provide your own compiler bindings for lwIP.
Additional individual pieces of lwIP functionality are available à la cart, by linking any of the libraries below.
The following libraries are provided that contain exactly the equivalent lwIP functionality groups:
•
pico_lwip_core -
•
pico_lwip_core4 -
•
pico_lwip_core6 -
•
pico_lwip_netif -
•
pico_lwip_sixlowpan -
•
pico_lwip_ppp -
•
pico_lwip_api -
The following libraries are provided that contain exactly the equivalent lwIP application support:
•
pico_lwip_snmp -
•
pico_lwip_http -
•
pico_lwip_makefsdata -
•
pico_lwip_iperf -
•
pico_lwip_smtp -
•
pico_lwip_sntp -
•
pico_lwip_mdns -
•
pico_lwip_netbios -
•
pico_lwip_tftp -
•
pico_lwip_mbedtls -
•
pico_lwip_mqtt -
4.4.2.2. Modules
pico_lwip_arch
lwIP compiler adapters. This is not included by default in pico_lwip in case you wish to implement your own.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 408

pico_lwip_freertos
Glue library for integration lwIP in NO_SYS=0 mode with the SDK.
pico_lwip_nosys
Glue library for integration lwIP in NO_SYS=1 mode with the SDK.
4.4.2.3. pico_lwip_arch
lwIP compiler adapters. This is not included by default in pico_lwip in case you wish to implement your own.
4.4.2.4. pico_lwip_freertos
Glue library for integration lwIP in NO_SYS=0 mode with the SDK.
4.4.2.4.1. Detailed Description
Simple init and deinit are all that is required to hook up lwIP (with full blocking API support) via an async_context
instance
4.4.2.4.2. Functions
bool lwip_freertos_init (async_context_t *context)
Initializes lwIP (NO_SYS=0 mode) support support for FreeRTOS using the provided async_context.
void lwip_freertos_deinit (async_context_t *context)
De-initialize lwIP (NO_SYS=0 mode) support for FreeRTOS.
4.4.2.4.3. Function Documentation
lwip_freertos_deinit
void lwip_freertos_deinit (async_context_t * context)
De-initialize lwIP (NO_SYS=0 mode) support for FreeRTOS.
Note that since lwIP may only be initialized once, and doesn’t itself provide a shutdown mechanism, lwIP itself may still
consume resources.
It is however safe to call lwip_freertos_init again later.
Parameters
context
the async_context the lwip_freertos support was added to via lwip_freertos_init
lwip_freertos_init
bool lwip_freertos_init (async_context_t * context)
Initializes lwIP (NO_SYS=0 mode) support support for FreeRTOS using the provided async_context.
If the initialization succeeds, lwip_freertos_deinit() can be called to shutdown lwIP support
Parameters
context
the async_context instance that provides the abstraction for handling asynchronous work. Note in
general this would be an async_context_freertos instance, though it doesn’t have to be.
Returns
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 409

true if the initialization succeeded
4.4.2.5. pico_lwip_nosys
Glue library for integration lwIP in NO_SYS=1 mode with the SDK.
4.4.2.5.1. Detailed Description
Simple init and deinit are all that is required to hook up lwIP via an async_context instance.
4.4.2.5.2. Functions
bool lwip_nosys_init (async_context_t *context)
Initializes lwIP (NO_SYS=1 mode) support support using the provided async_context.
void lwip_nosys_deinit (async_context_t *context)
De-initialize lwIP (NO_SYS=1 mode) support.
4.4.2.5.3. Function Documentation
lwip_nosys_deinit
void lwip_nosys_deinit (async_context_t * context)
De-initialize lwIP (NO_SYS=1 mode) support.
Note that since lwIP may only be initialized once, and doesn’t itself provide a shutdown mechanism, lwIP itself may still
consume resources
It is however safe to call lwip_nosys_init again later.
Parameters
context
the async_context the lwip_nosys support was added to via lwip_nosys_init
lwip_nosys_init
bool lwip_nosys_init (async_context_t * context)
Initializes lwIP (NO_SYS=1 mode) support support using the provided async_context.
If the initialization succeeds, lwip_nosys_deinit() can be called to shutdown lwIP support
Parameters
context
the async_context instance that provides the abstraction for handling asynchronous work.
Returns
true if the initialization succeeded
4.4.3. pico_cyw43_driver
A wrapper around the lower level cyw43_driver, that integrates it with pico_async_context for handling background
work.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 410

4.4.3.1. Modules
pico_btstack_cyw43
Low-level Bluetooth HCI support.
4.4.3.2. Functions
const hci_transport_t * hci_transport_cyw43_instance (void)
Get the Bluetooth HCI transport instance for cyw43.
bool cyw43_driver_init (struct async_context *context)
Initializes the lower level cyw43_driver and integrates it with the provided async_context.
void cyw43_driver_deinit (struct async_context *context)
De-initialize the lowever level cyw43_driver and unhooks it from the async_context.
4.4.3.3. Function Documentation
4.4.3.3.1. cyw43_driver_deinit
void cyw43_driver_deinit (struct async_context * context)
De-initialize the lowever level cyw43_driver and unhooks it from the async_context.
Parameters
context
the async_context the cyw43_driver support was added to via cyw43_driver_init
4.4.3.3.2. cyw43_driver_init
bool cyw43_driver_init (struct async_context * context)
Initializes the lower level cyw43_driver and integrates it with the provided async_context.
If the initialization succeeds, lwip_nosys_deinit() can be called to shutdown lwIP support
Parameters
context
the async_context instance that provides the abstraction for handling asynchronous work.
Returns
true if the initialization succeeded
4.4.3.3.3. hci_transport_cyw43_instance
const hci_transport_t * hci_transport_cyw43_instance (void)
Get the Bluetooth HCI transport instance for cyw43.
Returns
An instantiation of the hci_transport_t interface for the cyw43 chipset
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 411

4.4.3.4. pico_btstack_cyw43
Low-level Bluetooth HCI support.
4.4.3.4.1. Detailed Description
This library provides utility functions to initialise and de-initialise BTstack for CYW43,
4.4.4. pico_cyw43_arch
Architecture for integrating the CYW43 driver (for the wireless on Pico W) and lwIP (for TCP/IP stack) into the SDK. It is
also necessary for accessing the on-board LED on Pico W.
4.4.4.1. Detailed Description
Both the low level cyw43_driver and the lwIP stack require periodic servicing, and have limitations on whether they can be
called from multiple cores/threads.
pico_cyw43_arch attempts to abstract these complications into several behavioral groups:
•
'poll' - This not multi-core/IRQ safe, and requires the user to call cyw43_arch_poll periodically from their main loop
•
'thread_safe_background' - This is multi-core/thread/task safe, and maintenance of the driver and TCP/IP stack is
handled automatically in the background
•
'freertos' - This is multi-core/thread/task safe, and uses a separate FreeRTOS task to handle lwIP and and driver
work.
As of right now, lwIP is the only supported TCP/IP stack, however the use of pico_cyw43_arch is intended to be
independent of the particular TCP/IP stack used (and possibly Bluetooth stack used) in the future. For this reason, the
integration of lwIP is handled in the base (pico_cyw43_arch) library based on the #define CYW43_LWIP used by the
cyw43_driver.
NOTE
As of version 1.5.0 of the Raspberry Pi Pico SDK, the pico_cyw43_arch library no longer directly implements the distinct
behavioral abstractions. This is now handled by the more general pico_async_context library. The user facing
behavior of pico_cyw43_arch has not changed as a result of this implementation detail, however pico_cyw43_arch is
now just a thin wrapper which creates an appropriate async_context and makes a simple call to add lwIP or
cyw43_driver support as appropriate. You are free to perform this context creation and adding of lwIP, cyw43_driver
or indeed any other additional future protocol/driver support to your async_context, however for now
pico_cyw43_arch does still provide a few cyw43_ specific (i.e. Pico W) APIs for connection management, locking
and GPIO interaction.
The connection management APIs at least may be moved to a more generic library in a future release. The locking
methods are now backed by their pico_async_context equivalents, and those methods may be used interchangeably
(see cyw43_arch_lwip_begin, cyw43_arch_lwip_end and cyw43_arch_lwip_check for more details).
For examples of creating of your own async_context and addition of cyw43_driver and lwIP support, please refer to the
specific source files cyw43_arch_poll.c, cyw43_arch_threadsafe_background.c and cyw43_arch_freertos.c.
Whilst you can use the pico_cyw43_arch library directly and specify CYW43_LWIP (and other defines) yourself, several
other libraries are made available to the build which aggregate the defines and other dependencies for you:
•
pico_cyw43_arch_lwip_poll - For using the RAW lwIP API (in NO_SYS=1 mode) without any background processing or
multi-core/thread safety.
The user must call cyw43_arch_poll periodically from their main loop.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 412

This wrapper library:
◦
Sets CYW43_LWIP=1 to enable lwIP support in pico_cyw43_arch and cyw43_driver.
◦
Sets PICO_CYW43_ARCH_POLL=1 to select the polling behavior.
◦
Adds the pico_lwip as a dependency to pull in lwIP.
•
pico_cyw43_arch_lwip_threadsafe_background - For using the RAW lwIP API (in NO_SYS=1 mode) with multi-
core/thread safety, and automatic servicing of the cyw43_driver and lwIP in background.
Calls into the cyw43_driver high level API (cyw43.h) may be made from either core or from lwIP callbacks, however
calls into lwIP (which is not thread-safe) other than those made from lwIP callbacks, must be bracketed with
cyw43_arch_lwip_begin and cyw43_arch_lwip_end. It is fine to bracket calls made from within lwIP callbacks too;
you just don’t have to.
NOTE
lwIP callbacks happen in a (low priority) IRQ context (similar to an alarm callback), so care should be taken
when interacting with other code.
This wrapper library:
◦
Sets CYW43_LWIP=1 to enable lwIP support in pico_cyw43_arch and cyw43_driver
◦
Sets PICO_CYW43_ARCH_THREADSAFE_BACKGROUND=1 to select the thread-safe/non-polling behavior.
◦
Adds the pico_lwip as a dependency to pull in lwIP.
This library can also be used under the RP2040 port of FreeRTOS with lwIP in NO_SYS=1 mode (allowing you to call
cyw43_driver APIs from any task, and to call lwIP from lwIP callbacks, or from any task if you bracket the calls with
cyw43_arch_lwip_begin and cyw43_arch_lwip_end. Again, you should be careful about what you do in lwIP
callbacks, as you cannot call most FreeRTOS APIs from within an IRQ context. Unless you have good reason, you
should probably use the full FreeRTOS integration (with NO_SYS=0) provided by pico_cyw43_arch_lwip_sys_freertos.
•
pico_cyw43_arch_lwip_sys_freertos - For using the full lwIP API including blocking sockets in OS (NO_SYS=0) mode,
along with with multi-core/task/thread safety, and automatic servicing of the cyw43_driver and the lwIP stack.
This wrapper library:
◦
Sets CYW43_LWIP=1 to enable lwIP support in pico_cyw43_arch and cyw43_driver.
◦
Sets PICO_CYW43_ARCH_FREERTOS=1 to select the NO_SYS=0 lwip/FreeRTOS integration
◦
Sets LWIP_PROVIDE_ERRNO=1 to provide error numbers needed for compilation without an OS
◦
Adds the pico_lwip as a dependency to pull in lwIP.
◦
Adds the lwIP/FreeRTOS code from lwip-contrib (in the contrib directory of lwIP)
Calls into the cyw43_driver high level API (cyw43.h) may be made from any task or from lwIP callbacks, but not from
IRQs. Calls into the lwIP RAW API (which is not thread safe) must be bracketed with cyw43_arch_lwip_begin and
cyw43_arch_lwip_end. It is fine to bracket calls made from within lwIP callbacks too; you just don’t have to.
NOTE
this wrapper library requires you to link FreeRTOS functionality with your application yourself.
•
pico_cyw43_arch_none - If you do not need the TCP/IP stack but wish to use the on-board LED.
This wrapper library:
◦
Sets CYW43_LWIP=0 to disable lwIP support in pico_cyw43_arch and cyw43_driver
4.4.4.2. Modules
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 413

cyw43_driver
Driver used for Pico W wireless.
4.4.4.3. Functions
int cyw43_arch_init (void)
Initialize the CYW43 architecture.
int cyw43_arch_init_with_country (uint32_t country)
Initialize the CYW43 architecture for use in a specific country.
void cyw43_arch_deinit (void)
De-initialize the CYW43 architecture.
async_context_t * cyw43_arch_async_context (void)
Return the current async_context currently in use by the cyw43_arch code.
void cyw43_arch_set_async_context (async_context_t *context)
Set the async_context to be used by the cyw43_arch_init.
async_context_t * cyw43_arch_init_default_async_context (void)
Initialize the default async_context for the current cyw43_arch type.
void cyw43_arch_poll (void)
Perform any processing required by the cyw43_driver or the TCP/IP stack.
void cyw43_arch_wait_for_work_until (absolute_time_t until)
Sleep until there is cyw43_driver work to be done.
uint32_t cyw43_arch_get_country_code (void)
Return the country code used to initialize cyw43_arch.
void cyw43_arch_enable_sta_mode (void)
Enables Wi-Fi STA (Station) mode.
void cyw43_arch_disable_sta_mode (void)
Disables Wi-Fi STA (Station) mode.
void cyw43_arch_enable_ap_mode (const char *ssid, const char *password, uint32_t auth)
Enables Wi-Fi AP (Access point) mode.
void cyw43_arch_disable_ap_mode (void)
Disables Wi-Fi AP (Access point) mode.
int cyw43_arch_wifi_connect_blocking (const char *ssid, const char *pw, uint32_t auth)
Attempt to connect to a wireless access point, blocking until the network is joined or a failure is detected.
int cyw43_arch_wifi_connect_bssid_blocking (const char *ssid, const uint8_t *bssid, const char *pw, uint32_t auth)
Attempt to connect to a wireless access point specified by SSID and BSSID, blocking until the network is joined or a
failure is detected.
int cyw43_arch_wifi_connect_timeout_ms (const char *ssid, const char *pw, uint32_t auth, uint32_t timeout)
Attempt to connect to a wireless access point, blocking until the network is joined, a failure is detected or a timeout
occurs.
int cyw43_arch_wifi_connect_bssid_timeout_ms (const char *ssid, const uint8_t *bssid, const char *pw, uint32_t auth,
uint32_t timeout)
Attempt to connect to a wireless access point specified by SSID and BSSID, blocking until the network is joined, a
failure is detected or a timeout occurs.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 414

int cyw43_arch_wifi_connect_async (const char *ssid, const char *pw, uint32_t auth)
Start attempting to connect to a wireless access point.
int cyw43_arch_wifi_connect_bssid_async (const char *ssid, const uint8_t *bssid, const char *pw, uint32_t auth)
Start attempting to connect to a wireless access point specified by SSID and BSSID.
void cyw43_arch_gpio_put (uint wl_gpio, bool value)
Set a GPIO pin on the wireless chip to a given value.
bool cyw43_arch_gpio_get (uint wl_gpio)
Read the value of a GPIO pin on the wireless chip.
4.4.4.4. Function Documentation
4.4.4.4.1. cyw43_arch_async_context
async_context_t * cyw43_arch_async_context (void)
Return the current async_context currently in use by the cyw43_arch code.
Returns
the async_context.
4.4.4.4.2. cyw43_arch_deinit
void cyw43_arch_deinit (void)
De-initialize the CYW43 architecture.
This method de-initializes the cyw43_driver code and de-initializes the lwIP stack (if it was enabled at build time). Note
this method should always be called from the same core (or RTOS task, depending on the environment) as
cyw43_arch_init.
Additionally if the cyw43_arch is using its own async_context instance, then that instance is de-initialized.
4.4.4.4.3. cyw43_arch_disable_ap_mode
void cyw43_arch_disable_ap_mode (void)
Disables Wi-Fi AP (Access point) mode.
This Disbles the Wi-Fi in Access Point mode.
4.4.4.4.4. cyw43_arch_disable_sta_mode
void cyw43_arch_disable_sta_mode (void)
Disables Wi-Fi STA (Station) mode.
This disables the Wi-Fi in Station mode, disconnecting any active connection. You should subsequently check the status
by calling cyw43_wifi_link_status.
4.4.4.4.5. cyw43_arch_enable_ap_mode
void cyw43_arch_enable_ap_mode (const char * ssid, const char * password, uint32_t auth)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 415

Enables Wi-Fi AP (Access point) mode.
This enables the Wi-Fi in Access Point mode such that connections can be made to the device by other Wi-Fi clients
Parameters
ssid
the name for the access point
password
the password to use or NULL for no password.
auth
the authorization type to use when the password is enabled. Values are
CYW43_AUTH_WPA_TKIP_PSK, CYW43_AUTH_WPA2_AES_PSK, or
CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
4.4.4.4.6. cyw43_arch_enable_sta_mode
void cyw43_arch_enable_sta_mode (void)
Enables Wi-Fi STA (Station) mode.
This enables the Wi-Fi in Station mode such that connections can be made to other Wi-Fi Access Points
4.4.4.4.7. cyw43_arch_get_country_code
uint32_t cyw43_arch_get_country_code (void)
Return the country code used to initialize cyw43_arch.
Returns
the country code (see CYW43_COUNTRY_)
4.4.4.4.8. cyw43_arch_gpio_get
bool cyw43_arch_gpio_get (uint wl_gpio)
Read the value of a GPIO pin on the wireless chip.
NOTE
this method does not check for errors setting the GPIO. You can use the lower level cyw43_gpio_get instead if you
wish to check for errors.
Parameters
wl_gpio
the GPIO number on the wireless chip
Returns
true if the GPIO is high, false otherwise
4.4.4.4.9. cyw43_arch_gpio_put
void cyw43_arch_gpio_put (uint wl_gpio, bool value)
Set a GPIO pin on the wireless chip to a given value.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 416

NOTE
this method does not check for errors setting the GPIO. You can use the lower level cyw43_gpio_set instead if you
wish to check for errors.
Parameters
wl_gpio
the GPIO number on the wireless chip
value
true to set the GPIO, false to clear it.
4.4.4.4.10. cyw43_arch_init
int cyw43_arch_init (void)
Initialize the CYW43 architecture.
This method initializes the cyw43_driver code and initializes the lwIP stack (if it was enabled at build time). This method
must be called prior to using any other pico_cyw43_arch, cyw43_driver or lwIP functions.
NOTE
this method initializes wireless with a country code of PICO_CYW43_ARCH_DEFAULT_COUNTRY_CODE which defaults to
CYW43_COUNTRY_WORLDWIDE. Worldwide settings may not give the best performance; consider setting
PICO_CYW43_ARCH_DEFAULT_COUNTRY_CODE to a different value or calling cyw43_arch_init_with_country
By default this method initializes the cyw43_arch code’s own async_context by calling
cyw43_arch_init_default_async_context, however the user can specify use of their own async_context by calling
cyw43_arch_set_async_context() before calling this method
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.4.11. cyw43_arch_init_default_async_context
async_context_t * cyw43_arch_init_default_async_context (void)
Initialize the default async_context for the current cyw43_arch type.
This method initializes and returns a pointer to the static async_context associated with cyw43_arch. This method is
called by cyw43_arch_init automatically if a different async_context has not been set by cyw43_arch_set_async_context
Returns
the context or NULL if initialization failed.
4.4.4.4.12. cyw43_arch_init_with_country
int cyw43_arch_init_with_country (uint32_t country)
Initialize the CYW43 architecture for use in a specific country.
This method initializes the cyw43_driver code and initializes the lwIP stack (if it was enabled at build time). This method
must be called prior to using any other pico_cyw43_arch, cyw43_driver or lwIP functions.
By default this method initializes the cyw43_arch code’s own async_context by calling
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 417

cyw43_arch_init_default_async_context, however the user can specify use of their own async_context by calling
cyw43_arch_set_async_context() before calling this method
Parameters
country
the country code to use (see CYW43_COUNTRY_)
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.4.13. cyw43_arch_poll
void cyw43_arch_poll (void)
Perform any processing required by the cyw43_driver or the TCP/IP stack.
This method must be called periodically from the main loop when using a polling style pico_cyw43_arch (e.g.
pico_cyw43_arch_lwip_poll ). It may be called in other styles, but it is unnecessary to do so.
4.4.4.4.14. cyw43_arch_set_async_context
void cyw43_arch_set_async_context (async_context_t * context)
Set the async_context to be used by the cyw43_arch_init.
NOTE
This method must be called before calling cyw43_arch_init or cyw43_arch_init_with_country if you wish to use a
custom async_context instance.
Parameters
context
the async_context to be used
4.4.4.4.15. cyw43_arch_wait_for_work_until
void cyw43_arch_wait_for_work_until (absolute_time_t until)
Sleep until there is cyw43_driver work to be done.
This method may be called by code that is waiting for an event to come from the cyw43_driver, and has no work to do,
but would like to sleep without blocking any background work associated with the cyw43_driver.
Parameters
until
the time to wait until if there is no work to do.
4.4.4.4.16. cyw43_arch_wifi_connect_async
int cyw43_arch_wifi_connect_async (const char * ssid, const char * pw, uint32_t auth)
Start attempting to connect to a wireless access point.
This method tells the CYW43 driver to start connecting to an access point. You should subsequently check the status by
calling cyw43_wifi_link_status.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 418

ssid
the network name to connect to
pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are CYW43_AUTH_WPA_TKIP_PSK,
CYW43_AUTH_WPA2_AES_PSK, or CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
Returns
0 if the scan was started successfully, an error code otherwise
See also
pico_error_codes
4.4.4.4.17. cyw43_arch_wifi_connect_blocking
int cyw43_arch_wifi_connect_blocking (const char * ssid, const char * pw, uint32_t auth)
Attempt to connect to a wireless access point, blocking until the network is joined or a failure is detected.
Parameters
ssid
the network name to connect to
pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are CYW43_AUTH_WPA_TKIP_PSK,
CYW43_AUTH_WPA2_AES_PSK, or CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.4.18. cyw43_arch_wifi_connect_bssid_async
int cyw43_arch_wifi_connect_bssid_async (const char * ssid, const uint8_t * bssid, const char * pw, uint32_t auth)
Start attempting to connect to a wireless access point specified by SSID and BSSID.
This method tells the CYW43 driver to start connecting to an access point. You should subsequently check the status by
calling cyw43_wifi_link_status.
Parameters
ssid
the network name to connect to
bssid
the network BSSID to connect to or NULL if ignored
pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are CYW43_AUTH_WPA_TKIP_PSK,
CYW43_AUTH_WPA2_AES_PSK, or CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
Returns
0 if the scan was started successfully, an error code otherwise
See also
pico_error_codes
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 419

4.4.4.4.19. cyw43_arch_wifi_connect_bssid_blocking
int cyw43_arch_wifi_connect_bssid_blocking (const char * ssid, const uint8_t * bssid, const char * pw, uint32_t auth)
Attempt to connect to a wireless access point specified by SSID and BSSID, blocking until the network is joined or a
failure is detected.
Parameters
ssid
the network name to connect to
bssid
the network BSSID to connect to or NULL if ignored
pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are CYW43_AUTH_WPA_TKIP_PSK,
CYW43_AUTH_WPA2_AES_PSK, or CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.4.20. cyw43_arch_wifi_connect_bssid_timeout_ms
int cyw43_arch_wifi_connect_bssid_timeout_ms (const char * ssid, const uint8_t * bssid, const char * pw, uint32_t auth,
uint32_t timeout)
Attempt to connect to a wireless access point specified by SSID and BSSID, blocking until the network is joined, a failure
is detected or a timeout occurs.
Parameters
ssid
the network name to connect to
bssid
the network BSSID to connect to or NULL if ignored
pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are
CYW43_AUTH_WPA_TKIP_PSK, CYW43_AUTH_WPA2_AES_PSK, or
CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
timeout
how long to wait in milliseconds for a connection to succeed before giving up
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.4.21. cyw43_arch_wifi_connect_timeout_ms
int cyw43_arch_wifi_connect_timeout_ms (const char * ssid, const char * pw, uint32_t auth, uint32_t timeout)
Attempt to connect to a wireless access point, blocking until the network is joined, a failure is detected or a timeout
occurs.
Parameters
ssid
the network name to connect to
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 420

pw
the network password or NULL if there is no password required
auth
the authorization type to use when the password is enabled. Values are
CYW43_AUTH_WPA_TKIP_PSK, CYW43_AUTH_WPA2_AES_PSK, or
CYW43_AUTH_WPA2_MIXED_PSK (see CYW43_AUTH_)
timeout
how long to wait in milliseconds for a connection to succeed before giving up
Returns
0 if the initialization is successful, an error code otherwise
See also
pico_error_codes
4.4.4.5. cyw43_driver
Driver used for Pico W wireless.
4.4.4.5.1. Modules
cyw43_ll
Low Level CYW43 driver interface.
4.4.4.5.2. Macros
•
#define CYW43_DEFAULT_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 200, 1, 1, 10)
•
#define CYW43_AGGRESSIVE_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 2000, 1, 1, 10)
•
#define CYW43_PERFORMANCE_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 20, 1, 1, 1)
•
#define CYW43_COUNTRY(A, B, REV) ((unsigned char)(A) | ((unsigned char)(B) << 8) | ((REV) << 16))
4.4.4.5.3. Typedefs
typedef struct _cyw43_t cyw43_t
4.4.4.5.4. Functions
void cyw43_init (cyw43_t *self)
Initialize the driver.
void cyw43_deinit (cyw43_t *self)
Shut the driver down.
int cyw43_ioctl (cyw43_t *self, uint32_t cmd, size_t len, uint8_t *buf, uint32_t iface)
Send an ioctl command to cyw43.
int cyw43_send_ethernet (cyw43_t *self, int itf, size_t len, const void *buf, bool is_pbuf)
Send a raw ethernet packet.
int cyw43_wifi_pm (cyw43_t *self, uint32_t pm)
Set the wifi power management mode.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 421

int cyw43_wifi_get_pm (cyw43_t *self, uint32_t *pm)
Get the wifi power management mode.
int cyw43_wifi_link_status (cyw43_t *self, int itf)
Get the wifi link status.
void cyw43_wifi_set_up (cyw43_t *self, int itf, bool up, uint32_t country)
Set up and initialise wifi.
int cyw43_wifi_get_mac (cyw43_t *self, int itf, uint8_t mac[6])
Get the mac address of the device.
int cyw43_wifi_update_multicast_filter (cyw43_t *self, uint8_t *addr, bool add)
Add/remove multicast group address.
int cyw43_wifi_scan (cyw43_t *self, cyw43_wifi_scan_options_t *opts, void *env, int(*result_cb)(void *, const
cyw43_ev_scan_result_t *))
Perform a wifi scan for wifi networks.
static bool cyw43_wifi_scan_active (cyw43_t *self)
Determine if a wifi scan is in progress.
int cyw43_wifi_join (cyw43_t *self, size_t ssid_len, const uint8_t *ssid, size_t key_len, const uint8_t *key, uint32_t
auth_type, const uint8_t *bssid, uint32_t channel)
Connect or join a wifi network.
int cyw43_wifi_leave (cyw43_t *self, int itf)
Disassociate from a wifi network.
int cyw43_wifi_get_rssi (cyw43_t *self, int32_t *rssi)
Get the signal strength (RSSI) of the wifi network.
int cyw43_wifi_get_bssid (cyw43_t *self, uint8_t bssid[6])
Get the BSSID of the connected wifi network.
static void cyw43_wifi_ap_get_ssid (cyw43_t *self, size_t *len, const uint8_t **buf)
Get the ssid for the access point.
static uint32_t cyw43_wifi_ap_get_auth (cyw43_t *self)
Get the security authorisation used in AP mode.
static void cyw43_wifi_ap_set_channel (cyw43_t *self, uint32_t channel)
Set the the channel for the access point.
static void cyw43_wifi_ap_set_ssid (cyw43_t *self, size_t len, const uint8_t *buf)
Set the ssid for the access point.
static void cyw43_wifi_ap_set_password (cyw43_t *self, size_t len, const uint8_t *buf)
Set the password for the wifi access point.
static void cyw43_wifi_ap_set_auth (cyw43_t *self, uint32_t auth)
Set the security authorisation used in AP mode.
void cyw43_wifi_ap_get_max_stas (cyw43_t *self, int *max_stas)
Get the maximum number of devices (STAs) that can be associated with the wifi access point.
void cyw43_wifi_ap_get_stas (cyw43_t *self, int *num_stas, uint8_t *macs)
Get the number of devices (STAs) associated with the wifi access point.
static bool cyw43_is_initialized (cyw43_t *self)
Determines if the cyw43 driver been initialised.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 422

void cyw43_cb_tcpip_init (cyw43_t *self, int itf)
Initialise the IP stack.
void cyw43_cb_tcpip_deinit (cyw43_t *self, int itf)
Deinitialise the IP stack.
void cyw43_cb_tcpip_set_link_up (cyw43_t *self, int itf)
Notify the IP stack that the link is up.
void cyw43_cb_tcpip_set_link_down (cyw43_t *self, int itf)
Notify the IP stack that the link is down.
int cyw43_tcpip_link_status (cyw43_t *self, int itf)
Get the link status.
static uint32_t cyw43_pm_value (uint8_t pm_mode, uint16_t pm2_sleep_ret_ms, uint8_t li_beacon_period, uint8_t
li_dtim_period, uint8_t li_assoc)
Return a power management value to pass to cyw43_wifi_pm.
4.4.4.5.5. Variables
cyw43_t cyw43_state
void(* cyw43_poll)(void)
uint32_t cyw43_sleep
4.4.4.5.6. CYW43 driver version as components
Current version of the CYW43 driver as major/minor/micro components
CYW43_VERSION_MAJOR
#define CYW43_VERSION_MAJOR 1
CYW43_VERSION_MINOR
#define CYW43_VERSION_MINOR 0
CYW43_VERSION_MICRO
#define CYW43_VERSION_MICRO 3
4.4.4.5.7. CYW43 driver version
Combined CYW43 driver version as a 32-bit number
CYW43_VERSION
#define CYW43_VERSION (CYW43_VERSION_MAJOR << 16 | CYW43_VERSION_MINOR << 8 | CYW43_VERSION_MICRO)
4.4.4.5.8. Trace flags
CYW43_TRACE_ASYNC_EV
#define CYW43_TRACE_ASYNC_EV (0x0001)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 423

CYW43_TRACE_ETH_TX
#define CYW43_TRACE_ETH_TX (0x0002)
CYW43_TRACE_ETH_RX
#define CYW43_TRACE_ETH_RX (0x0004)
CYW43_TRACE_ETH_FULL
#define CYW43_TRACE_ETH_FULL (0x0008)
CYW43_TRACE_MAC
#define CYW43_TRACE_MAC (0x0010)
4.4.4.5.9. Link status
See also
status_name() to get a user readable name of the status for debug
cyw43_wifi_link_status() to get the wifi status
cyw43_tcpip_link_status() to get the overall link status
CYW43_LINK_DOWN
#define CYW43_LINK_DOWN (0)
link is down
CYW43_LINK_JOIN
#define CYW43_LINK_JOIN (1)
Connected to wifi.
CYW43_LINK_NOIP
#define CYW43_LINK_NOIP (2)
Connected to wifi, but no IP address.
CYW43_LINK_UP
#define CYW43_LINK_UP (3)
Connected to wifi with an IP address.
CYW43_LINK_FAIL
#define CYW43_LINK_FAIL (-1)
Connection failed.
CYW43_LINK_NONET
#define CYW43_LINK_NONET (-2)
No matching SSID found (could be out of range, or down)
CYW43_LINK_BADAUTH
#define CYW43_LINK_BADAUTH (-3)
Authenticatation failure
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 424

4.4.4.5.10. Country codes
CYW43_COUNTRY_WORLDWIDE
#define CYW43_COUNTRY_WORLDWIDE CYW43_COUNTRY('X', 'X', 0)
CYW43_COUNTRY_AUSTRALIA
#define CYW43_COUNTRY_AUSTRALIA CYW43_COUNTRY('A', 'U', 0)
CYW43_COUNTRY_AUSTRIA
#define CYW43_COUNTRY_AUSTRIA CYW43_COUNTRY('A', 'T', 0)
CYW43_COUNTRY_BELGIUM
#define CYW43_COUNTRY_BELGIUM CYW43_COUNTRY('B', 'E', 0)
CYW43_COUNTRY_BRAZIL
#define CYW43_COUNTRY_BRAZIL CYW43_COUNTRY('B', 'R', 0)
CYW43_COUNTRY_CANADA
#define CYW43_COUNTRY_CANADA CYW43_COUNTRY('C', 'A', 0)
CYW43_COUNTRY_CHILE
#define CYW43_COUNTRY_CHILE CYW43_COUNTRY('C', 'L', 0)
CYW43_COUNTRY_CHINA
#define CYW43_COUNTRY_CHINA CYW43_COUNTRY('C', 'N', 0)
CYW43_COUNTRY_COLOMBIA
#define CYW43_COUNTRY_COLOMBIA CYW43_COUNTRY('C', 'O', 0)
CYW43_COUNTRY_CZECH_REPUBLIC
#define CYW43_COUNTRY_CZECH_REPUBLIC CYW43_COUNTRY('C', 'Z', 0)
CYW43_COUNTRY_DENMARK
#define CYW43_COUNTRY_DENMARK CYW43_COUNTRY('D', 'K', 0)
CYW43_COUNTRY_ESTONIA
#define CYW43_COUNTRY_ESTONIA CYW43_COUNTRY('E', 'E', 0)
CYW43_COUNTRY_FINLAND
#define CYW43_COUNTRY_FINLAND CYW43_COUNTRY('F', 'I', 0)
CYW43_COUNTRY_FRANCE
#define CYW43_COUNTRY_FRANCE CYW43_COUNTRY('F', 'R', 0)
CYW43_COUNTRY_GERMANY
#define CYW43_COUNTRY_GERMANY CYW43_COUNTRY('D', 'E', 0)
CYW43_COUNTRY_GREECE
#define CYW43_COUNTRY_GREECE CYW43_COUNTRY('G', 'R', 0)
CYW43_COUNTRY_HONG_KONG
#define CYW43_COUNTRY_HONG_KONG CYW43_COUNTRY('H', 'K', 0)
CYW43_COUNTRY_HUNGARY
#define CYW43_COUNTRY_HUNGARY CYW43_COUNTRY('H', 'U', 0)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 425

CYW43_COUNTRY_ICELAND
#define CYW43_COUNTRY_ICELAND CYW43_COUNTRY('I', 'S', 0)
CYW43_COUNTRY_INDIA
#define CYW43_COUNTRY_INDIA CYW43_COUNTRY('I', 'N', 0)
CYW43_COUNTRY_ISRAEL
#define CYW43_COUNTRY_ISRAEL CYW43_COUNTRY('I', 'L', 0)
CYW43_COUNTRY_ITALY
#define CYW43_COUNTRY_ITALY CYW43_COUNTRY('I', 'T', 0)
CYW43_COUNTRY_JAPAN
#define CYW43_COUNTRY_JAPAN CYW43_COUNTRY('J', 'P', 0)
CYW43_COUNTRY_KENYA
#define CYW43_COUNTRY_KENYA CYW43_COUNTRY('K', 'E', 0)
CYW43_COUNTRY_LATVIA
#define CYW43_COUNTRY_LATVIA CYW43_COUNTRY('L', 'V', 0)
CYW43_COUNTRY_LIECHTENSTEIN
#define CYW43_COUNTRY_LIECHTENSTEIN CYW43_COUNTRY('L', 'I', 0)
CYW43_COUNTRY_LITHUANIA
#define CYW43_COUNTRY_LITHUANIA CYW43_COUNTRY('L', 'T', 0)
CYW43_COUNTRY_LUXEMBOURG
#define CYW43_COUNTRY_LUXEMBOURG CYW43_COUNTRY('L', 'U', 0)
CYW43_COUNTRY_MALAYSIA
#define CYW43_COUNTRY_MALAYSIA CYW43_COUNTRY('M', 'Y', 0)
CYW43_COUNTRY_MALTA
#define CYW43_COUNTRY_MALTA CYW43_COUNTRY('M', 'T', 0)
CYW43_COUNTRY_MEXICO
#define CYW43_COUNTRY_MEXICO CYW43_COUNTRY('M', 'X', 0)
CYW43_COUNTRY_NETHERLANDS
#define CYW43_COUNTRY_NETHERLANDS CYW43_COUNTRY('N', 'L', 0)
CYW43_COUNTRY_NEW_ZEALAND
#define CYW43_COUNTRY_NEW_ZEALAND CYW43_COUNTRY('N', 'Z', 0)
CYW43_COUNTRY_NIGERIA
#define CYW43_COUNTRY_NIGERIA CYW43_COUNTRY('N', 'G', 0)
CYW43_COUNTRY_NORWAY
#define CYW43_COUNTRY_NORWAY CYW43_COUNTRY('N', 'O', 0)
CYW43_COUNTRY_PERU
#define CYW43_COUNTRY_PERU CYW43_COUNTRY('P', 'E', 0)
CYW43_COUNTRY_PHILIPPINES
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 426

#define CYW43_COUNTRY_PHILIPPINES CYW43_COUNTRY('P', 'H', 0)
CYW43_COUNTRY_POLAND
#define CYW43_COUNTRY_POLAND CYW43_COUNTRY('P', 'L', 0)
CYW43_COUNTRY_PORTUGAL
#define CYW43_COUNTRY_PORTUGAL CYW43_COUNTRY('P', 'T', 0)
CYW43_COUNTRY_SINGAPORE
#define CYW43_COUNTRY_SINGAPORE CYW43_COUNTRY('S', 'G', 0)
CYW43_COUNTRY_SLOVAKIA
#define CYW43_COUNTRY_SLOVAKIA CYW43_COUNTRY('S', 'K', 0)
CYW43_COUNTRY_SLOVENIA
#define CYW43_COUNTRY_SLOVENIA CYW43_COUNTRY('S', 'I', 0)
CYW43_COUNTRY_SOUTH_AFRICA
#define CYW43_COUNTRY_SOUTH_AFRICA CYW43_COUNTRY('Z', 'A', 0)
CYW43_COUNTRY_SOUTH_KOREA
#define CYW43_COUNTRY_SOUTH_KOREA CYW43_COUNTRY('K', 'R', 0)
CYW43_COUNTRY_SPAIN
#define CYW43_COUNTRY_SPAIN CYW43_COUNTRY('E', 'S', 0)
CYW43_COUNTRY_SWEDEN
#define CYW43_COUNTRY_SWEDEN CYW43_COUNTRY('S', 'E', 0)
CYW43_COUNTRY_SWITZERLAND
#define CYW43_COUNTRY_SWITZERLAND CYW43_COUNTRY('C', 'H', 0)
CYW43_COUNTRY_TAIWAN
#define CYW43_COUNTRY_TAIWAN CYW43_COUNTRY('T', 'W', 0)
CYW43_COUNTRY_THAILAND
#define CYW43_COUNTRY_THAILAND CYW43_COUNTRY('T', 'H', 0)
CYW43_COUNTRY_TURKEY
#define CYW43_COUNTRY_TURKEY CYW43_COUNTRY('T', 'R', 0)
CYW43_COUNTRY_UK
#define CYW43_COUNTRY_UK CYW43_COUNTRY('G', 'B', 0)
CYW43_COUNTRY_USA
#define CYW43_COUNTRY_USA CYW43_COUNTRY('U', 'S', 0)
4.4.4.5.11. Macro Definition Documentation
CYW43_DEFAULT_PM
#define CYW43_DEFAULT_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 200, 1, 1, 10)
Default power management mode.
CYW43_AGGRESSIVE_PM
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 427

#define CYW43_AGGRESSIVE_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 2000, 1, 1, 10)
Aggressive power management mode for optimal power usage at the cost of performance.
CYW43_PERFORMANCE_PM
#define CYW43_PERFORMANCE_PM cyw43_pm_value(CYW43_PM2_POWERSAVE_MODE, 20, 1, 1, 1)
Performance power management mode where more power is used to increase performance.
CYW43_COUNTRY
#define CYW43_COUNTRY(A, B, REV) ((unsigned char)(A) | ((unsigned char)(B) << 8) | ((REV) << 16))
create a country code from the two character country and revision number
4.4.4.5.12. Typedef Documentation
cyw43_t
typedef struct _cyw43_t cyw43_t
4.4.4.5.13. Function Documentation
cyw43_cb_tcpip_deinit
void cyw43_cb_tcpip_deinit (cyw43_t * self, int itf)
Deinitialise the IP stack.
This method must be provided by the network stack interface It is called to close the IP stack and free resources.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface used, either CYW43_ITF_STA or CYW43_ITF_AP
cyw43_cb_tcpip_init
void cyw43_cb_tcpip_init (cyw43_t * self, int itf)
Initialise the IP stack.
This method must be provided by the network stack interface It is called to initialise the IP stack.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface used, either CYW43_ITF_STA or CYW43_ITF_AP
cyw43_cb_tcpip_set_link_down
void cyw43_cb_tcpip_set_link_down (cyw43_t * self, int itf)
Notify the IP stack that the link is down.
This method must be provided by the network stack interface It is called to notify the IP stack that the link is down.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface used, either CYW43_ITF_STA or CYW43_ITF_AP
cyw43_cb_tcpip_set_link_up
void cyw43_cb_tcpip_set_link_up (cyw43_t * self, int itf)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 428

Notify the IP stack that the link is up.
This method must be provided by the network stack interface It is called to notify the IP stack that the link is up. This
can, for example be used to request an IP address via DHCP.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface used, either CYW43_ITF_STA or CYW43_ITF_AP
cyw43_deinit
void cyw43_deinit (cyw43_t * self)
Shut the driver down.
This method will close the network interfaces, and free up resources
Parameters
self
the driver state object. This should always be &cyw43_state
cyw43_init
void cyw43_init (cyw43_t * self)
Initialize the driver.
This method must be called before using the driver
Parameters
self
the driver state object. This should always be &cyw43_state
cyw43_ioctl
int cyw43_ioctl (cyw43_t * self, uint32_t cmd, size_t len, uint8_t * buf, uint32_t iface)
Send an ioctl command to cyw43.
This method sends a command to cyw43.
Parameters
self
the driver state object. This should always be &cyw43_state
cmd
the command to send
len
the amount of data to send with the command
buf
a buffer containing the data to send
iface
the interface to use, either CYW43_ITF_STA or CYW43_ITF_AP
Returns
0 on success
cyw43_is_initialized
static bool cyw43_is_initialized (cyw43_t * self) [inline], [static]
Determines if the cyw43 driver been initialised.
Returns true if the cyw43 driver has been initialised with a call to cyw43_init
Parameters
self
the driver state object. This should always be &cyw43_state
Returns
True if the cyw43 driver has been initialised
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 429

cyw43_pm_value
static uint32_t cyw43_pm_value (uint8_t pm_mode, uint16_t pm2_sleep_ret_ms, uint8_t li_beacon_period, uint8_t
li_dtim_period, uint8_t li_assoc) [inline], [static]
Return a power management value to pass to cyw43_wifi_pm.
Generate the power management (PM) value to pass to cyw43_wifi_pm
pm_mode Meaning
CYW43_NO_POWERSAVE_MODE No power saving
CYW43_PM1_POWERSAVE_MODE Aggressive power saving which reduces wifi throughput
CYW43_PM2_POWERSAVE_MODE Power saving with High throughput (preferred). Saves
power when there is no wifi activity for some time.
See also
CYW43_DEFAULT_PM
CYW43_AGGRESSIVE_PM
CYW43_PERFORMANCE_PM
Parameters
pm_mode
Power management mode
pm2_sleep_ret_ms
The maximum time to wait before going back to sleep for CYW43_PM2_POWERSAVE_MODE
mode. Value measured in milliseconds and must be between 10 and 2000ms and divisible
by 10
li_beacon_period
Wake period is measured in beacon periods
li_dtim_period
Wake interval measured in DTIMs. If this is set to 0, the wake interval is measured in beacon
periods
li_assoc
Wake interval sent to the access point
cyw43_send_ethernet
int cyw43_send_ethernet (cyw43_t * self, int itf, size_t len, const void * buf, bool is_pbuf)
Send a raw ethernet packet.
This method sends a raw ethernet packet.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
interface to use, either CYW43_ITF_STA or CYW43_ITF_AP
len
the amount of data to send
buf
the data to send
is_pbuf
true if buf points to an lwip struct pbuf
Returns
0 on success
cyw43_tcpip_link_status
int cyw43_tcpip_link_status (cyw43_t * self, int itf)
Get the link status.
Returns the status of the link which is a superset of the wifi link status returned by cyw43_wifi_link_status
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 430

NOTE
If the link status is negative it indicates an error
link status Meaning
CYW43_LINK_DOWN Wifi down
CYW43_LINK_JOIN Connected to wifi
CYW43_LINK_NOIP Connected to wifi, but no IP address
CYW43_LINK_UP Connect to wifi with an IP address
CYW43_LINK_FAIL Connection failed
CYW43_LINK_NONET No matching SSID found (could be out of range, or down)
CYW43_LINK_BADAUTH Authenticatation failure
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface for which to return the link status, should be CYW43_ITF_STA or CYW43_ITF_AP
Returns
A value representing the link status
cyw43_wifi_ap_get_auth
static uint32_t cyw43_wifi_ap_get_auth (cyw43_t * self) [inline], [static]
Get the security authorisation used in AP mode.
For access point (AP) mode, this method can be used to get the security authorisation mode.
Parameters
self
the driver state object. This should always be &cyw43_state
Returns
the current security authorisation mode for the access point
cyw43_wifi_ap_get_max_stas
void cyw43_wifi_ap_get_max_stas (cyw43_t * self, int * max_stas)
Get the maximum number of devices (STAs) that can be associated with the wifi access point.
For access point (AP) mode, this method can be used to get the maximum number of devices that can be connected to
the wifi access point.
Parameters
self
the driver state object. This should always be &cyw43_state
max_stas
Returns the maximum number of devices (STAs) that can be connected to the access point (set to 0
on error)
cyw43_wifi_ap_get_ssid
static void cyw43_wifi_ap_get_ssid (cyw43_t * self, size_t * len, const uint8_t ** buf) [inline], [static]
Get the ssid for the access point.
For access point (AP) mode, this method can be used to get the SSID name of the wifi access point.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 431

self
the driver state object. This should always be &cyw43_state
len
Returns the length of the AP SSID name
buf
Returns a pointer to an internal buffer containing the AP SSID name
cyw43_wifi_ap_get_stas
void cyw43_wifi_ap_get_stas (cyw43_t * self, int * num_stas, uint8_t * macs)
Get the number of devices (STAs) associated with the wifi access point.
For access point (AP) mode, this method can be used to get the number of devices and mac addresses of devices
connected to the wifi access point.
Parameters
self
the driver state object. This should always be &cyw43_state
num_stas
Caller must provide the number of MACs that will fit in the macs buffer; The supplied buffer should
have enough room for 6 bytes per MAC address. Returns the number of devices (STA) connected to
the access point.
macs
Returns up to num_stas MAC addresses of devices (STA) connected to the access point. Call
cyw43_wifi_ap_get_max_stas to determine how many mac addresses can be returned.
cyw43_wifi_ap_set_auth
static void cyw43_wifi_ap_set_auth (cyw43_t * self, uint32_t auth) [inline], [static]
Set the security authorisation used in AP mode.
For access point (AP) mode, this method can be used to set how access to the access point is authorised.
Auth mode Meaning
CYW43_AUTH_OPEN Use an open access point with no authorisation required
CYW43_AUTH_WPA_TKIP_PSK Use WPA authorisation
CYW43_AUTH_WPA2_AES_PSK Use WPA2 (preferred)
CYW43_AUTH_WPA2_MIXED_PSK Use WPA2/WPA mixed (currently treated the same as
CYW43_AUTH_WPA2_AES_PSK)
Parameters
self
the driver state object. This should always be &cyw43_state
auth
Auth mode for the access point
cyw43_wifi_ap_set_channel
static void cyw43_wifi_ap_set_channel (cyw43_t * self, uint32_t channel) [inline], [static]
Set the the channel for the access point.
For access point (AP) mode, this method can be used to set the channel used for the wifi access point.
Parameters
self
the driver state object. This should always be &cyw43_state
channel
Wifi channel to use for the wifi access point
cyw43_wifi_ap_set_password
static void cyw43_wifi_ap_set_password (cyw43_t * self, size_t len, const uint8_t * buf) [inline], [static]
Set the password for the wifi access point.
For access point (AP) mode, this method can be used to set the password for the wifi access point.
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 432

Parameters
self
the driver state object. This should always be &cyw43_state
len
The length of the AP password
buf
A buffer containing the AP password
cyw43_wifi_ap_set_ssid
static void cyw43_wifi_ap_set_ssid (cyw43_t * self, size_t len, const uint8_t * buf) [inline], [static]
Set the ssid for the access point.
For access point (AP) mode, this method can be used to set the SSID name of the wifi access point.
Parameters
self
the driver state object. This should always be &cyw43_state
len
The length of the AP SSID name
buf
A buffer containing the AP SSID name
cyw43_wifi_get_bssid
int cyw43_wifi_get_bssid (cyw43_t * self, uint8_t bssid)
Get the BSSID of the connected wifi network.
Parameters
self
the driver state object. This should always be &cyw43_state
bssid
a buffer to receive the BSSID
Returns
0 on success
cyw43_wifi_get_mac
int cyw43_wifi_get_mac (cyw43_t * self, int itf, uint8_t mac)
Get the mac address of the device.
This method returns the mac address of the interface.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface to use, either CYW43_ITF_STA or CYW43_ITF_AP
mac
a buffer to receive the mac address
Returns
0 on success
cyw43_wifi_get_pm
int cyw43_wifi_get_pm (cyw43_t * self, uint32_t * pm)
Get the wifi power management mode.
This method gets the power management mode used by cyw43. The value is expressed as an unsigned integer
0x00adbrrm where, m = pm_mode Power management mode rr = pm2_sleep_ret (in units of 10ms) b = li_beacon_period
d = li_dtim_period a = li_assoc
See also
cyw43_pm_value for an explanation of these values This should be called after cyw43_wifi_set_up
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 433

Parameters
self
the driver state object. This should always be &cyw43_state
pm
Power management value
Returns
0 on success
cyw43_wifi_get_rssi
int cyw43_wifi_get_rssi (cyw43_t * self, int32_t * rssi)
Get the signal strength (RSSI) of the wifi network.
For STA (client) mode, returns the signal strength or RSSI of the wifi network. An RSSI value of zero is returned if you
call this function before a network is connected.
Parameters
self
the driver state object. This should always be &cyw43_state
rssi
a pointer to which the returned RSSI value is stored.
Returns
0 on success
cyw43_wifi_join
int cyw43_wifi_join (cyw43_t * self, size_t ssid_len, const uint8_t * ssid, size_t key_len, const uint8_t * key, uint32_t
auth_type, const uint8_t * bssid, uint32_t channel)
Connect or join a wifi network.
Connect to a wifi network in STA (client) mode After success is returned, periodically call cyw43_wifi_link_status or
cyw43_tcpip_link_status, to query the status of the link. It can take a many seconds to connect to fully join a network.
NOTE
Call cyw43_wifi_leave to disassociate from a wifi network.
Parameters
self
the driver state object. This should always be &cyw43_state
ssid_len
the length of the wifi network name
ssid
A buffer containing the wifi network name
key_len
The length of the wifi password
key
A buffer containing the wifi password
auth_type
Auth type,
See also
CYW43_AUTH_
Parameters
bssid
the mac address of the access point to connect to. This can be NULL.
channel
Used to set the band of the connection. This is only used if bssid is non NULL.
Returns
0 on success
cyw43_wifi_leave
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 434

int cyw43_wifi_leave (cyw43_t * self, int itf)
Disassociate from a wifi network.
This method disassociates from a wifi network.
Parameters
self
the driver state object. This should always be &cyw43_state
itf
The interface to disconnect, either CYW43_ITF_STA or CYW43_ITF_AP
Returns
0 on success
cyw43_wifi_link_status
int cyw43_wifi_link_status (cyw43_t * self, int itf)
Get the wifi link status.
Returns the status of the wifi link.
link status Meaning
CYW43_LINK_DOWN Wifi down
CYW43_LINK_JOIN Connected to wifi
CYW43_LINK_FAIL Connection failed
CYW43_LINK_NONET No matching SSID found (could be out of range, or down)
CYW43_LINK_BADAUTH Authenticatation failure
NOTE
If the link status is negative it indicates an error The wifi link status for the interface CYW43_ITF_AP is always
CYW43_LINK_DOWN
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface to use, should be CYW43_ITF_STA or CYW43_ITF_AP
Returns
A integer value representing the link status
cyw43_wifi_pm
int cyw43_wifi_pm (cyw43_t * self, uint32_t pm)
Set the wifi power management mode.
This method sets the power management mode used by cyw43. This should be called after cyw43_wifi_set_up
See also
cyw43_pm_value
CYW43_DEFAULT_PM
CYW43_AGGRESSIVE_PM
CYW43_PERFORMANCE_PM
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 435
self
the driver state object. This should always be &cyw43_state
pm
Power management value
Returns
0 on success
cyw43_wifi_scan
int cyw43_wifi_scan (cyw43_t * self, cyw43_wifi_scan_options_t * opts, void * env, int(*)(void *, const
cyw43_ev_scan_result_t *) result_cb)
Perform a wifi scan for wifi networks.
Start a scan for wifi networks. Results are returned via the callback.
NOTE
The scan is complete when cyw43_wifi_scan_active return false
Parameters
self
the driver state object. This should always be &cyw43_state
opts
An instance of cyw43_wifi_scan_options_t. Values in here are currently ignored.
env
Pointer passed back in the callback
result_cb
Callback for wifi scan results, see cyw43_ev_scan_result_t
Returns
0 on success
cyw43_wifi_scan_active
static bool cyw43_wifi_scan_active (cyw43_t * self) [inline], [static]
Determine if a wifi scan is in progress.
This method tells you if the scan is still in progress
Parameters
self
the driver state object. This should always be &cyw43_state
Returns
true if a wifi scan is in progress
cyw43_wifi_set_up
void cyw43_wifi_set_up (cyw43_t * self, int itf, bool up, uint32_t country)
Set up and initialise wifi.
This method turns on wifi and sets the country for regulation purposes. The power management mode is initialised to
CYW43_DEFAULT_PM For CYW43_ITF_AP, the access point is enabled. For CYW43_ITF_STA, the TCP/IP stack is
reinitialised
Parameters
self
the driver state object. This should always be &cyw43_state
itf
the interface to use either CYW43_ITF_STA or CYW43_ITF_AP
up
true to enable the link. Set to false to disable AP mode. Setting the up parameter to false for
CYW43_ITF_STA is ignored.
country
the country code, see CYW43_COUNTRY_
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 436

cyw43_wifi_update_multicast_filter
int cyw43_wifi_update_multicast_filter (cyw43_t * self, uint8_t * addr, bool add)
Add/remove multicast group address.
This method adds/removes an address from the multicast filter, allowing frames sent to this group to be received
Parameters
self
the driver state object. This should always be &cyw43_state
addr
a buffer containing a group mac address
add
true to add the address, false to remove it
Returns
0 on success
4.4.4.5.14. Variable Documentation
cyw43_state
cyw43_t cyw43_state
cyw43_poll
void(* cyw43_poll) (void)
cyw43_sleep
uint32_t cyw43_sleep
4.4.4.5.15. cyw43_ll
Low Level CYW43 driver interface.
Macros
•
#define CYW43_IOCTL_GET_SSID (0x32)
•
#define CYW43_IOCTL_GET_CHANNEL (0x3a)
•
#define CYW43_IOCTL_SET_DISASSOC (0x69)
•
#define CYW43_IOCTL_GET_ANTDIV (0x7e)
•
#define CYW43_IOCTL_SET_ANTDIV (0x81)
•
#define CYW43_IOCTL_SET_MONITOR (0xd9)
•
#define CYW43_IOCTL_GET_RSSI (0xfe)
•
#define CYW43_IOCTL_GET_VAR (0x20c)
•
#define CYW43_IOCTL_SET_VAR (0x20f)
•
#define CYW43_EV_SET_SSID (0)
•
#define CYW43_EV_JOIN (1)
•
#define CYW43_EV_AUTH (3)
•
#define CYW43_EV_DEAUTH (5)
•
#define CYW43_EV_DEAUTH_IND (6)
•
#define CYW43_EV_ASSOC (7)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 437

•
#define CYW43_EV_DISASSOC (11)
•
#define CYW43_EV_DISASSOC_IND (12)
•
#define CYW43_EV_LINK (16)
•
#define CYW43_EV_PRUNE (23)
•
#define CYW43_EV_PSK_SUP (46)
•
#define CYW43_EV_ESCAN_RESULT (69)
•
#define CYW43_EV_CSA_COMPLETE_IND (80)
•
#define CYW43_EV_ASSOC_REQ_IE (87)
•
#define CYW43_EV_ASSOC_RESP_IE (88)
•
#define CYW43_STATUS_SUCCESS (0)
•
#define CYW43_STATUS_FAIL (1)
•
#define CYW43_STATUS_TIMEOUT (2)
•
#define CYW43_STATUS_NO_NETWORKS (3)
•
#define CYW43_STATUS_ABORT (4)
•
#define CYW43_STATUS_NO_ACK (5)
•
#define CYW43_STATUS_UNSOLICITED (6)
•
#define CYW43_STATUS_ATTEMPT (7)
•
#define CYW43_STATUS_PARTIAL (8)
•
#define CYW43_STATUS_NEWSCAN (9)
•
#define CYW43_STATUS_NEWASSOC (10)
•
#define CYW43_SUP_DISCONNECTED (0)
•
#define CYW43_SUP_CONNECTING (1)
•
#define CYW43_SUP_IDREQUIRED (2)
•
#define CYW43_SUP_AUTHENTICATING (3)
•
#define CYW43_SUP_AUTHENTICATED (4)
•
#define CYW43_SUP_KEYXCHANGE (5)
•
#define CYW43_SUP_KEYED (6)
•
#define CYW43_SUP_TIMEOUT (7)
•
#define CYW43_SUP_LAST_BASIC_STATE (8)
•
#define CYW43_SUP_KEYXCHANGE_WAIT_M1 CYW43_SUP_AUTHENTICATED
•
#define CYW43_SUP_KEYXCHANGE_PREP_M2 CYW43_SUP_KEYXCHANGE
•
#define CYW43_SUP_KEYXCHANGE_WAIT_M3 CYW43_SUP_LAST_BASIC_STATE
•
#define CYW43_SUP_KEYXCHANGE_PREP_M4 (9)
•
#define CYW43_SUP_KEYXCHANGE_WAIT_G1 (10)
•
#define CYW43_SUP_KEYXCHANGE_PREP_G2 (11)
•
#define CYW43_REASON_INITIAL_ASSOC (0)
•
#define CYW43_REASON_LOW_RSSI (1)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 438

•
#define CYW43_REASON_DEAUTH (2)
•
#define CYW43_REASON_DISASSOC (3)
•
#define CYW43_REASON_BCNS_LOST (4)
•
#define CYW43_REASON_FAST_ROAM_FAILED (5)
•
#define CYW43_REASON_DIRECTED_ROAM (6)
•
#define CYW43_REASON_TSPEC_REJECTED (7)
•
#define CYW43_REASON_BETTER_AP (8)
•
#define CYW43_REASON_PRUNE_ENCR_MISMATCH (1)
•
#define CYW43_REASON_PRUNE_BCAST_BSSID (2)
•
#define CYW43_REASON_PRUNE_MAC_DENY (3)
•
#define CYW43_REASON_PRUNE_MAC_NA (4)
•
#define CYW43_REASON_PRUNE_REG_PASSV (5)
•
#define CYW43_REASON_PRUNE_SPCT_MGMT (6)
•
#define CYW43_REASON_PRUNE_RADAR (7)
•
#define CYW43_REASON_RSN_MISMATCH (8)
•
#define CYW43_REASON_PRUNE_NO_COMMON_RATES (9)
•
#define CYW43_REASON_PRUNE_BASIC_RATES (10)
•
#define CYW43_REASON_PRUNE_CCXFAST_PREVAP (11)
•
#define CYW43_REASON_PRUNE_CIPHER_NA (12)
•
#define CYW43_REASON_PRUNE_KNOWN_STA (13)
•
#define CYW43_REASON_PRUNE_CCXFAST_DROAM (14)
•
#define CYW43_REASON_PRUNE_WDS_PEER (15)
•
#define CYW43_REASON_PRUNE_QBSS_LOAD (16)
•
#define CYW43_REASON_PRUNE_HOME_AP (17)
•
#define CYW43_REASON_PRUNE_AP_BLOCKED (18)
•
#define CYW43_REASON_PRUNE_NO_DIAG_SUPPORT (19)
•
#define CYW43_REASON_SUP_OTHER (0)
•
#define CYW43_REASON_SUP_DECRYPT_KEY_DATA (1)
•
#define CYW43_REASON_SUP_BAD_UCAST_WEP128 (2)
•
#define CYW43_REASON_SUP_BAD_UCAST_WEP40 (3)
•
#define CYW43_REASON_SUP_UNSUP_KEY_LEN (4)
•
#define CYW43_REASON_SUP_PW_KEY_CIPHER (5)
•
#define CYW43_REASON_SUP_MSG3_TOO_MANY_IE (6)
•
#define CYW43_REASON_SUP_MSG3_IE_MISMATCH (7)
•
#define CYW43_REASON_SUP_NO_INSTALL_FLAG (8)
•
#define CYW43_REASON_SUP_MSG3_NO_GTK (9)
•
#define CYW43_REASON_SUP_GRP_KEY_CIPHER (10)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 439

•
#define CYW43_REASON_SUP_GRP_MSG1_NO_GTK (11)
•
#define CYW43_REASON_SUP_GTK_DECRYPT_FAIL (12)
•
#define CYW43_REASON_SUP_SEND_FAIL (13)
•
#define CYW43_REASON_SUP_DEAUTH (14)
•
#define CYW43_REASON_SUP_WPA_PSK_TMO (15)
•
#define CYW43_NO_POWERSAVE_MODE (0)
•
#define CYW43_PM1_POWERSAVE_MODE (1)
•
#define CYW43_PM2_POWERSAVE_MODE (2)
•
#define CYW43_BUS_MAX_BLOCK_SIZE 16384
•
#define CYW43_BACKPLANE_READ_PAD_LEN_BYTES 0
•
#define CYW43_LL_STATE_SIZE_WORDS 526 + 5
•
#define CYW43_CHANNEL_NONE (0xffffffff)
Typedefs
typedef struct _cyw43_async_event_t cyw43_async_event_t
typedef struct _cyw43_ll_t cyw43_ll_t
Functions
void cyw43_ll_init (cyw43_ll_t *self, void *cb_data)
void cyw43_ll_deinit (cyw43_ll_t *self)
int cyw43_ll_bus_init (cyw43_ll_t *self, const uint8_t *mac)
void cyw43_ll_bus_sleep (cyw43_ll_t *self, bool can_sleep)
void cyw43_ll_process_packets (cyw43_ll_t *self)
int cyw43_ll_ioctl (cyw43_ll_t *self, uint32_t cmd, size_t len, uint8_t *buf, uint32_t iface)
int cyw43_ll_send_ethernet (cyw43_ll_t *self, int itf, size_t len, const void *buf, bool is_pbuf)
int cyw43_ll_wifi_on (cyw43_ll_t *self, uint32_t country)
int cyw43_ll_wifi_pm (cyw43_ll_t *self, uint32_t pm, uint32_t pm_sleep_ret, uint32_t li_bcn, uint32_t li_dtim, uint32_t
li_assoc)
int cyw43_ll_wifi_get_pm (cyw43_ll_t *self, uint32_t *pm, uint32_t *pm_sleep_ret, uint32_t *li_bcn, uint32_t *li_dtim,
uint32_t *li_assoc)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 440

int cyw43_ll_wifi_scan (cyw43_ll_t *self, cyw43_wifi_scan_options_t *opts)
int cyw43_ll_wifi_join (cyw43_ll_t *self, size_t ssid_len, const uint8_t *ssid, size_t key_len, const uint8_t *key,
uint32_t auth_type, const uint8_t *bssid, uint32_t channel)
void cyw43_ll_wifi_set_wpa_auth (cyw43_ll_t *self)
void cyw43_ll_wifi_rejoin (cyw43_ll_t *self)
int cyw43_ll_wifi_get_bssid (cyw43_ll_t *self_in, uint8_t *bssid)
int cyw43_ll_wifi_ap_init (cyw43_ll_t *self, size_t ssid_len, const uint8_t *ssid, uint32_t auth, size_t key_len, const
uint8_t *key, uint32_t channel)
int cyw43_ll_wifi_ap_set_up (cyw43_ll_t *self, bool up)
int cyw43_ll_wifi_ap_get_stas (cyw43_ll_t *self, int *num_stas, uint8_t *macs)
int cyw43_ll_wifi_get_mac (cyw43_ll_t *self_in, uint8_t *addr)
int cyw43_ll_wifi_update_multicast_filter (cyw43_ll_t *self_in, uint8_t *addr, bool add)
bool cyw43_ll_has_work (cyw43_ll_t *self)
bool cyw43_ll_bt_has_work (cyw43_ll_t *self)
int cyw43_cb_read_host_interrupt_pin (void *cb_data)
void cyw43_cb_ensure_awake (void *cb_data)
void cyw43_cb_process_async_event (void *cb_data, const cyw43_async_event_t *ev)
void cyw43_cb_process_ethernet (void *cb_data, int itf, size_t len, const uint8_t *buf)
void cyw43_ll_write_backplane_reg (cyw43_ll_t *self_in, uint32_t addr, uint32_t val)
uint32_t cyw43_ll_read_backplane_reg (cyw43_ll_t *self_in, uint32_t addr)
int cyw43_ll_write_backplane_mem (cyw43_ll_t *self_in, uint32_t addr, uint32_t len, const uint8_t *buf)
int cyw43_ll_read_backplane_mem (cyw43_ll_t *self_in, uint32_t addr, uint32_t len, uint8_t *buf)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 441

anonymous enum
anonymous enum
Network interface types .
Table 32. Enumerator
CYW43_ITF_STA
Client interface STA mode.
CYW43_ITF_AP
Access point (AP) interface mode.
cyw43_ev_scan_result_t
typedef struct _cyw43_ev_scan_result_t cyw43_ev_scan_result_t
Structure to return wifi scan results.
cyw43_wifi_scan_options_t
typedef struct _cyw43_wifi_scan_options_t cyw43_wifi_scan_options_t
wifi scan options passed to cyw43_wifi_scan
Authorization types
Used when setting up an access point, or connecting to an access point
CYW43_AUTH_OPEN
#define CYW43_AUTH_OPEN (0)
No authorisation required (open)
CYW43_AUTH_WPA_TKIP_PSK
#define CYW43_AUTH_WPA_TKIP_PSK (0x00200002)
WPA authorisation.
CYW43_AUTH_WPA2_AES_PSK
#define CYW43_AUTH_WPA2_AES_PSK (0x00400004)
WPA2 authorisation (preferred)
CYW43_AUTH_WPA2_MIXED_PSK
#define CYW43_AUTH_WPA2_MIXED_PSK (0x00400006)
WPA2/WPA mixed authorisation.
CYW43_AUTH_WPA3_SAE_AES_PSK
#define CYW43_AUTH_WPA3_SAE_AES_PSK (0x01000004)
WPA3 AES authorisation.
CYW43_AUTH_WPA3_WPA2_AES_PSK
#define CYW43_AUTH_WPA3_WPA2_AES_PSK (0x01400004)
WPA2/WPA3 authorisation
Macro Definition Documentation
CYW43_IOCTL_GET_SSID
#define CYW43_IOCTL_GET_SSID (0x32)
CYW43_IOCTL_GET_CHANNEL
#define CYW43_IOCTL_GET_CHANNEL (0x3a)
CYW43_IOCTL_SET_DISASSOC
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 442

#define CYW43_IOCTL_SET_DISASSOC (0x69)
CYW43_IOCTL_GET_ANTDIV
#define CYW43_IOCTL_GET_ANTDIV (0x7e)
CYW43_IOCTL_SET_ANTDIV
#define CYW43_IOCTL_SET_ANTDIV (0x81)
CYW43_IOCTL_SET_MONITOR
#define CYW43_IOCTL_SET_MONITOR (0xd9)
CYW43_IOCTL_GET_RSSI
#define CYW43_IOCTL_GET_RSSI (0xfe)
CYW43_IOCTL_GET_VAR
#define CYW43_IOCTL_GET_VAR (0x20c)
CYW43_IOCTL_SET_VAR
#define CYW43_IOCTL_SET_VAR (0x20f)
CYW43_EV_SET_SSID
#define CYW43_EV_SET_SSID (0)
CYW43_EV_JOIN
#define CYW43_EV_JOIN (1)
CYW43_EV_AUTH
#define CYW43_EV_AUTH (3)
CYW43_EV_DEAUTH
#define CYW43_EV_DEAUTH (5)
CYW43_EV_DEAUTH_IND
#define CYW43_EV_DEAUTH_IND (6)
CYW43_EV_ASSOC
#define CYW43_EV_ASSOC (7)
CYW43_EV_DISASSOC
#define CYW43_EV_DISASSOC (11)
CYW43_EV_DISASSOC_IND
#define CYW43_EV_DISASSOC_IND (12)
CYW43_EV_LINK
#define CYW43_EV_LINK (16)
CYW43_EV_PRUNE
#define CYW43_EV_PRUNE (23)
CYW43_EV_PSK_SUP
#define CYW43_EV_PSK_SUP (46)
CYW43_EV_ESCAN_RESULT
#define CYW43_EV_ESCAN_RESULT (69)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 443

CYW43_EV_CSA_COMPLETE_IND
#define CYW43_EV_CSA_COMPLETE_IND (80)
CYW43_EV_ASSOC_REQ_IE
#define CYW43_EV_ASSOC_REQ_IE (87)
CYW43_EV_ASSOC_RESP_IE
#define CYW43_EV_ASSOC_RESP_IE (88)
CYW43_STATUS_SUCCESS
#define CYW43_STATUS_SUCCESS (0)
CYW43_STATUS_FAIL
#define CYW43_STATUS_FAIL (1)
CYW43_STATUS_TIMEOUT
#define CYW43_STATUS_TIMEOUT (2)
CYW43_STATUS_NO_NETWORKS
#define CYW43_STATUS_NO_NETWORKS (3)
CYW43_STATUS_ABORT
#define CYW43_STATUS_ABORT (4)
CYW43_STATUS_NO_ACK
#define CYW43_STATUS_NO_ACK (5)
CYW43_STATUS_UNSOLICITED
#define CYW43_STATUS_UNSOLICITED (6)
CYW43_STATUS_ATTEMPT
#define CYW43_STATUS_ATTEMPT (7)
CYW43_STATUS_PARTIAL
#define CYW43_STATUS_PARTIAL (8)
CYW43_STATUS_NEWSCAN
#define CYW43_STATUS_NEWSCAN (9)
CYW43_STATUS_NEWASSOC
#define CYW43_STATUS_NEWASSOC (10)
CYW43_SUP_DISCONNECTED
#define CYW43_SUP_DISCONNECTED (0)
CYW43_SUP_CONNECTING
#define CYW43_SUP_CONNECTING (1)
CYW43_SUP_IDREQUIRED
#define CYW43_SUP_IDREQUIRED (2)
CYW43_SUP_AUTHENTICATING
#define CYW43_SUP_AUTHENTICATING (3)
CYW43_SUP_AUTHENTICATED
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 444

#define CYW43_SUP_AUTHENTICATED (4)
CYW43_SUP_KEYXCHANGE
#define CYW43_SUP_KEYXCHANGE (5)
CYW43_SUP_KEYED
#define CYW43_SUP_KEYED (6)
CYW43_SUP_TIMEOUT
#define CYW43_SUP_TIMEOUT (7)
CYW43_SUP_LAST_BASIC_STATE
#define CYW43_SUP_LAST_BASIC_STATE (8)
CYW43_SUP_KEYXCHANGE_WAIT_M1
#define CYW43_SUP_KEYXCHANGE_WAIT_M1 CYW43_SUP_AUTHENTICATED
CYW43_SUP_KEYXCHANGE_PREP_M2
#define CYW43_SUP_KEYXCHANGE_PREP_M2 CYW43_SUP_KEYXCHANGE
CYW43_SUP_KEYXCHANGE_WAIT_M3
#define CYW43_SUP_KEYXCHANGE_WAIT_M3 CYW43_SUP_LAST_BASIC_STATE
CYW43_SUP_KEYXCHANGE_PREP_M4
#define CYW43_SUP_KEYXCHANGE_PREP_M4 (9)
CYW43_SUP_KEYXCHANGE_WAIT_G1
#define CYW43_SUP_KEYXCHANGE_WAIT_G1 (10)
CYW43_SUP_KEYXCHANGE_PREP_G2
#define CYW43_SUP_KEYXCHANGE_PREP_G2 (11)
CYW43_REASON_INITIAL_ASSOC
#define CYW43_REASON_INITIAL_ASSOC (0)
CYW43_REASON_LOW_RSSI
#define CYW43_REASON_LOW_RSSI (1)
CYW43_REASON_DEAUTH
#define CYW43_REASON_DEAUTH (2)
CYW43_REASON_DISASSOC
#define CYW43_REASON_DISASSOC (3)
CYW43_REASON_BCNS_LOST
#define CYW43_REASON_BCNS_LOST (4)
CYW43_REASON_FAST_ROAM_FAILED
#define CYW43_REASON_FAST_ROAM_FAILED (5)
CYW43_REASON_DIRECTED_ROAM
#define CYW43_REASON_DIRECTED_ROAM (6)
CYW43_REASON_TSPEC_REJECTED
#define CYW43_REASON_TSPEC_REJECTED (7)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 445

CYW43_REASON_BETTER_AP
#define CYW43_REASON_BETTER_AP (8)
CYW43_REASON_PRUNE_ENCR_MISMATCH
#define CYW43_REASON_PRUNE_ENCR_MISMATCH (1)
CYW43_REASON_PRUNE_BCAST_BSSID
#define CYW43_REASON_PRUNE_BCAST_BSSID (2)
CYW43_REASON_PRUNE_MAC_DENY
#define CYW43_REASON_PRUNE_MAC_DENY (3)
CYW43_REASON_PRUNE_MAC_NA
#define CYW43_REASON_PRUNE_MAC_NA (4)
CYW43_REASON_PRUNE_REG_PASSV
#define CYW43_REASON_PRUNE_REG_PASSV (5)
CYW43_REASON_PRUNE_SPCT_MGMT
#define CYW43_REASON_PRUNE_SPCT_MGMT (6)
CYW43_REASON_PRUNE_RADAR
#define CYW43_REASON_PRUNE_RADAR (7)
CYW43_REASON_RSN_MISMATCH
#define CYW43_REASON_RSN_MISMATCH (8)
CYW43_REASON_PRUNE_NO_COMMON_RATES
#define CYW43_REASON_PRUNE_NO_COMMON_RATES (9)
CYW43_REASON_PRUNE_BASIC_RATES
#define CYW43_REASON_PRUNE_BASIC_RATES (10)
CYW43_REASON_PRUNE_CCXFAST_PREVAP
#define CYW43_REASON_PRUNE_CCXFAST_PREVAP (11)
CYW43_REASON_PRUNE_CIPHER_NA
#define CYW43_REASON_PRUNE_CIPHER_NA (12)
CYW43_REASON_PRUNE_KNOWN_STA
#define CYW43_REASON_PRUNE_KNOWN_STA (13)
CYW43_REASON_PRUNE_CCXFAST_DROAM
#define CYW43_REASON_PRUNE_CCXFAST_DROAM (14)
CYW43_REASON_PRUNE_WDS_PEER
#define CYW43_REASON_PRUNE_WDS_PEER (15)
CYW43_REASON_PRUNE_QBSS_LOAD
#define CYW43_REASON_PRUNE_QBSS_LOAD (16)
CYW43_REASON_PRUNE_HOME_AP
#define CYW43_REASON_PRUNE_HOME_AP (17)
CYW43_REASON_PRUNE_AP_BLOCKED
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 446

#define CYW43_REASON_PRUNE_AP_BLOCKED (18)
CYW43_REASON_PRUNE_NO_DIAG_SUPPORT
#define CYW43_REASON_PRUNE_NO_DIAG_SUPPORT (19)
CYW43_REASON_SUP_OTHER
#define CYW43_REASON_SUP_OTHER (0)
CYW43_REASON_SUP_DECRYPT_KEY_DATA
#define CYW43_REASON_SUP_DECRYPT_KEY_DATA (1)
CYW43_REASON_SUP_BAD_UCAST_WEP128
#define CYW43_REASON_SUP_BAD_UCAST_WEP128 (2)
CYW43_REASON_SUP_BAD_UCAST_WEP40
#define CYW43_REASON_SUP_BAD_UCAST_WEP40 (3)
CYW43_REASON_SUP_UNSUP_KEY_LEN
#define CYW43_REASON_SUP_UNSUP_KEY_LEN (4)
CYW43_REASON_SUP_PW_KEY_CIPHER
#define CYW43_REASON_SUP_PW_KEY_CIPHER (5)
CYW43_REASON_SUP_MSG3_TOO_MANY_IE
#define CYW43_REASON_SUP_MSG3_TOO_MANY_IE (6)
CYW43_REASON_SUP_MSG3_IE_MISMATCH
#define CYW43_REASON_SUP_MSG3_IE_MISMATCH (7)
CYW43_REASON_SUP_NO_INSTALL_FLAG
#define CYW43_REASON_SUP_NO_INSTALL_FLAG (8)
CYW43_REASON_SUP_MSG3_NO_GTK
#define CYW43_REASON_SUP_MSG3_NO_GTK (9)
CYW43_REASON_SUP_GRP_KEY_CIPHER
#define CYW43_REASON_SUP_GRP_KEY_CIPHER (10)
CYW43_REASON_SUP_GRP_MSG1_NO_GTK
#define CYW43_REASON_SUP_GRP_MSG1_NO_GTK (11)
CYW43_REASON_SUP_GTK_DECRYPT_FAIL
#define CYW43_REASON_SUP_GTK_DECRYPT_FAIL (12)
CYW43_REASON_SUP_SEND_FAIL
#define CYW43_REASON_SUP_SEND_FAIL (13)
CYW43_REASON_SUP_DEAUTH
#define CYW43_REASON_SUP_DEAUTH (14)
CYW43_REASON_SUP_WPA_PSK_TMO
#define CYW43_REASON_SUP_WPA_PSK_TMO (15)
CYW43_NO_POWERSAVE_MODE
#define CYW43_NO_POWERSAVE_MODE (0)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 447

Power save mode parameter passed to cyw43_ll_wifi_pm.
No Powersave mode
CYW43_PM1_POWERSAVE_MODE
#define CYW43_PM1_POWERSAVE_MODE (1)
Powersave mode on specified interface without regard for throughput reduction.
CYW43_PM2_POWERSAVE_MODE
#define CYW43_PM2_POWERSAVE_MODE (2)
Powersave mode on specified interface with High throughput.
CYW43_BUS_MAX_BLOCK_SIZE
#define CYW43_BUS_MAX_BLOCK_SIZE 16384
CYW43_BACKPLANE_READ_PAD_LEN_BYTES
#define CYW43_BACKPLANE_READ_PAD_LEN_BYTES 0
CYW43_LL_STATE_SIZE_WORDS
#define CYW43_LL_STATE_SIZE_WORDS 526 + 5
CYW43_CHANNEL_NONE
#define CYW43_CHANNEL_NONE (0xffffffff)
To indicate no specific channel when calling cyw43_ll_wifi_join with bssid specified.
No Channel specified (use the AP’s channel)
Typedef Documentation
cyw43_async_event_t
typedef struct _cyw43_async_event_t cyw43_async_event_t
cyw43_ll_t
typedef struct _cyw43_ll_t cyw43_ll_t
Function Documentation
cyw43_cb_ensure_awake
void cyw43_cb_ensure_awake (void * cb_data)
cyw43_cb_process_async_event
void cyw43_cb_process_async_event (void * cb_data, const cyw43_async_event_t * ev)
cyw43_cb_process_ethernet
void cyw43_cb_process_ethernet (void * cb_data, int itf, size_t len, const uint8_t * buf)
cyw43_cb_read_host_interrupt_pin
int cyw43_cb_read_host_interrupt_pin (void * cb_data)
cyw43_ll_bt_has_work
bool cyw43_ll_bt_has_work (cyw43_ll_t * self)
cyw43_ll_bus_init
int cyw43_ll_bus_init (cyw43_ll_t * self, const uint8_t * mac)
cyw43_ll_bus_sleep
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 448

void cyw43_ll_bus_sleep (cyw43_ll_t * self, bool can_sleep)
cyw43_ll_deinit
void cyw43_ll_deinit (cyw43_ll_t * self)
cyw43_ll_has_work
bool cyw43_ll_has_work (cyw43_ll_t * self)
cyw43_ll_init
void cyw43_ll_init (cyw43_ll_t * self, void * cb_data)
cyw43_ll_ioctl
int cyw43_ll_ioctl (cyw43_ll_t * self, uint32_t cmd, size_t len, uint8_t * buf, uint32_t iface)
cyw43_ll_process_packets
void cyw43_ll_process_packets (cyw43_ll_t * self)
cyw43_ll_read_backplane_mem
int cyw43_ll_read_backplane_mem (cyw43_ll_t * self_in, uint32_t addr, uint32_t len, uint8_t * buf)
cyw43_ll_read_backplane_reg
uint32_t cyw43_ll_read_backplane_reg (cyw43_ll_t * self_in, uint32_t addr)
cyw43_ll_send_ethernet
int cyw43_ll_send_ethernet (cyw43_ll_t * self, int itf, size_t len, const void * buf, bool is_pbuf)
cyw43_ll_wifi_ap_get_stas
int cyw43_ll_wifi_ap_get_stas (cyw43_ll_t * self, int * num_stas, uint8_t * macs)
cyw43_ll_wifi_ap_init
int cyw43_ll_wifi_ap_init (cyw43_ll_t * self, size_t ssid_len, const uint8_t * ssid, uint32_t auth, size_t key_len, const
uint8_t * key, uint32_t channel)
cyw43_ll_wifi_ap_set_up
int cyw43_ll_wifi_ap_set_up (cyw43_ll_t * self, bool up)
cyw43_ll_wifi_get_bssid
int cyw43_ll_wifi_get_bssid (cyw43_ll_t * self_in, uint8_t * bssid)
cyw43_ll_wifi_get_mac
int cyw43_ll_wifi_get_mac (cyw43_ll_t * self_in, uint8_t * addr)
cyw43_ll_wifi_get_pm
int cyw43_ll_wifi_get_pm (cyw43_ll_t * self, uint32_t * pm, uint32_t * pm_sleep_ret, uint32_t * li_bcn, uint32_t *
li_dtim, uint32_t * li_assoc)
cyw43_ll_wifi_join
int cyw43_ll_wifi_join (cyw43_ll_t * self, size_t ssid_len, const uint8_t * ssid, size_t key_len, const uint8_t * key,
uint32_t auth_type, const uint8_t * bssid, uint32_t channel)
cyw43_ll_wifi_on
int cyw43_ll_wifi_on (cyw43_ll_t * self, uint32_t country)
cyw43_ll_wifi_pm
int cyw43_ll_wifi_pm (cyw43_ll_t * self, uint32_t pm, uint32_t pm_sleep_ret, uint32_t li_bcn, uint32_t li_dtim, uint32_t
li_assoc)
Raspberry Pi Pico-series C/C++ SDK
4.4. Networking Libraries 449

cyw43_ll_wifi_rejoin
void cyw43_ll_wifi_rejoin (cyw43_ll_t * self)
cyw43_ll_wifi_scan
int cyw43_ll_wifi_scan (cyw43_ll_t * self, cyw43_wifi_scan_options_t * opts)
cyw43_ll_wifi_set_wpa_auth
void cyw43_ll_wifi_set_wpa_auth (cyw43_ll_t * self)
cyw43_ll_wifi_update_multicast_filter
int cyw43_ll_wifi_update_multicast_filter (cyw43_ll_t * self_in, uint8_t * addr, bool add)
cyw43_ll_write_backplane_mem
int cyw43_ll_write_backplane_mem (cyw43_ll_t * self_in, uint32_t addr, uint32_t len, const uint8_t * buf)
cyw43_ll_write_backplane_reg
void cyw43_ll_write_backplane_reg (cyw43_ll_t * self_in, uint32_t addr, uint32_t val)
4.5. Runtime Infrastructure
Libraries that are used to provide efficient implementation of certain language level and C library functions, as well as
CMake INTERFACE libraries abstracting the compilation and link steps in the SDK
boot_stage2 Second stage boot loaders responsible for setting up external flash.
pico_atomic Helper implementations for C11 atomics.
pico_base Core types and macros for the Raspberry Pi Pico SDK.
pico_binary_info Binary info is intended for embedding machine readable information with the binary in FLASH.
pico_bootrom Access to functions and data in the bootrom.
pico_bit_ops Optimized bit manipulation functions.
pico_cxx_options non-code library controlling C++ related compile options
pico_clib_interface Provides the necessary glue code required by the particular C/C++ runtime being used.
pico_crt0 Provides the default linker scripts and the program entry/exit point.
pico_divider Optimized 32 and 64 bit division functions accelerated by the RP2040 hardware divider.
pico_double Optimized double-precision floating point functions.
pico_float Optimized single-precision floating point functions.
pico_int64_ops Optimized replacement implementations of the compiler built-in 64 bit multiplication.
pico_malloc Multi-core safety for malloc, calloc and free.
pico_mem_ops Provides optimized replacement implementations of the compiler built-in memcpy, memset
and related functions.
pico_platform Macros and definitions (and functions when included by non assembly code) for the RP2
family device / architecture to provide a common abstraction over low level compiler /
platform specifics.
pico_runtime Basic runtime support for running pre-main initializers provided by other libraries.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 450

pico_runtime_init Main runtime initialization functions required to set up the runtime environment before
entering main.
pico_stdio Customized stdio support allowing for input and output from UART, USB, semi-hosting etc.
ÊÊÊÊpico_stdio_semihos
ting
Experimental support for stdout using RAM semihosting .
ÊÊÊÊpico_stdio_uart Support for stdin/stdout using UART .
ÊÊÊÊpico_stdio_rtt Support for stdin/stdout using SEGGER RTT .
ÊÊÊÊpico_stdio_usb Support for stdin/stdout over USB serial (CDC) .
pico_standard_binary_
info
Includes default information about the binary that can be displayed by picotool.
pico_standard_link Setup for link options for a standard SDK executable.
4.5.1. boot_stage2
Second stage boot loaders responsible for setting up external flash.
4.5.2. pico_atomic
Helper implementations for C11 atomics.
4.5.2.1. Detailed Description
On RP2040 a spin lock is used as protection for all atomic operations, since there is no C library support.
On RP2350 the C-library provides implementations for all 1-byte, 2-byte and 4-byte atomics using processor exclusive
operations. This library provides a spin-lock protected version for arbitrary-sized atomics (including 64-bit).
4.5.3. pico_base
Core types and macros for the Raspberry Pi Pico SDK.
4.5.3.1. Detailed Description
This header is intended to be included by all source code as it includes configuration headers and overrides in the
correct order
This header may be included by assembly code
4.5.3.2. Enumerations
enum pico_error_codes { PICO_OK = 0, PICO_ERROR_NONE = 0, PICO_ERROR_GENERIC = -1, PICO_ERROR_TIMEOUT = -2,
PICO_ERROR_NO_DATA = -3, PICO_ERROR_NOT_PERMITTED = -4, PICO_ERROR_INVALID_ARG = -5, PICO_ERROR_IO = -6,
PICO_ERROR_BADAUTH = -7, PICO_ERROR_CONNECT_FAILED = -8, PICO_ERROR_INSUFFICIENT_RESOURCES = -9,
PICO_ERROR_INVALID_ADDRESS = -10, PICO_ERROR_BAD_ALIGNMENT = -11, PICO_ERROR_INVALID_STATE = -12,
PICO_ERROR_BUFFER_TOO_SMALL = -13, PICO_ERROR_PRECONDITION_NOT_MET = -14, PICO_ERROR_MODIFIED_DATA = -15,
PICO_ERROR_INVALID_DATA = -16, PICO_ERROR_NOT_FOUND = -17, PICO_ERROR_UNSUPPORTED_MODIFICATION = -18,
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 451

PICO_ERROR_LOCK_REQUIRED = -19, PICO_ERROR_VERSION_MISMATCH = -20, PICO_ERROR_RESOURCE_IN_USE = -21 }
Common return codes from pico_sdk methods that return a status.
4.5.3.3. Enumeration Type Documentation
4.5.3.3.1. pico_error_codes
enum pico_error_codes
Common return codes from pico_sdk methods that return a status.
All PICO_ERROR_ values are negative so they can be returned from functions that also want to return a zero or positive
value on success.
Note these error codes may be returned via bootrom functions too.
Table 33. Enumerator
PICO_OK
No error; the operation succeeded.
PICO_ERROR_NONE
No error; the operation succeeded.
PICO_ERROR_GENERIC
An unspecified error occurred.
PICO_ERROR_TIMEOUT
The function failed due to timeout.
PICO_ERROR_NO_DATA
Attempt for example to read from an empty buffer/FIFO.
PICO_ERROR_NOT_PERMITTED
Permission violation e.g. write to read-only flash partition,
or security violation.
PICO_ERROR_INVALID_ARG
Argument is outside of range of supported values`.
PICO_ERROR_IO
An I/O error occurred.
PICO_ERROR_BADAUTH
The authorization failed due to bad credentials.
PICO_ERROR_CONNECT_FAILED
The connection failed.
PICO_ERROR_INSUFFICIENT_RESOURCES
Dynamic allocation of resources failed.
PICO_ERROR_INVALID_ADDRESS
Address argument was out-of-bounds or was determined
to be an address that the caller may not access.
PICO_ERROR_BAD_ALIGNMENT
Address was mis-aligned (usually not on word boundary)
PICO_ERROR_INVALID_STATE
Something happened or failed to happen in the past, and
consequently we (currently) can’t service the request.
PICO_ERROR_BUFFER_TOO_SMALL
A user-allocated buffer was too small to hold the result or
working state of this function.
PICO_ERROR_PRECONDITION_NOT_MET
The call failed because another function must be called
first.
PICO_ERROR_MODIFIED_DATA
Cached data was determined to be inconsistent with the
actual version of the data.
PICO_ERROR_INVALID_DATA
A data structure failed to validate.
PICO_ERROR_NOT_FOUND
Attempted to access something that does not exist; or, a
search failed.
PICO_ERROR_UNSUPPORTED_MODIFICATION
Write is impossible based on previous writes; e.g.
attempted to clear an OTP bit.
PICO_ERROR_LOCK_REQUIRED
A required lock is not owned.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 452

PICO_ERROR_VERSION_MISMATCH
A version mismatch occurred (e.g. trying to run PIO
version 1 code on RP2040)
PICO_ERROR_RESOURCE_IN_USE
The call could not proceed because requires resourcesw
were unavailable.
4.5.4. pico_binary_info
Binary info is intended for embedding machine readable information with the binary in FLASH.
4.5.4.1. Detailed Description
Example uses include:
•
Program identification / information
•
Pin layouts
•
Included features
•
Identifying flash regions used as block devices/storage
4.5.4.2. Macros
•
#define bi_decl(_decl) __bi_mark_enclosure _decl; __bi_decl(__bi_ptr_lineno_var_name, &__bi_lineno_var_name.core,
".binary_info.keep.", __used);
•
#define bi_decl_if_func_used(_decl) ({__bi_mark_enclosure _decl; __bi_decl(__bi_ptr_lineno_var_name,
&__bi_lineno_var_name.core, ".binary_info.", ); *(const volatile uint8_t *)&__bi_ptr_lineno_var_name;});
4.5.4.3. Macro Definition Documentation
4.5.4.3.1. bi_decl
#define bi_decl(_decl) __bi_mark_enclosure _decl; __bi_decl(__bi_ptr_lineno_var_name, &__bi_lineno_var_name.core,
".binary_info.keep.", __used);
Declare some binary information that will be included if the contain source file/line is compiled into the binary.
4.5.4.3.2. bi_decl_if_func_used
#define bi_decl_if_func_used(_decl) ({__bi_mark_enclosure _decl; __bi_decl(__bi_ptr_lineno_var_name,
&__bi_lineno_var_name.core, ".binary_info.", ); *(const volatile uint8_t *)&__bi_ptr_lineno_var_name;});
Declare some binary information that will be included if the function containing the decl is linked into the binary. The
SDK uses –gc-sections, so functions that are never called will be removed by the linker, and any associated binary
information declared this way will also be stripped.
4.5.5. pico_bootrom
Access to functions and data in the bootrom.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 453

4.5.5.1. Detailed Description
This header may be included by assembly code
4.5.5.2. Macros
•
#define ROM_TABLE_CODE(c1, c2) ((c1) | ((c2) << 8))
4.5.5.3. Functions
static uint32_t rom_table_code (uint8_t c1, uint8_t c2)
Return a bootrom lookup code based on two ASCII characters.
void * rom_func_lookup (uint32_t code)
Lookup a bootrom function by its code.
void * rom_data_lookup (uint32_t code)
Lookup a bootrom data address by its code.
bool rom_funcs_lookup (uint32_t *table, unsigned int count)
Helper function to lookup the addresses of multiple bootrom functions.
static __force_inline void * rom_func_lookup_inline (uint32_t code)
Lookup a bootrom function by code. This method is forcibly inlined into the caller for FLASH/RAM sensitive code
usage.
void rom_reset_usb_boot (uint32_t usb_activity_gpio_pin_mask, uint32_t disable_interface_mask)
Reboot the device into BOOTSEL mode.
static void rom_connect_internal_flash ()
Connect the SSI/QMI to the QSPI pads.
static void rom_flash_exit_xip ()
Return the QSPI device from its XIP state to a serial command state.
static void rom_flash_range_erase (uint32_t addr, size_t count, uint32_t block_size, uint8_t block_cmd)
Erase bytes in flash.
static void rom_flash_range_program (uint32_t addr, const uint8_t *data, size_t count)
Program bytes in flash.
static void rom_flash_flush_cache ()
Flush the XIP cache.
static void rom_flash_enter_cmd_xip ()
Configure the SSI/QMI with a standard command.
4.5.5.4. Macro Definition Documentation
4.5.5.4.1. ROM_TABLE_CODE
#define ROM_TABLE_CODE(c1, c2) ((c1) | ((c2) << 8))
Return a bootrom lookup code based on two ASCII characters.
These codes are uses to lookup data or function addresses in the bootrom
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 454

Parameters
c1
the first character
c2
the second character
Returns
the 'code' to use in rom_func_lookup() or rom_data_lookup()
4.5.5.5. Function Documentation
4.5.5.5.1. rom_connect_internal_flash
static void rom_connect_internal_flash [inline], [static]
Connect the SSI/QMI to the QSPI pads.
Restore all QSPI pad controls to their default state, and connect the SSI/QMI peripheral to the QSPI pads.
On RP2350 if a secondary flash chip select GPIO has been configured via OTP OTP_DATA_FLASH_DEVINFO, or by
writing to the runtime copy of FLASH_DEVINFO in bootram, then this bank 0 GPIO is also initialised and the QMI
peripheral is connected. Otherwise, bank 0 IOs are untouched.
4.5.5.5.2. rom_data_lookup
void * rom_data_lookup (uint32_t code)
Lookup a bootrom data address by its code.
Parameters
code
the code
Returns
a pointer to the data, or NULL if the code does not match any bootrom function
4.5.5.5.3. rom_flash_enter_cmd_xip
static void rom_flash_enter_cmd_xip [inline], [static]
Configure the SSI/QMI with a standard command.
Configure the SSI/QMI to generate a standard 03h serial read command, with 24 address bits, upon each XIP access.
This is a slow XIP configuration, but is widely supported. CLKDIV is set to 12 on RP2350. The debugger may call this
function to ensure that flash is readable following a program/erase operation.
Note that the same setup is performed by flash_exit_xip(), and the RP2350 flash program/erase functions do not leave
XIP in an inaccessible state, so calls to this function are largely redundant on RP2350. It is provided on RP2350 for
compatibility with RP2040.
4.5.5.5.4. rom_flash_exit_xip
static void rom_flash_exit_xip [inline], [static]
Return the QSPI device from its XIP state to a serial command state.
On RP2040, first set up the SSI for serial-mode operations, then issue the fixed XIP exit sequence described in Section
2.8.1.2 of the datasheet. Note that the bootrom code uses the IO forcing logic to drive the CS pin, which must be cleared
before returning the SSI to XIP mode (e.g. by a call to _flash_flush_cache). This function configures the SSI with a fixed
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 455

SCK clock divisor of /6.
On RP2350, Initialise the QMI for serial operations (direct mode), and also initialise a basic XIP mode, where the QMI will
perform 03h serial read commands at low speed (CLKDIV=12) in response to XIP reads.
Then, issue a sequence to the QSPI device on chip select 0, designed to return it from continuous read mode ("XIP
mode") and/or QPI mode to a state where it will accept serial commands. This is necessary after system reset to
restore the QSPI device to a known state, because resetting RP2350 does not reset attached QSPI devices. It is also
necessary when user code, having already performed some continuous-read-mode or QPI-mode accesses, wishes to
return the QSPI device to a state where it will accept the serial erase and programming commands issued by the
bootrom’s flash access functions.
If a GPIO for the secondary chip select is configured via FLASH_DEVINFO, then the XIP exit sequence is also issued to
chip select 1.
The QSPI device should be accessible for XIP reads after calling this function; the name flash_exit_xip refers to
returning the QSPI device from its XIP state to a serial command state.
4.5.5.5.5. rom_flash_flush_cache
static void rom_flash_flush_cache [inline], [static]
Flush the XIP cache.
Flush and enable the XIP cache. Also clears the IO forcing on QSPI CSn, so that the SSI can drive the flash chip select as
normal.
Flush the entire XIP cache, by issuing an invalidate by set/way maintenance operation to every cache line. This ensures
that flash program/erase operations are visible to subsequent cached XIP reads.
Note that this unpins pinned cache lines, which may interfere with cache-as-SRAM use of the XIP cache.
No other operations are performed.
4.5.5.5.6. rom_flash_range_erase
static void rom_flash_range_erase (uint32_t addr, size_t count, uint32_t block_size, uint8_t block_cmd) [inline],
[static]
Erase bytes in flash.
Erase count bytes, starting at addr (offset from start of flash). Optionally, pass a block erase command e.g. D8h block
erase, and the size of the block erased by this command - this function will use the larger block erase where possible,
for much higher erase speed. addr must be aligned to a 4096-byte sector, and count must be a multiple of 4096 bytes.
This is a low-level flash API, and no validation of the arguments is performed.
See rom_flash_op on RP2350 for a higher-level API which checks alignment, flash bounds and partition permissions,
and can transparently apply a runtime-to-storage address translation.
The QSPI device must be in a serial command state before calling this API, which can be achieved by calling
rom_connect_internal_flash() followed by rom_flash_exit_xip(). After the erase, the flash cache should be flushed via
rom_flash_flush_cache() to ensure the modified flash data is visible to cached XIP accesses.
Finally, the original XIP mode should be restored by copying the saved XIP setup function from bootram into SRAM, and
executing it: the bootrom provides a default function which restores the flash mode/clkdiv discovered during flash
scanning, and user programs can override this with their own XIP setup function.
For the duration of the erase operation, QMI is in direct mode and attempting to access XIP from DMA, the debugger or
the other core will return a bus fault. XIP becomes accessible again once the function returns.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 456

addr
the offset from start of flash to be erased
count
number of bytes to erase
block_size
optional size of block erased by block_cmd
block_cmd
optional block erase command e.g. D8h block erase
4.5.5.5.7. rom_flash_range_program
static void rom_flash_range_program (uint32_t addr, const uint8_t * data, size_t count) [inline], [static]
Program bytes in flash.
Program data to a range of flash addresses starting at addr (offset from the start of flash) and count bytes in size. addr
must be aligned to a 256-byte boundary, and count must be a multiple of 256.
This is a low-level flash API, and no validation of the arguments is performed.
See rom_flash_op on RP2350 for a higher-level API which checks alignment, flash bounds and partition permissions,
and can transparently apply a runtime-to-storage address translation.
The QSPI device must be in a serial command state before calling this API - see notes on rom_flash_range_erase
Parameters
addr
the offset from start of flash to be erased
data
buffer containing the data to be written
count
number of bytes to erase
4.5.5.5.8. rom_func_lookup
void * rom_func_lookup (uint32_t code)
Lookup a bootrom function by its code.
Parameters
code
the code
Returns
a pointer to the function, or NULL if the code does not match any bootrom function
4.5.5.5.9. rom_func_lookup_inline
static __force_inline void * rom_func_lookup_inline (uint32_t code) [static]
Lookup a bootrom function by code. This method is forcibly inlined into the caller for FLASH/RAM sensitive code usage.
Parameters
code
the code
Returns
a pointer to the function, or NULL if the code does not match any bootrom function
4.5.5.5.10. rom_funcs_lookup
bool rom_funcs_lookup (uint32_t * table, unsigned int count)
Helper function to lookup the addresses of multiple bootrom functions.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 457

This method looks up the 'codes' in the table, and convert each table entry to the looked up function pointer, if there is a
function for that code in the bootrom.
Parameters
table
an IN/OUT array, elements are codes on input, function pointers on success.
count
the number of elements in the table
Returns
true if all the codes were found, and converted to function pointers, false otherwise
4.5.5.5.11. rom_reset_usb_boot
void rom_reset_usb_boot (uint32_t usb_activity_gpio_pin_mask, uint32_t disable_interface_mask)
Reboot the device into BOOTSEL mode.
This function reboots the device into the BOOTSEL mode ('usb boot"). Facilities are provided to enable an "activity light"
via GPIO attached LED for the USB Mass Storage Device, and to limit the USB interfaces exposed.
Parameters
usb_activity_gpio_pin_mask
0 No pins are used as per a cold boot. Otherwise a single bit set indicating which
GPIO pin should be set to output and raised whenever there is mass storage
activity from the host.
disable_interface_mask
value to control exposed interfaces
•
0 To enable both interfaces (as per a cold boot)
•
1 To disable the USB Mass Storage Interface
•
2 To disable the USB PICOBOOT Interface
4.5.5.5.12. rom_table_code
static uint32_t rom_table_code (uint8_t c1, uint8_t c2) [inline], [static]
Return a bootrom lookup code based on two ASCII characters.
These codes are uses to lookup data or function addresses in the bootrom
Parameters
c1
the first character
c2
the second character
Returns
the 'code' to use in rom_func_lookup() or rom_data_lookup()
4.5.6. pico_bit_ops
Optimized bit manipulation functions.
4.5.6.1. Detailed Description
Additionally provides replacement implementations of the compiler built-ins __builtin_popcount, __builtin_clz and
__bulitin_ctz
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 458

4.5.6.2. Functions
uint32_t __rev (uint32_t bits)
Reverse the bits in a 32 bit word.
uint64_t __revll (uint64_t bits)
Reverse the bits in a 64 bit double word.
4.5.6.3. Function Documentation
4.5.6.3.1. __rev
uint32_t __rev (uint32_t bits)
Reverse the bits in a 32 bit word.
Parameters
bits
32 bit input
Returns
the 32 input bits reversed
4.5.6.3.2. __revll
uint64_t __revll (uint64_t bits)
Reverse the bits in a 64 bit double word.
Parameters
bits
64 bit input
Returns
the 64 input bits reversed
4.5.7. pico_cxx_options
non-code library controlling C++ related compile options
4.5.8. pico_clib_interface
Provides the necessary glue code required by the particular C/C++ runtime being used.
4.5.9. pico_crt0
Provides the default linker scripts and the program entry/exit point.
4.5.10. pico_divider
Optimized 32 and 64 bit division functions accelerated by the RP2040 hardware divider.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 459

4.5.10.1. Detailed Description
Additionally provides integration with the C / and % operators
4.5.10.2. Functions
int32_t div_s32s32 (int32_t a, int32_t b)
Integer divide of two signed 32-bit values.
static int32_t divmod_s32s32_rem (int32_t a, int32_t b, int32_t *rem)
Integer divide of two signed 32-bit values, with remainder.
divmod_result_t divmod_s32s32 (int32_t a, int32_t b)
Integer divide of two signed 32-bit values.
uint32_t div_u32u32 (uint32_t a, uint32_t b)
Integer divide of two unsigned 32-bit values.
static uint32_t divmod_u32u32_rem (uint32_t a, uint32_t b, uint32_t *rem)
Integer divide of two unsigned 32-bit values, with remainder.
divmod_result_t divmod_u32u32 (uint32_t a, uint32_t b)
Integer divide of two unsigned 32-bit values.
int64_t div_s64s64 (int64_t a, int64_t b)
Integer divide of two signed 64-bit values.
int64_t divmod_s64s64_rem (int64_t a, int64_t b, int64_t *rem)
Integer divide of two signed 64-bit values, with remainder.
int64_t divmod_s64s64 (int64_t a, int64_t b)
Integer divide of two signed 64-bit values.
uint64_t div_u64u64 (uint64_t a, uint64_t b)
Integer divide of two unsigned 64-bit values.
uint64_t divmod_u64u64_rem (uint64_t a, uint64_t b, uint64_t *rem)
Integer divide of two unsigned 64-bit values, with remainder.
uint64_t divmod_u64u64 (uint64_t a, uint64_t b)
Integer divide of two signed 64-bit values.
int32_t div_s32s32_unsafe (int32_t a, int32_t b)
Unsafe integer divide of two signed 32-bit values.
int32_t divmod_s32s32_rem_unsafe (int32_t a, int32_t b, int32_t *rem)
Unsafe integer divide of two signed 32-bit values, with remainder.
divmod_result_t divmod_s32s32_unsafe (int32_t a, int32_t b)
Unsafe integer divide of two unsigned 32-bit values.
uint32_t div_u32u32_unsafe (uint32_t a, uint32_t b)
Unsafe integer divide of two unsigned 32-bit values.
uint32_t divmod_u32u32_rem_unsafe (uint32_t a, uint32_t b, uint32_t *rem)
Unsafe integer divide of two unsigned 32-bit values, with remainder.
divmod_result_t divmod_u32u32_unsafe (uint32_t a, uint32_t b)
Unsafe integer divide of two unsigned 32-bit values.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 460

int64_t div_s64s64_unsafe (int64_t a, int64_t b)
Unsafe integer divide of two signed 64-bit values.
int64_t divmod_s64s64_rem_unsafe (int64_t a, int64_t b, int64_t *rem)
Unsafe integer divide of two signed 64-bit values, with remainder.
int64_t divmod_s64s64_unsafe (int64_t a, int64_t b)
Unsafe integer divide of two signed 64-bit values.
uint64_t div_u64u64_unsafe (uint64_t a, uint64_t b)
Unsafe integer divide of two unsigned 64-bit values.
uint64_t divmod_u64u64_rem_unsafe (uint64_t a, uint64_t b, uint64_t *rem)
Unsafe integer divide of two unsigned 64-bit values, with remainder.
uint64_t divmod_u64u64_unsafe (uint64_t a, uint64_t b)
Unsafe integer divide of two signed 64-bit values.
4.5.10.3. Function Documentation
4.5.10.3.1. div_s32s32
int32_t div_s32s32 (int32_t a, int32_t b)
Integer divide of two signed 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient
4.5.10.3.2. div_s32s32_unsafe
int32_t div_s32s32_unsafe (int32_t a, int32_t b)
Unsafe integer divide of two signed 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient
Do not use in interrupts
4.5.10.3.3. div_s64s64
int64_t div_s64s64 (int64_t a, int64_t b)
Integer divide of two signed 64-bit values.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 461

a
Dividend
b
Divisor
Returns
Quotient
4.5.10.3.4. div_s64s64_unsafe
int64_t div_s64s64_unsafe (int64_t a, int64_t b)
Unsafe integer divide of two signed 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
Quotient
Do not use in interrupts
4.5.10.3.5. div_u32u32
uint32_t div_u32u32 (uint32_t a, uint32_t b)
Integer divide of two unsigned 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
Quotient
4.5.10.3.6. div_u32u32_unsafe
uint32_t div_u32u32_unsafe (uint32_t a, uint32_t b)
Unsafe integer divide of two unsigned 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
Quotient
Do not use in interrupts
4.5.10.3.7. div_u64u64
uint64_t div_u64u64 (uint64_t a, uint64_t b)
Integer divide of two unsigned 64-bit values.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 462

Parameters
a
Dividend
b
Divisor
Returns
Quotient
4.5.10.3.8. div_u64u64_unsafe
uint64_t div_u64u64_unsafe (uint64_t a, uint64_t b)
Unsafe integer divide of two unsigned 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
Quotient
Do not use in interrupts
4.5.10.3.9. divmod_s32s32
divmod_result_t divmod_s32s32 (int32_t a, int32_t b)
Integer divide of two signed 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in low word/r0, remainder in high word/r1
4.5.10.3.10. divmod_s32s32_rem
static int32_t divmod_s32s32_rem (int32_t a, int32_t b, int32_t * rem) [inline], [static]
Integer divide of two signed 32-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
4.5.10.3.11. divmod_s32s32_rem_unsafe
int32_t divmod_s32s32_rem_unsafe (int32_t a, int32_t b, int32_t * rem)
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 463

Unsafe integer divide of two signed 32-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
Do not use in interrupts
4.5.10.3.12. divmod_s32s32_unsafe
divmod_result_t divmod_s32s32_unsafe (int32_t a, int32_t b)
Unsafe integer divide of two unsigned 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in low word/r0, remainder in high word/r1
Do not use in interrupts
4.5.10.3.13. divmod_s64s64
int64_t divmod_s64s64 (int64_t a, int64_t b)
Integer divide of two signed 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in result (r0,r1), remainder in regs (r2, r3)
4.5.10.3.14. divmod_s64s64_rem
int64_t divmod_s64s64_rem (int64_t a, int64_t b, int64_t * rem)
Integer divide of two signed 64-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 464

4.5.10.3.15. divmod_s64s64_rem_unsafe
int64_t divmod_s64s64_rem_unsafe (int64_t a, int64_t b, int64_t * rem)
Unsafe integer divide of two signed 64-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
Do not use in interrupts
4.5.10.3.16. divmod_s64s64_unsafe
int64_t divmod_s64s64_unsafe (int64_t a, int64_t b)
Unsafe integer divide of two signed 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in result (r0,r1), remainder in regs (r2, r3)
Do not use in interrupts
4.5.10.3.17. divmod_u32u32
divmod_result_t divmod_u32u32 (uint32_t a, uint32_t b)
Integer divide of two unsigned 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in low word/r0, remainder in high word/r1
4.5.10.3.18. divmod_u32u32_rem
static uint32_t divmod_u32u32_rem (uint32_t a, uint32_t b, uint32_t * rem) [inline], [static]
Integer divide of two unsigned 32-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 465

Returns
Quotient result of dividend/divisor
4.5.10.3.19. divmod_u32u32_rem_unsafe
uint32_t divmod_u32u32_rem_unsafe (uint32_t a, uint32_t b, uint32_t * rem)
Unsafe integer divide of two unsigned 32-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
Do not use in interrupts
4.5.10.3.20. divmod_u32u32_unsafe
divmod_result_t divmod_u32u32_unsafe (uint32_t a, uint32_t b)
Unsafe integer divide of two unsigned 32-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in low word/r0, remainder in high word/r1
Do not use in interrupts
4.5.10.3.21. divmod_u64u64
uint64_t divmod_u64u64 (uint64_t a, uint64_t b)
Integer divide of two signed 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in result (r0,r1), remainder in regs (r2, r3)
4.5.10.3.22. divmod_u64u64_rem
uint64_t divmod_u64u64_rem (uint64_t a, uint64_t b, uint64_t * rem)
Integer divide of two unsigned 64-bit values, with remainder.
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 466

a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
4.5.10.3.23. divmod_u64u64_rem_unsafe
uint64_t divmod_u64u64_rem_unsafe (uint64_t a, uint64_t b, uint64_t * rem)
Unsafe integer divide of two unsigned 64-bit values, with remainder.
Parameters
a
Dividend
b
Divisor
rem
The remainder of dividend/divisor
Returns
Quotient result of dividend/divisor
Do not use in interrupts
4.5.10.3.24. divmod_u64u64_unsafe
uint64_t divmod_u64u64_unsafe (uint64_t a, uint64_t b)
Unsafe integer divide of two signed 64-bit values.
Parameters
a
Dividend
b
Divisor
Returns
quotient in result (r0,r1), remainder in regs (r2, r3)
Do not use in interrupts
4.5.11. pico_double
Optimized double-precision floating point functions.
4.5.11.1. Detailed Description
(Replacement) optimized implementations are provided of the following compiler built-ins and math library functions:
•
__aeabi_dadd, __aeabi_ddiv, __aeabi_dmul, __aeabi_drsub, __aeabi_dsub, __aeabi_cdcmpeq, __aeabi_cdrcmple,
__aeabi_cdcmple, __aeabi_dcmpeq, __aeabi_dcmplt, __aeabi_dcmple, __aeabi_dcmpge, __aeabi_dcmpgt,
__aeabi_dcmpun, __aeabi_i2d, __aeabi_l2d, __aeabi_ui2d, __aeabi_ul2d, __aeabi_d2iz, __aeabi_d2lz, __aeabi_d2uiz,
__aeabi_d2ulz, __aeabi_d2f
•
sqrt, cos, sin, tan, atan2, exp, log, ldexp, copysign, trunc, floor, ceil, round, asin, acos, atan, sinh, cosh, tanh, asinh,
acosh, atanh, exp2, log2, exp10, log10, pow,, hypot, cbrt, fmod, drem, remainder, remquo, expm1, log1p, fma
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 467

•
powint, sincos (GNU extensions)
The following additional optimized functions are also provided:
•
int2double, uint2double, int642double, uint642double, fix2double, ufix2double, fix642double, ufix642double
•
double2fix, double2ufix, double2fix64, double2ufix64, double2int, double2uint, double2int64, double2uint64,
double2int_z, double2int64_z,
•
exp10, sincos, powint
On RP2350 the following additional functions are available; the _fast methods are faster but do not round correctly"
•
ddiv_fast, sqrt_fast
4.5.12. pico_float
Optimized single-precision floating point functions.
4.5.12.1. Detailed Description
(Replacement) optimized implementations are provided of the following compiler built-ins and math library functions:
•
__aeabi_fadd, __aeabi_fdiv, __aeabi_fmul, __aeabi_frsub, __aeabi_fsub, __aeabi_cfcmpeq, __aeabi_cfrcmple,
__aeabi_cfcmple, __aeabi_fcmpeq, __aeabi_fcmplt, __aeabi_fcmple, __aeabi_fcmpge, __aeabi_fcmpgt,
__aeabi_fcmpun, __aeabi_i2f, __aeabi_l2f, __aeabi_ui2f, __aeabi_ul2f, __aeabi_f2iz, __aeabi_f2lz, __aeabi_f2uiz,
__aeabi_f2ulz, __aeabi_f2d, sqrtf, cosf, sinf, tanf, atan2f, expf, logf
•
ldexpf, copysignf, truncf, floorf, ceilf, roundf, asinf, acosf, atanf, sinhf, coshf, tanhf, asinhf, acoshf, atanhf, exp2f,
log2f, exp10f, log10f, powf, hypotf, cbrtf, fmodf, dremf, remainderf, remquof, expm1f, log1pf, fmaf
•
powintf, sincosf (GNU extensions)
The following additional optimized functions are also provided:
•
int2float, uint2float, int642float, uint642float, fix2float, ufix2float, fix642float, ufix642float
•
float2fix, float2ufix, float2fix64, float2ufix64, float2int, float2uint, float2int64, float2uint64, float2int_z,
float2int64_z, float2uint_z, float2uint64_z
•
exp10f, sincosf, powintf
On RP2350 the following additional functions are available; the _fast methods are faster but do not round correctly
•
float2fix64_z, fdiv_fast, fsqrt_fast,
4.5.13. pico_int64_ops
Optimized replacement implementations of the compiler built-in 64 bit multiplication.
4.5.13.1. Detailed Description
This library does not provide any additional functions
4.5.14. pico_malloc
Multi-core safety for malloc, calloc and free.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 468

4.5.14.1. Detailed Description
This library does not provide any additional functions
4.5.15. pico_mem_ops
Provides optimized replacement implementations of the compiler built-in memcpy, memset and related functions.
4.5.15.1. Detailed Description
The functions include:
•
memset, memcpy
•
__aeabi_memset, __aeabi_memset4, __aeabi_memset8, __aeabi_memcpy, __aeabi_memcpy4, __aeabi_memcpy8
This library does not provide any additional functions
4.5.16. pico_platform
Macros and definitions (and functions when included by non assembly code) for the RP2 family device / architecture to
provide a common abstraction over low level compiler / platform specifics.
4.5.16.1. Detailed Description
Macros and definitions (and functions when included by non assembly code) to adapt for different compilers.
Macros and definitions for accessing the CPU registers.
This header may be included by assembly code
This header may be included by assembly code
This header may be included by assembly code
4.5.16.2. Macros
•
#define __fast_mul(a, b)
•
#define __isr
•
#define __force_inline __always_inline
•
#define count_of(a) (sizeof(a)/sizeof((a)[0]))
•
#define MAX(a, b) ((a)>(b)?(a):(b))
•
#define MIN(a, b) ((b)>(a)?(a):(b))
•
#define __check_type_compatible(type_a, type_b) static_assert(__builtin_types_compatible_p(type_a, type_b),
__STRING(type_a) " is not compatible with " __STRING(type_b));
•
#define __after_data(group) __attribute__((section(".after_data." group)))
•
#define __scratch_x(group) __attribute__((section(".scratch_x." group)))
•
#define __scratch_y(group) __attribute__((section(".scratch_y." group)))
•
#define __uninitialized_ram(group) __attribute__((section(".uninitialized_data." #group))) group
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 469
•
#define __in_flash(group) __attribute__((section(".flashdata." group)))
•
#define __no_inline_not_in_flash_func(func_name) __noinline __not_in_flash_func(func_name)
4.5.16.3. Functions
static __force_inline void tight_loop_contents (void)
No-op function for the body of tight loops.
static void busy_wait_at_least_cycles (uint32_t minimum_cycles)
Helper method to busy-wait for at least the given number of cycles.
static __force_inline void __breakpoint (void)
Execute a breakpoint instruction.
static __force_inline uint get_core_num (void)
Get the current core number.
static __force_inline uint __get_current_exception (void)
Get the current exception level on this core.
static __force_inline bool pico_processor_state_is_nonsecure (void)
Return true if executing in the NonSecure state (Arm-only)
uint8_t rp2350_chip_version (void)
Returns the RP2350 chip revision number.
static uint8_t rp2040_chip_version (void)
Returns the RP2040 chip revision number for compatibility.
static uint8_t rp2040_rom_version (void)
Returns the RP2040 rom version number.
static __force_inline int32_t __mul_instruction (int32_t a, int32_t b)
Multiply two integers using an assembly MUL instruction.
static __always_inline void __compiler_memory_barrier (void)
Ensure that the compiler does not move memory access across this method call.
void panic_unsupported (void)
Panics with the message "Unsupported".
void panic (const char *fmt,…)
Displays a panic message and halts execution.
4.5.16.4. Macro Definition Documentation
4.5.16.4.1. __fast_mul
#define __fast_mul(a, b) __builtin_choose_expr(__builtin_constant_p(b) &&
!__builtin_constant_p(a), \
Ê (__builtin_popcount(b) >= 2 ? __mul_instruction(a,b) : (a)*(b)), \
Ê (a)*(b))
multiply two integer values using the fastest method possible
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 470

Efficiently multiplies value a by possibly constant value b.
If b is known to be constant and not zero or a power of 2, then a mul instruction is used rather than gcc’s default which
is often a slow combination of shifts and adds. If b is a power of 2 then a single shift is of course preferable and will be
used
Parameters
a
the first operand
b
the second operand
Returns
a * b
4.5.16.4.2. __isr
#define __isr
Marker for an interrupt handler.
For example an IRQ handler function called my_interrupt_handler:
void __isr my_interrupt_handler(void) {
4.5.16.4.3. __force_inline
#define __force_inline __always_inline
Attribute to force inlining of a function regardless of optimization level.
For example my_function here will always be inlined:
int __force_inline my_function(int x) {
4.5.16.4.4. count_of
#define count_of(a) (sizeof(a)/sizeof((a)[0]))
Macro to determine the number of elements in an array.
4.5.16.4.5. MAX
#define MAX(a, b) ((a)>(b)?(a):(b))
Macro to return the maximum of two comparable values.
4.5.16.4.6. MIN
#define MIN(a, b) ((b)>(a)?(a):(b))
Macro to return the minimum of two comparable values.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 471

4.5.16.4.7. __check_type_compatible
#define __check_type_compatible(type_a, type_b) static_assert(__builtin_types_compatible_p(type_a, type_b),
__STRING(type_a) " is not compatible with " __STRING(type_b));
Utility macro to assert two types are equivalent.
This macro can be useful in other macros along with typeof to assert that two parameters are of equivalent type (or that
a single parameter is of an expected type)
4.5.16.4.8. __after_data
#define __after_data(group) __attribute__((section(".after_data." group)))
Section attribute macro for placement in RAM after the .data section.
For example a 400 element uint32_t array placed after the .data section
uint32_t __after_data("my_group_name") a_big_array[400];
The section attribute is .after_data.<group>
Parameters
group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
4.5.16.4.9. __scratch_x
#define __scratch_x(group) __attribute__((section(".scratch_x." group)))
Section attribute macro for placement not in flash (i.e in RAM)
For example a 3 element uint32_t array placed in RAM (even though it is static const)
static const uint32_t __not_in_flash("my_group_name") an_array[3];
The section attribute is .time_critical.<group>
Parameters
group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
Section attribute macro for placement in the SRAM bank 4 (known as "scratch X")
Scratch X is commonly used for critical data and functions accessed only by one core (when only one core is accessing
the RAM bank, there is no opportunity for stalls)
For example a uint32_t variable placed in "scratch X"
uint32_t __scratch_x("my_group_name") foo = 23;
The section attribute is .scratch_x.<group>
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 472

group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
4.5.16.4.10. __scratch_y
#define __scratch_y(group) __attribute__((section(".scratch_y." group)))
Section attribute macro for placement in the SRAM bank 5 (known as "scratch Y")
Scratch Y is commonly used for critical data and functions accessed only by one core (when only one core is accessing
the RAM bank, there is no opportunity for stalls)
For example a uint32_t variable placed in "scratch Y"
uint32_t __scratch_y("my_group_name") foo = 23;
The section attribute is .scratch_y.<group>
Parameters
group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
4.5.16.4.11. __uninitialized_ram
#define __uninitialized_ram(group) __attribute__((section(".uninitialized_data." #group))) group
Section attribute macro for data that is to be left uninitialized.
Data marked this way will retain its value across a reset (normally uninitialized data - in the .bss section) is initialized to
zero during runtime initialization
For example a uint32_t foo that will retain its value if the program is restarted by reset.
uint32_t __uninitialized_ram(foo);
The section attribute is .uninitialized_data.<group>
Parameters
group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
4.5.16.4.12. __in_flash
#define __in_flash(group) __attribute__((section(".flashdata." group)))
Section attribute macro for placement in flash even in a COPY_TO_RAM binary.
For example a uint32_t variable explicitly placed in flash (it will hard fault if you attempt to write it!)
uint32_t __in_flash("my_group_name") foo = 23;
The section attribute is .flashdata.<group>
Parameters
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 473

group
a string suffix to use in the section name to distinguish groups that can be linker garbage-collected
independently
4.5.16.4.13. __no_inline_not_in_flash_func
#define __no_inline_not_in_flash_func(func_name) __noinline __not_in_flash_func(func_name)
Indicates a function should not be stored in flash.
Decorates a function name, such that the function will execute from RAM (assuming it is not inlined into a flash function
by the compiler)
For example a function called my_func taking an int parameter:
void __not_in_flash_func(my_func)(int some_arg) {
The function is placed in the .time_critical.<func_name> linker section
See also
__no_inline_not_in_flash_func
Indicates a function is time/latency critical and should not run from flash
Decorates a function name, such that the function will execute from RAM (assuming it is not inlined into a flash function
by the compiler) to avoid possible flash latency. Currently this macro is identical in implementation to
__not_in_flash_func, however the semantics are distinct and a __time_critical_func may in the future be treated more
specially to reduce the overhead when calling such function from a flash function.
For example a function called my_func taking an int parameter:
void __time_critical(my_func)(int some_arg) {
The function is placed in the .time_critical.<func_name> linker section
See also
__not_in_flash_func
Indicate a function should not be stored in flash and should not be inlined
Decorates a function name, such that the function will execute from RAM, explicitly marking it as noinline to prevent it
being inlined into a flash function by the compiler
For example a function called my_func taking an int parameter:
void __no_inline_not_in_flash_func(my_func)(int some_arg) {
The function is placed in the .time_critical.<func_name> linker section
4.5.16.5. Function Documentation
4.5.16.5.1. __breakpoint
static __force_inline void __breakpoint (void) [static]
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 474

Execute a breakpoint instruction.
4.5.16.5.2. __compiler_memory_barrier
static __always_inline void __compiler_memory_barrier (void) [static]
Ensure that the compiler does not move memory access across this method call.
For example in the following code:
*some_memory_location = var_a;
__compiler_memory_barrier();
uint32_t var_b = *some_other_memory_location
The compiler will not move the load from some_other_memory_location above the memory barrier (which it otherwise might
- even above the memory store!)
4.5.16.5.3. __get_current_exception
static __force_inline uint __get_current_exception (void) [static]
Get the current exception level on this core.
On Cortex-M this is the exception number defined in the architecture reference, which is equal to VTABLE_FIRST_IRQ +
irq num if inside an interrupt handler. (VTABLE_FIRST_IRQ is defined in platform_defs.h).
On Hazard3, this function returns VTABLE_FIRST_IRQ + irq num if inside of an external IRQ handler (or a fault from such
a handler), and 0 otherwise, generally aligning with the Cortex-M values.
Returns
the exception number if the CPU is handling an exception, or 0 otherwise
4.5.16.5.4. __mul_instruction
static __force_inline int32_t __mul_instruction (int32_t a, int32_t b) [static]
Multiply two integers using an assembly MUL instruction.
This multiplies a by b using multiply instruction using the ARM mul instruction regardless of values (the compiler might
otherwise choose to perform shifts/adds), i.e. this is a 1 cycle operation.
Parameters
a
the first operand
b
the second operand
Returns
a * b
4.5.16.5.5. busy_wait_at_least_cycles
static void busy_wait_at_least_cycles (uint32_t minimum_cycles) [inline], [static]
Helper method to busy-wait for at least the given number of cycles.
This method is useful for introducing very short delays.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 475

This method busy-waits in a tight loop for the given number of system clock cycles. The total wait time is only accurate
to within 2 cycles, and this method uses a loop counter rather than a hardware timer, so the method will always take
longer than expected if an interrupt is handled on the calling core during the busy-wait; you can of course disable
interrupts to prevent this.
You can use clock_get_hz(clk_sys) to determine the number of clock cycles per second if you want to convert an actual
time duration to a number of cycles.
Parameters
minimum_cycles
the minimum number of system clock cycles to delay for
4.5.16.5.6. get_core_num
static __force_inline uint get_core_num (void) [static]
Get the current core number.
Returns
The core number the call was made from
4.5.16.5.7. panic
void panic (const char * fmt, …)
Displays a panic message and halts execution.
An attempt is made to output the message to all registered STDOUT drivers after which this method executes a BKPT
instruction.
Parameters
fmt
format string (printf-like)
…
printf-like arguments
4.5.16.5.8. panic_unsupported
void panic_unsupported (void)
Panics with the message "Unsupported".
See also
panic
4.5.16.5.9. pico_processor_state_is_nonsecure
static __force_inline bool pico_processor_state_is_nonsecure (void) [static]
Return true if executing in the NonSecure state (Arm-only)
Returns
True if currently executing in the NonSecure state on an Arm processor
4.5.16.5.10. rp2040_chip_version
static uint8_t rp2040_chip_version (void) [inline], [static]
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 476

Returns the RP2040 chip revision number for compatibility.
Returns
2 RP2040 errata fixed in B2 are fixed in RP2350
4.5.16.5.11. rp2040_rom_version
static uint8_t rp2040_rom_version (void) [inline], [static]
Returns the RP2040 rom version number.
Returns
the RP2040 rom version number (1 for RP2040-B0, 2 for RP2040-B1, 3 for RP2040-B2)
4.5.16.5.12. rp2350_chip_version
uint8_t rp2350_chip_version (void)
Returns the RP2350 chip revision number.
Returns
the RP2350 chip revision number (1 for B0/B1, 2 for B2)
4.5.16.5.13. tight_loop_contents
static __force_inline void tight_loop_contents (void) [static]
No-op function for the body of tight loops.
No-op function intended to be called by any tight hardware polling loop. Using this ubiquitously makes it much easier to
find tight loops, but also in the future #ifdef-ed support for lockup debugging might be added
4.5.17. pico_printf
Compact replacement for printf by Marco Paland ([email protected])
4.5.18. pico_runtime
Basic runtime support for running pre-main initializers provided by other libraries.
4.5.18.1. Detailed Description
This library aggregates the following other libraries (if available):
•
hardware_uart
•
pico_bit_ops
•
pico_divider
•
pico_double
•
pico_int64_ops
•
pico_float
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 477

•
pico_malloc
•
pico_mem_ops
•
pico_atomic
•
pico_cxx_options
•
pico_standard_binary_info
•
pico_standard_link
•
pico_sync
•
pico_printf
•
pico_crt0
•
pico_clib_interface
•
pico_stdio
4.5.18.2. Functions
void runtime_init (void)
Run all the initializations that are usually called by crt0.S before entering main.
4.5.18.3. Function Documentation
4.5.18.3.1. runtime_init
void runtime_init (void)
Run all the initializations that are usually called by crt0.S before entering main.
This method is useful to set up the runtime after performing a watchdog or powman reboot via scratch vector.
4.5.19. pico_runtime_init
Main runtime initialization functions required to set up the runtime environment before entering main.
4.5.19.1. Detailed Description
The runtime initialization is registration based:
For each step of the initialization there is a 5 digit ordinal which indicates the ordering (alphabetic increasing sort of the
5 digits) of the steps.
e.g. for the step "bootrom_reset", there is:
1 #ifndef PICO_RUNTIME_INIT_BOOTROM_RESET
2 #define PICO_RUNTIME_INIT_BOOTROM_RESET "00050"
3 #endif
The user can override the order if they wish, by redefining PICO_RUNTIME_INIT_BOOTROM_RESET
For each step, the automatic initialization may be skipped by defining (in this case)
PICO_RUNTIME_SKIP_INIT_BOOTROM_RESET = 1. The user can then choose to either omit the step completely or
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 478

register their own replacement initialization.
The default method used to perform the initialization is provided, in case the user wishes to call it manually; in this case:
1 void runtime_init_bootrom_reset(void);
If PICO_RUNTIME_NO_INIT_BOOTOROM_RESET define is set (NO vs SKIP above), then the function is not defined,
allowing the user to provide a replacement (and also avoiding cases where the default implementation won’t compile
due to missing dependencies)
4.5.19.2. Functions
static void clocks_init (void)
Initialise the clock hardware.
4.5.19.3. Function Documentation
4.5.19.3.1. clocks_init
static void clocks_init (void) [inline], [static]
Initialise the clock hardware.
Must be called before any other clock function.
4.5.20. pico_stdio
Customized stdio support allowing for input and output from UART, USB, semi-hosting etc.
4.5.20.1. Detailed Description
Note the API for adding additional input output devices is not yet considered stable
4.5.20.2. Modules
pico_stdio_semihosting
Experimental support for stdout using RAM semihosting .
pico_stdio_uart
Support for stdin/stdout using UART .
pico_stdio_rtt
Support for stdin/stdout using SEGGER RTT .
pico_stdio_usb
Support for stdin/stdout over USB serial (CDC) .
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 479

4.5.20.3. Functions
bool stdio_init_all (void)
Initialize all of the present standard stdio types that are linked into the binary.
bool stdio_deinit_all (void)
Deinitialize all of the present standard stdio types that are linked into the binary.
void stdio_flush (void)
Flushes any buffered output.
int stdio_getchar_timeout_us (uint32_t timeout_us)
Return a character from stdin if there is one available within a timeout.
static int getchar_timeout_us (uint32_t timeout_us)
Alias for stdio_getchar_timeout_us for backwards compatibility.
void stdio_set_driver_enabled (stdio_driver_t *driver, bool enabled)
Adds or removes a driver from the list of active drivers used for input/output.
void stdio_filter_driver (stdio_driver_t *driver)
Control limiting of output to a single driver.
void stdio_set_translate_crlf (stdio_driver_t *driver, bool translate)
control conversion of line feeds to carriage return on transmissions
int stdio_putchar_raw (int c)
putchar variant that skips any CR/LF conversion if enabled
static int putchar_raw (int c)
Alias for stdio_putchar_raw for backwards compatibility.
int stdio_puts_raw (const char *s)
puts variant that skips any CR/LF conversion if enabled
static int puts_raw (const char *s)
Alias for stdio_puts_raw for backwards compatibility.
void stdio_set_chars_available_callback (void(*fn)(void *), void *param)
get notified when there are input characters available
int stdio_get_until (char *buf, int len, absolute_time_t until)
Waits until a timeout to reard at least one character into a buffer.
int stdio_put_string (const char *s, int len, bool newline, bool cr_translation)
Prints a buffer to stdout with optional newline and carriage return insertion.
int stdio_getchar (void)
stdio_getchar Alias for getchar that definitely does not go thru the implementation in the standard C library even
when PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
int stdio_putchar (int)
stdio_getchar Alias for putchar that definitely does not go thru the implementation in the standard C library even
when PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
int stdio_puts (const char *s)
stdio_getchar Alias for puts that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
int stdio_vprintf (const char *format, va_list va)
stdio_getchar Alias for vprintf that definitely does not go thru the implementation in the standard C library even
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 480

when PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
int __printflike (1, 0) stdio_printf(const char *format
stdio_getchar Alias for printf that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
4.5.20.4. Function Documentation
4.5.20.4.1. __printflike
int __printflike (1, 0)
stdio_getchar Alias for printf that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
4.5.20.4.2. getchar_timeout_us
static int getchar_timeout_us (uint32_t timeout_us) [inline], [static]
Alias for stdio_getchar_timeout_us for backwards compatibility.
4.5.20.4.3. putchar_raw
static int putchar_raw (int c) [inline], [static]
Alias for stdio_putchar_raw for backwards compatibility.
4.5.20.4.4. puts_raw
static int puts_raw (const char * s) [inline], [static]
Alias for stdio_puts_raw for backwards compatibility.
4.5.20.4.5. stdio_deinit_all
bool stdio_deinit_all (void)
Deinitialize all of the present standard stdio types that are linked into the binary.
This method currently only supports stdio_uart and stdio_semihosting
Returns
true if all outputs was successfully deinitialized, false otherwise.
See also
stdio_uart, stdio_usb, stdio_semihosting, stdio_rtt
4.5.20.4.6. stdio_filter_driver
void stdio_filter_driver (stdio_driver_t * driver)
Control limiting of output to a single driver.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 481

NOTE
this method should always be called on an initialized driver
Parameters
driver
if non-null then output only that driver will be used for input/output (assuming it is in the list of enabled
drivers). if NULL then all enabled drivers will be used
4.5.20.4.7. stdio_flush
void stdio_flush (void)
Flushes any buffered output.
4.5.20.4.8. stdio_get_until
int stdio_get_until (char * buf, int len, absolute_time_t until)
Waits until a timeout to reard at least one character into a buffer.
This method returns as soon as input is available, but more characters may be returned up to the end of the buffer.
Parameters
buf
the buffer to read into
len
the length of the buffer
Returns
the number of characters read or PICO_ERROR_TIMEOUT
Parameters
until
the time after which to return PICO_ERROR_TIMEOUT if no characters are available
4.5.20.4.9. stdio_getchar
int stdio_getchar (void)
stdio_getchar Alias for getchar that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
4.5.20.4.10. stdio_getchar_timeout_us
int stdio_getchar_timeout_us (uint32_t timeout_us)
Return a character from stdin if there is one available within a timeout.
Parameters
timeout_us
the timeout in microseconds, or 0 to not wait for a character if none available.
Returns
the character from 0-255 or PICO_ERROR_TIMEOUT if timeout occurs
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 482

4.5.20.4.11. stdio_init_all
bool stdio_init_all (void)
Initialize all of the present standard stdio types that are linked into the binary.
Call this method once you have set up your clocks to enable the stdio support for UART, USB, semihosting, and RTT
based on the presence of the respective libraries in the binary.
When stdio_usb is configured, this method can be optionally made to block, waiting for a connection via the variables
specified in stdio_usb_init (i.e. PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS)
Returns
true if at least one output was successfully initialized, false otherwise.
See also
stdio_uart, stdio_usb, stdio_semihosting, stdio_rtt
4.5.20.4.12. stdio_put_string
int stdio_put_string (const char * s, int len, bool newline, bool cr_translation)
Prints a buffer to stdout with optional newline and carriage return insertion.
This method returns as soon as input is available, but more characters may be returned up to the end of the buffer.
Parameters
s
the characters to print
len
the length of s
newline
true if a newline should be added after the string
cr_translation
true if line feed to carriage return translation should be performed
Returns
the number of characters written
4.5.20.4.13. stdio_putchar
int stdio_putchar (int c)
stdio_getchar Alias for putchar that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
4.5.20.4.14. stdio_putchar_raw
int stdio_putchar_raw (int c)
putchar variant that skips any CR/LF conversion if enabled
4.5.20.4.15. stdio_puts
int stdio_puts (const char * s)
stdio_getchar Alias for puts that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 483

4.5.20.4.16. stdio_puts_raw
int stdio_puts_raw (const char * s)
puts variant that skips any CR/LF conversion if enabled
4.5.20.4.17. stdio_set_chars_available_callback
void stdio_set_chars_available_callback (void(*)(void *) fn, void * param)
get notified when there are input characters available
Parameters
fn
Callback function to be called when characters are available. Pass NULL to cancel any existing callback
param
Pointer to pass to the callback
4.5.20.4.18. stdio_set_driver_enabled
void stdio_set_driver_enabled (stdio_driver_t * driver, bool enabled)
Adds or removes a driver from the list of active drivers used for input/output.
NOTE
this method should always be called on an initialized driver and is not re-entrant
Parameters
driver
the driver
enabled
true to add, false to remove
4.5.20.4.19. stdio_set_translate_crlf
void stdio_set_translate_crlf (stdio_driver_t * driver, bool translate)
control conversion of line feeds to carriage return on transmissions
NOTE
this method should always be called on an initialized driver
Parameters
driver
the driver
translate
If true, convert line feeds to carriage return on transmissions
4.5.20.4.20. stdio_vprintf
int stdio_vprintf (const char * format, va_list va)
stdio_getchar Alias for vprintf that definitely does not go thru the implementation in the standard C library even when
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS == 0
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 484
4.5.20.5. pico_stdio_semihosting
Experimental support for stdout using RAM semihosting .
4.5.20.5.1. Detailed Description
Linking this library or calling pico_enable_stdio_semihosting(TARGET ENABLED) in the CMake (which achieves the same thing)
will add semihosting to the drivers used for standard output
4.5.20.5.2. Functions
void stdio_semihosting_init (void)
Explicitly initialize stdout over semihosting and add it to the current set of stdout targets.
void stdio_semihosting_deinit (void)
Explicitly deinitialize stdout over semihosting and add it to the current set of stdout targets.
4.5.20.5.3. Function Documentation
stdio_semihosting_deinit
void stdio_semihosting_deinit (void)
Explicitly deinitialize stdout over semihosting and add it to the current set of stdout targets.
NOTE
this method is automatically called by stdio_deinit_all() if pico_stdio_semihosting is included in the build
stdio_semihosting_init
void stdio_semihosting_init (void)
Explicitly initialize stdout over semihosting and add it to the current set of stdout targets.
NOTE
this method is automatically called by stdio_init_all() if pico_stdio_semihosting is included in the build
4.5.20.6. pico_stdio_uart
Support for stdin/stdout using UART .
4.5.20.6.1. Detailed Description
Linking this library or calling pico_enable_stdio_uart(TARGET ENABLED) in the CMake (which achieves the same thing) will
add UART to the drivers used for standard input/output
4.5.20.6.2. Functions
void stdio_uart_init (void)
Explicitly initialize stdin/stdout over UART and add it to the current set of stdin/stdout drivers.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 485

void stdout_uart_init (void)
Explicitly initialize stdout only (no stdin) over UART and add it to the current set of stdout drivers.
void stdin_uart_init (void)
Explicitly initialize stdin only (no stdout) over UART and add it to the current set of stdin drivers.
void stdio_uart_init_full (uart_inst_t *uart, uint baud_rate, int tx_pin, int rx_pin)
Perform custom initialization initialize stdin/stdout over UART and add it to the current set of stdin/stdout drivers.
void stdio_uart_deinit (void)
Explicitly deinitialize stdin/stdout over UART and remove it from the current set of stdin/stdout drivers.
void stdout_uart_deinit (void)
Explicitly deinitialize stdout only (no stdin) over UART and remove it from the current set of stdout drivers.
void stdin_uart_deinit (void)
Explicitly deinitialize stdin only (no stdout) over UART and remove it from the current set of stdin drivers.
void stdio_uart_deinit_full (uart_inst_t *uart, int tx_pin, int rx_pin)
Perform custom deinitialization deinitialize stdin/stdout over UART and remove it from the current set of
stdin/stdout drivers.
4.5.20.6.3. Function Documentation
stdin_uart_deinit
void stdin_uart_deinit (void)
Explicitly deinitialize stdin only (no stdout) over UART and remove it from the current set of stdin drivers.
This method disables PICO_DEFAULT_UART_RX_PIN for UART input (if defined), and leaves the pads isolated
stdin_uart_init
void stdin_uart_init (void)
Explicitly initialize stdin only (no stdout) over UART and add it to the current set of stdin drivers.
This method sets up PICO_DEFAULT_UART_RX_PIN for UART input (if defined) , and configures the baud rate as
PICO_DEFAULT_UART_BAUD_RATE
stdio_uart_deinit
void stdio_uart_deinit (void)
Explicitly deinitialize stdin/stdout over UART and remove it from the current set of stdin/stdout drivers.
This method disables PICO_DEFAULT_UART_TX_PIN for UART output (if defined), PICO_DEFAULT_UART_RX_PIN for
input (if defined) and leaves the pads isolated.
NOTE
this method is automatically called by stdio_deinit_all() if pico_stdio_uart is included in the build
stdio_uart_deinit_full
void stdio_uart_deinit_full (uart_inst_t * uart, int tx_pin, int rx_pin)
Perform custom deinitialization deinitialize stdin/stdout over UART and remove it from the current set of stdin/stdout
drivers.
Parameters
uart
the uart instance to use, uart0 or uart1
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 486

tx_pin
the UART pin to use for stdout (or -1 for no stdout)
rx_pin
the UART pin to use for stdin (or -1 for no stdin)
stdio_uart_init
void stdio_uart_init (void)
Explicitly initialize stdin/stdout over UART and add it to the current set of stdin/stdout drivers.
This method sets up PICO_DEFAULT_UART_TX_PIN for UART output (if defined), PICO_DEFAULT_UART_RX_PIN for
input (if defined) and configures the baud rate as PICO_DEFAULT_UART_BAUD_RATE.
NOTE
this method is automatically called by stdio_init_all() if pico_stdio_uart is included in the build
stdio_uart_init_full
void stdio_uart_init_full (uart_inst_t * uart, uint baud_rate, int tx_pin, int rx_pin)
Perform custom initialization initialize stdin/stdout over UART and add it to the current set of stdin/stdout drivers.
Parameters
uart
the uart instance to use, uart0 or uart1
baud_rate
the baud rate in Hz
tx_pin
the UART pin to use for stdout (or -1 for no stdout)
rx_pin
the UART pin to use for stdin (or -1 for no stdin)
stdout_uart_deinit
void stdout_uart_deinit (void)
Explicitly deinitialize stdout only (no stdin) over UART and remove it from the current set of stdout drivers.
This method disables PICO_DEFAULT_UART_TX_PIN for UART output (if defined), and leaves the pad isolated
stdout_uart_init
void stdout_uart_init (void)
Explicitly initialize stdout only (no stdin) over UART and add it to the current set of stdout drivers.
This method sets up PICO_DEFAULT_UART_TX_PIN for UART output (if defined) , and configures the baud rate as
PICO_DEFAULT_UART_BAUD_RATE
4.5.20.7. pico_stdio_rtt
Support for stdin/stdout using SEGGER RTT .
4.5.20.7.1. Detailed Description
Linking this library or calling pico_enable_stdio_rtt(TARGET) in the CMake (which achieves the same thing) will add RTT to
the drivers used for standard output
4.5.20.7.2. Functions
void stdio_rtt_init (void)
Explicitly initialize stdin/stdout over RTT and add it to the current set of stdin/stdout drivers.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 487

void stdio_rtt_deinit (void)
Explicitly deinitialize stdin/stdout over RTT and remove it from the current set of stdin/stdout drivers.
4.5.20.7.3. Function Documentation
stdio_rtt_deinit
void stdio_rtt_deinit (void)
Explicitly deinitialize stdin/stdout over RTT and remove it from the current set of stdin/stdout drivers.
NOTE
this method is automatically called by stdio_deinit_all() if pico_stdio_rtt is included in the build
stdio_rtt_init
void stdio_rtt_init (void)
Explicitly initialize stdin/stdout over RTT and add it to the current set of stdin/stdout drivers.
NOTE
this method is automatically called by stdio_init_all() if pico_stdio_rtt is included in the build
4.5.20.8. pico_stdio_usb
Support for stdin/stdout over USB serial (CDC) .
4.5.20.8.1. Detailed Description
Linking this library or calling pico_enable_stdio_usb(TARGET ENABLED) in the CMake (which achieves the same thing) will add
USB CDC to the drivers used for standard input/output
Note this library is a developer convenience. It is not applicable in all cases; for one it takes full control of the USB
device precluding your use of the USB in device or host mode. For this reason, this library will automatically disengage if
you try to using it alongside tinyusb_device or tinyusb_host. It also takes control of a lower level IRQ and sets up a
periodic background task.
This library also includes (by default) functionality to enable the RP-series microcontroller to be reset over the USB
interface.
4.5.20.8.2. Functions
bool stdio_usb_init (void)
Explicitly initialize USB stdio and add it to the current set of stdin drivers.
bool stdio_usb_deinit (void)
Explicitly deinitialize USB stdio and remove it from the current set of stdin drivers.
bool stdio_usb_connected (void)
Check if there is an active stdio CDC connection to a host.
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 488

4.5.20.8.3. Function Documentation
stdio_usb_connected
bool stdio_usb_connected (void)
Check if there is an active stdio CDC connection to a host.
Returns
true if stdio is connected over CDC
stdio_usb_deinit
bool stdio_usb_deinit (void)
Explicitly deinitialize USB stdio and remove it from the current set of stdin drivers.
Returns
true if the USB CDC was deinitialized, false if an error occurred
stdio_usb_init
bool stdio_usb_init (void)
Explicitly initialize USB stdio and add it to the current set of stdin drivers.
PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS can be set to cause this method to wait for a CDC connection from
the host before returning, which is useful if you don’t want any initial stdout output to be discarded before the
connection is established.
Returns
true if the USB CDC was initialized, false if an error occurred
Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
SPDX-License-Identifier: BSD-3-Clause
4.5.21. pico_standard_binary_info
Includes default information about the binary that can be displayed by picotool.
4.5.21.1. Detailed Description
Information is included only if PICO_NO_BINARY_INFO and PICO_NO_PROGRAM_INFO are both false.
This library adds the following information to the binary:
•
The program name if defined (unless PICO_NO_BINARY_SIZE=1). The value is PICO_PROGRAM_NAME or PICO_TARGET_NAME if the
former isn’t defined
•
The value of PICO_BOARD (unless PICO_NO_BI_PICO_BOARD=1)
•
The SDK version (unless PICO_NO_BI_SDK_VERSION=1)
•
The program version string if defined (unless PICO_NO_BI_PROGRAM_VERSION_STRING=1). The value is
PICO_PROGRAM_VERSION_STRING``
•
The program description if defined (unless`PICO_NO_BI_PROGRAM_DESCRIPTION=1). The value
is`PICO_PROGRAM_DESCRIPTION``
•
The program url if defined (unless`PICO_NO_BI_PROGRAM_URL=1). The value is`PICO_PROGRAM_URL``
•
The boot stage 2 used if any (unless`PICO_NO_BI_BOOT_STAGE2_NAME=1). The value is`PICO_BOOT_STAGE2_NAME``
Raspberry Pi Pico-series C/C++ SDK
4.5. Runtime Infrastructure 489

•
The program build date (unless`PICO_NO_BI_PROGRAM_BUILD_DATE=1). The value defaults to the C preprocessor value
`__DATE__, but can be overridden with PICO_PROGRAM_BUILD_DATE. Note you should do a clean build if you want to be
sure this value is up to date.
•
The program build type (unless PICO_NO_BI_BUILD_TYPE=1). The value is PICO_CMAKE_BUILD_TYPE which comes from the
CMake build - e.g. Release, Debug, RelMinSize
•
The binary size (unless PICO_NO_BI_BINARY_SIZE=1)
4.5.22. pico_standard_link
Setup for link options for a standard SDK executable.
4.5.22.1. Detailed Description
This includes
•
C runtime initialization
•
Linker scripts for 'default', 'no_flash', 'blocked_ram' and 'copy_to_ram' binaries
•
'Binary Information' support
•
Linker option control
4.6. External API Headers
Headers for interfaces that are shared with code outside of the SDK
boot_picobin_headers Constants for PICOBIN format.
boot_picoboot_header
s
Header file for the PICOBOOT USB interface exposed by an RP2xxx chip in BOOTSEL mode.
boot_uf2_headers Header file for the UF2 format supported by a RP2xxx chip in BOOTSEL mode.
pico_usb_reset_interf
ace_headers
Definition for the reset interface that may be exposed by the pico_stdio_usb library.
4.6.1. boot_picobin_headers
Constants for PICOBIN format.
4.6.2. boot_picoboot_headers
Header file for the PICOBOOT USB interface exposed by an RP2xxx chip in BOOTSEL mode.
4.6.3. boot_uf2_headers
Header file for the UF2 format supported by a RP2xxx chip in BOOTSEL mode.
Raspberry Pi Pico-series C/C++ SDK
4.6. External API Headers 490

4.6.4. pico_usb_reset_interface_headers
Definition for the reset interface that may be exposed by the pico_stdio_usb library.
Raspberry Pi Pico-series C/C++ SDK
4.6. External API Headers 491

Chapter 5. SDK configuration
SDK configuration is the process of customising the SDK code for your particular build/application. As the parts of the
SDK that you use are recompiled as part of your build, configuration options can be chosen at compile time resulting in
smaller and more efficient customized versions of the code.
This chapter will show what configuration parameters are available, and how they can be changed.
SDK configuration parameters are passed as C preprocessor definitions to the build. The most common way to override
them is to specify them in your CMakeLists.txt when you define your executable or library:
e.g.
add_executable(my_program main.c)
...
target_compile_definitions(my_program PRIVATE
Ê PICO_STACK_SIZE=4096
)
or if you are creating a library, and you want to add compile definitions whenever your library is included:
add_library(my_library INTERFACE)
...
target_compile_definitions(my_library INTERFACE
Ê PICO_STDIO_DEFAULT_CRLF=0
Ê PICO_DEFAULT_UART=1
)
The definitions can also be specified in header files, as is commonly done for board configuration (see Chapter 8).
For example,. the Pimoroni Tiny2040 board header configures the following to specify appropriate board settings for the
default I2C channel exposed on that board.
// --- I2C ---
#ifndef PICO_DEFAULT_I2C
#define PICO_DEFAULT_I2C 1
#endif
#ifndef PICO_DEFAULT_I2C_SDA_PIN
#define PICO_DEFAULT_I2C_SDA_PIN 2
#endif
#ifndef PICO_DEFAULT_I2C_SCL_PIN
#define PICO_DEFAULT_I2C_SCL_PIN 3
#endif
NOTE
The #ifdef still allows the values to be by the build (i.e. in CMakeLists.txt)
If you would rather set values in your own header file rather than via CMake, then you must make sure the header is
included by all compilation (including the SDK sources). Using a custom PICO_BOARD header is one way of doing this, but a
more advanced way is to have the SDK include your header via pico/config.h which itself is included by every SDK
source file.
Raspberry Pi Pico-series C/C++ SDK
Chapter 5. SDK configuration 492

This can be done by adding the following before the pico_sdk_init() in your CMakeLists.txt:
list(APPEND PICO_CONFIG_HEADER_FILES path/to/your/header.h)
5.1. Full List of SDK Configuration Defines
Table 34. SDK and
Board Configuration
Defines
Name / Description Default
CYW43_PIO_CLOCK_DIV_DYNAMIC
Enable runtime configuration of the clock divider for communication with the
wireless chip
0
CYW43_PIO_CLOCK_DIV_FRAC
Fractional part of the clock divider for communication with the wireless chip
0
CYW43_PIO_CLOCK_DIV_INT
Integer part of the clock divider for communication with the wireless chip
2
CYW43_TASK_PRIORITY
Priority for the CYW43 FreeRTOS task
tskIDLE_PRIORITY + 4
CYW43_TASK_STACK_SIZE
Stack size for the CYW43 FreeRTOS task in 4-byte words
1024
GPIO_IRQ_CALLBACK_ORDER_PRIORITY
IRQ priority order of the default IRQ callback
PICO_SHARED_IRQ_HANDLER_LOWE
ST_ORDER_PRIORITY
GPIO_RAW_IRQ_HANDLER_DEFAULT_ORDER_PRIORITY
IRQ priority order of raw IRQ handlers if the priority is not specified
PICO_SHARED_IRQ_HANDLER_DEFAU
LT_ORDER_PRIORITY
PARAM_ASSERTIONS_DISABLE_ALL
Global assert disable
0
PARAM_ASSERTIONS_ENABLED_ADDRESS_ALIAS
Enable/disable assertions in memory address aliasing macros
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_ADC
Enable/disable assertions in the hardware_adc module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_BOOT_LOCK
Enable/disable assertions in the hardware_boot_lock module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_CLOCKS
Enable/disable assertions in the hardware_clocks module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_DMA
Enable/disable hardware_dma assertions
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_EXCEPTION
Enable/disable assertions in the hardware_exception module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_FLASH
Enable/disable assertions in the hardware_flash module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_GPIO
Enable/disable assertions in the hardware_gpio module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_I2C
Enable/disable assertions in the hardware_i2c module
0
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 493
Name / Description Default
PARAM_ASSERTIONS_ENABLED_HARDWARE_INTERP
Enable/disable assertions in the hardware_interp module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_IRQ
Enable/disable assertions in the hardware_irq module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_PIO
Enable/disable assertions in the hardware_pio module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_POWMAN
Enable/disable hardware_powman assertions
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_PWM
Enable/disable assertions in the hardware_pwm module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_RESETS
Enable/disable assertions in the hardware_resets module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_SHA256
Enable/disable hardware_sha256 assertions
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_SPI
Enable/disable assertions in the hardware_spi module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_SYNC
Enable/disable assertions in the hardware_sync module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_TICKS
Enable/disable assertions in the hardware_ticks module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_TIMER
Enable/disable assertions in the hardware_timer module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_UART
Enable/disable assertions in the hardware_uart module
0
PARAM_ASSERTIONS_ENABLED_HARDWARE_WATCHDOG
Enable/disable assertions in the hardware_watchdog module
0
PARAM_ASSERTIONS_ENABLED_LOCK_CORE
Enable/disable assertions in the lock core
0
PARAM_ASSERTIONS_ENABLED_PHEAP
Enable/disable assertions in the pheap module
0
PARAM_ASSERTIONS_ENABLED_PICO_CYW43_ARCH
Enable/disable assertions in the pico_cyw43_arch module
0
PARAM_ASSERTIONS_ENABLED_PICO_MULTICORE
Enable/disable assertions in the pico_multicore module
0
PARAM_ASSERTIONS_ENABLED_PICO_TIME
Enable/disable assertions in the pico_time module
0
PARAM_ASSERTIONS_ENABLED_PIO_INSTRUCTIONS
Enable/disable assertions in the PIO instructions
0
PARAM_ASSERTIONS_ENABLE_ALL
Global assert enable
0
PICO_BOOTROM_LOCKING_ENABLED
Enable/disable locking for bootrom functions that use shared reqsources. If
this flag is enabled bootrom lock checking is turned on and BOOT locks are
taken around the relevant bootrom functions
1
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 494

Name / Description Default
PICO_BOOTSEL_VIA_DOUBLE_RESET_ACTIVITY_LED
Optionally define a pin to use as bootloader activity LED when BOOTSEL mode
is entered via reset double tap
PICO_BOOTSEL_VIA_DOUBLE_RESET_INTERFACE_DISABLE_MASK
Optionally disable either the mass storage interface (bit 0) or the PICOBOOT
interface (bit 1) when entering BOOTSEL mode via double reset
0
PICO_BOOTSEL_VIA_DOUBLE_RESET_TIMEOUT_MS
Window of opportunity for a second press of a reset button to enter BOOTSEL
mode (milliseconds)
200
PICO_BOOT_STAGE2_CHOOSE_AT25SF128A
Select boot2_at25sf128a as the boot stage 2 when no boot stage 2 selection
is made by the CMake build
0
PICO_BOOT_STAGE2_CHOOSE_GENERIC_03H
Select boot2_generic_03h as the boot stage 2 when no boot stage 2 selection
is made by the CMake build
1
PICO_BOOT_STAGE2_CHOOSE_IS25LP080
Select boot2_is25lp080 as the boot stage 2 when no boot stage 2 selection is
made by the CMake build
0
PICO_BOOT_STAGE2_CHOOSE_W25Q080
Select boot2_w25q080 as the boot stage 2 when no boot stage 2 selection is
made by the CMake build
0
PICO_BOOT_STAGE2_CHOOSE_W25X10CL
Select boot2_w25x10cl as the boot stage 2 when no boot stage 2 selection is
made by the CMake build
0
PICO_BUILD_BOOT_STAGE2_NAME
The name of the boot stage 2 if selected by the build
PICO_CLOCK_AJDUST_PERI_CLOCK_WITH_SYS_CLOCK
When the SYS clock PLL is changed keep the peripheral clock attached to it
0
PICO_CMSIS_RENAME_EXCEPTIONS
Whether to rename SDK exceptions such as isr_nmi to their CMSIS equivalent
i.e. NMI_Handler
1
PICO_CONFIG_HEADER
Unquoted path to header include in place of the default pico/config.h which
may be desirable for build systems which can’t easily generate the
config_autogen header
PICO_CONFIG_RTOS_ADAPTER_HEADER
Unquoted path to header include in the default pico/config.h for RTOS
integration defines that must be included in all sources
PICO_CORE1_STACK_SIZE
Minimum amount of stack space reserved in the linker script for core 1
PICO_STACK_SIZE (0x800)
PICO_CYW43_ARCH_DEBUG_ENABLED
Enable/disable some debugging output in the pico_cyw43_arch module
1 in debug builds
PICO_CYW43_ARCH_DEFAULT_COUNTRY_CODE
Default country code for the cyw43 wireless driver
CYW43_COUNTRY_WORLDWIDE
PICO_DEBUG_MALLOC
Enable/disable debug printf from malloc
0
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 495

Name / Description Default
PICO_DEBUG_MALLOC_LOW_WATER
Define the lower bound for allocation addresses to be printed by
PICO_DEBUG_MALLOC
0
PICO_DEBUG_PIN_BASE
First pin to use for debug output (if enabled)
19
PICO_DEBUG_PIN_COUNT
Number of pins to use for debug output (if enabled)
3
PICO_DEFAULT_I2C
Define the default I2C for a board
Usually provided via board header
PICO_DEFAULT_I2C_SCL_PIN
Define the default I2C SCL pin
Usually provided via board header
PICO_DEFAULT_I2C_SDA_PIN
Define the default I2C SDA pin
Usually provided via board header
PICO_DEFAULT_IRQ_PRIORITY
Define the default IRQ priority
0x80
PICO_DEFAULT_LED_PIN
Optionally define a pin that drives a regular LED on the board
Usually provided via board header
PICO_DEFAULT_LED_PIN_INVERTED
1 if LED is inverted or 0 if not
0
PICO_DEFAULT_SPI
Define the default SPI for a board
Usually provided via board header
PICO_DEFAULT_SPI_CSN_PIN
Define the default SPI CSN pin
Usually provided via board header
PICO_DEFAULT_SPI_RX_PIN
Define the default SPI RX pin
Usually provided via board header
PICO_DEFAULT_SPI_SCK_PIN
Define the default SPI SCK pin
Usually provided via board header
PICO_DEFAULT_SPI_TX_PIN
Define the default SPI TX pin
Usually provided via board header
PICO_DEFAULT_TIMER
Timer instance number to use for RP2040-period hardware_timer APIs that
assumed a single timer instance
0
PICO_DEFAULT_UART
Define the default UART used for printf etc
Usually provided via board header
PICO_DEFAULT_UART_BAUD_RATE
Define the default UART baudrate
115200
PICO_DEFAULT_UART_RX_PIN
Define the default UART RX pin
Usually provided via board header
PICO_DEFAULT_UART_TX_PIN
Define the default UART TX pin
Usually provided via board header
PICO_DEFAULT_WS2812_PIN
Optionally define a pin that controls data to a WS2812 compatible LED on the
board
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 496

Name / Description Default
PICO_DEFAULT_WS2812_POWER_PIN
Optionally define a pin that controls power to a WS2812 compatible LED on
the board
PICO_DISABLE_SHARED_IRQ_HANDLERS
Disable shared IRQ handlers
0
PICO_DOUBLE_SUPPORT_ROM_V1
Include double support code for RP2040 B0 when that chip revision is
supported
1
PICO_EMBED_XIP_SETUP
Embed custom XIP setup (boot2) in an RP2350 binary
0
PICO_FLASH_ASSERT_ON_UNSAFE
Assert in debug mode rather than returning an error if flash_safe_execute
cannot guarantee safety to catch bugs early
1
PICO_FLASH_ASSUME_CORE0_SAFE
Assume that core 0 will never be accessing flash and so doesn’t need to be
considered during flash_safe_execute
0
PICO_FLASH_ASSUME_CORE1_SAFE
Assume that core 1 will never be accessing flash and so doesn’t need to be
considered during flash_safe_execute
0
PICO_FLASH_BANK_STORAGE_OFFSET
Offset in flash of the Bluetooth flash storage
PICO_FLASH_SIZE_BYTES -
PICO_FLASH_BANK_TOTAL_SIZE
PICO_FLASH_BANK_TOTAL_SIZE
Total size of the Bluetooth flash storage. Must be an even multiple of
FLASH_SECTOR_SIZE
FLASH_SECTOR_SIZE * 2
PICO_FLASH_SAFE_EXECUTE_PICO_SUPPORT_MULTICORE_LOCKOUT
Support using multicore_lockout functions to make the other core safe during
flash_safe_execute
1 when using pico_multicore
PICO_FLASH_SAFE_EXECUTE_SUPPORT_FREERTOS_SMP
Support using FreeRTOS SMP to make the other core safe during
flash_safe_execute
1 when using FreeRTOS SMP
PICO_FLASH_SIZE_BYTES
size of primary flash in bytes
Usually provided via board header
PICO_FLOAT_SUPPORT_ROM_V1
Include float support code for RP2040 B0 when that chip revision is supported
1
PICO_HEAP_SIZE
Minimum amount of heap space reserved by the linker script
0x800
PICO_INCLUDE_RTC_DATETIME
Whether to include the datetime_t type used with the RP2040 RTC hardware
1 on RP2040
PICO_MALLOC_PANIC
Enable/disable panic when an allocation failure occurs
1
PICO_MAX_SHARED_IRQ_HANDLERS
Maximum number of shared IRQ handlers
4
PICO_MBEDTLS_SHA256_ALT_USE_DMA
Whether to use DMA for writing to hardware for the mbedtls SHA-256
hardware acceleration
1
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 497

Name / Description Default
PICO_NO_BINARY_INFO
Don’t include "binary info" in the output binary
0 except for PICO_PLATFORM host
PICO_NO_FPGA_CHECK
Remove the FPGA platform check for small code size reduction
1
PICO_NO_RAM_VECTOR_TABLE
Enable/disable the RAM vector table
0
PICO_NO_SIM_CHECK
Remove the SIM platform check for small code size reduction
1
PICO_OPAQUE_ABSOLUTE_TIME_T
Enable opaque type for absolute_time_t to help catch inadvertent confusing
uint64_t delays with absolute times
0
PICO_PANIC_FUNCTION
Name of a function to use in place of the stock panic function or empty string
to simply breakpoint on panic
PICO_PHEAP_MAX_ENTRIES
Maximum number of entries in the pheap
255
PICO_PIO_USE_GPIO_BASE
Enable code for handling more than 32 PIO pins
true when supported and when the
device has more than 32 pins
PICO_PIO_VERSION
The PIO hardware version
0 on RP2040 and 1 on RP2350
PICO_PRINTF_ALWAYS_INCLUDED
Whether to always include printf code even if only called weakly (by panic)
1 in debug build 0 otherwise
PICO_PRINTF_DEFAULT_FLOAT_PRECISION
Define default floating point precision
6
PICO_PRINTF_FTOA_BUFFER_SIZE
Define printf ftoa buffer size
32
PICO_PRINTF_MAX_FLOAT
Define the largest float suitable to print with %f
1e9
PICO_PRINTF_NTOA_BUFFER_SIZE
Define printf ntoa buffer size
32
PICO_PRINTF_SUPPORT_EXPONENTIAL
Enable exponential floating point printing
1
PICO_PRINTF_SUPPORT_FLOAT
Enable floating point printing
1
PICO_PRINTF_SUPPORT_LONG_LONG
Enable support for long long types (%llu or %p)
1
PICO_PRINTF_SUPPORT_PTRDIFF_T
Enable support for the ptrdiff_t type (%t)
1
PICO_QUEUE_MAX_LEVEL
Maintain a field for the highest level that has been reached by a queue
0
PICO_RAND_BUS_PERF_COUNTER_EVENT
Bus performance counter event to use for sourcing entropy
arbiter_sram5_perf_event_access
PICO_RAND_BUS_PERF_COUNTER_INDEX
Bus performance counter index to use for sourcing entropy
Undefined meaning pick one that is
not counting any valid event already
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 498

Name / Description Default
PICO_RAND_ENTROPY_SRC_BUS_PERF_COUNTER
Enable/disable use of a bus performance counter as an entropy source
1 if no hardware TRNG
PICO_RAND_ENTROPY_SRC_ROSC
Enable/disable use of ROSC as an entropy source
1 if no hardware TRNG
PICO_RAND_ENTROPY_SRC_TIME
Enable/disable use of hardware timestamp as an entropy source
1
PICO_RAND_ENTROPY_SRC_TRNG
Enable/disable use of hardware TRNG as an entropy source
1 if no hardware TRNG
PICO_RAND_MIN_ROSC_BIT_SAMPLE_TIME_US
Define a default minimum time between sampling the ROSC random bit
10
PICO_RAND_RAM_HASH_END
End of address in RAM (non-inclusive) to hash during pico_rand seed
initialization
SRAM_END
PICO_RAND_RAM_HASH_START
Start of address in RAM (inclusive) to hash during pico_rand seed initialization
PICO_RAND_RAM_HASH_END - 1024
PICO_RAND_ROSC_BIT_SAMPLE_COUNT
Number of samples to take of the ROSC random bit per random number
generation
1
PICO_RAND_SEED_ENTROPY_SRC_BOARD_ID
Enable/disable use of board id as part of the random seed
not
PICO_RAND_SEED_ENTROPY_SRC_B
OOT_RANDOM
PICO_RAND_SEED_ENTROPY_SRC_BOOT_RANDOM
Enable/disable use of the per boot random number as an entropy source for
the random seed
0 on RP2040 which has none
PICO_RAND_SEED_ENTROPY_SRC_BUF_PERF_COUNTER
Enable/disable use of a bus performance counter as an entropy source for the
random seed
PICO_RAND_ENTROPY_SRC_BUS_PE
RF_COUNTER
PICO_RAND_SEED_ENTROPY_SRC_RAM_HASH
Enable/disable use of a RAM hash as an entropy source for the random seed
1 if no hardware TRNG
PICO_RAND_SEED_ENTROPY_SRC_ROSC
Enable/disable use of ROSC as an entropy source for the random seed
PICO_RAND_ENTROPY_SRC_ROSC
PICO_RAND_SEED_ENTROPY_SRC_TIME
Enable/disable use of hardware timestamp as an entropy source for the
random seed
PICO_RAND_ENTROPY_SRC_TIME
PICO_RAND_SEED_ENTROPY_SRC_TRNG
Enable/disable use of hardware TRNG as an entropy source for the random
seed
PICO_RAND_ENTROPY_SRC_TRNG
PICO_RP2040_B0_SUPPORTED
Whether to include any specific software support for RP2040 B0 revision
1
PICO_RP2040_B1_SUPPORTED
Whether to include any specific software support for RP2040 B1 revision
1
PICO_RP2040_B2_SUPPORTED
Whether to include any specific software support for RP2040 B2 revision
1
PICO_RP2350A
Whether the current board has an RP2350 in an A (30 GPIO) package
Usually provided via board header
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 499

Name / Description Default
PICO_RP2350_A2_SUPPORTED
Whether to include any specific software support for RP2350 A2 revision
1
PICO_RUNTIME_NO_INIT_BOOTROM_RESET
Do not include SDK implementation of runtime_init_bootrom_reset function
1 on RP2040
PICO_RUNTIME_NO_INIT_CLOCKS
Do not include SDK implementation of runtime_init_clocks function
0
PICO_RUNTIME_NO_INIT_DEFAULT_ALARM_POOL
Do not include SDK implementation of runtime_init_default_alarm_pool function
1 if
PICO_TIME_DEFAULT_ALARM_POOL_DISABLED
is
PICO_RUNTIME_NO_INIT_EARLY_RESETS
Do not include SDK implementation of runtime_init_early_resets function
1 on RP2040
PICO_RUNTIME_NO_INIT_INSTALL_RAM_VECTOR_TABLE
Do not include SDK implementation of runtime_init_install_ram_vector_table
function
0 unless RISC-V or RAM binary
PICO_RUNTIME_NO_INIT_MUTEX
Do not include SDK implementation of runtime_init_mutex function
0
PICO_RUNTIME_NO_INIT_PER_CORE_BOOTROM_RESET
Do not include SDK implementation of runtime_init_per_core_bootrom_reset
function
1 on RP2040
PICO_RUNTIME_NO_INIT_PER_CORE_ENABLE_COPROCESSORS
Do not include SDK implementation of
runtime_init_per_core_enable_coprocessors function
1 on RP2040 or RISC-V
PICO_RUNTIME_NO_INIT_PER_CORE_INSTALL_STACK_GUARD
Do not include SDK implementation of
runtime_init_per_core_install_stack_guard function
1 unless PICO_USE_STACK_GUARDS is 1
PICO_RUNTIME_NO_INIT_RP2040_GPIO_IE_DISABLE
Do not include SDK implementation of runtime_init_rp2040_gpio_ie_disable
function
0 on RP2040
PICO_RUNTIME_NO_INIT_SPIN_LOCKS_RESET
Do not include SDK implementation of runtime_init_spin_locks_reset function
0
PICO_RUNTIME_NO_INIT_USB_POWER_DOWN
Do not include SDK implementation of runtime_init_usb_power_down function
0
PICO_RUNTIME_SKIP_INIT_BOOTROM_LOCKING_ENABLE
Skip calling of runtime_init_bootrom_locking_enable function during runtime init
0
PICO_RUNTIME_SKIP_INIT_BOOTROM_RESET
Skip calling of runtime_init_bootrom_reset function during runtime init
1 on RP2040
PICO_RUNTIME_SKIP_INIT_BOOT_LOCKS_RESET
Skip calling of runtime_init_boot_locks_reset function during runtime init
0
PICO_RUNTIME_SKIP_INIT_CLOCKS
Skip calling of runtime_init_clocks function during runtime init
0
PICO_RUNTIME_SKIP_INIT_DEFAULT_ALARM_POOL
Skip calling of runtime_init_default_alarm_pool function during runtime init
1 if
PICO_TIME_DEFAULT_ALARM_POOL_DISABLED
is 1
PICO_RUNTIME_SKIP_INIT_EARLY_RESETS
Skip calling of runtime_init_early_resets function during runtime init
1 on RP2040
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 500

Name / Description Default
PICO_RUNTIME_SKIP_INIT_INSTALL_RAM_VECTOR_TABLE
Skip calling of runtime_init_install_ram_vector_table function during runtime
init
0 unless RISC-V or RAM binary
PICO_RUNTIME_SKIP_INIT_MUTEX
Skip calling of runtime_init_mutex function during runtime init
0
PICO_RUNTIME_SKIP_INIT_PER_CORE_BOOTROM_RESET
Skip calling of runtime_init_per_core_bootrom_reset function during per-core init
1 on RP2040
PICO_RUNTIME_SKIP_INIT_PER_CORE_ENABLE_COPROCESSORS
Skip calling of runtime_init_per_core_enable_coprocessors function during per-
core init
1 on RP2040 or RISC-V
PICO_RUNTIME_SKIP_INIT_PER_CORE_H3_IRQ_REGISTERS
Skip calling of runtime_init_per_core_h3_irq_registers function during per-core
init
1 on non RISC-V
PICO_RUNTIME_SKIP_INIT_PER_CORE_INSTALL_STACK_GUARD
Skip calling of runtime_init_per_core_install_stack_guard function during
runtime init
1 unless PICO_USE_STACK_GUARDS is 1
PICO_RUNTIME_SKIP_INIT_RP2040_GPIO_IE_DISABLE
Skip calling of runtime_init_rp2040_gpio_ie_disable function during runtime init
0 on RP2040
PICO_RUNTIME_SKIP_INIT_SPIN_LOCKS_RESET
Skip calling of runtime_init_spin_locks_reset function during runtime init
0
PICO_RUNTIME_SKIP_INIT_USB_POWER_DOWN
Skip calling of runtime_init_usb_power_down function during runtime init
0
PICO_SHARED_IRQ_HANDLER_DEFAULT_ORDER_PRIORITY
Set default shared IRQ order priority
0x80
PICO_SPINLOCK_ID_ATOMIC
Spinlock ID for atomics
13
PICO_SPINLOCK_ID_CLAIM_FREE_FIRST
Lowest Spinlock ID in the 'claim free' range
24
PICO_SPINLOCK_ID_CLAIM_FREE_LAST
Highest Spinlock ID in the 'claim free' range
31
PICO_SPINLOCK_ID_HARDWARE_CLAIM
Spinlock ID for Hardware claim protection
11
PICO_SPINLOCK_ID_IRQ
Spinlock ID for IRQ protection
9
PICO_SPINLOCK_ID_OS1
First Spinlock ID reserved for use by low level OS style software
14
PICO_SPINLOCK_ID_OS2
Second Spinlock ID reserved for use by low level OS style software
15
PICO_SPINLOCK_ID_RAND
Spinlock ID for Random Number Generator
12
PICO_SPINLOCK_ID_STRIPED_FIRST
Lowest Spinlock ID in the 'striped' range
16
PICO_SPINLOCK_ID_STRIPED_LAST
Highest Spinlock ID in the 'striped' range
23
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 501

Name / Description Default
PICO_SPINLOCK_ID_TIMER
Spinlock ID for Timer protection
10
PICO_STACK_SIZE
Minimum amount of stack space reserved in the linker script for each core.
See also PICO_CORE1_STACK_SIZE
0x800
PICO_STDIO_DEADLOCK_TIMEOUT_MS
Time after which to assume stdio_usb is deadlocked by use in IRQ and give up
1000
PICO_STDIO_DEFAULT_CRLF
Default for CR/LF conversion enabled on all stdio outputs
1
PICO_STDIO_ENABLE_CRLF_SUPPORT
Enable/disable CR/LF output conversion support
1
PICO_STDIO_RTT_DEFAULT_CRLF
Default state of CR/LF translation for rtt output
PICO_STDIO_DEFAULT_CRLF
PICO_STDIO_SEMIHOSTING_DEFAULT_CRLF
Default state of CR/LF translation for semihosting output
PICO_STDIO_DEFAULT_CRLF
PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS
Directly replace common stdio functions such as putchar from the C-library to
avoid pulling in lots of c library code for simple output
1
PICO_STDIO_STACK_BUFFER_SIZE
Define printf buffer size (on stack)… this is just a working buffer not a max
output size
128
PICO_STDIO_UART_DEFAULT_CRLF
Default state of CR/LF translation for UART output
PICO_STDIO_DEFAULT_CRLF
PICO_STDIO_UART_SUPPORT_CHARS_AVAILABLE_CALLBACK
Enable UART STDIO support for stdio_set_chars_available_callback. Can be
disabled to make use of the uart elsewhere
1
PICO_STDIO_USB_CONNECTION_WITHOUT_DTR
Disable use of DTR for connection checking meaning connection is assumed
to be valid
0
PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS
Maximum number of milliseconds to wait during initialization for a CDC
connection from the host (negative means indefinite) during initialization
0
PICO_STDIO_USB_DEFAULT_CRLF
Default state of CR/LF translation for USB output
PICO_STDIO_DEFAULT_CRLF
PICO_STDIO_USB_DEINIT_DELAY_MS
Number of milliseconds to wait before deinitializing stdio_usb
110
PICO_STDIO_USB_DEVICE_SELF_POWERED
Set USB device as self powered device
0
PICO_STDIO_USB_ENABLE_RESET_VIA_BAUD_RATE
Enable/disable resetting into BOOTSEL mode if the host sets the baud rate to
a magic value (PICO_STDIO_USB_RESET_MAGIC_BAUD_RATE)
1 if application is not using TinyUSB
directly
PICO_STDIO_USB_ENABLE_RESET_VIA_VENDOR_INTERFACE
Enable/disable resetting into BOOTSEL mode via an additional VENDOR USB
interface - enables picotool based reset
1 if application is not using TinyUSB
directly
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 502

Name / Description Default
PICO_STDIO_USB_LOW_PRIORITY_IRQ
Explicit User IRQ number to claim for tud_task() background execution instead
of letting the implementation pick a free one dynamically (deprecated)
PICO_STDIO_USB_POST_CONNECT_WAIT_DELAY_MS
Number of extra milliseconds to wait when using
PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS after a host CDC
connection is detected (some host terminals seem to sometimes lose
transmissions sent right after connection)
50
PICO_STDIO_USB_RESET_BOOTSEL_ACTIVITY_LED
Optionally define a pin to use as bootloader activity LED when BOOTSEL mode
is entered via USB (either VIA_BAUD_RATE or VIA_VENDOR_INTERFACE)
PICO_STDIO_USB_RESET_BOOTSEL_FIXED_ACTIVITY_LED
Whether the pin specified by
PICO_STDIO_USB_RESET_BOOTSEL_ACTIVITY_LED is fixed or can be
modified by picotool over the VENDOR USB interface
0
PICO_STDIO_USB_RESET_BOOTSEL_INTERFACE_DISABLE_MASK
Optionally disable either the mass storage interface (bit 0) or the PICOBOOT
interface (bit 1) when entering BOOTSEL mode via USB (either
VIA_BAUD_RATE or VIA_VENDOR_INTERFACE)
0
PICO_STDIO_USB_RESET_INTERFACE_SUPPORT_MS_OS_20_DESCRIPTOR
If vendor reset interface is included add support for Microsoft OS 2.0
Descriptor
1
PICO_STDIO_USB_RESET_INTERFACE_SUPPORT_RESET_TO_BOOTSEL
If vendor reset interface is included allow rebooting to BOOTSEL mode
1
PICO_STDIO_USB_RESET_INTERFACE_SUPPORT_RESET_TO_FLASH_BOOT
If vendor reset interface is included allow rebooting with regular flash boot
1
PICO_STDIO_USB_RESET_MAGIC_BAUD_RATE
baud rate that if selected causes a reset into BOOTSEL mode (if
PICO_STDIO_USB_ENABLE_RESET_VIA_BAUD_RATE is set)
1200
PICO_STDIO_USB_RESET_RESET_TO_FLASH_DELAY_MS
Delay in ms before rebooting via regular flash boot
100
PICO_STDIO_USB_STDOUT_TIMEOUT_US
Number of microseconds to be blocked trying to write USB output before
assuming the host has disappeared and discarding data
500000
PICO_STDIO_USB_SUPPORT_CHARS_AVAILABLE_CALLBACK
Enable USB STDIO support for stdio_set_chars_available_callback. Can be
disabled to make use of USB CDC RX callback elsewhere
1
PICO_STDIO_USB_TASK_INTERVAL_US
Period of microseconds between calling tud_task in the background
1000
PICO_STDOUT_MUTEX
Enable/disable mutex around stdout
1
PICO_TIME_DEFAULT_ALARM_POOL_DISABLED
Disable the default alarm pool
0
PICO_TIME_DEFAULT_ALARM_POOL_HARDWARE_ALARM_NUM
Select which HW alarm is used for the default alarm pool
3
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 503
Name / Description Default
PICO_TIME_DEFAULT_ALARM_POOL_MAX_TIMERS
Selects the maximum number of concurrent timers in the default alarm pool
16
PICO_TIME_SLEEP_OVERHEAD_ADJUST_US
How many microseconds to wake up early (and then busy_wait) to account for
timer overhead when sleeping in low power mode
6
PICO_UART_DEFAULT_CRLF
Enable/disable CR/LF translation on UART
0
PICO_UART_ENABLE_CRLF_SUPPORT
Enable/disable CR/LF translation support
1
PICO_USE_GPIO_COPROCESSOR
Enable/disable use of the GPIO coprocessor for GPIO access
1
PICO_USE_MALLOC_MUTEX
Whether to protect malloc etc with a mutex
1 with pico_multicore, 0 otherwise
PICO_USE_STACK_GUARDS
Enable/disable stack guards
0
PICO_USE_SW_SPIN_LOCKS
Use software implementation for spin locks
1 on RP2350 due to errata
PICO_VTABLE_PER_CORE
user is using separate vector tables per core
0
PICO_XOSC_STARTUP_DELAY_MULTIPLIER
Multiplier to lengthen xosc startup delay to accommodate slow-starting
oscillators
1
PLL_SYS_POSTDIV1
System clock PLL post divider 1 setting
6 on RP2040 5 or on RP2350
PLL_SYS_POSTDIV2
System clock PLL post divider 2 setting
2
PLL_SYS_REFDIV
PLL reference divider setting for PLL_SYS
1
PLL_SYS_VCO_FREQ_HZ
System clock PLL frequency
(1500 * MHZ)
PLL_USB_POSTDIV1
USB clock PLL post divider 1 setting
5
PLL_USB_POSTDIV2
USB clock PLL post divider 2 setting
5
PLL_USB_REFDIV
PLL reference divider setting for PLL_USB
1
PLL_USB_VCO_FREQ_HZ
USB clock PLL frequency
(1200 * MHZ)
SYS_CLK_HZ
System operating frequency in Hz
125000000
USB_CLK_HZ
USB clock frequency. Must be 48MHz for the USB interface to operate
correctly
48000000
Raspberry Pi Pico-series C/C++ SDK
5.1. Full List of SDK Configuration Defines 504


Chapter 6. CMake build
configuration
Use CMake cache variables to customize SDK builds.
6.1. Full List of SDK Configuration Variables
Table 35. SDK CMake
Configuration
Variables
Name / Description Default
PICO_BARE_METAL
Flag to exclude anything except base headers from the build
0
PICO_BOARD
Board name being built for. This may be specified in the user environment
(see Section 6.2)
pico or pico2
PICO_BOARD_CMAKE_DIRS
List of directories to look for <PICO_BOARD>.cmake in. This may be specified
in the user environment
PICO_BOARD_HEADER_DIRS
List of directories to look for <PICO_BOARD>.h in. This may be specified the
user environment
PICO_CMAKE_PRELOAD_PLATFORM_FILE
Custom CMake file to use to set up the platform environment
PICO_COMPILER
Specifies the compiler family to use (see Section 6.3)
PICO_DEFAULT_COMPILER which is
set based on PICO_PLATFORM
PICO_CONFIG_HEADER_FILES
List of extra header files to include from pico/config.h for all platforms
PICO_COPY_TO_RAM
Option to default all binaries to copy code from flash to SRAM before running
(see Section 6.4)
0
PICO_CXX_ENABLE_CXA_ATEXIT
Enable cxa-atexit
0
PICO_CXX_ENABLE_EXCEPTIONS
Enable CXX exception handling
0
PICO_CXX_ENABLE_RTTI
Enable CXX rtti
0
PICO_DEFAULT_BOOT_STAGE2
Simpler alternative to specifying PICO_DEFAULT_BOOT_STAGE2_FILE where
the latter is set to
src/rp2_common/boot_stage2/{PICO_DEFAULT_BOOT_STAGE2}.S
compile_time_choice
PICO_DEFAULT_BOOT_STAGE2_FILE
Default boot stage 2 file to use unless overridden by pico_set_boot_stage2 on
the TARGET; this setting is useful when explicitly setting the default build from
a per board CMake file
Raspberry Pi Pico-series C/C++ SDK
6.1. Full List of SDK Configuration Variables 506

Name / Description Default
PICO_DEFAULT_PIOASM_OUTPUT_FORMAT
Default output format used by pioasm when using pico_generate_pio_header
c-sdk
PICO_DEFAULT_RP2350_PLATFORM
Default actual platform to build for if rp2350 is specified for PICO_PLATFORM
e.g. rp2350-arm-s/rp2350-riscv
rp2350-arm-s
PICO_GCC_TRIPLE
List of GCC_TRIPLES — usually only one — to try when searching for a
compiler. This may be specified the user environment
PICO_DEFAULT_GCC_TRIPLE which is
set based on PICO_COMPILER
PICO_HOST_CONFIG_HEADER_FILES
List of extra header files to include from pico/config.h for the host platform
only
PICO_NO_COPRO_DIS
Disable disassembly listing postprocessing that disassembles RP2350
coprocessor instructions
0
PICO_NO_FLASH
Option to default all binaries to not use flash i.e. run from SRAM (see Section
6.4)
0
PICO_NO_GC_SECTIONS
Disable -ffunction-sections -fdata-sections and --gc-sections
0
PICO_NO_HARDWARE
Option as to whether the build is not targeting an RP2040 or RP2350 device
1 when PICO_PLATFORM is host, 0
otherwise
PICO_NO_PICOTOOL
Disable use/requirement for picotool meaning that UF2 output and
signing/hashing and coprocoessor disassembly will all be unavailable
0
PICO_NO_TARGET_NAME
Don’t define PICO_TARGET_NAME
0
PICO_NO_UF2
Disable UF2 output
0
PICO_ON_DEVICE
Option as to whether the build is targeting an RP2040 or RP2350 device
0 when PICO_PLATFORM is host, 1
otherwise
PICO_PLATFORM
Platform to build for e.g. rp2040/rp2350/rp2350-arm-s/rp2350-riscv/host.
This may be specified in the user environment (see Section 6.2)
based on PICO_BOARD or
environment value
PICO_RP2040_CONFIG_HEADER_FILES
List of extra header files to include from pico/config.h for the rp2040 platform
only
PICO_RP2350_ARM_S_CONFIG_HEADER_FILES
List of extra header files to include from pico/config.h for the rp2350-arm-s
platform only
PICO_RP2350_RISCV_CONFIG_HEADER_FILES
List of extra header files to include from pico/config.h for the riscv platform
only
PICO_SDK_VERSION_MAJOR
SDK major version number
Current SDK major version
Raspberry Pi Pico-series C/C++ SDK
6.1. Full List of SDK Configuration Variables 507

Name / Description Default
PICO_SDK_VERSION_MINOR
SDK minor version number
Current SDK minor version
PICO_SDK_VERSION_PRE_RELEASE_ID
Optional SDK pre-release version identifier
Current SDK pre-release identifier
PICO_SDK_VERSION_REVISION
SDK version revision
Current SDK revision
PICO_SDK_VERSION_STRING
SDK version string
Current SDK version string
PICO_STDIO_RTT
Option to globally enable stdio RTT for all targets by default
0
PICO_STDIO_SEMIHOSTING
Option to globally enable stdio semi-hosting for all targets by default
0
PICO_STDIO_UART
Option to globally enable stdio UART for all targets by default
1
PICO_STDIO_USB
Option to globally enable stdio USB for all targets by default
0
PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS
Maximum number of milliseconds to wait during initialization for a CDC
connection from the host (negative means indefinite) during initialization
0
PICO_TOOLCHAIN_PATH
Path to search for compiler (see Section 6.3)
none (i.e. search system paths)
PICO_USE_DEFAULT_MAX_PAGE_SIZE
Don’t shrink linker max page to 4096
0
6.2. Platform and Board Configuration
Passing PICO_BOARD=my_board_name to the CMake build (or specifying it in your environment) will cause the header
my_board_name.h to be included by all other SDK headers in order to provide #defines particular to the board you are using.
You may also wish to specify your own board configuration in which case you can set PICO_BOARD_HEADER_DIRS in the
environment or CMake to a semicolon separated list of paths to search for my_board_name.h.
On previous versions of the SDK there was generally little need for setting PICO_PLATFORM as the default value rp2040
selected RP2040 - the one and only RP-series microcontroller at the time.
SDK version 2.0.0 now supports the following RP-series microcontroller platforms along with the pre-existing value host
that can be used to build code for testing.
rp2040
Building for RP2040
rp2350-arm-s
Building for RP2350 on Arm processors; the "s" stands for secure, and means the binary runs directly from the
bootrom, when the processor is still in secure mode.
rp2350-riscv
Building for RP2350 on RISC-V processors.
Individual manufactured boards will usually support only one of either RP2040 or RP2350. To avoid having to specify
PICO_PLATFORM in addition to PICO_BOARD, specifying the latter can now automatically set the former (or vice versa).
Raspberry Pi Pico-series C/C++ SDK
6.2. Platform and Board Configuration 508

The following steps are applied in order, with the results from the previous step being used in the next:
1. If neither PICO_BOARD or PICO_PLATFORM is specified, PICO_PLATFORM defaults to PICO_DEFAULT_PLATFORM which itself defaults
to rp2040
2. If PICO_PLATFORM is specified and not PICO_BOARD, then PICO_BOARD is defaulted based on the value of PICO_PLATFORM:
◦
pico for PICO_PLATFORM=rp2040
◦
pico2 for PICO_PLATFORM=rp2350-arm-s or PICO_PLATFORM=rp2350-riscv
3. If PICO_BOARD is specified but not PICO_PLATFORM, PICO_PLATFORM will be set if a value for it is specified in the board
header.
Because most RP2350 boards allow both Arm and RISC-V development, rp2350 is also a valid value for PICO_PLATFORM, and
is often specified by a board header in step 3 above, but is always replaced with the value of PICO_DEFAULT_RP2350_PLATFORM
to allow the user their own preference. PICO_DEFAULT_RP2350_PLATFORM defaults to rp2350-arm-s if not otherwise specified.
NOTE
Both PICO_PLATFORM and PICO_BOARD are latched if they have been specified via the environment, on the first CMake
configuration; i.e. the value from the environment will not be used when configuring CMake subsequently in the
same existing build directory.
6.3. Compiler and Toolchain Configuration
The SDK supports building for Arm Cortex-M0 plus processors on RP2040 and for both Arm Cortex-M33 processors and
RISC-V Hazard3 processors on RP2350.
The SDK also supports building with either GCC or LLVM (clang) on Arm. See Section 2.10 for more details of supported
compilers.
6.3.1. Variables
The following variables are used to find and configure the right compiler.
6.3.1.1. PICO_COMPILER
This is usuually defaulted for you to a GCC compiler based on PICO_PLATFORM. However, you can select one of the
following values
•
pico_arm_gcc - Selects pico_arm_cortex_m0plus_gcc on RP2040 and pico_arm_cortex_m33_gcc on RP2350
•
pico_arm_cortex_m0plus_gcc - Configures GCC to build for Arm Cortex-M0 plus
•
pico_arm_cortex_m33_gcc - Configures GCC to build for Arm Cortex-M33
•
pico_arm_clang - Selects pico_arm_cortex_m0plus_clang on RP2040 and pico_arm_cortex_m33_clang on RP2350
•
pico_arm_cortex_m0plus_clang - Configures LLVM/clang to build for Arm Cortex-M0 plus
•
pico_arm_cortex_m33_clang - Configures LLVM/clang to build for Arm Cortex-M33
•
pico_riscv_gcc - Configures GCC to build for RISC-V Hazard3
•
pico_riscv_gcc_zcb_zcmp - Configures GCC to build for RISC-V Hazard3 using zcb and zcmp extensions that aren’t
supported by all compilers
Raspberry Pi Pico-series C/C++ SDK
6.3. Compiler and Toolchain Configuration 509

6.3.1.2. PICO_GCC_TRIPLE
This specifies one or more compiler "triples" to try when looking for a GCC compiler.
On Arm this defaults to arm-none-eabi.
On RISC-V this defaults to riscv32-unknown-elf;riscv32-corev-elf i.e. the two most common options are supported.
6.3.1.3. PICO_TOOLCHAIN_PATH
Armed with PICO_COMPILER and PICO_GCC_TRIPLE (if using GCC) the SDK will then search for a compiler. By default, it
searches the path, but PICO_TOOLCHAIN_PATH may be set to specify the root directory of a compiler toolchain install.
6.3.1.4. PICO_CLIB
Most programs for the SDK require a C-library. Generally your installed compiler will include the toolchain. In this case,
the SDK will try to detect either of the following runtimes, as which one is used effects how the SDK interacts with it.
•
newlib
•
picolibc
•
llvm-libc
The SDK sets PICO_CLIB to one of these values, however you can set it yourself first if you want to force a choice.
6.4. Binary Type configuration
These variables control how executables for RP-series microcontroller are laid out in memory. The default is for the
code and data to be entirely stored in flash with writable data (and some specifically marked) methods to copy into
RAM at startup.
Variable name Values Result
PICO_DEFAULT_BINARY_TYPE
default
Stores binaries in flash storage. Runs binaries from flash storage.
no_flash
Stores binaries in memory. Runs binaries from memory. Does not
require any flash storage. Note: You must reload this type of binary
after every reboot via UF2 file or debugger.
copy_to_ram
Stores binaries in flash, but copies them to memory (RAM) before
executing.
blocked_ram
PICO_NO_FLASH
0 / 1 Equivalent to PICO_DEFAULT_BINARY_TYPE=no_flash if =1.
PICO_COPY_TO_RAM
0 / 1 Equivalent to PICO_DEFAULT_BINARY_TYPE=copy_to_ram if =1.
PICO_USE_BLOCKED_RAM
0 / 1 Equivalent to PICO_DEFAULT_BINARY_TYPE=blocked_ram if =1.
Raspberry Pi Pico-series C/C++ SDK
6.4. Binary Type configuration 510

TIP
You can set the binary type for each executable target (as created by add_executable) by calling
pico_set_binary_type(target type) using the same type as PICO_DEFAULT_BINARY_TYPE.
Raspberry Pi Pico-series C/C++ SDK
6.4. Binary Type configuration 511

Chapter 7. CMake build functions
7.1. Control of picotool post-processing (not available on RP2040)
These functions control what post-processing is performed by picotool on the executables produced by the sdk. They
can be used to hash/sign binaries, package no_flash binaries, and embed partition tables into block loops. These
functions all set the specified target properties, and therefore if the property should be set for multiple targets then it
can be set manually with set_property or other CMake functions to set properties for a given scope.
pico_package_uf2_output(TARGET PACKADDR) Package a UF2 output to be written to the PACKADDR address.
This can be used with a no_flash binary to write the UF2 to flash
when dragging & dropping, and it will be copied to SRAM by the
bootrom before execution. This sets
PICOTOOL_UF2_PACKAGE_ADDR to PACKADDR.
pico_set_otp_key_output_file(TARGET OTPFILE) Output the public key hash and other necessary rows to an otp
JSON file. This sets PICOTOOL_OTP_FILE to OTPFILE.
pico_load_map_clear_sram(TARGET) Adds an entry to the load map to instruct the bootrom to clear all
of SRAM before loading the binary. This appends the --clear
argument to PICOTOOL_EXTRA_PROCESS_ARGS.
pico_set_binary_version(<TARGET> [MAJOR
<version>] [MINOR <version>] [ROLLBACK
<version>] [ROLLBACK_ROWS <rows…>])
Adds a version item to the metadata block, with the given major,
minor and rollback version, along with the rollback rows. These are
appended as arguments to PICOTOOL_EXTRA_PROCESS_ARGS if
setting the rollback version, or set as compile definitions if only
setting the major/minor versions.
pico_set_uf2_family(TARGET FAMILY) Set the UF2 family to use when creating the UF2. This sets
PICOTOOL_UF2_FAMILY to FAMILY.
pico_sign_binary(TARGET [SIGFILE]) Sign the target binary with the given PEM signature. This sets
PICOTOOL_SIGN_OUTPUT to true, PICOTOOL_SIGFILE to SIGFILE
(if specified), and PICOTOOL_OTP_FILE to ${TARGET}.otp.json (if
not already set). To specify a common SIGFILE for multiple targets,
the SIGFILE property can be set for a given scope, and then the
SIGFILE argument is optional.
pico_hash_binary(TARGET) Hash the target binary. This sets PICOTOOL_HASH_OUTPUT to
true.
pico_embed_pt_in_binary(TARGET PTFILE) Create the specified partition table from JSON, and embed it in the
block loop. This sets PICOTOOL_EMBED_PT to PTFILE.
pico_encrypt_binary(TARGET AESFILE [SIGFILE]) Encrypt the target binary with the given AES key (should be a binary
file containing 32 bytes of a random key), and sign the encrypted
binary. This sets PICOTOOL_AESFILE to AESFILE, and
PICOTOOL_ENC_SIGFILE to SIGFILE if present, else
PICOTOOL_SIGFILE.
Raspberry Pi Pico-series C/C++ SDK
Chapter 7. CMake build functions 512

Chapter 8. Board configuration
Board configuration is the process of customising the SDK to run on a specific board design. The SDK comes with
some predefined configurations for boards produced by Raspberry Pi and other manufacturers, the main (and default)
example being the Raspberry Pi Pico 2.
Configurations specify a number of parameters that could vary between hardware designs. For example, default UART
ports, on-board LED locations and flash capacities etc.
This chapter will go through where these configurations files are, how to make changes and set parameters, and how to
build your SDK using CMake with your customisations.
8.1. The Configuration files
Board specific configuration files are stored in the SDK source tree, at …/src/boards/include/boards/<boardname>.h. The
default configuration file is that for the Raspberry Pi Pico 2, and at the time of writing is:
<sdk_path>/src/boards/include/boards/pico.h
This relatively short file contains overrides from default of a small number of parameters used by the SDK when building
code.
SDK: https://github.com/raspberrypi/pico-sdk/blob/master/src/boards/include/boards/pico.h
Ê1 /*
Ê2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Ê7 // -----------------------------------------------------
Ê8 // NOTE: THIS HEADER IS ALSO INCLUDED BY ASSEMBLER SO
Ê9 // SHOULD ONLY CONSIST OF PREPROCESSOR DIRECTIVES
10 // -----------------------------------------------------
11
12 // This header may be included by other board headers as "boards/pico.h"
13
14 // pico_cmake_set PICO_PLATFORM=rp2040
15
16 #ifndef _BOARDS_PICO_H
17 #define _BOARDS_PICO_H
18
19 // For board detection
20 #define RASPBERRYPI_PICO
21
22 // --- UART ---
23 #ifndef PICO_DEFAULT_UART
24 #define PICO_DEFAULT_UART 0
25 #endif
26 #ifndef PICO_DEFAULT_UART_TX_PIN
27 #define PICO_DEFAULT_UART_TX_PIN 0
28 #endif
29 #ifndef PICO_DEFAULT_UART_RX_PIN
30 #define PICO_DEFAULT_UART_RX_PIN 1
31 #endif
32
33 // --- LED ---
34 #ifndef PICO_DEFAULT_LED_PIN
Raspberry Pi Pico-series C/C++ SDK
8.1. The Configuration files 513

35 #define PICO_DEFAULT_LED_PIN 25
36 #endif
37 // no PICO_DEFAULT_WS2812_PIN
38
39 // --- I2C ---
40 #ifndef PICO_DEFAULT_I2C
41 #define PICO_DEFAULT_I2C 0
42 #endif
43 #ifndef PICO_DEFAULT_I2C_SDA_PIN
44 #define PICO_DEFAULT_I2C_SDA_PIN 4
45 #endif
46 #ifndef PICO_DEFAULT_I2C_SCL_PIN
47 #define PICO_DEFAULT_I2C_SCL_PIN 5
48 #endif
49
50 // --- SPI ---
51 #ifndef PICO_DEFAULT_SPI
52 #define PICO_DEFAULT_SPI 0
53 #endif
54 #ifndef PICO_DEFAULT_SPI_SCK_PIN
55 #define PICO_DEFAULT_SPI_SCK_PIN 18
56 #endif
57 #ifndef PICO_DEFAULT_SPI_TX_PIN
58 #define PICO_DEFAULT_SPI_TX_PIN 19
59 #endif
60 #ifndef PICO_DEFAULT_SPI_RX_PIN
61 #define PICO_DEFAULT_SPI_RX_PIN 16
62 #endif
63 #ifndef PICO_DEFAULT_SPI_CSN_PIN
64 #define PICO_DEFAULT_SPI_CSN_PIN 17
65 #endif
66
67 // --- FLASH ---
68
69 #define PICO_BOOT_STAGE2_CHOOSE_W25Q080 1
70
71 #ifndef PICO_FLASH_SPI_CLKDIV
72 #define PICO_FLASH_SPI_CLKDIV 2
73 #endif
74
75 // pico_cmake_set_default PICO_FLASH_SIZE_BYTES = (2 * 1024 * 1024)
76 #ifndef PICO_FLASH_SIZE_BYTES
77 #define PICO_FLASH_SIZE_BYTES (2 * 1024 * 1024)
78 #endif
79 // Drive high to force power supply into PWM mode (lower ripple on 3V3 at light loads)
80 #define PICO_SMPS_MODE_PIN 23
81
82 #ifndef PICO_RP2040_B0_SUPPORTED
83 #define PICO_RP2040_B0_SUPPORTED 1
84 #endif
85
86 // The GPIO Pin used to read VBUS to determine if the device is battery powered.
87 #ifndef PICO_VBUS_PIN
88 #define PICO_VBUS_PIN 24
89 #endif
90
91 // The GPIO Pin used to monitor VSYS. Typically you would use this with ADC.
92 // There is an example in adc/read_vsys in pico-examples.
93 #ifndef PICO_VSYS_PIN
94 #define PICO_VSYS_PIN 29
95 #endif
96
97 #endif
Raspberry Pi Pico-series C/C++ SDK
8.1. The Configuration files 514

As can be seen, it sets up the default UART to uart0, the GPIO pins to be used for that UART, the GPIO pin used for the
on-board LED, and the flash size.
To create your own configuration file, create a file in the board ../source/folder with the name of your board, for
example, myboard.h. Enter your board specific parameters in this file.
8.2. Building applications with a custom board
configuration
The CMake system is what specifies which board configuration is going to be used.
To create a new build based on a new board configuration (we will use the myboard example from the previous section)
first create a new build folder under your project folder. For our example we will use the pico-examples folder.
$ cd pico-examples
$ mkdir myboard_build
$ cd myboard_build
then run cmake as follows:
$ cmake -D"PICO_BOARD=myboard" ..
This will set up the system ready to build so you can simply type make in the myboard_build folder and the examples will be
built for your new board configuration.
8.3. Available configuration parameters
Table 34 lists all the available configuration parameters available within the SDK. You can set any configuration variable
in a board configuration header file, however the convention is to limit that to configuration items directly affected by
the board design (e.g. pins, clock frequencies etc.) Other configuration items should generally be overridden in the
CMake configuration (or another configuration header) for the application being built.
Raspberry Pi Pico-series C/C++ SDK
8.2. Building applications with a custom board configuration 515

Chapter 9. Embedded Binary
Information
Binary information is machine-readable information embedded in a binary by the SDK (or other development tools) such
that it can be read by `picotool` or other tooling.
9.1. Basic information
This information is really handy when you pick up a Pico-series device and don’t know what is on it!
Basic information includes
•
program name
•
program description
•
program version string
•
program build date
•
program url
•
program end address
•
program features, this is a list built from individual strings in the binary, that can be displayed (e.g. we will have one
for UART stdio and one for USB stdio) in the SDK
•
build attributes, this is a similar list of strings, for things pertaining to the binary itself (e.g. Debug Build)
9.2. Pins
This is certainly handy when you have an executable called hello_serial.elf but you forgot what Raspberry Pi
microcontroller-based board it was built for, as different boards may have different pins broken out.
Static (fixed) pin assignments can be recorded in the binary in very compact form:
$ picotool info --pins sprite_demo.elf
File sprite_demo.elf:
Fixed Pin Information
0-4: Red 0-4
6-10: Green 0-4
11-15: Blue 0-4
16: HSync
17: VSync
18: Display Enable
19: Pixel Clock
20: UART1 TX
21: UART1 RX
Raspberry Pi Pico-series C/C++ SDK
9.1. Basic information 516
9.3. Full Information
Full information is available with the -a option:
$ picotool info -a i2c_bus_scan.elf
File i2c_bus_scan.elf:
Program Information
Êname: i2c_bus_scan
Êweb site: https://github.com/raspberrypi/pico-examples/tree/HEAD/i2c/bus_scan
Êfeatures: UART stdin / stdout
Êbinary start: 0x10000000
Êbinary end: 0x10004c74
Fixed Pin Information
Ê0: UART0 TX
Ê1: UART0 RX
Ê4: I2C0 SDA
Ê5: I2C0 SCL
Build Information
Êsdk version: 2.0.0-develop
Êpico_board: pico
Êbuild date: Aug 1 2024
Êbuild attributes: Debug
9.4. Including Binary Information
Binary information is declared in the program by macros; for the following example:
$ picotool info --pins sprite_demo.elf
File sprite_demo.elf:
Fixed Pin Information
0-4: Red 0-4
6-10: Green 0-4
11-15: Blue 0-4
16: HSync
17: VSync
18: Display Enable
19: Pixel Clock
20: UART1 TX
21: UART1 RX
There is one line in the setup_default_uart function:
bi_decl_if_func_used(bi_2pins_with_func(PICO_DEFAULT_UART_RX_PIN, PICO_DEFAULT_UART_TX_PIN,
GPIO_FUNC_UART));
The two pin numbers, and the function UART are stored, then decoded to their actual function names (UART1 TX etc) by
picotool. The bi_decl_if_func_used makes sure the binary information is only included if the containing function is called.
Equally, the video code contains a few lines like this:
Raspberry Pi Pico-series C/C++ SDK
9.3. Full Information 517

bi_decl_if_func_used(bi_pin_mask_with_name(0x1f << (PICO_SCANVIDEO_COLOR_PIN_BASE +
PICO_SCANVIDEO_DPI_PIXEL_RSHIFT), "Red 0-4"));
The macros are designed to waste as little space as possible, but you can turn everything off with preprocessor var
PICO_NO_BINARY_INFO=1. Additionally, any SDK code that inserts binary info can be separately excluded by its own
preprocessor var.
To ad your own binary info, you need:
#include "pico/binary_info.h"
There are a bunch of bi_ macros in the headers
#define bi_binary_end(end)
#define bi_program_name(name)
#define bi_program_description(description)
#define bi_program_version_string(version_string)
#define bi_program_build_date_string(date_string)
#define bi_program_url(url)
#define bi_program_feature(feature)
#define bi_program_build_attribute(attr)
#define bi_1pin_with_func(p0, func)
#define bi_2pins_with_func(p0, p1, func)
#define bi_3pins_with_func(p0, p1, p2, func)
#define bi_4pins_with_func(p0, p1, p2, p3, func)
#define bi_5pins_with_func(p0, p1, p2, p3, p4, func)
#define bi_pin_range_with_func(plo, phi, func)
#define bi_pin_mask_with_name(pmask, label)
#define bi_pin_mask_with_names(pmask, label)
#define bi_1pin_with_name(p0, name)
#define bi_2pins_with_names(p0, name0, p1, name1)
#define bi_3pins_with_names(p0, name0, p1, name1, p2, name2)
#define bi_4pins_with_names(p0, name0, p1, name1, p2, name2, p3, name3)
which make use of underlying macros, e.g.
#define bi_program_url(url) bi_string(BINARY_INFO_TAG_RASPBERRY_PI, BINARY_INFO_ID_RP_PROGRAM_URL,
url)
You then either use bi_decl(bi_blah(…)) for unconditional inclusion of the binary info blah, or
bi_decl_if_func_used(bi_blah(…)) for binary information that may be stripped if the enclosing function is not included in
the binary by the linker (think --gc-sections).
For example,
Ê1 #include <stdio.h>
Ê2 #include "pico/stdlib.h"
Ê3 #include "hardware/gpio.h"
Ê4 #include "pico/binary_info.h"
Ê5
Ê6 const uint LED_PIN = 25;
Ê7
Ê8 int main() {
Raspberry Pi Pico-series C/C++ SDK
9.4. Including Binary Information 518

Ê9
10 bi_decl(bi_program_description("This is a test binary."));
11 bi_decl(bi_1pin_with_name(LED_PIN, "On-board LED"));
12
13 setup_default_uart();
14 gpio_set_function(LED_PIN, GPIO_FUNC_PROC);
15 gpio_set_dir(LED_PIN, GPIO_OUT);
16 while (1) {
17 gpio_put(LED_PIN, 0);
18 sleep_ms(250);
19 gpio_put(LED_PIN, 1);
20 puts("Hello World\n");
21 sleep_ms(1000);
22 }
23 }
when queried with picotool,
$ sudo picotool info -a test.uf2
File test.uf2:
Program Information
Êname: test
Êdescription: This is a test binary.
Êfeatures: stdout to UART
Êbinary start: 0x10000000
Êbinary end: 0x100031f8
Fixed Pin Information
Ê0: UART0 TX
Ê1: UART0 RX
Ê25: On-board LED
Build Information
Êbuild date: Jan 4 2021
shows our information strings in the output.
9.5. Setting Common Information from CMake
You can also set fields directly from your project’s CMake file, e.g.,
pico_set_program_name(foo "not foo") ①
pico_set_program_description(foo "this is a foo")
pico_set_program_version_string(foo "0.00001a")
pico_set_program_url(foo "www.plinth.com/foo")
1. The name "foo" would be the default.
Raspberry Pi Pico-series C/C++ SDK
9.5. Setting Common Information from CMake 519

NOTE
All of these are passed as command line arguments to the compilation, so if you plan to use quotes, newlines etc.
you may have better luck defining it using bi_decl in the code.
Raspberry Pi Pico-series C/C++ SDK
9.5. Setting Common Information from CMake 520

Appendix A: App Notes
Attaching a 7 segment LED via GPIO
This example code shows how to interface the Raspberry Pi Pico to a generic 7 segment LED device. It uses the LED to
count from 0 to 9 and then repeat. If the button is pressed, then the numbers will count down instead of up.
Wiring information
Our 7 Segment display has pins as follows.
Ê --A--
Ê F B
Ê --G--
Ê E C
Ê --D--
By default we are allocating GPIO 2 to segment A, 3 to B etc. So, connect GPIO 2 to pin A on the 7 segment LED display
and so on. You will need the appropriate resistors (68 ohm should be fine) for each segment. The LED device used here
is common anode, so the anode pin is connected to the 3.3v supply, and the GPIOs need to pull low (to ground) to
complete the circuit. The pull direction of the GPIOs is specified in the code itself.
Connect the switch to connect on pressing. One side should be connected to ground, the other to GPIO 9.
Figure 9. Wiring
Diagram for 7
segment LED.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/gpio/hello_7segment/CMakeLists.txt
Ê1 add_executable(hello_7segment
Ê2 hello_7segment.c
Ê3 )
Ê4
Ê5 # pull in common dependencies
Ê6 target_link_libraries(hello_7segment pico_stdlib)
Ê7
Raspberry Pi Pico-series C/C++ SDK
Attaching a 7 segment LED via GPIO 521

Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(hello_7segment)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(hello_7segment)
hello_7segment.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/gpio/hello_7segment/hello_7segment.c
Ê1 /**
Ê2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Ê7 #include <stdio.h>
Ê8 #include "pico/stdlib.h"
Ê9 #include "hardware/gpio.h"
10
11 /*
12 Our 7 Segment display has pins as follows:
13
14 --A--
15 F B
16 --G--
17 E C
18 --D--
19
20 By default we are allocating GPIO 2 to segment A, 3 to B etc.
21 So, connect GPIO 2 to pin A on the 7 segment LED display etc. Don't forget
22 the appropriate resistors, best to use one for each segment!
23
24 Connect button so that pressing the switch connects the GPIO 9 (default) to
25 ground (pull down)
26 */
27
28 #define FIRST_GPIO 2
29 #define BUTTON_GPIO (FIRST_GPIO+7)
30
31 // This array converts a number 0-9 to a bit pattern to send to the GPIOs
32 int bits[10] = {
33 0x3f, // 0
34 0x06, // 1
35 0x5b, // 2
36 0x4f, // 3
37 0x66, // 4
38 0x6d, // 5
39 0x7d, // 6
40 0x07, // 7
41 0x7f, // 8
42 0x67 // 9
43 };
44
45 /// \tag::hello_gpio[]
46 int main() {
47 stdio_init_all();
48 printf("Hello, 7segment - press button to count down!\n");
49
50 // We could use gpio_set_dir_out_masked() here
51 for (int gpio = FIRST_GPIO; gpio < FIRST_GPIO + 7; gpio++) {
Raspberry Pi Pico-series C/C++ SDK
Attaching a 7 segment LED via GPIO 522

52 gpio_init(gpio);
53 gpio_set_dir(gpio, GPIO_OUT);
54 // Our bitmap above has a bit set where we need an LED on, BUT, we are pulling low to
Ê light
55 // so invert our output
56 gpio_set_outover(gpio, GPIO_OVERRIDE_INVERT);
57 }
58
59 gpio_init(BUTTON_GPIO);
60 gpio_set_dir(BUTTON_GPIO, GPIO_IN);
61 // We are using the button to pull down to 0v when pressed, so ensure that when
62 // unpressed, it uses internal pull ups. Otherwise when unpressed, the input will
63 // be floating.
64 gpio_pull_up(BUTTON_GPIO);
65
66 int val = 0;
67 while (true) {
68 // Count upwards or downwards depending on button input
69 // We are pulling down on switch active, so invert the get to make
70 // a press count downwards
71 if (!gpio_get(BUTTON_GPIO)) {
72 if (val == 9) {
73 val = 0;
74 } else {
75 val++;
76 }
77 } else if (val == 0) {
78 val = 9;
79 } else {
80 val--;
81 }
82
83 // We are starting with GPIO 2, our bitmap starts at bit 0 so shift to start at 2.
84 int32_t mask = bits[val] << FIRST_GPIO;
85
86 // Set all our GPIOs in one go!
87 // If something else is using GPIO, we might want to use gpio_put_masked()
88 gpio_set_mask(mask);
89 sleep_ms(250);
90 gpio_clr_mask(mask);
91 }
92 }
93 /// \end::hello_gpio[]
Bill of Materials
Table 36. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
7 segment LED module 1 generic part
68 ohm resistor 7 generic part
DIL push to make switch 1 generic switch
M/M Jumper wires 10 generic part
Raspberry Pi Pico-series C/C++ SDK
Attaching a 7 segment LED via GPIO 523

DHT-11, DHT-22, and AM2302 Sensors
The DHT sensors are fairly well known hobbyist sensors for measuring relative humidity and temperature using a
capacitive humidity sensor, and a thermistor. While they are slow, one reading every ~2 seconds, they are reliable and
good for basic data logging. Communication is based on a custom protocol which uses a single wire for data.
NOTE
The DHT-11 and DHT-22 sensors are the most common. They use the same protocol but have different
characteristics, the DHT-22 has better accuracy, and has a larger sensor range than the DHT-11. The sensor is
available from a number of retailers.
Wiring information
See Figure 10 for wiring instructions.
Figure 10. Wiring the
DHT-22 temperature
sensor to Raspberry Pi
Pico, and connecting
Pico’s UART0 to the
Raspberry Pi 4.
NOTE
One of the pins (pin 3) on the DHT sensor will not be connected, it is not used.
You will want to place a 10 kΩ resistor between VCC and the data pin, to act as a medium-strength pull up on the data
line.
Connecting UART0 of Pico to Raspberry Pi as in Figure 10 and you should see something similar to Figure 11 in minicom
when connected to /dev/serial0 on the Raspberry Pi.
Raspberry Pi Pico-series C/C++ SDK
DHT-11, DHT-22, and AM2302 Sensors 524

Figure 11. Serial
output over Pico’s
UART0 in a terminal
window.
Connect to /dev/serial0 by typing,
$ minicom -b 115200 -o -D /dev/serial0
at the command line.
List of Files
A list of files with descriptions of their function;
CMakeLists.txt
Make file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/gpio/dht_sensor/CMakeLists.txt
Ê1 add_executable(dht
Ê2 dht.c
Ê3 )
Ê4
Ê5 target_link_libraries(dht pico_stdlib)
Ê6
Ê7 pico_add_extra_outputs(dht)
Ê8
Ê9 # add url via pico_set_program_url
10 example_auto_set_url(dht)
dht.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/gpio/dht_sensor/dht.c
Ê1 /**
Ê2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
Ê3 *
Raspberry Pi Pico-series C/C++ SDK
DHT-11, DHT-22, and AM2302 Sensors 525

Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 **/
Ê6
Ê7 #include <stdio.h>
Ê8 #include <math.h>
Ê9 #include "pico/stdlib.h"
10 #include "hardware/gpio.h"
11
12 #ifdef PICO_DEFAULT_LED_PIN
13 #define LED_PIN PICO_DEFAULT_LED_PIN
14 #endif
15
16 const uint DHT_PIN = 15;
17 const uint MAX_TIMINGS = 85;
18
19 typedef struct {
20 float humidity;
21 float temp_celsius;
22 } dht_reading;
23
24 void read_from_dht(dht_reading *result);
25
26 int main() {
27 stdio_init_all();
28 gpio_init(DHT_PIN);
29 #ifdef LED_PIN
30 gpio_init(LED_PIN);
31 gpio_set_dir(LED_PIN, GPIO_OUT);
32 #endif
33 while (1) {
34 dht_reading reading;
35 read_from_dht(&reading);
36 float fahrenheit = (reading.temp_celsius * 9 / 5) + 32;
37 printf("Humidity = %.1f%%, Temperature = %.1fC (%.1fF)\n",
38 reading.humidity, reading.temp_celsius, fahrenheit);
39
40 sleep_ms(2000);
41 }
42 }
43
44 void read_from_dht(dht_reading *result) {
45 int data[5] = {0, 0, 0, 0, 0};
46 uint last = 1;
47 uint j = 0;
48
49 gpio_set_dir(DHT_PIN, GPIO_OUT);
50 gpio_put(DHT_PIN, 0);
51 sleep_ms(20);
52 gpio_set_dir(DHT_PIN, GPIO_IN);
53
54 #ifdef LED_PIN
55 gpio_put(LED_PIN, 1);
56 #endif
57 for (uint i = 0; i < MAX_TIMINGS; i++) {
58 uint count = 0;
59 while (gpio_get(DHT_PIN) == last) {
60 count++;
61 sleep_us(1);
62 if (count == 255) break;
63 }
64 last = gpio_get(DHT_PIN);
65 if (count == 255) break;
66
67 if ((i >= 4) && (i % 2 == 0)) {
Raspberry Pi Pico-series C/C++ SDK
DHT-11, DHT-22, and AM2302 Sensors 526

68 data[j / 8] <<= 1;
69 if (count > 16) data[j / 8] |= 1;
70 j++;
71 }
72 }
73 #ifdef LED_PIN
74 gpio_put(LED_PIN, 0);
75 #endif
76
77 if ((j >= 40) && (data[4] == ((data[0] + data[1] + data[2] + data[3]) & 0xFF))) {
78 result->humidity = (float) ((data[0] << 8) + data[1]) / 10;
79 if (result->humidity > 100) {
80 result->humidity = data[0];
81 }
82 result->temp_celsius = (float) (((data[2] & 0x7F) << 8) + data[3]) / 10;
83 if (result->temp_celsius > 125) {
84 result->temp_celsius = data[2];
85 }
86 if (data[2] & 0x80) {
87 result->temp_celsius = -result->temp_celsius;
88 }
89 } else {
90 printf("Bad data\n");
91 }
92 }
Bill of Materials
Table 37. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
10 kΩ resistor 1 generic part
M/M Jumper wires 4 generic part
DHT-22 sensor 1 generic part
Attaching a 16x2 LCD via TTL
This example code shows how to interface the Raspberry Pi Pico to one of the very common 16x2 LCD character
displays. Due to the large number of pins these displays use, they are commonly used with extra drivers or backpacks.
In this example, we will use an Adafruit LCD display backpack, which supports communication over USB or TTL. A
monochrome display with an RGB backlight is also used, but the backpack is compatible with monochrome backlight
displays too. There is another example that uses I2C to control a 16x2 display.
The backpack processes a set of commands that are documented here and preceded by the "special" byte 0xFE. The
backpack does the ASCII character conversion and even supports custom character creation. In this example, we use
the Pico’s primary UART (uart0) to read characters from our computer and send them via the other UART (uart1) to print
them onto the LCD. We also define a special startup sequence and vary the display’s backlight color.
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via TTL 527

NOTE
You can change where stdio output goes (Pico’s USB, uart0 or both) with CMake directives. The CMakeLists.txt file
shows how to enable both.
Wiring information
Wiring up the backpack to the Pico requires 3 jumpers, to connect VCC (3.3v), GND, TX. The example here uses both of
the Pico’s UARTs, one (uart0) for stdio and the other (uart1) for communication with the backpack. Pin 8 is used as the
TX pin. Power is supplied from the 3.3V pin. To connect the backpack to the display, it is common practice to solder it
onto the back of the display, or during the prototyping stage to use the same parallel lanes on a breadboard.
NOTE
While this display will work at 3.3V, it will be quite dim. Using a 5V source will make it brighter.
Figure 12. Wiring
Diagram for LCD with
TTL backpack.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/uart/lcd_uart/CMakeLists.txt
Ê1 add_executable(lcd_uart
Ê2 lcd_uart.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional uart hardware support
Ê6 target_link_libraries(lcd_uart pico_stdlib hardware_uart)
Ê7
Ê8 # enable usb output and uart output
Ê9 # modify here as required
10 pico_enable_stdio_usb(lcd_uart 1)
11 pico_enable_stdio_uart(lcd_uart 1)
12
13 # create map/bin/hex file etc.
14 pico_add_extra_outputs(lcd_uart)
15
16 # add url via pico_set_program_url
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via TTL 528

17 example_auto_set_url(lcd_uart)
lcd_uart.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/uart/lcd_uart/lcd_uart.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 /* Example code to drive a 16x2 LCD panel via an Adafruit TTL LCD "backpack"
ÊÊ8
ÊÊ9 Optionally, the backpack can be connected the VBUS (pin 40) at 5V if
Ê10 the Pico in question is powered by USB for greater brightness.
Ê11
Ê12 If this is done, then no other connections should be made to the backpack apart
Ê13 from those listed below as the backpack's logic levels will change.
Ê14
Ê15 Connections on Raspberry Pi Pico board, other boards may vary.
Ê16
Ê17 GPIO 8 (pin 11)-> RX on backpack
Ê18 3.3v (pin 36) -> 3.3v on backpack
Ê19 GND (pin 38) -> GND on backpack
Ê20 */
Ê21
Ê22 #include <stdio.h>
Ê23 #include <math.h>
Ê24 #include "pico/stdlib.h"
Ê25 #include "pico/binary_info.h"
Ê26 #include "hardware/uart.h"
Ê27
Ê28 // leave uart0 free for stdio
Ê29 #define UART_ID uart1
Ê30 #define BAUD_RATE 9600
Ê31 #define UART_TX_PIN 8
Ê32 #define LCD_WIDTH 16
Ê33 #define LCD_HEIGHT 2
Ê34
Ê35 // basic commands
Ê36 #define LCD_DISPLAY_ON 0x42
Ê37 #define LCD_DISPLAY_OFF 0x46
Ê38 #define LCD_SET_BRIGHTNESS 0x99
Ê39 #define LCD_SET_CONTRAST 0x50
Ê40 #define LCD_AUTOSCROLL_ON 0x51
Ê41 #define LCD_AUTOSCROLL_OFF 0x52
Ê42 #define LCD_CLEAR_SCREEN 0x58
Ê43 #define LCD_SET_SPLASH 0x40
Ê44
Ê45 // cursor commands
Ê46 #define LCD_SET_CURSOR_POS 0x47
Ê47 #define LCD_CURSOR_HOME 0x48
Ê48 #define LCD_CURSOR_BACK 0x4C
Ê49 #define LCD_CURSOR_FORWARD 0x4D
Ê50 #define LCD_UNDERLINE_CURSOR_ON 0x4A
Ê51 #define LCD_UNDERLINE_CURSOR_OFF 0x4B
Ê52 #define LCD_BLOCK_CURSOR_ON 0x53
Ê53 #define LCD_BLOCK_CURSOR_OFF 0x54
Ê54
Ê55 // rgb commands
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via TTL 529

Ê56 #define LCD_SET_BACKLIGHT_COLOR 0xD0
Ê57 #define LCD_SET_DISPLAY_SIZE 0xD1
Ê58
Ê59 // change to 0 if display is not RGB capable
Ê60 #define LCD_IS_RGB 1
Ê61
Ê62 void lcd_write(uint8_t cmd, uint8_t* buf, uint8_t buflen) {
Ê63 // all commands are prefixed with 0xFE
Ê64 const uint8_t pre = 0xFE;
Ê65 uart_write_blocking(UART_ID, &pre, 1);
Ê66 uart_write_blocking(UART_ID, &cmd, 1);
Ê67 uart_write_blocking(UART_ID, buf, buflen);
Ê68 sleep_ms(10); // give the display some time
Ê69 }
Ê70
Ê71 void lcd_set_size(uint8_t w, uint8_t h) {
Ê72 // sets the dimensions of the display
Ê73 uint8_t buf[] = { w, h };
Ê74 lcd_write(LCD_SET_DISPLAY_SIZE, buf, 2);
Ê75 }
Ê76
Ê77 void lcd_set_contrast(uint8_t contrast) {
Ê78 // sets the display contrast
Ê79 lcd_write(LCD_SET_CONTRAST, &contrast, 1);
Ê80 }
Ê81
Ê82 void lcd_set_brightness(uint8_t brightness) {
Ê83 // sets the backlight brightness
Ê84 lcd_write(LCD_SET_BRIGHTNESS, &brightness, 1);
Ê85 }
Ê86
Ê87 void lcd_set_cursor(bool is_on) {
Ê88 // set is_on to true if we want the blinking block and underline cursor to show
Ê89 if (is_on) {
Ê90 lcd_write(LCD_BLOCK_CURSOR_ON, NULL, 0);
Ê91 lcd_write(LCD_UNDERLINE_CURSOR_ON, NULL, 0);
Ê92 } else {
Ê93 lcd_write(LCD_BLOCK_CURSOR_OFF, NULL, 0);
Ê94 lcd_write(LCD_UNDERLINE_CURSOR_OFF, NULL, 0);
Ê95 }
Ê96 }
Ê97
Ê98 void lcd_set_backlight(bool is_on) {
Ê99 // turn the backlight on (true) or off (false)
100 if (is_on) {
101 lcd_write(LCD_DISPLAY_ON, (uint8_t *) 0, 1);
102 } else {
103 lcd_write(LCD_DISPLAY_OFF, NULL, 0);
104 }
105 }
106
107 void lcd_clear() {
108 // clear the contents of the display
109 lcd_write(LCD_CLEAR_SCREEN, NULL, 0);
110 }
111
112 void lcd_cursor_reset() {
113 // reset the cursor to (1, 1)
114 lcd_write(LCD_CURSOR_HOME, NULL, 0);
115 }
116
117 #if LCD_IS_RGB
118 void lcd_set_backlight_color(uint8_t r, uint8_t g, uint8_t b) {
119 // only supported on RGB displays!
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via TTL 530

120 uint8_t buf[] = { r, g, b };
121 lcd_write(LCD_SET_BACKLIGHT_COLOR, buf, 3);
122 }
123 #endif
124
125 void lcd_init() {
126 lcd_set_backlight(true);
127 lcd_set_size(LCD_WIDTH, LCD_HEIGHT);
128 lcd_set_contrast(155);
129 lcd_set_brightness(255);
130 lcd_set_cursor(false);
131 }
132
133 int main() {
134 stdio_init_all();
135 uart_init(UART_ID, BAUD_RATE);
136 uart_set_translate_crlf(UART_ID, false);
137 gpio_set_function(UART_TX_PIN, UART_FUNCSEL_NUM(UART_ID, UART_TX_PIN));
138
139 bi_decl(bi_1pin_with_func(UART_TX_PIN, UART_FUNCSEL_NUM(UART_ID, UART_TX_PIN)));
140
141 lcd_init();
142
143 // define startup sequence and save to EEPROM
144 // no more or less than 32 chars, if not enough, fill remaining ones with spaces
145 uint8_t splash_buf[] = "Hello LCD, from Pi Towers! ";
146 lcd_write(LCD_SET_SPLASH, splash_buf, LCD_WIDTH * LCD_HEIGHT);
147
148 lcd_cursor_reset();
149 lcd_clear();
150
151 #if LCD_IS_RGB
152 uint8_t i = 0; // it's ok if this overflows and wraps, we're using sin
153 const float frequency = 0.1f;
154 uint8_t red, green, blue;
155 #endif
156
157 while (1) {
158 // send any chars from stdio straight to the backpack
159 char c = getchar();
160 // any bytes not followed by 0xFE (the special command) are interpreted
161 // as text to be displayed on the backpack, so we just send the char
162 // down the UART byte pipe!
163 if (c < 128) uart_putc_raw(UART_ID, c); // skip extra non-ASCII chars
164 #if LCD_IS_RGB
165 // change the display color on keypress, rainbow style!
166 red = (uint8_t)(sin(frequency * i + 0) * 127 + 128);
167 green = (uint8_t)(sin(frequency * i + 2) * 127 + 128);
168 blue = (uint8_t)(sin(frequency * i + 4) * 127 + 128);
169 lcd_set_backlight_color(red, green, blue);
170 i++;
171 #endif
172 }
173 }
Bill of Materials
Table 38. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via TTL 531

Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
16x2 RGB LCD panel 3.3v 1 generic part, available on Adafruit
16x2 LCD backpack 1 from Adafruit
M/M Jumper wires 3 generic part
Attaching a microphone using the ADC
This example code shows how to interface the Raspberry Pi Pico with a standard analog microphone via the onboard
analog to digital converter (ADC). In this example, we use an ICS-40180 breakout board by SparkFun but any analog
microphone should be compatible with this tutorial. SparkFun have written a guide for this board that goes into more
detail about the board and how it works.
TIP
An analog to digital converter (ADC) is responsible for reading continually varying input signals that may range from
0 to a specified reference voltage (in the Pico’s case this reference voltage is set by the supply voltage and can be
measured on pin 35, ADC_VREF) and converting them into binary, i.e. a number that can be digitally stored.
The Pico has a 12-bit ADC (ENOB of 8.7-bit, see RP2040 datasheet section 4.9.3 for more details), meaning that a read
operation will return a number ranging from 0 to 4095 (2^12 - 1) for a total of 4096 possible values. Therefore, the
resolution of the ADC is 3.3/4096, so roughly steps of 0.8 millivolts. The SparkFun breakout uses an OPA344
operational amplifier to boost the signal coming from the microphone to voltage levels that can be easily read by the
ADC. An important side effect is that a bias of 0.5*Vcc is added to the signal, even when the microphone is not picking
up any sound.
The ADC provides us with a raw voltage value but when dealing with sound, we’re more interested in the amplitude of
the audio signal. This is defined as one half the peak-to-peak amplitude. Included with this example is a very simple
Python script that will plot the voltage values it receives via the serial port. By tweaking the sampling rates, and various
other parameters, the data from the microphone can be analysed in various ways, such as in a Fast Fourier Transform
to see what frequencies make up the signal.
Figure 13. Example
output from included
Python script
Wiring information
Wiring up the device requires 3 jumpers, to connect VCC (3.3v), GND, and AOUT. The example here uses ADC0, which is
GP26. Power is supplied from the 3.3V pin.
Raspberry Pi Pico-series C/C++ SDK
Attaching a microphone using the ADC 532

WARNING
Most boards will take a range of VCC voltages from the Pico’s default 3.3V to the 5 volts commonly seen on other
microcontrollers. Ensure your board doesn’t output an analogue signal greater than 3.3V as this may result in
permanent damage to the Pico’s ADC.
Figure 14. Wiring
Diagram for ICS-40180
microphone breakout
board.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/adc/microphone_adc/CMakeLists.txt
Ê1 add_executable(microphone_adc
Ê2 microphone_adc.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and adc hardware support
Ê6 target_link_libraries(microphone_adc pico_stdlib hardware_adc)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(microphone_adc)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(microphone_adc)
microphone_adc.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/adc/microphone_adc/microphone_adc.c
Ê1 /**
Ê2 * Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Raspberry Pi Pico-series C/C++ SDK
Attaching a microphone using the ADC 533

Ê7 #include <stdio.h>
Ê8 #include "pico/stdlib.h"
Ê9 #include "hardware/gpio.h"
10 #include "hardware/adc.h"
11 #include "hardware/uart.h"
12 #include "pico/binary_info.h"
13
14 /* Example code to extract analog values from a microphone using the ADC
15 with accompanying Python file to plot these values
16
17 Connections on Raspberry Pi Pico board, other boards may vary.
18
19 GPIO 26/ADC0 (pin 31)-> AOUT or AUD on microphone board
20 3.3v (pin 36) -> VCC on microphone board
21 GND (pin 38) -> GND on microphone board
22 */
23
24 #define ADC_NUM 0
25 #define ADC_PIN (26 + ADC_NUM)
26 #define ADC_VREF 3.3
27 #define ADC_RANGE (1 << 12)
28 #define ADC_CONVERT (ADC_VREF / (ADC_RANGE - 1))
29
30 int main() {
31 stdio_init_all();
32 printf("Beep boop, listening...\n");
33
34 bi_decl(bi_program_description("Analog microphone example for Raspberry Pi Pico")); //
Ê for picotool
35 bi_decl(bi_1pin_with_name(ADC_PIN, "ADC input pin"));
36
37 adc_init();
38 adc_gpio_init( ADC_PIN);
39 adc_select_input( ADC_NUM);
40
41 uint adc_raw;
42 while (1) {
43 adc_raw = adc_read(); // raw voltage from ADC
44 printf("%.2f\n", adc_raw * ADC_CONVERT);
45 sleep_ms(10);
46 }
47 }
Bill of Materials
Table 39. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
ICS-40180 microphone breakout
board or similar
1 From SparkFun
M/M Jumper wires 3 generic part
Raspberry Pi Pico-series C/C++ SDK
Attaching a microphone using the ADC 534

Attaching a BME280 temperature/humidity/pressure
sensor via SPI
This example code shows how to interface the Raspberry Pi Pico to a BME280 temperature/humidity/pressure. The
particular device used can be interfaced via I2C or SPI, we are using SPI, and interfacing at 3.3v.
This examples reads the data from the sensor, and runs it through the appropriate compensation routines (see the chip
datasheet for details https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bme280-
ds002.pdf). At startup the compensation parameters required by the compensation routines are read from the chip. )
Wiring information
Wiring up the device requires 6 jumpers as follows:
•
GPIO 16 (pin 21) MISO/spi0_rx→ SDO/SDO on bme280 board
•
GPIO 17 (pin 22) Chip select → CSB/!CS on bme280 board
•
GPIO 18 (pin 24) SCK/spi0_sclk → SCL/SCK on bme280 board
•
GPIO 19 (pin 25) MOSI/spi0_tx → SDA/SDI on bme280 board
•
3.3v (pin 3;6) → VCC on bme280 board
•
GND (pin 38) → GND on bme280 board
The example here uses SPI port 0. Power is supplied from the 3.3V pin.
NOTE
There are many different manufacturers who sell boards with the BME280. Whilst they all appear slightly different,
they all have, at least, the same 6 pins required to power and communicate. When wiring up a board that is different
to the one in the diagram, ensure you connect up as described in the previous paragraph.
Figure 15. Wiring
Diagram for bme280.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/bme280_spi/CMakeLists.txt
Ê1 add_executable(bme280_spi
Ê2 bme280_spi.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional spi hardware support
Ê6 target_link_libraries(bme280_spi pico_stdlib hardware_spi)
Raspberry Pi Pico-series C/C++ SDK
Attaching a BME280 temperature/humidity/pressure sensor via SPI 535

Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(bme280_spi)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(bme280_spi)
bme280_spi.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/bme280_spi/bme280_spi.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/spi.h"
Ê12
Ê13 /* Example code to talk to a bme280 humidity/temperature/pressure sensor.
Ê14
Ê15 NOTE: Ensure the device is capable of being driven at 3.3v NOT 5v. The Pico
Ê16 GPIO (and therefore SPI) cannot be used at 5v.
Ê17
Ê18 You will need to use a level shifter on the SPI lines if you want to run the
Ê19 board at 5v.
Ê20
Ê21 Connections on Raspberry Pi Pico board and a generic bme280 board, other
Ê22 boards may vary.
Ê23
Ê24 GPIO 16 (pin 21) MISO/spi0_rx-> SDO/SDO on bme280 board
Ê25 GPIO 17 (pin 22) Chip select -> CSB/!CS on bme280 board
Ê26 GPIO 18 (pin 24) SCK/spi0_sclk -> SCL/SCK on bme280 board
Ê27 GPIO 19 (pin 25) MOSI/spi0_tx -> SDA/SDI on bme280 board
Ê28 3.3v (pin 36) -> VCC on bme280 board
Ê29 GND (pin 38) -> GND on bme280 board
Ê30
Ê31 Note: SPI devices can have a number of different naming schemes for pins. See
Ê32 the Wikipedia page at https://en.wikipedia.org/wiki/Serial_Peripheral_Interface
Ê33 for variations.
Ê34
Ê35 This code uses a bunch of register definitions, and some compensation code derived
Ê36 from the Bosch datasheet which can be found here.
Ê37 https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bme280-
Ê ds002.pdf
Ê38 */
Ê39
Ê40 #define READ_BIT 0x80
Ê41
Ê42 int32_t t_fine;
Ê43
Ê44 uint16_t dig_T1;
Ê45 int16_t dig_T2, dig_T3;
Ê46 uint16_t dig_P1;
Ê47 int16_t dig_P2, dig_P3, dig_P4, dig_P5, dig_P6, dig_P7, dig_P8, dig_P9;
Ê48 uint8_t dig_H1, dig_H3;
Ê49 int8_t dig_H6;
Raspberry Pi Pico-series C/C++ SDK
Attaching a BME280 temperature/humidity/pressure sensor via SPI 536

Ê50 int16_t dig_H2, dig_H4, dig_H5;
Ê51
Ê52 /* The following compensation functions are required to convert from the raw ADC
Ê53 data from the chip to something usable. Each chip has a different set of
Ê54 compensation parameters stored on the chip at point of manufacture, which are
Ê55 read from the chip at startup and used in these routines.
Ê56 */
Ê57 int32_t compensate_temp(int32_t adc_T) {
Ê58 int32_t var1, var2, T;
Ê59 var1 = ((((adc_T >> 3) - ((int32_t) dig_T1 << 1))) * ((int32_t) dig_T2)) >> 11;
Ê60 var2 = (((((adc_T >> 4) - ((int32_t) dig_T1)) * ((adc_T >> 4) - ((int32_t) dig_T1))) >>
Ê 12) * ((int32_t) dig_T3))
Ê61 >> 14;
Ê62
Ê63 t_fine = var1 + var2;
Ê64 T = (t_fine * 5 + 128) >> 8;
Ê65 return T;
Ê66 }
Ê67
Ê68 uint32_t compensate_pressure(int32_t adc_P) {
Ê69 int32_t var1, var2;
Ê70 uint32_t p;
Ê71 var1 = (((int32_t) t_fine) >> 1) - (int32_t) 64000;
Ê72 var2 = (((var1 >> 2) * (var1 >> 2)) >> 11) * ((int32_t) dig_P6);
Ê73 var2 = var2 + ((var1 * ((int32_t) dig_P5)) << 1);
Ê74 var2 = (var2 >> 2) + (((int32_t) dig_P4) << 16);
Ê75 var1 = (((dig_P3 * (((var1 >> 2) * (var1 >> 2)) >> 13)) >> 3) + ((((int32_t) dig_P2) *
Ê var1) >> 1)) >> 18;
Ê76 var1 = ((((32768 + var1)) * ((int32_t) dig_P1)) >> 15);
Ê77 if (var1 == 0)
Ê78 return 0;
Ê79
Ê80 p = (((uint32_t) (((int32_t) 1048576) - adc_P) - (var2 >> 12))) * 3125;
Ê81 if (p < 0x80000000)
Ê82 p = (p << 1) / ((uint32_t) var1);
Ê83 else
Ê84 p = (p / (uint32_t) var1) * 2;
Ê85
Ê86 var1 = (((int32_t) dig_P9) * ((int32_t) (((p >> 3) * (p >> 3)) >> 13))) >> 12;
Ê87 var2 = (((int32_t) (p >> 2)) * ((int32_t) dig_P8)) >> 13;
Ê88 p = (uint32_t) ((int32_t) p + ((var1 + var2 + dig_P7) >> 4));
Ê89
Ê90 return p;
Ê91 }
Ê92
Ê93 uint32_t compensate_humidity(int32_t adc_H) {
Ê94 int32_t v_x1_u32r;
Ê95 v_x1_u32r = (t_fine - ((int32_t) 76800));
Ê96 v_x1_u32r = (((((adc_H << 14) - (((int32_t) dig_H4) << 20) - (((int32_t) dig_H5) *
Ê v_x1_u32r)) +
Ê97 ((int32_t) 16384)) >> 15) * (((((((v_x1_u32r * ((int32_t) dig_H6)) >> 10)
Ê * (((v_x1_u32r *
Ê98
Ê ((int32_t) dig_H3))
Ê99 >> 11) + ((int32_t) 32768))) >> 10) + ((int32_t) 2097152)) *
100 ((int32_t) dig_H2) + 8192) >> 14));
101 v_x1_u32r = (v_x1_u32r - (((((v_x1_u32r >> 15) * (v_x1_u32r >> 15)) >> 7) * ((int32_t)
Ê dig_H1)) >> 4));
102 v_x1_u32r = (v_x1_u32r < 0 ? 0 : v_x1_u32r);
103 v_x1_u32r = (v_x1_u32r > 419430400 ? 419430400 : v_x1_u32r);
104
105 return (uint32_t) (v_x1_u32r >> 12);
106 }
107
Raspberry Pi Pico-series C/C++ SDK
Attaching a BME280 temperature/humidity/pressure sensor via SPI 537

108 #ifdef PICO_DEFAULT_SPI_CSN_PIN
109 static inline void cs_select() {
110 asm volatile("nop \n nop \n nop");
111 gpio_put(PICO_DEFAULT_SPI_CSN_PIN, 0); // Active low
112 asm volatile("nop \n nop \n nop");
113 }
114
115 static inline void cs_deselect() {
116 asm volatile("nop \n nop \n nop");
117 gpio_put(PICO_DEFAULT_SPI_CSN_PIN, 1);
118 asm volatile("nop \n nop \n nop");
119 }
120 #endif
121
122 #if defined(spi_default) && defined(PICO_DEFAULT_SPI_CSN_PIN)
123 static void write_register(uint8_t reg, uint8_t data) {
124 uint8_t buf[2];
125 buf[0] = reg & 0x7f; // remove read bit as this is a write
126 buf[1] = data;
127 cs_select();
128 spi_write_blocking(spi_default, buf, 2);
129 cs_deselect();
130 sleep_ms(10);
131 }
132
133 static void read_registers(uint8_t reg, uint8_t *buf, uint16_t len) {
134 // For this particular device, we send the device the register we want to read
135 // first, then subsequently read from the device. The register is auto incrementing
136 // so we don't need to keep sending the register we want, just the first.
137 reg |= READ_BIT;
138 cs_select();
139 spi_write_blocking(spi_default, ®, 1);
140 sleep_ms(10);
141 spi_read_blocking(spi_default, 0, buf, len);
142 cs_deselect();
143 sleep_ms(10);
144 }
145
146 /* This function reads the manufacturing assigned compensation parameters from the device */
147 void read_compensation_parameters() {
148 uint8_t buffer[26];
149
150 read_registers(0x88, buffer, 26);
151
152 dig_T1 = buffer[0] | (buffer[1] << 8);
153 dig_T2 = buffer[2] | (buffer[3] << 8);
154 dig_T3 = buffer[4] | (buffer[5] << 8);
155
156 dig_P1 = buffer[6] | (buffer[7] << 8);
157 dig_P2 = buffer[8] | (buffer[9] << 8);
158 dig_P3 = buffer[10] | (buffer[11] << 8);
159 dig_P4 = buffer[12] | (buffer[13] << 8);
160 dig_P5 = buffer[14] | (buffer[15] << 8);
161 dig_P6 = buffer[16] | (buffer[17] << 8);
162 dig_P7 = buffer[18] | (buffer[19] << 8);
163 dig_P8 = buffer[20] | (buffer[21] << 8);
164 dig_P9 = buffer[22] | (buffer[23] << 8);
165
166 dig_H1 = buffer[25]; // 0xA1
167
168 read_registers(0xE1, buffer, 8);
169
170 dig_H2 = buffer[0] | (buffer[1] << 8); // 0xE1 | 0xE2
171 dig_H3 = (int8_t) buffer[2]; // 0xE3
Raspberry Pi Pico-series C/C++ SDK
Attaching a BME280 temperature/humidity/pressure sensor via SPI 538

172 dig_H4 = buffer[3] << 4 | (buffer[4] & 0xf); // 0xE4 | 0xE5[3:0]
173 dig_H5 = (buffer[4] >> 4) | (buffer[5] << 4); // 0xE5[7:4] | 0xE6
174 dig_H6 = (int8_t) buffer[6]; // 0xE7
175 }
176
177 static void bme280_read_raw(int32_t *humidity, int32_t *pressure, int32_t *temperature) {
178 uint8_t buffer[8];
179
180 read_registers(0xF7, buffer, 8);
181 *pressure = ((uint32_t) buffer[0] << 12) | ((uint32_t) buffer[1] << 4) | (buffer[2] >>
Ê 4);
182 *temperature = ((uint32_t) buffer[3] << 12) | ((uint32_t) buffer[4] << 4) | (buffer[5]
Ê >> 4);
183 *humidity = (uint32_t) buffer[6] << 8 | buffer[7];
184 }
185 #endif
186
187 int main() {
188 stdio_init_all();
189 #if !defined(spi_default) || !defined(PICO_DEFAULT_SPI_SCK_PIN) ||
Ê !defined(PICO_DEFAULT_SPI_TX_PIN) || !defined(PICO_DEFAULT_SPI_RX_PIN) ||
Ê !defined(PICO_DEFAULT_SPI_CSN_PIN)
190 #warning spi/bme280_spi example requires a board with SPI pins
191 puts("Default SPI pins were not defined");
192 #else
193
194 printf("Hello, bme280! Reading raw data from registers via SPI...\n");
195
196 // This example will use SPI0 at 0.5MHz.
197 spi_init(spi_default, 500 * 1000);
198 gpio_set_function(PICO_DEFAULT_SPI_RX_PIN, GPIO_FUNC_SPI);
199 gpio_set_function(PICO_DEFAULT_SPI_SCK_PIN, GPIO_FUNC_SPI);
200 gpio_set_function(PICO_DEFAULT_SPI_TX_PIN, GPIO_FUNC_SPI);
201 // Make the SPI pins available to picotool
202 bi_decl(bi_3pins_with_func(PICO_DEFAULT_SPI_RX_PIN, PICO_DEFAULT_SPI_TX_PIN,
Ê PICO_DEFAULT_SPI_SCK_PIN, GPIO_FUNC_SPI));
203
204 // Chip select is active-low, so we'll initialise it to a driven-high state
205 gpio_init(PICO_DEFAULT_SPI_CSN_PIN);
206 gpio_set_dir(PICO_DEFAULT_SPI_CSN_PIN, GPIO_OUT);
207 gpio_put(PICO_DEFAULT_SPI_CSN_PIN, 1);
208 // Make the CS pin available to picotool
209 bi_decl(bi_1pin_with_name(PICO_DEFAULT_SPI_CSN_PIN, "SPI CS"));
210
211 // See if SPI is working - interrograte the device for its I2C ID number, should be 0x60
212 uint8_t id;
213 read_registers(0xD0, &id, 1);
214 printf("Chip ID is 0x%x\n", id);
215
216 read_compensation_parameters();
217
218 write_register(0xF2, 0x1); // Humidity oversampling register - going for x1
219 write_register(0xF4, 0x27);// Set rest of oversampling modes and run mode to normal
220
221 int32_t humidity, pressure, temperature;
222
223 while (1) {
224 bme280_read_raw(&humidity, &pressure, &temperature);
225
226 // These are the raw numbers from the chip, so we need to run through the
227 // compensations to get human understandable numbers
228 temperature = compensate_temp(temperature);
229 pressure = compensate_pressure(pressure);
230 humidity = compensate_humidity(humidity);
Raspberry Pi Pico-series C/C++ SDK
Attaching a BME280 temperature/humidity/pressure sensor via SPI 539

231
232 printf("Humidity = %.2f%%\n", humidity / 1024.0);
233 printf("Pressure = %dPa\n", pressure);
234 printf("Temp. = %.2fC\n", temperature / 100.0);
235
236 sleep_ms(1000);
237 }
238 #endif
239 }
Bill of Materials
Table 40. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
BME280 board 1 generic part
M/M Jumper wires 6 generic part
Attaching a MPU9250 accelerometer/gyroscope via SPI
This example code shows how to interface the Raspberry Pi Pico to the MPU9250 accelerometer/gyroscope board. The
particular device used can be interfaced via I2C or SPI, we are using SPI, and interfacing at 3.3v.
NOTE
This is a very basic example, and only recovers raw data from the sensor. There are various calibration options
available that should be used to ensure that the final results are accurate. It is also possible to wire up the interrupt
pin to a GPIO and read data only when it is ready, rather than using the polling approach in the example.
Wiring information
Wiring up the device requires 6 jumpers as follows:
•
GPIO 4 (pin 6) MISO/spi0_rx→ ADO on MPU9250 board
•
GPIO 5 (pin 7) Chip select → NCS on MPU9250 board
•
GPIO 6 (pin 9) SCK/spi0_sclk → SCL on MPU9250 board
•
GPIO 7 (pin 10) MOSI/spi0_tx → SDA on MPU9250 board
•
3.3v (pin 36) → VCC on MPU9250 board
•
GND (pin 38) → GND on MPU9250 board
The example here uses SPI port 0. Power is supplied from the 3.3V pin.
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU9250 accelerometer/gyroscope via SPI 540

NOTE
There are many different manufacturers who sell boards with the MPU9250. Whilst they all appear slightly different,
they all have, at least, the same 6 pins required to power and communicate. When wiring up a board that is different
to the one in the diagram, ensure you connect up as described in the previous paragraph.
Figure 16. Wiring
Diagram for MPU9250.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/mpu9250_spi/CMakeLists.txt
Ê1 add_executable(mpu9250_spi
Ê2 mpu9250_spi.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional spi hardware support
Ê6 target_link_libraries(mpu9250_spi pico_stdlib hardware_spi)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(mpu9250_spi)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(mpu9250_spi)
mpu9250_spi.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/mpu9250_spi/mpu9250_spi.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/spi.h"
Ê12
Ê13 /* Example code to talk to a MPU9250 MEMS accelerometer and gyroscope.
Ê14 Ignores the magnetometer, that is left as a exercise for the reader.
Ê15
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU9250 accelerometer/gyroscope via SPI 541

Ê16 This is taking to simple approach of simply reading registers. It's perfectly
Ê17 possible to link up an interrupt line and set things up to read from the
Ê18 inbuilt FIFO to make it more useful.
Ê19
Ê20 NOTE: Ensure the device is capable of being driven at 3.3v NOT 5v. The Pico
Ê21 GPIO (and therefore SPI) cannot be used at 5v.
Ê22
Ê23 You will need to use a level shifter on the I2C lines if you want to run the
Ê24 board at 5v.
Ê25
Ê26 Connections on Raspberry Pi Pico board and a generic MPU9250 board, other
Ê27 boards may vary.
Ê28
Ê29 GPIO 4 (pin 6) MISO/spi0_rx-> ADO on MPU9250 board
Ê30 GPIO 5 (pin 7) Chip select -> NCS on MPU9250 board
Ê31 GPIO 6 (pin 9) SCK/spi0_sclk -> SCL on MPU9250 board
Ê32 GPIO 7 (pin 10) MOSI/spi0_tx -> SDA on MPU9250 board
Ê33 3.3v (pin 36) -> VCC on MPU9250 board
Ê34 GND (pin 38) -> GND on MPU9250 board
Ê35
Ê36 Note: SPI devices can have a number of different naming schemes for pins. See
Ê37 the Wikipedia page at https://en.wikipedia.org/wiki/Serial_Peripheral_Interface
Ê38 for variations.
Ê39 The particular device used here uses the same pins for I2C and SPI, hence the
Ê40 using of I2C names
Ê41 */
Ê42
Ê43 #define PIN_MISO 4
Ê44 #define PIN_CS 5
Ê45 #define PIN_SCK 6
Ê46 #define PIN_MOSI 7
Ê47
Ê48 #define SPI_PORT spi0
Ê49 #define READ_BIT 0x80
Ê50
Ê51 static inline void cs_select() {
Ê52 asm volatile("nop \n nop \n nop");
Ê53 gpio_put(PIN_CS, 0); // Active low
Ê54 asm volatile("nop \n nop \n nop");
Ê55 }
Ê56
Ê57 static inline void cs_deselect() {
Ê58 asm volatile("nop \n nop \n nop");
Ê59 gpio_put(PIN_CS, 1);
Ê60 asm volatile("nop \n nop \n nop");
Ê61 }
Ê62
Ê63 static void mpu9250_reset() {
Ê64 // Two byte reset. First byte register, second byte data
Ê65 // There are a load more options to set up the device in different ways that could be
Ê added here
Ê66 uint8_t buf[] = {0x6B, 0x00};
Ê67 cs_select();
Ê68 spi_write_blocking(SPI_PORT, buf, 2);
Ê69 cs_deselect();
Ê70 }
Ê71
Ê72
Ê73 static void read_registers(uint8_t reg, uint8_t *buf, uint16_t len) {
Ê74 // For this particular device, we send the device the register we want to read
Ê75 // first, then subsequently read from the device. The register is auto incrementing
Ê76 // so we don't need to keep sending the register we want, just the first.
Ê77
Ê78 reg |= READ_BIT;
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU9250 accelerometer/gyroscope via SPI 542

Ê79 cs_select();
Ê80 spi_write_blocking(SPI_PORT, ®, 1);
Ê81 sleep_ms(10);
Ê82 spi_read_blocking(SPI_PORT, 0, buf, len);
Ê83 cs_deselect();
Ê84 sleep_ms(10);
Ê85 }
Ê86
Ê87
Ê88 static void mpu9250_read_raw(int16_t accel[3], int16_t gyro[3], int16_t *temp) {
Ê89 uint8_t buffer[6];
Ê90
Ê91 // Start reading acceleration registers from register 0x3B for 6 bytes
Ê92 read_registers(0x3B, buffer, 6);
Ê93
Ê94 for (int i = 0; i < 3; i++) {
Ê95 accel[i] = (buffer[i * 2] << 8 | buffer[(i * 2) + 1]);
Ê96 }
Ê97
Ê98 // Now gyro data from reg 0x43 for 6 bytes
Ê99 read_registers(0x43, buffer, 6);
100
101 for (int i = 0; i < 3; i++) {
102 gyro[i] = (buffer[i * 2] << 8 | buffer[(i * 2) + 1]);;
103 }
104
105 // Now temperature from reg 0x41 for 2 bytes
106 read_registers(0x41, buffer, 2);
107
108 *temp = buffer[0] << 8 | buffer[1];
109 }
110
111 int main() {
112 stdio_init_all();
113
114 printf("Hello, MPU9250! Reading raw data from registers via SPI...\n");
115
116 // This example will use SPI0 at 0.5MHz.
117 spi_init(SPI_PORT, 500 * 1000);
118 gpio_set_function(PIN_MISO, GPIO_FUNC_SPI);
119 gpio_set_function(PIN_SCK, GPIO_FUNC_SPI);
120 gpio_set_function(PIN_MOSI, GPIO_FUNC_SPI);
121 // Make the SPI pins available to picotool
122 bi_decl(bi_3pins_with_func(PIN_MISO, PIN_MOSI, PIN_SCK, GPIO_FUNC_SPI));
123
124 // Chip select is active-low, so we'll initialise it to a driven-high state
125 gpio_init(PIN_CS);
126 gpio_set_dir(PIN_CS, GPIO_OUT);
127 gpio_put(PIN_CS, 1);
128 // Make the CS pin available to picotool
129 bi_decl(bi_1pin_with_name(PIN_CS, "SPI CS"));
130
131 mpu9250_reset();
132
133 // See if SPI is working - interrograte the device for its I2C ID number, should be 0x71
134 uint8_t id;
135 read_registers(0x75, &id, 1);
136 printf("I2C address is 0x%x\n", id);
137
138 int16_t acceleration[3], gyro[3], temp;
139
140 while (1) {
141 mpu9250_read_raw(acceleration, gyro, &temp);
142
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU9250 accelerometer/gyroscope via SPI 543

143 // These are the raw numbers from the chip, so will need tweaking to be really useful.
144 // See the datasheet for more information
145 printf("Acc. X = %d, Y = %d, Z = %d\n", acceleration[0], acceleration[1],
Ê acceleration[2]);
146 printf("Gyro. X = %d, Y = %d, Z = %d\n", gyro[0], gyro[1], gyro[2]);
147 // Temperature is simple so use the datasheet calculation to get deg C.
148 // Note this is chip temperature.
149 printf("Temp. = %f\n", (temp / 340.0) + 36.53);
150
151 sleep_ms(100);
152 }
153 }
Bill of Materials
Table 41. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
MPU9250 board 1 generic part
M/M Jumper wires 6 generic part
Attaching a MPU6050 accelerometer/gyroscope via I2C
This example code shows how to interface the Raspberry Pi Pico to the MPU6050 accelerometer/gyroscope board. This
device uses I2C for communications, and most MPU6050 parts are happy running at either 3.3 or 5v. The Raspberry Pi
RP2040 GPIO’s work at 3.3v so that is what the example uses.
NOTE
This is a very basic example, and only recovers raw data from the sensor. There are various calibration options
available that should be used to ensure that the final results are accurate. It is also possible to wire up the interrupt
pin to a GPIO and read data only when it is ready, rather than using the polling approach in the example.
Wiring information
Wiring up the device requires 4 jumpers, to connect VCC (3.3v), GND, SDA and SCL. The example here uses I2C port 0,
which is assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 3.3V pin.
NOTE
There are many different manufacturers who sell boards with the MPU6050. Whilst they all appear slightly different,
they all have, at least, the same 4 pins required to power and communicate. When wiring up a board that is different
to the one in the diagram, ensure you connect up as described in the previous paragraph.
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU6050 accelerometer/gyroscope via I2C 544

Figure 17. Wiring
Diagram for MPU6050.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mpu6050_i2c/CMakeLists.txt
Ê1 add_executable(mpu6050_i2c
Ê2 mpu6050_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(mpu6050_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(mpu6050_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(mpu6050_i2c)
mpu6050_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mpu6050_i2c/mpu6050_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to a MPU6050 MEMS accelerometer and gyroscope
Ê14
Ê15 This is taking to simple approach of simply reading registers. It's perfectly
Ê16 possible to link up an interrupt line and set things up to read from the
Ê17 inbuilt FIFO to make it more useful.
Ê18
Ê19 NOTE: Ensure the device is capable of being driven at 3.3v NOT 5v. The Pico
Ê20 GPIO (and therefore I2C) cannot be used at 5v.
Ê21
Ê22 You will need to use a level shifter on the I2C lines if you want to run the
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU6050 accelerometer/gyroscope via I2C 545

Ê23 board at 5v.
Ê24
Ê25 Connections on Raspberry Pi Pico board, other boards may vary.
Ê26
Ê27 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is GP4 (pin 6)) -> SDA on MPU6050 board
Ê28 GPIO PICO_DEFAULT_I2C_SCL_PIN (On Pico this is GP5 (pin 7)) -> SCL on MPU6050 board
Ê29 3.3v (pin 36) -> VCC on MPU6050 board
Ê30 GND (pin 38) -> GND on MPU6050 board
Ê31 */
Ê32
Ê33 // By default these devices are on bus address 0x68
Ê34 static int addr = 0x68;
Ê35
Ê36 #ifdef i2c_default
Ê37 static void mpu6050_reset() {
Ê38 // Two byte reset. First byte register, second byte data
Ê39 // There are a load more options to set up the device in different ways that could be
Ê added here
Ê40 uint8_t buf[] = {0x6B, 0x80};
Ê41 i2c_write_blocking(i2c_default, addr, buf, 2, false);
Ê42 }
Ê43
Ê44 static void mpu6050_read_raw(int16_t accel[3], int16_t gyro[3], int16_t *temp) {
Ê45 // For this particular device, we send the device the register we want to read
Ê46 // first, then subsequently read from the device. The register is auto incrementing
Ê47 // so we don't need to keep sending the register we want, just the first.
Ê48
Ê49 uint8_t buffer[6];
Ê50
Ê51 // Start reading acceleration registers from register 0x3B for 6 bytes
Ê52 uint8_t val = 0x3B;
Ê53 i2c_write_blocking(i2c_default, addr, &val, 1, true); // true to keep master control of
Ê bus
Ê54 i2c_read_blocking(i2c_default, addr, buffer, 6, false);
Ê55
Ê56 for (int i = 0; i < 3; i++) {
Ê57 accel[i] = (buffer[i * 2] << 8 | buffer[(i * 2) + 1]);
Ê58 }
Ê59
Ê60 // Now gyro data from reg 0x43 for 6 bytes
Ê61 // The register is auto incrementing on each read
Ê62 val = 0x43;
Ê63 i2c_write_blocking(i2c_default, addr, &val, 1, true);
Ê64 i2c_read_blocking(i2c_default, addr, buffer, 6, false); // False - finished with bus
Ê65
Ê66 for (int i = 0; i < 3; i++) {
Ê67 gyro[i] = (buffer[i * 2] << 8 | buffer[(i * 2) + 1]);;
Ê68 }
Ê69
Ê70 // Now temperature from reg 0x41 for 2 bytes
Ê71 // The register is auto incrementing on each read
Ê72 val = 0x41;
Ê73 i2c_write_blocking(i2c_default, addr, &val, 1, true);
Ê74 i2c_read_blocking(i2c_default, addr, buffer, 2, false); // False - finished with bus
Ê75
Ê76 *temp = buffer[0] << 8 | buffer[1];
Ê77 }
Ê78 #endif
Ê79
Ê80 int main() {
Ê81 stdio_init_all();
Ê82 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
Ê83 #warning i2c/mpu6050_i2c example requires a board with I2C pins
Raspberry Pi Pico-series C/C++ SDK
Attaching a MPU6050 accelerometer/gyroscope via I2C 546
Ê84 puts("Default I2C pins were not defined");
Ê85 return 0;
Ê86 #else
Ê87 printf("Hello, MPU6050! Reading raw data from registers...\n");
Ê88
Ê89 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
Ê90 i2c_init(i2c_default, 400 * 1000);
Ê91 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
Ê92 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
Ê93 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
Ê94 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
Ê95 // Make the I2C pins available to picotool
Ê96 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
Ê97
Ê98 mpu6050_reset();
Ê99
100 int16_t acceleration[3], gyro[3], temp;
101
102 while (1) {
103 mpu6050_read_raw(acceleration, gyro, &temp);
104
105 // These are the raw numbers from the chip, so will need tweaking to be really useful.
106 // See the datasheet for more information
107 printf("Acc. X = %d, Y = %d, Z = %d\n", acceleration[0], acceleration[1],
Ê acceleration[2]);
108 printf("Gyro. X = %d, Y = %d, Z = %d\n", gyro[0], gyro[1], gyro[2]);
109 // Temperature is simple so use the datasheet calculation to get deg C.
110 // Note this is chip temperature.
111 printf("Temp. = %f\n", (temp / 340.0) + 36.53);
112
113 sleep_ms(100);
114 }
115 #endif
116 }
Bill of Materials
Table 42. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
MPU6050 board 1 generic part
M/M Jumper wires 4 generic part
Attaching a 16x2 LCD via I2C
This example code shows how to interface the Raspberry Pi Pico to one of the very common 16x2 LCD character
displays. The display will need a 3.3V I2C adapter board as this example uses I2C for communications.
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via I2C 547

NOTE
These LCD displays can also be driven directly using GPIO without the use of an adapter board. That is beyond the
scope of this example.
Wiring information
Wiring up the device requires 4 jumpers, to connect VCC (3.3v), GND, SDA and SCL. The example here uses I2C port 0,
which is assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 3.3V pin.
WARNING
Many displays of this type are 5v. If you wish to use a 5v display you will need to use level shifters on the SDA and
SCL lines to convert from the 3.3V used by the RP2040. Whilst a 5v display will just about work at 3.3v, the display
will be dim.
Figure 18. Wiring
Diagram for
LCD1602A LCD with
I2C bridge.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/lcd_1602_i2c/CMakeLists.txt
Ê1 add_executable(lcd_1602_i2c
Ê2 lcd_1602_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(lcd_1602_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(lcd_1602_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(lcd_1602_i2c)
lcd_1602_i2c.c
The example code.
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via I2C 548

Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/lcd_1602_i2c/lcd_1602_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "hardware/i2c.h"
Ê11 #include "pico/binary_info.h"
Ê12
Ê13 /* Example code to drive a 16x2 LCD panel via a I2C bridge chip (e.g. PCF8574)
Ê14
Ê15 NOTE: The panel must be capable of being driven at 3.3v NOT 5v. The Pico
Ê16 GPIO (and therefore I2C) cannot be used at 5v.
Ê17
Ê18 You will need to use a level shifter on the I2C lines if you want to run the
Ê19 board at 5v.
Ê20
Ê21 Connections on Raspberry Pi Pico board, other boards may vary.
Ê22
Ê23 GPIO 4 (pin 6)-> SDA on LCD bridge board
Ê24 GPIO 5 (pin 7)-> SCL on LCD bridge board
Ê25 3.3v (pin 36) -> VCC on LCD bridge board
Ê26 GND (pin 38) -> GND on LCD bridge board
Ê27 */
Ê28 // commands
Ê29 const int LCD_CLEARDISPLAY = 0x01;
Ê30 const int LCD_RETURNHOME = 0x02;
Ê31 const int LCD_ENTRYMODESET = 0x04;
Ê32 const int LCD_DISPLAYCONTROL = 0x08;
Ê33 const int LCD_CURSORSHIFT = 0x10;
Ê34 const int LCD_FUNCTIONSET = 0x20;
Ê35 const int LCD_SETCGRAMADDR = 0x40;
Ê36 const int LCD_SETDDRAMADDR = 0x80;
Ê37
Ê38 // flags for display entry mode
Ê39 const int LCD_ENTRYSHIFTINCREMENT = 0x01;
Ê40 const int LCD_ENTRYLEFT = 0x02;
Ê41
Ê42 // flags for display and cursor control
Ê43 const int LCD_BLINKON = 0x01;
Ê44 const int LCD_CURSORON = 0x02;
Ê45 const int LCD_DISPLAYON = 0x04;
Ê46
Ê47 // flags for display and cursor shift
Ê48 const int LCD_MOVERIGHT = 0x04;
Ê49 const int LCD_DISPLAYMOVE = 0x08;
Ê50
Ê51 // flags for function set
Ê52 const int LCD_5x10DOTS = 0x04;
Ê53 const int LCD_2LINE = 0x08;
Ê54 const int LCD_8BITMODE = 0x10;
Ê55
Ê56 // flag for backlight control
Ê57 const int LCD_BACKLIGHT = 0x08;
Ê58
Ê59 const int LCD_ENABLE_BIT = 0x04;
Ê60
Ê61 // By default these LCD display drivers are on bus address 0x27
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via I2C 549

Ê62 static int addr = 0x27;
Ê63
Ê64 // Modes for lcd_send_byte
Ê65 #define LCD_CHARACTER 1
Ê66 #define LCD_COMMAND 0
Ê67
Ê68 #define MAX_LINES 2
Ê69 #define MAX_CHARS 16
Ê70
Ê71 /* Quick helper function for single byte transfers */
Ê72 void i2c_write_byte(uint8_t val) {
Ê73 #ifdef i2c_default
Ê74 i2c_write_blocking(i2c_default, addr, &val, 1, false);
Ê75 #endif
Ê76 }
Ê77
Ê78 void lcd_toggle_enable(uint8_t val) {
Ê79 // Toggle enable pin on LCD display
Ê80 // We cannot do this too quickly or things don't work
Ê81 #define DELAY_US 600
Ê82 sleep_us(DELAY_US);
Ê83 i2c_write_byte(val | LCD_ENABLE_BIT);
Ê84 sleep_us(DELAY_US);
Ê85 i2c_write_byte(val & ~LCD_ENABLE_BIT);
Ê86 sleep_us(DELAY_US);
Ê87 }
Ê88
Ê89 // The display is sent a byte as two separate nibble transfers
Ê90 void lcd_send_byte(uint8_t val, int mode) {
Ê91 uint8_t high = mode | (val & 0xF0) | LCD_BACKLIGHT;
Ê92 uint8_t low = mode | ((val << 4) & 0xF0) | LCD_BACKLIGHT;
Ê93
Ê94 i2c_write_byte(high);
Ê95 lcd_toggle_enable(high);
Ê96 i2c_write_byte(low);
Ê97 lcd_toggle_enable(low);
Ê98 }
Ê99
100 void lcd_clear(void) {
101 lcd_send_byte(LCD_CLEARDISPLAY, LCD_COMMAND);
102 }
103
104 // go to location on LCD
105 void lcd_set_cursor(int line, int position) {
106 int val = (line == 0) ? 0x80 + position : 0xC0 + position;
107 lcd_send_byte(val, LCD_COMMAND);
108 }
109
110 static inline void lcd_char(char val) {
111 lcd_send_byte(val, LCD_CHARACTER);
112 }
113
114 void lcd_string(const char *s) {
115 while (*s) {
116 lcd_char(*s++);
117 }
118 }
119
120 void lcd_init() {
121 lcd_send_byte(0x03, LCD_COMMAND);
122 lcd_send_byte(0x03, LCD_COMMAND);
123 lcd_send_byte(0x03, LCD_COMMAND);
124 lcd_send_byte(0x02, LCD_COMMAND);
125
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via I2C 550

126 lcd_send_byte(LCD_ENTRYMODESET | LCD_ENTRYLEFT, LCD_COMMAND);
127 lcd_send_byte(LCD_FUNCTIONSET | LCD_2LINE, LCD_COMMAND);
128 lcd_send_byte(LCD_DISPLAYCONTROL | LCD_DISPLAYON, LCD_COMMAND);
129 lcd_clear();
130 }
131
132 int main() {
133 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
134 #warning i2c/lcd_1602_i2c example requires a board with I2C pins
135 #else
136 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
137 i2c_init(i2c_default, 100 * 1000);
138 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
139 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
140 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
141 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
142 // Make the I2C pins available to picotool
143 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
144
145 lcd_init();
146
147 static char *message[] =
148 {
149 "RP2040 by", "Raspberry Pi",
150 "A brand new", "microcontroller",
151 "Twin core M0", "Full C SDK",
152 "More power in", "your product",
153 "More beans", "than Heinz!"
154 };
155
156 while (1) {
157 for (uint m = 0; m < sizeof(message) / sizeof(message[0]); m += MAX_LINES) {
158 for (int line = 0; line < MAX_LINES; line++) {
159 lcd_set_cursor(line, (MAX_CHARS / 2) - strlen(message[m + line]) / 2);
160 lcd_string(message[m + line]);
161 }
162 sleep_ms(2000);
163 lcd_clear();
164 }
165 }
166 #endif
167 }
Bill of Materials
Table 43. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
1602A based LCD panel 3.3v 1 generic part
1602A to I2C bridge device 3.3v 1 generic part
M/M Jumper wires 4 generic part
Raspberry Pi Pico-series C/C++ SDK
Attaching a 16x2 LCD via I2C 551
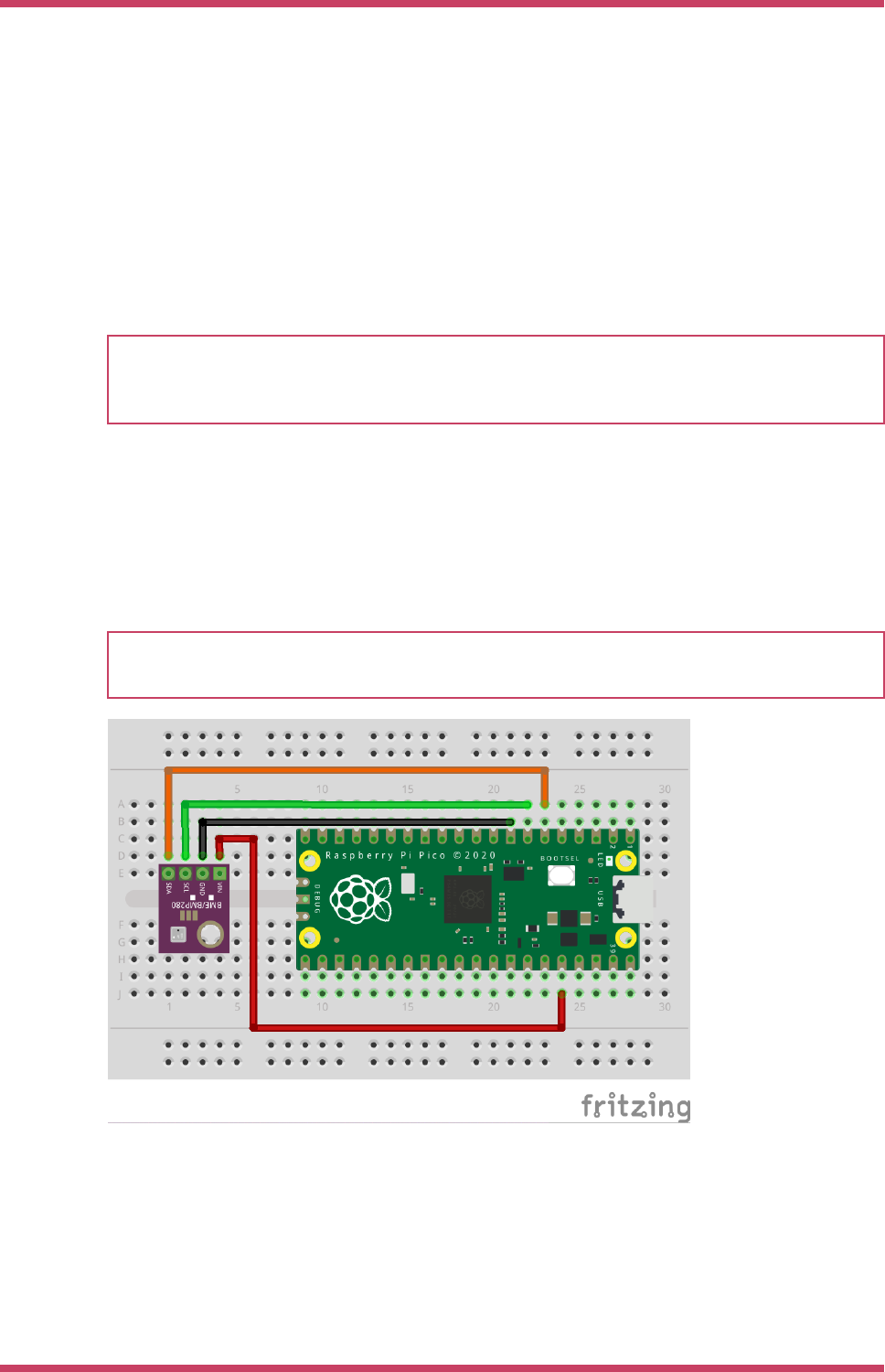
Attaching a BMP280 temp/pressure sensor via I2C
This example code shows how to interface the Raspberry Pi Pico with the popular BMP280 temperature and air
pressure sensor manufactured by Bosch. A similar variant, the BME280, exists that can also measure humidity. There is
another example that uses the BME280 device but talks to it via SPI as opposed to I2C.
The code reads data from the sensor’s registers every 500 milliseconds and prints it via the onboard UART. This
example operates the BMP280 in normal mode, meaning that the device continuously cycles between a measurement
period and a standby period at a regular interval we can set. This has the advantage that subsequent reads do not
require configuration register writes and is the recommended mode of operation to filter out short-term disturbances.
TIP
The BMP280 is highly configurable with 3 modes of operation, various oversampling levels, and 5 filter settings. Find
the datasheet online (https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-
bmp280-ds001.pdf) to explore all of its capabilities beyond the simple example given here.
Wiring information
Wiring up the device requires 4 jumpers, to connect VCC (3.3v), GND, SDA and SCL. The example here uses the default
I2C port 0, which is assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 3.3V pin from the
Pico.
WARNING
The BMP280 has a maximum supply voltage rating of 3.6V. Most breakout boards have voltage regulators that will
allow a range of input voltages of 2-6V, but make sure to check beforehand.
Figure 19. Wiring
Diagram for BMP280
sensor via I2C.
List of Files
CMakeLists.txt
CMake file to incorporate the example into the examples build tree.
Raspberry Pi Pico-series C/C++ SDK
Attaching a BMP280 temp/pressure sensor via I2C 552

Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/bmp280_i2c/CMakeLists.txt
Ê1 add_executable(bmp280_i2c
Ê2 bmp280_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(bmp280_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(bmp280_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(bmp280_i2c)
bmp280_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/bmp280_i2c/bmp280_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 **/
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8
ÊÊ9 #include "hardware/i2c.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "pico/stdlib.h"
Ê12
Ê13 /* Example code to talk to a BMP280 temperature and pressure sensor
Ê14
Ê15 NOTE: Ensure the device is capable of being driven at 3.3v NOT 5v. The Pico
Ê16 GPIO (and therefore I2C) cannot be used at 5v.
Ê17
Ê18 You will need to use a level shifter on the I2C lines if you want to run the
Ê19 board at 5v.
Ê20
Ê21 Connections on Raspberry Pi Pico board, other boards may vary.
Ê22
Ê23 GPIO PICO_DEFAULT_I2C_SDA_PIN (on Pico this is GP4 (pin 6)) -> SDA on BMP280
Ê24 board
Ê25 GPIO PICO_DEFAULT_I2C_SCK_PIN (on Pico this is GP5 (pin 7)) -> SCL on
Ê26 BMP280 board
Ê27 3.3v (pin 36) -> VCC on BMP280 board
Ê28 GND (pin 38) -> GND on BMP280 board
Ê29 */
Ê30
Ê31 // device has default bus address of 0x76
Ê32 #define ADDR _u(0x76)
Ê33
Ê34 // hardware registers
Ê35 #define REG_CONFIG _u(0xF5)
Ê36 #define REG_CTRL_MEAS _u(0xF4)
Ê37 #define REG_RESET _u(0xE0)
Ê38
Ê39 #define REG_TEMP_XLSB _u(0xFC)
Ê40 #define REG_TEMP_LSB _u(0xFB)
Ê41 #define REG_TEMP_MSB _u(0xFA)
Raspberry Pi Pico-series C/C++ SDK
Attaching a BMP280 temp/pressure sensor via I2C 553

Ê42
Ê43 #define REG_PRESSURE_XLSB _u(0xF9)
Ê44 #define REG_PRESSURE_LSB _u(0xF8)
Ê45 #define REG_PRESSURE_MSB _u(0xF7)
Ê46
Ê47 // calibration registers
Ê48 #define REG_DIG_T1_LSB _u(0x88)
Ê49 #define REG_DIG_T1_MSB _u(0x89)
Ê50 #define REG_DIG_T2_LSB _u(0x8A)
Ê51 #define REG_DIG_T2_MSB _u(0x8B)
Ê52 #define REG_DIG_T3_LSB _u(0x8C)
Ê53 #define REG_DIG_T3_MSB _u(0x8D)
Ê54 #define REG_DIG_P1_LSB _u(0x8E)
Ê55 #define REG_DIG_P1_MSB _u(0x8F)
Ê56 #define REG_DIG_P2_LSB _u(0x90)
Ê57 #define REG_DIG_P2_MSB _u(0x91)
Ê58 #define REG_DIG_P3_LSB _u(0x92)
Ê59 #define REG_DIG_P3_MSB _u(0x93)
Ê60 #define REG_DIG_P4_LSB _u(0x94)
Ê61 #define REG_DIG_P4_MSB _u(0x95)
Ê62 #define REG_DIG_P5_LSB _u(0x96)
Ê63 #define REG_DIG_P5_MSB _u(0x97)
Ê64 #define REG_DIG_P6_LSB _u(0x98)
Ê65 #define REG_DIG_P6_MSB _u(0x99)
Ê66 #define REG_DIG_P7_LSB _u(0x9A)
Ê67 #define REG_DIG_P7_MSB _u(0x9B)
Ê68 #define REG_DIG_P8_LSB _u(0x9C)
Ê69 #define REG_DIG_P8_MSB _u(0x9D)
Ê70 #define REG_DIG_P9_LSB _u(0x9E)
Ê71 #define REG_DIG_P9_MSB _u(0x9F)
Ê72
Ê73 // number of calibration registers to be read
Ê74 #define NUM_CALIB_PARAMS 24
Ê75
Ê76 struct bmp280_calib_param {
Ê77 // temperature params
Ê78 uint16_t dig_t1;
Ê79 int16_t dig_t2;
Ê80 int16_t dig_t3;
Ê81
Ê82 // pressure params
Ê83 uint16_t dig_p1;
Ê84 int16_t dig_p2;
Ê85 int16_t dig_p3;
Ê86 int16_t dig_p4;
Ê87 int16_t dig_p5;
Ê88 int16_t dig_p6;
Ê89 int16_t dig_p7;
Ê90 int16_t dig_p8;
Ê91 int16_t dig_p9;
Ê92 };
Ê93
Ê94 #ifdef i2c_default
Ê95 void bmp280_init() {
Ê96 // use the "handheld device dynamic" optimal setting (see datasheet)
Ê97 uint8_t buf[2];
Ê98
Ê99 // 500ms sampling time, x16 filter
100 const uint8_t reg_config_val = ((0x04 << 5) | (0x05 << 2)) & 0xFC;
101
102 // send register number followed by its corresponding value
103 buf[0] = REG_CONFIG;
104 buf[1] = reg_config_val;
105 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
Raspberry Pi Pico-series C/C++ SDK
Attaching a BMP280 temp/pressure sensor via I2C 554

106
107 // osrs_t x1, osrs_p x4, normal mode operation
108 const uint8_t reg_ctrl_meas_val = (0x01 << 5) | (0x03 << 2) | (0x03);
109 buf[0] = REG_CTRL_MEAS;
110 buf[1] = reg_ctrl_meas_val;
111 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
112 }
113
114 void bmp280_read_raw(int32_t* temp, int32_t* pressure) {
115 // BMP280 data registers are auto-incrementing and we have 3 temperature and
116 // pressure registers each, so we start at 0xF7 and read 6 bytes to 0xFC
117 // note: normal mode does not require further ctrl_meas and config register writes
118
119 uint8_t buf[6];
120 uint8_t reg = REG_PRESSURE_MSB;
121 i2c_write_blocking(i2c_default, ADDR, ®, 1, true); // true to keep master control of
Ê bus
122 i2c_read_blocking(i2c_default, ADDR, buf, 6, false); // false - finished with bus
123
124 // store the 20 bit read in a 32 bit signed integer for conversion
125 *pressure = (buf[0] << 12) | (buf[1] << 4) | (buf[2] >> 4);
126 *temp = (buf[3] << 12) | (buf[4] << 4) | (buf[5] >> 4);
127 }
128
129 void bmp280_reset() {
130 // reset the device with the power-on-reset procedure
131 uint8_t buf[2] = { REG_RESET, 0xB6 };
132 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
133 }
134
135 // intermediate function that calculates the fine resolution temperature
136 // used for both pressure and temperature conversions
137 int32_t bmp280_convert(int32_t temp, struct bmp280_calib_param* params) {
138 // use the 32-bit fixed point compensation implementation given in the
139 // datasheet
140
141 int32_t var1, var2;
142 var1 = ((((temp >> 3) - ((int32_t)params->dig_t1 << 1))) * ((int32_t)params->dig_t2)) >>
Ê 11;
143 var2 = (((((temp >> 4) - ((int32_t)params->dig_t1)) * ((temp >> 4) - ((int32_t)params-
Ê >dig_t1))) >> 12) * ((int32_t)params->dig_t3)) >> 14;
144 return var1 + var2;
145 }
146
147 int32_t bmp280_convert_temp(int32_t temp, struct bmp280_calib_param* params) {
148 // uses the BMP280 calibration parameters to compensate the temperature value read from
Ê its registers
149 int32_t t_fine = bmp280_convert(temp, params);
150 return (t_fine * 5 + 128) >> 8;
151 }
152
153 int32_t bmp280_convert_pressure(int32_t pressure, int32_t temp, struct bmp280_calib_param*
Ê params) {
154 // uses the BMP280 calibration parameters to compensate the pressure value read from its
Ê registers
155
156 int32_t t_fine = bmp280_convert(temp, params);
157
158 int32_t var1, var2;
159 uint32_t converted = 0.0;
160 var1 = (((int32_t)t_fine) >> 1) - (int32_t)64000;
161 var2 = (((var1 >> 2) * (var1 >> 2)) >> 11) * ((int32_t)params->dig_p6);
162 var2 += ((var1 * ((int32_t)params->dig_p5)) << 1);
163 var2 = (var2 >> 2) + (((int32_t)params->dig_p4) << 16);
Raspberry Pi Pico-series C/C++ SDK
Attaching a BMP280 temp/pressure sensor via I2C 555

164 var1 = (((params->dig_p3 * (((var1 >> 2) * (var1 >> 2)) >> 13)) >> 3) + ((((int32_t
Ê )params->dig_p2) * var1) >> 1)) >> 18;
165 var1 = ((((32768 + var1)) * ((int32_t)params->dig_p1)) >> 15);
166 if (var1 == 0) {
167 return 0; // avoid exception caused by division by zero
168 }
169 converted = (((uint32_t)(((int32_t)1048576) - pressure) - (var2 >> 12))) * 3125;
170 if (converted < 0x80000000) {
171 converted = (converted << 1) / ((uint32_t)var1);
172 } else {
173 converted = (converted / (uint32_t)var1) * 2;
174 }
175 var1 = (((int32_t)params->dig_p9) * ((int32_t)(((converted >> 3) * (converted >> 3)) >>
Ê 13))) >> 12;
176 var2 = (((int32_t)(converted >> 2)) * ((int32_t)params->dig_p8)) >> 13;
177 converted = (uint32_t)((int32_t)converted + ((var1 + var2 + params->dig_p7) >> 4));
178 return converted;
179 }
180
181 void bmp280_get_calib_params(struct bmp280_calib_param* params) {
182 // raw temp and pressure values need to be calibrated according to
183 // parameters generated during the manufacturing of the sensor
184 // there are 3 temperature params, and 9 pressure params, each with a LSB
185 // and MSB register, so we read from 24 registers
186
187 uint8_t buf[NUM_CALIB_PARAMS] = { 0 };
188 uint8_t reg = REG_DIG_T1_LSB;
189 i2c_write_blocking(i2c_default, ADDR, ®, 1, true); // true to keep master control of
Ê bus
190 // read in one go as register addresses auto-increment
191 i2c_read_blocking(i2c_default, ADDR, buf, NUM_CALIB_PARAMS, false); // false, we're
Ê done reading
192
193 // store these in a struct for later use
194 params->dig_t1 = (uint16_t)(buf[1] << 8) | buf[0];
195 params->dig_t2 = (int16_t)(buf[3] << 8) | buf[2];
196 params->dig_t3 = (int16_t)(buf[5] << 8) | buf[4];
197
198 params->dig_p1 = (uint16_t)(buf[7] << 8) | buf[6];
199 params->dig_p2 = (int16_t)(buf[9] << 8) | buf[8];
200 params->dig_p3 = (int16_t)(buf[11] << 8) | buf[10];
201 params->dig_p4 = (int16_t)(buf[13] << 8) | buf[12];
202 params->dig_p5 = (int16_t)(buf[15] << 8) | buf[14];
203 params->dig_p6 = (int16_t)(buf[17] << 8) | buf[16];
204 params->dig_p7 = (int16_t)(buf[19] << 8) | buf[18];
205 params->dig_p8 = (int16_t)(buf[21] << 8) | buf[20];
206 params->dig_p9 = (int16_t)(buf[23] << 8) | buf[22];
207 }
208
209 #endif
210
211 int main() {
212 stdio_init_all();
213
214 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
215 #warning i2c / bmp280_i2c example requires a board with I2C pins
216 puts("Default I2C pins were not defined");
217 return 0;
218 #else
219 // useful information for picotool
220 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
221 bi_decl(bi_program_description("BMP280 I2C example for the Raspberry Pi Pico"));
Raspberry Pi Pico-series C/C++ SDK
Attaching a BMP280 temp/pressure sensor via I2C 556

222
223 printf("Hello, BMP280! Reading temperaure and pressure values from sensor...\n");
224
225 // I2C is "open drain", pull ups to keep signal high when no data is being sent
226 i2c_init(i2c_default, 100 * 1000);
227 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
228 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
229 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
230 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
231
232 // configure BMP280
233 bmp280_init();
234
235 // retrieve fixed compensation params
236 struct bmp280_calib_param params;
237 bmp280_get_calib_params(¶ms);
238
239 int32_t raw_temperature;
240 int32_t raw_pressure;
241
242 sleep_ms(250); // sleep so that data polling and register update don't collide
243 while (1) {
244 bmp280_read_raw(&raw_temperature, &raw_pressure);
245 int32_t temperature = bmp280_convert_temp(raw_temperature, ¶ms);
246 int32_t pressure = bmp280_convert_pressure(raw_pressure, raw_temperature, ¶ms);
247 printf("Pressure = %.3f kPa\n", pressure / 1000.f);
248 printf("Temp. = %.2f C\n", temperature / 100.f);
249 // poll every 500ms
250 sleep_ms(500);
251 }
252 #endif
253 }
Bill of Materials
Table 44. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
BMP280-based breakout board 1 from Pimoroni
M/M Jumper wires 4 generic part
Attaching a LIS3DH Nano Accelerometer via i2c.
This example shows you how to interface the Raspberry Pi Pico to the LIS3DH accelerometer and temperature sensor.
The code reads and displays the acceleration values of the board in the 3 axes and the ambient temperature value. The
datasheet for the sensor can be found at https://www.st.com/resource/en/datasheet/cd00274221.pdf. The device is
being operated on 'normal mode' and at a frequency of 1.344 kHz (this can be changed by editing the ODR bits of
CTRL_REG4). The range of the data is controlled by the FS bit in CTRL_REG4 and is equal to ±2g in this example. The
sensitivity depends on the operating mode and data range; exact values can be found on page 10 of the datasheet. In
this case, the sensitivity value is 4mg (where g is the value of gravitational acceleration on the surface of Earth). In order
to use the auxiliary ADC to read temperature, the we must set the BDU bit to 1 in CTRL_REG4 and the ADC_EN bit to 1 in
TEMP_CFG_REG. Temperature is communicated through ADC 3.
Raspberry Pi Pico-series C/C++ SDK
Attaching a LIS3DH Nano Accelerometer via i2c. 557

NOTE
The sensor doesn’t have features to eliminate offsets in the data and these will need to be taken into account in the
code.
Wiring information
Wiring up the device requires 4 jumpers, to connect VIN, GND, SDA and SCL. The example here uses I2C port 0, which is
assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 3V pin.
Figure 20. Wiring
Diagram for LIS3DH.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/lis3dh_i2c/CMakeLists.txt
Ê1 add_executable(lis3dh_i2c
Ê2 lis3dh_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(lis3dh_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(lis3dh_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(lis3dh_i2c)
lis3dh_i2c.c
The example code.
Raspberry Pi Pico-series C/C++ SDK
Attaching a LIS3DH Nano Accelerometer via i2c. 558

Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/lis3dh_i2c/lis3dh_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to a LIS3DH Mini GPS module.
Ê14
Ê15 This example reads data from all 3 axes of the accelerometer and uses an auxiliary ADC to
Ê output temperature values.
Ê16
Ê17 Connections on Raspberry Pi Pico board, other boards may vary.
Ê18
Ê19 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is 4 (physical pin 6)) -> SDA on LIS3DH board
Ê20 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is 5 (physical pin 7)) -> SCL on LIS3DH board
Ê21 3.3v (physical pin 36) -> VIN on LIS3DH board
Ê22 GND (physical pin 38) -> GND on LIS3DH board
Ê23 */
Ê24
Ê25 // By default this device is on bus address 0x18
Ê26
Ê27 const int ADDRESS = 0x18;
Ê28 const uint8_t CTRL_REG_1 = 0x20;
Ê29 const uint8_t CTRL_REG_4 = 0x23;
Ê30 const uint8_t TEMP_CFG_REG = 0xC0;
Ê31
Ê32 #ifdef i2c_default
Ê33
Ê34 void lis3dh_init() {
Ê35 uint8_t buf[2];
Ê36
Ê37 // Turn normal mode and 1.344kHz data rate on
Ê38 buf[0] = CTRL_REG_1;
Ê39 buf[1] = 0x97;
Ê40 i2c_write_blocking(i2c_default, ADDRESS, buf, 2, false);
Ê41
Ê42 // Turn block data update on (for temperature sensing)
Ê43 buf[0] = CTRL_REG_4;
Ê44 buf[1] = 0x80;
Ê45 i2c_write_blocking(i2c_default, ADDRESS, buf, 2, false);
Ê46
Ê47 // Turn auxiliary ADC on
Ê48 buf[0] = TEMP_CFG_REG;
Ê49 buf[1] = 0xC0;
Ê50 i2c_write_blocking(i2c_default, ADDRESS, buf, 2, false);
Ê51 }
Ê52
Ê53 void lis3dh_calc_value(uint16_t raw_value, float *final_value, bool isAccel) {
Ê54 // Convert with respect to the value being temperature or acceleration reading
Ê55 float scaling;
Ê56 float senstivity = 0.004f; // g per unit
Ê57
Ê58 if (isAccel == true) {
Ê59 scaling = 64 / senstivity;
Ê60 } else {
Raspberry Pi Pico-series C/C++ SDK
Attaching a LIS3DH Nano Accelerometer via i2c. 559

Ê61 scaling = 64;
Ê62 }
Ê63
Ê64 // raw_value is signed
Ê65 *final_value = (float) ((int16_t) raw_value) / scaling;
Ê66 }
Ê67
Ê68 void lis3dh_read_data(uint8_t reg, float *final_value, bool IsAccel) {
Ê69 // Read two bytes of data and store in a 16 bit data structure
Ê70 uint8_t lsb;
Ê71 uint8_t msb;
Ê72 uint16_t raw_accel;
Ê73 i2c_write_blocking(i2c_default, ADDRESS, ®, 1, true);
Ê74 i2c_read_blocking(i2c_default, ADDRESS, &lsb, 1, false);
Ê75
Ê76 reg |= 0x01;
Ê77 i2c_write_blocking(i2c_default, ADDRESS, ®, 1, true);
Ê78 i2c_read_blocking(i2c_default, ADDRESS, &msb, 1, false);
Ê79
Ê80 raw_accel = (msb << 8) | lsb;
Ê81
Ê82 lis3dh_calc_value(raw_accel, final_value, IsAccel);
Ê83 }
Ê84
Ê85 #endif
Ê86
Ê87 int main() {
Ê88 stdio_init_all();
Ê89 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
Ê90 #warning i2c/lis3dh_i2c example requires a board with I2C pins
Ê91 puts("Default I2C pins were not defined");
Ê92 #else
Ê93 printf("Hello, LIS3DH! Reading raw data from registers...\n");
Ê94
Ê95 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
Ê96 i2c_init(i2c_default, 400 * 1000);
Ê97 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
Ê98 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
Ê99 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
100 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
101 // Make the I2C pins available to picotool
102 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
103
104 float x_accel, y_accel, z_accel, temp;
105
106 lis3dh_init();
107
108 while (1) {
109 lis3dh_read_data(0x28, &x_accel, true);
110 lis3dh_read_data(0x2A, &y_accel, true);
111 lis3dh_read_data(0x2C, &z_accel, true);
112 lis3dh_read_data(0x0C, &temp, false);
113
114 // Display data
115 printf("TEMPERATURE: %.3f%cC\n", temp, 176);
116 // Acceleration is read as a multiple of g (gravitational acceleration on the Earth's
Ê surface)
117 printf("ACCELERATION VALUES: \n");
118 printf("X acceleration: %.3fg\n", x_accel);
119 printf("Y acceleration: %.3fg\n", y_accel);
120 printf("Z acceleration: %.3fg\n", z_accel);
121
Raspberry Pi Pico-series C/C++ SDK
Attaching a LIS3DH Nano Accelerometer via i2c. 560

122 sleep_ms(500);
123
124 // Clear terminal
125 printf("\033[1;1H\033[2J");
126 }
127 #endif
128 }
Bill of Materials
Table 45. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
LIS3DH board 1 https://www.adafruit.com/product/
2809
M/M Jumper wires 4 generic part
Attaching a MCP9808 digital temperature sensor via I2C
This example code shows how to interface the Raspberry Pi Pico to the MCP9808 digital temperature sensor board.
This example reads the ambient temperature value each second from the sensor and sets upper, lower and critical
limits for the temperature and checks if alerts need to be raised. The CONFIG register can also be used to check for an
alert if the critical temperature is surpassed.
Wiring information
Wiring up the device requires 4 jumpers, to connect VDD, GND, SDA and SCL. The example here uses I2C port 0, which is
assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the VSYS pin.
Figure 21. Wiring
Diagram for MCP9808.
Raspberry Pi Pico-series C/C++ SDK
Attaching a MCP9808 digital temperature sensor via I2C 561

List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mcp9808_i2c/CMakeLists.txt
Ê1 add_executable(mcp9808_i2c
Ê2 mcp9808_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(mcp9808_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(mcp9808_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(mcp9808_i2c)
mcp9808_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mcp9808_i2c/mcp9808_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to a MCP9808 ±0.5°C Digital temperature Sensor
Ê14
Ê15 This reads and writes to registers on the board.
Ê16
Ê17 Connections on Raspberry Pi Pico board, other boards may vary.
Ê18
Ê19 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is GP4 (physical pin 6)) -> SDA on MCP9808
Ê board
Ê20 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is GP5 (physical pin 7)) -> SCL on MCP9808
Ê board
Ê21 Vsys (physical pin 39) -> VDD on MCP9808 board
Ê22 GND (physical pin 38) -> GND on MCP9808 board
Ê23
Ê24 */
Ê25 //The bus address is determined by the state of pins A0, A1 and A2 on the MCP9808 board
Ê26 static uint8_t ADDRESS = 0x18;
Ê27
Ê28 //hardware registers
Ê29
Ê30 const uint8_t REG_POINTER = 0x00;
Ê31 const uint8_t REG_CONFIG = 0x01;
Ê32 const uint8_t REG_TEMP_UPPER = 0x02;
Ê33 const uint8_t REG_TEMP_LOWER = 0x03;
Raspberry Pi Pico-series C/C++ SDK
Attaching a MCP9808 digital temperature sensor via I2C 562

Ê34 const uint8_t REG_TEMP_CRIT = 0x04;
Ê35 const uint8_t REG_TEMP_AMB = 0x05;
Ê36 const uint8_t REG_RESOLUTION = 0x08;
Ê37
Ê38
Ê39 void mcp9808_check_limits(uint8_t upper_byte) {
Ê40
Ê41 // Check flags and raise alerts accordingly
Ê42 if ((upper_byte & 0x40) == 0x40) { //TA > TUPPER
Ê43 printf("Temperature is above the upper temperature limit.\n");
Ê44 }
Ê45 if ((upper_byte & 0x20) == 0x20) { //TA < TLOWER
Ê46 printf("Temperature is below the lower temperature limit.\n");
Ê47 }
Ê48 if ((upper_byte & 0x80) == 0x80) { //TA > TCRIT
Ê49 printf("Temperature is above the critical temperature limit.\n");
Ê50 }
Ê51 }
Ê52
Ê53 float mcp9808_convert_temp(uint8_t upper_byte, uint8_t lower_byte) {
Ê54
Ê55 float temperature;
Ê56
Ê57
Ê58 //Check if TA <= 0°C and convert to denary accordingly
Ê59 if ((upper_byte & 0x10) == 0x10) {
Ê60 upper_byte = upper_byte & 0x0F;
Ê61 temperature = 256 - (((float) upper_byte * 16) + ((float) lower_byte / 16));
Ê62 } else {
Ê63 temperature = (((float) upper_byte * 16) + ((float) lower_byte / 16));
Ê64
Ê65 }
Ê66 return temperature;
Ê67 }
Ê68
Ê69 #ifdef i2c_default
Ê70 void mcp9808_set_limits() {
Ê71
Ê72 //Set an upper limit of 30°C for the temperature
Ê73 uint8_t upper_temp_msb = 0x01;
Ê74 uint8_t upper_temp_lsb = 0xE0;
Ê75
Ê76 //Set a lower limit of 20°C for the temperature
Ê77 uint8_t lower_temp_msb = 0x01;
Ê78 uint8_t lower_temp_lsb = 0x40;
Ê79
Ê80 //Set a critical limit of 40°C for the temperature
Ê81 uint8_t crit_temp_msb = 0x02;
Ê82 uint8_t crit_temp_lsb = 0x80;
Ê83
Ê84 uint8_t buf[3];
Ê85 buf[0] = REG_TEMP_UPPER;
Ê86 buf[1] = upper_temp_msb;
Ê87 buf[2] = upper_temp_lsb;
Ê88 i2c_write_blocking(i2c_default, ADDRESS, buf, 3, false);
Ê89
Ê90 buf[0] = REG_TEMP_LOWER;
Ê91 buf[1] = lower_temp_msb;
Ê92 buf[2] = lower_temp_lsb;
Ê93 i2c_write_blocking(i2c_default, ADDRESS, buf, 3, false);
Ê94
Ê95 buf[0] = REG_TEMP_CRIT;
Ê96 buf[1] = crit_temp_msb;
Ê97 buf[2] = crit_temp_lsb;;
Raspberry Pi Pico-series C/C++ SDK
Attaching a MCP9808 digital temperature sensor via I2C 563

Ê98 i2c_write_blocking(i2c_default, ADDRESS, buf, 3, false);
Ê99 }
100 #endif
101
102 int main() {
103
104 stdio_init_all();
105
106 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
107 #warning i2c/mcp9808_i2c example requires a board with I2C pins
108 puts("Default I2C pins were not defined");
109 #else
110 printf("Hello, MCP9808! Reading raw data from registers...\n");
111
112 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
113 i2c_init(i2c_default, 400 * 1000);
114 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
115 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
116 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
117 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
118 // Make the I2C pins available to picotool
119 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
120
121 mcp9808_set_limits();
122
123 uint8_t buf[2];
124 uint16_t upper_byte;
125 uint16_t lower_byte;
126
127 float temperature;
128
129 while (1) {
130 // Start reading ambient temperature register for 2 bytes
131 i2c_write_blocking(i2c_default, ADDRESS, ®_TEMP_AMB, 1, true);
132 i2c_read_blocking(i2c_default, ADDRESS, buf, 2, false);
133
134 upper_byte = buf[0];
135 lower_byte = buf[1];
136
137 //isolates limit flags in upper byte
138 mcp9808_check_limits(upper_byte & 0xE0);
139
140 //clears flag bits in upper byte
141 temperature = mcp9808_convert_temp(upper_byte & 0x1F, lower_byte);
142 printf("Ambient temperature: %.4f°C\n", temperature);
143
144 sleep_ms(1000);
145 }
146 #endif
147 }
Bill of Materials
Table 46. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico-series C/C++ SDK
Attaching a MCP9808 digital temperature sensor via I2C 564
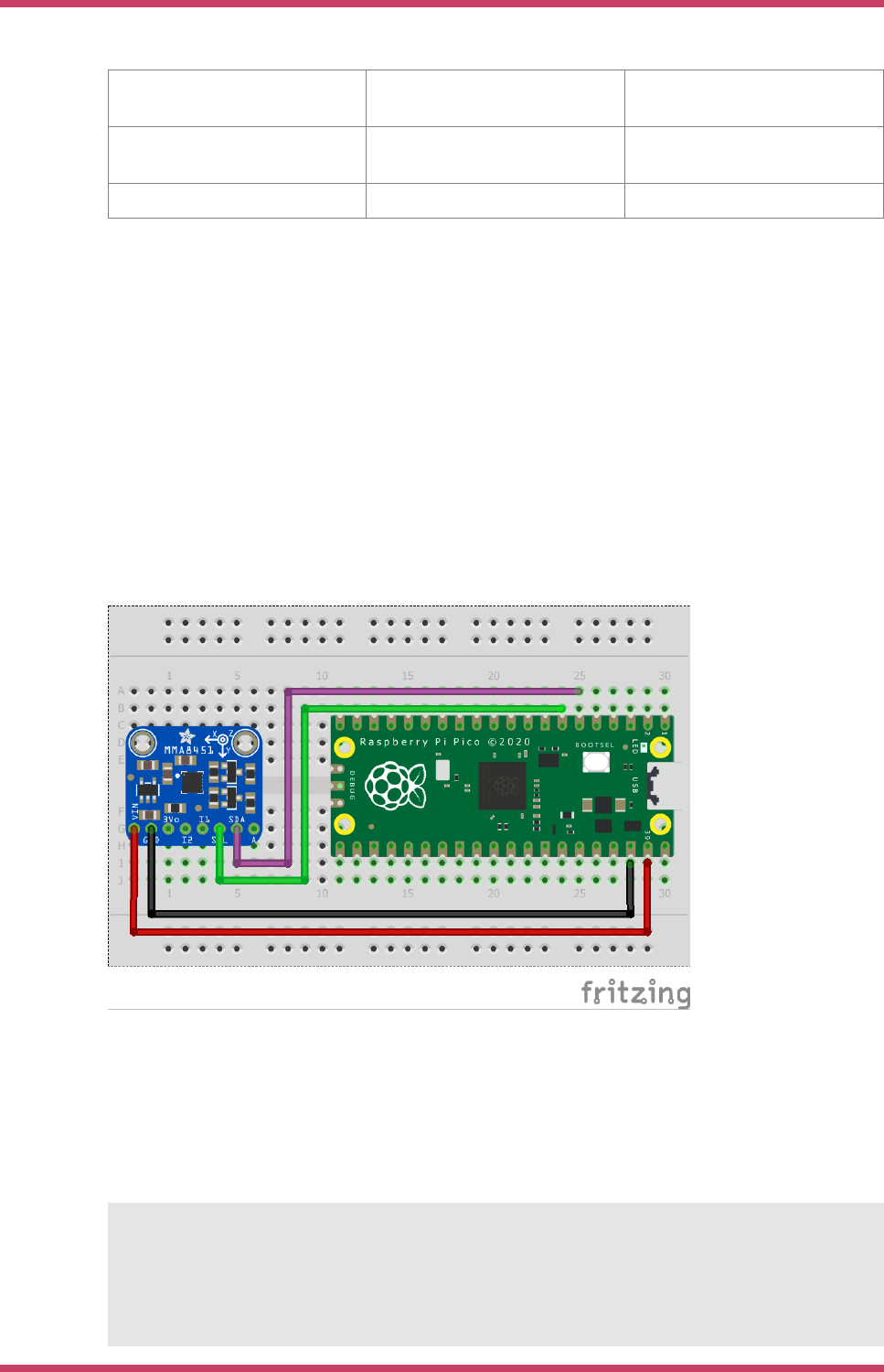
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
MCP9808 board 1 https://www.adafruit.com/product/
1782
M/M Jumper wires 4 generic part
Attaching a MMA8451 3-axis digital accelerometer via I2C
This example code shows how to interface the Raspberry Pi Pico to the MMA8451 digital accelerometer sensor board.
This example reads and displays the acceleration values of the board in the 3 axis. It also allows the user to set the
trade-off between the range and precision based on the values they require. Values often have an offset which can be
accounted for by writing to the offset correction registers. The datasheet for the sensor can be found at https://cdn-
shop.adafruit.com/datasheets/MMA8451Q-1.pdf for additional information.
Wiring information
Wiring up the device requires 4 jumpers, to connect VIN, GND, SDA and SCL. The example here uses I2C port 0, which is
assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the VSYS pin.
Figure 22. Wiring
Diagram for
MMA8451.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mma8451_i2c/CMakeLists.txt
Ê1 add_executable(mma8451_i2c
Ê2 mma8451_i2c.c
Ê3 )
Ê4 # pull in common dependencies and additional i2c hardware support
Ê5 target_link_libraries(mma8451_i2c pico_stdlib hardware_i2c)
Ê6
Raspberry Pi Pico-series C/C++ SDK
Attaching a MMA8451 3-axis digital accelerometer via I2C 565

Ê7 # create map/bin/hex file etc.
Ê8 pico_add_extra_outputs(mma8451_i2c)
Ê9
10 # add url via pico_set_program_url
11 example_auto_set_url(mma8451_i2c)
mma8451_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mma8451_i2c/mma8451_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to a MMA8451 triple-axis accelerometer.
Ê14
Ê15 This reads and writes to registers on the board.
Ê16
Ê17 Connections on Raspberry Pi Pico board, other boards may vary.
Ê18
Ê19 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is GP4 (physical pin 6)) -> SDA on MMA8451
Ê board
Ê20 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is GP5 (physical pin 7)) -> SCL on MMA8451
Ê board
Ê21 VSYS (physical pin 39) -> VDD on MMA8451 board
Ê22 GND (physical pin 38) -> GND on MMA8451 board
Ê23
Ê24 */
Ê25
Ê26 const uint8_t ADDRESS = 0x1D;
Ê27
Ê28 //hardware registers
Ê29
Ê30 const uint8_t REG_X_MSB = 0x01;
Ê31 const uint8_t REG_X_LSB = 0x02;
Ê32 const uint8_t REG_Y_MSB = 0x03;
Ê33 const uint8_t REG_Y_LSB = 0x04;
Ê34 const uint8_t REG_Z_MSB = 0x05;
Ê35 const uint8_t REG_Z_LSB = 0x06;
Ê36 const uint8_t REG_DATA_CFG = 0x0E;
Ê37 const uint8_t REG_CTRL_REG1 = 0x2A;
Ê38
Ê39 // Set the range and precision for the data
Ê40 const uint8_t range_config = 0x01; // 0x00 for ±2g, 0x01 for ±4g, 0x02 for ±8g
Ê41 const float count = 2048; // 4096 for ±2g, 2048 for ±4g, 1024 for ±8g
Ê42
Ê43 uint8_t buf[2];
Ê44
Ê45 float mma8451_convert_accel(uint16_t raw_accel) {
Ê46 float acceleration;
Ê47 // Acceleration is read as a multiple of g (gravitational acceleration on the Earth's
Ê surface)
Ê48 // Check if acceleration < 0 and convert to decimal accordingly
Raspberry Pi Pico-series C/C++ SDK
Attaching a MMA8451 3-axis digital accelerometer via I2C 566

Ê49 if ((raw_accel & 0x2000) == 0x2000) {
Ê50 raw_accel &= 0x1FFF;
Ê51 acceleration = (-8192 + (float) raw_accel) / count;
Ê52 } else {
Ê53 acceleration = (float) raw_accel / count;
Ê54 }
Ê55 acceleration *= 9.81f;
Ê56 return acceleration;
Ê57 }
Ê58
Ê59 #ifdef i2c_default
Ê60 void mma8451_set_state(uint8_t state) {
Ê61 buf[0] = REG_CTRL_REG1;
Ê62 buf[1] = state; // Set RST bit to 1
Ê63 i2c_write_blocking(i2c_default, ADDRESS, buf, 2, false);
Ê64 }
Ê65 #endif
Ê66
Ê67 int main() {
Ê68 stdio_init_all();
Ê69
Ê70 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
Ê71 #warning i2c/mma8451_i2c example requires a board with I2C pins
Ê72 puts("Default I2C pins were not defined");
Ê73 #else
Ê74 printf("Hello, MMA8451! Reading raw data from registers...\n");
Ê75
Ê76 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
Ê77 i2c_init(i2c_default, 400 * 1000);
Ê78 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
Ê79 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
Ê80 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
Ê81 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
Ê82 // Make the I2C pins available to picotool
Ê83 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
Ê84
Ê85 float x_acceleration;
Ê86 float y_acceleration;
Ê87 float z_acceleration;
Ê88
Ê89 // Enable standby mode
Ê90 mma8451_set_state(0x00);
Ê91
Ê92 // Edit configuration while in standby mode
Ê93 buf[0] = REG_DATA_CFG;
Ê94 buf[1] = range_config;
Ê95 i2c_write_blocking(i2c_default, ADDRESS, buf, 2, false);
Ê96
Ê97 // Enable active mode
Ê98 mma8451_set_state(0x01);
Ê99
100 while (1) {
101
102 // Start reading acceleration registers for 2 bytes
103 i2c_write_blocking(i2c_default, ADDRESS, ®_X_MSB, 1, true);
104 i2c_read_blocking(i2c_default, ADDRESS, buf, 2, false);
105 x_acceleration = mma8451_convert_accel(buf[0] << 6 | buf[1] >> 2);
106
107 i2c_write_blocking(i2c_default, ADDRESS, ®_Y_MSB, 1, true);
108 i2c_read_blocking(i2c_default, ADDRESS, buf, 2, false);
109 y_acceleration = mma8451_convert_accel(buf[0] << 6 | buf[1] >> 2);
110
Raspberry Pi Pico-series C/C++ SDK
Attaching a MMA8451 3-axis digital accelerometer via I2C 567

111 i2c_write_blocking(i2c_default, ADDRESS, ®_Z_MSB, 1, true);
112 i2c_read_blocking(i2c_default, ADDRESS, buf, 2, false);
113 z_acceleration = mma8451_convert_accel(buf[0] << 6 | buf[1] >> 2);
114
115 // Display acceleration values
116 printf("ACCELERATION VALUES: \n");
117 printf("X acceleration: %.6fms^-2\n", x_acceleration);
118 printf("Y acceleration: %.6fms^-2\n", y_acceleration);
119 printf("Z acceleration: %.6fms^-2\n", z_acceleration);
120
121 sleep_ms(500);
122
123 // Clear terminal
124 printf("\033[1;1H\033[2J");
125 }
126
127 #endif
128 }
Bill of Materials
Table 47. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
MMA8451 board 1 https://www.adafruit.com/product/
2019
M/M Jumper wires 4 generic part
Attaching an MPL3115A2 altimeter via I2C
This example code shows how to interface the Raspberry Pi Pico to an MPL3115A2 altimeter via I2C. The MPL3115A2
has onboard pressure and temperature sensors which are used to estimate the altitude. In comparison to the BMP-
family of pressure and temperature sensors, the MPL3115A2 has two interrupt pins for ultra low power operation and
takes care of the sensor reading compensation on the board! It also has multiple modes of operation and impressive
operating conditions.
The board used in this example comes from Adafruit, but any MPL3115A2 breakouts should work similarly.
The MPL3115A2 makes available two ways of reading its temperature and pressure data. The first is known as polling,
where the Pico will continuously read data out of a set of auto-incrementing registers which are refreshed with new data
every so often. The second, which this example will demonstrate, uses a 160-byte first-in-first-out (FIFO) queue and
configurable interrupts to tell the Pico when to read data. More information regarding when the interrupts can be
triggered available in the datasheet. This example waits for the 32 sample FIFO to overflow, detects this via an interrupt
pin, and then averages the 32 samples taken. The sensor is configured to take a sample every second.
Bit math is used to convert the temperature and altitude data from the raw bits collected in the registers. Take the
temperature calculation as an example: it is a 12-bit signed number with 8 integer bits and 4 fractional bits. First, we
read the 2 8-bit registers and store them in a buffer. Then, we concatenate them into one unsigned 16-bit integer
starting with the OUT_T_MSB register, thus making sure that the last bit of this register is aligned with the MSB in our 16
bit unsigned integer so it is correctly interpreted as the signed bit when we later cast this to a signed 16-bit integer.
Finally, the entire number is converted to a float implicitly when we multiply it by 1/2^8 to shift it 8 bits to the right of the
decimal point. Though only the last 4 bits of the OUT_T_LSB register hold data, this does not matter as the remaining 4
Raspberry Pi Pico-series C/C++ SDK
Attaching an MPL3115A2 altimeter via I2C 568

are held at zero and "disappear" when we shift the decimal point left by 8. Similar logic is applied to the altitude
calculation.
TIP
Choosing the right sensor for your project among so many choices can be hard! There are multiple factors you may
have to consider in addition to any constraints imposed on you. Cost, operating temperature, sensor resolution,
power consumption, ease of use, communication protocols and supply voltage are all but a few factors that can play
a role in sensor choice. For most hobbyist purposes though, the majority of sensors out there will do just fine!
Wiring information
Wiring up the device requires 5 jumpers, to connect VCC (3.3v), GND, INT1, SDA and SCL. The example here uses I2C
port 0, which is assigned to GPIO 4 (SDA) and GPIO 5 (SCL) by default. Power is supplied from the 3.3V pin.
NOTE
The MPL3115A2 has a 1.6-3.6V voltage supply range. This means it can work with the Pico’s 3.3v pins out of the box
but our Adafruit breakout has an onboard voltage regulator for good measure. This may not always be true of other
sensors, though.
Figure 23. Wiring
Diagram for
MPL3115A2 altimeter.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mpl3115a2_i2c/CMakeLists.txt
Ê1 add_executable(mpl3115a2_i2c
Ê2 mpl3115a2_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(mpl3115a2_i2c pico_stdlib hardware_i2c)
Ê7
Raspberry Pi Pico-series C/C++ SDK
Attaching an MPL3115A2 altimeter via I2C 569

Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(mpl3115a2_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(mpl3115a2_i2c)
mpl3115a2_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/mpl3115a2_i2c/mpl3115a2_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include "pico/stdlib.h"
ÊÊ9 #include "pico/binary_info.h"
Ê10 #include "hardware/gpio.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to an MPL3115A2 altimeter sensor via I2C
Ê14
Ê15 See accompanying documentation in README.adoc or the C++ SDK booklet.
Ê16
Ê17 Connections on Raspberry Pi Pico board, other boards may vary.
Ê18
Ê19 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is 4 (pin 6)) -> SDA on MPL3115A2 board
Ê20 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is 5 (pin 7)) -> SCL on MPL3115A2 board
Ê21 GPIO 16 -> INT1 on MPL3115A2 board
Ê22 3.3v (pin 36) -> VCC on MPL3115A2 board
Ê23 GND (pin 38) -> GND on MPL3115A2 board
Ê24 */
Ê25
Ê26 // 7-bit address
Ê27 #define ADDR 0x60
Ê28 #define INT1_PIN _u(16)
Ê29
Ê30 // following definitions only valid for F_MODE > 0 (ie. if FIFO enabled)
Ê31 #define MPL3115A2_F_DATA _u(0x01)
Ê32 #define MPL3115A2_F_STATUS _u(0x00)
Ê33 #define MPL3115A2_F_SETUP _u(0x0F)
Ê34 #define MPL3115A2_INT_SOURCE _u(0x12)
Ê35 #define MPL3115A2_CTRLREG1 _u(0x26)
Ê36 #define MPL3115A2_CTRLREG2 _u(0x27)
Ê37 #define MPL3115A2_CTRLREG3 _u(0x28)
Ê38 #define MPL3115A2_CTRLREG4 _u(0x29)
Ê39 #define MPL3115A2_CTRLREG5 _u(0x2A)
Ê40 #define MPL3115A2_PT_DATA_CFG _u(0x13)
Ê41 #define MPL3115A2_OFF_P _u(0x2B)
Ê42 #define MPL3115A2_OFF_T _u(0x2C)
Ê43 #define MPL3115A2_OFF_H _u(0x2D)
Ê44
Ê45 #define MPL3115A2_FIFO_DISABLED _u(0x00)
Ê46 #define MPL3115A2_FIFO_STOP_ON_OVERFLOW _u(0x80)
Ê47 #define MPL3115A2_FIFO_SIZE 32
Ê48 #define MPL3115A2_DATA_BATCH_SIZE 5
Ê49 #define MPL3115A2_ALTITUDE_NUM_REGS 3
Ê50 #define MPL3115A2_ALTITUDE_INT_SIZE 20
Ê51 #define MPL3115A2_TEMPERATURE_INT_SIZE 12
Raspberry Pi Pico-series C/C++ SDK
Attaching an MPL3115A2 altimeter via I2C 570

Ê52 #define MPL3115A2_NUM_FRAC_BITS 4
Ê53
Ê54 #define PARAM_ASSERTIONS_ENABLE_I2C 1
Ê55
Ê56 volatile uint8_t fifo_data[MPL3115A2_FIFO_SIZE * MPL3115A2_DATA_BATCH_SIZE];
Ê57 volatile bool has_new_data = false;
Ê58
Ê59 struct mpl3115a2_data_t {
Ê60 // Q8.4 fixed point
Ê61 float temperature;
Ê62 // Q16.4 fixed-point
Ê63 float altitude;
Ê64 };
Ê65
Ê66 void copy_to_vbuf(uint8_t buf1[], volatile uint8_t buf2[], uint buflen) {
Ê67 for (size_t i = 0; i < buflen; i++) {
Ê68 buf2[i] = buf1[i];
Ê69 }
Ê70 }
Ê71
Ê72 #ifdef i2c_default
Ê73
Ê74 void mpl3115a2_read_fifo(volatile uint8_t fifo_buf[]) {
Ê75 // drains the 160 byte FIFO
Ê76 uint8_t reg = MPL3115A2_F_DATA;
Ê77 uint8_t buf[MPL3115A2_FIFO_SIZE * MPL3115A2_DATA_BATCH_SIZE];
Ê78 i2c_write_blocking(i2c_default, ADDR, ®, 1, true);
Ê79 // burst read 160 bytes from fifo
Ê80 i2c_read_blocking(i2c_default, ADDR, buf, MPL3115A2_FIFO_SIZE *
Ê MPL3115A2_DATA_BATCH_SIZE, false);
Ê81 copy_to_vbuf(buf, fifo_buf, MPL3115A2_FIFO_SIZE * MPL3115A2_DATA_BATCH_SIZE);
Ê82 }
Ê83
Ê84 uint8_t mpl3115a2_read_reg(uint8_t reg) {
Ê85 uint8_t read;
Ê86 i2c_write_blocking(i2c_default, ADDR, ®, 1, true); // keep control of bus
Ê87 i2c_read_blocking(i2c_default, ADDR, &read, 1, false);
Ê88 return read;
Ê89 }
Ê90
Ê91 void mpl3115a2_init() {
Ê92 // set as altimeter with oversampling ratio of 128
Ê93 uint8_t buf[] = {MPL3115A2_CTRLREG1, 0xB8};
Ê94 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
Ê95
Ê96 // set data refresh every 2 seconds, 0 next bits as we're not using those interrupts
Ê97 buf[0] = MPL3115A2_CTRLREG2, buf[1] = 0x00;
Ê98 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
Ê99
100 // set both interrupts pins to active low and enable internal pullups
101 buf[0] = MPL3115A2_CTRLREG3, buf[1] = 0x01;
102 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
103
104 // enable FIFO interrupt
105 buf[0] = MPL3115A2_CTRLREG4, buf[1] = 0x40;
106 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
107
108 // tie FIFO interrupt to pin INT1
109 buf[0] = MPL3115A2_CTRLREG5, buf[1] = 0x40;
110 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
111
112 // set p, t and h offsets here if needed
113 // eg. 2's complement number: 0xFF subtracts 1 meter
114 //buf[0] = MPL3115A2_OFF_H, buf[1] = 0xFF;
Raspberry Pi Pico-series C/C++ SDK
Attaching an MPL3115A2 altimeter via I2C 571

115 //i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
116
117 // do not accept more data on FIFO overflow
118 buf[0] = MPL3115A2_F_SETUP, buf[1] = MPL3115A2_FIFO_STOP_ON_OVERFLOW;
119 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
120
121 // set device active
122 buf[0] = MPL3115A2_CTRLREG1, buf[1] = 0xB9;
123 i2c_write_blocking(i2c_default, ADDR, buf, 2, false);
124 }
125
126 void gpio_callback(uint gpio, __unused uint32_t events) {
127 // if we had enabled more than 2 interrupts on same pin, then we should read
128 // INT_SOURCE reg to find out which interrupt triggered
129
130 // we can filter by which GPIO was triggered
131 if (gpio == INT1_PIN) {
132 // FIFO overflow interrupt
133 // watermark bits set to 0 in F_SETUP reg, so only possible event is an overflow
134 // otherwise, we would read F_STATUS to confirm it was an overflow
135 printf("FIFO overflow!\n");
136 // drain the fifo
137 mpl3115a2_read_fifo(fifo_data);
138 // read status register to clear interrupt bit
139 mpl3115a2_read_reg(MPL3115A2_F_STATUS);
140 has_new_data = true;
141 }
142 }
143
144 #endif
145
146 void mpl3115a2_convert_fifo_batch(uint8_t start, volatile uint8_t buf[], struct
Ê mpl3115a2_data_t *data) {
147 // convert a batch of fifo data into temperature and altitude data
148
149 // 3 altitude registers: MSB (8 bits), CSB (8 bits) and LSB (4 bits, starting from MSB)
150 // first two are integer bits (2's complement) and LSB is fractional bits -> makes 20 bit
Ê signed integer
151 int32_t h = (int32_t) buf[start] << 24;
152 h |= (int32_t) buf[start + 1] << 16;
153 h |= (int32_t) buf[start + 2] << 8;
154 data->altitude = ((float)h) / 65536.f;
155
156 // 2 temperature registers: MSB (8 bits) and LSB (4 bits, starting from MSB)
157 // first 8 are integer bits with sign and LSB is fractional bits -> 12 bit signed integer
158 int16_t t = (int16_t) buf[start + 3] << 8;
159 t |= (int16_t) buf[start + 4];
160 data->temperature = ((float)t) / 256.f;
161 }
162
163 int main() {
164 stdio_init_all();
165 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
166 #warning i2c / mpl3115a2_i2c example requires a board with I2C pins
167 puts("Default I2C pins were not defined");
168 return 0;
169 #else
170 printf("Hello, MPL3115A2. Waiting for something to interrupt me!...\n");
171
172 // use default I2C0 at 400kHz, I2C is active low
173 i2c_init(i2c_default, 400 * 1000);
174 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
175 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
Raspberry Pi Pico-series C/C++ SDK
Attaching an MPL3115A2 altimeter via I2C 572

176 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
177 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
178
179 gpio_init(INT1_PIN);
180 gpio_pull_up(INT1_PIN); // pull it up even more!
181
182 // add program information for picotool
183 bi_decl(bi_program_name("Example in the pico-examples library for the MPL3115A2
Ê altimeter"));
184 bi_decl(bi_1pin_with_name(16, "Interrupt pin 1"));
185 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
186
187 mpl3115a2_init();
188
189 gpio_set_irq_enabled_with_callback(INT1_PIN, GPIO_IRQ_LEVEL_LOW, true, &gpio_callback);
190
191 while (1) {
192 // as interrupt data comes in, let's print the 32 sample average
193 if (has_new_data) {
194 float tsum = 0, hsum = 0;
195 struct mpl3115a2_data_t data;
196 for (int i = 0; i < MPL3115A2_FIFO_SIZE; i++) {
197 mpl3115a2_convert_fifo_batch(i * MPL3115A2_DATA_BATCH_SIZE, fifo_data, &
Ê data);
198 tsum += data.temperature;
199 hsum += data.altitude;
200 }
201 printf("%d sample average -> t: %.4f C, h: %.4f m\n", MPL3115A2_FIFO_SIZE, tsum
Ê / MPL3115A2_FIFO_SIZE,
202 hsum / MPL3115A2_FIFO_SIZE);
203 has_new_data = false;
204 }
205 sleep_ms(10);
206 };
207
208 #endif
209 }
Bill of Materials
Table 48. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
MPL3115A2 altimeter 1 Adafruit
M/M Jumper wires 5 generic part
Attaching an OLED display via I2C
This example code shows how to interface the Raspberry Pi Pico with an 128x32 OLED display board based on the
SSD1306 display driver, datasheet here.
The code displays a series of small demo graphics; tiny raspberries that scroll horizontally, some text, and some line
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 573
drawing, in the process showing you how to initialize the display, write to the entire display, write to only a portion of the
display, configure scrolling, invert the display etc.
The SSD1306 is operated via a list of versatile commands (see datasheet) that allows the user to access all the
capabilities of the driver. After sending a slave address, the data that follows can be either a command, flags to follow
up a command or data to be written directly into the display’s RAM. A control byte is required for each write after the
slave address so that the driver knows what type of data is being sent.
The example code supports displays of 32 pixel or 64 pixels high by 128 pixels wide by changing a define at the top of
the code.
In the 32 vertical pixels case, the display is partitioned into 4 pages, each 8 pixels in height. In RAM, this looks roughly
like:
Ê | COL0 | COL1 | COL2 | COL3 | ... | COL126 | COL127 |
Ê PAGE 0 | | | | | | | |
Ê PAGE 1 | | | | | | | |
Ê PAGE 2 | | | | | | | |
Ê PAGE 3 | | | | | | | |
Ê --------------------------------------------------------------
Within each page, we have:
Ê | COL0 | COL1 | COL2 | COL3 | ... | COL126 | COL127 |
Ê COM 0 | | | | | | | |
Ê COM 1 | | | | | | | |
Ê : | | | | | | | |
Ê COM 7 | | | | | | | |
Ê -------------------------------------------------------------
NOTE
There is a difference between columns in RAM and the actual segment pads that connect the driver to the display.
The RAM addresses COL0 - COL127 are mapped to these segment pins SEG0 - SEG127 by default. The distinction
between these two is important as we can for example, easily mirror contents of RAM without rewriting a buffer.
The driver has 3 modes of transferring the pixels in RAM to the display (provided that the driver is set to use its RAM
content to drive the display, ie. command 0xA4 is sent). We choose horizontal addressing mode which, after setting the
column address and page address registers to our desired start positions, will increment the column address register
until the OLED display width is reached (127 in our case) after which the column address register will reset to its
starting value and the page address is incremented. Once the page register reaches the end, it will wrap around as well.
Effectively, this scans across the display from top to bottom, left to right in blocks that are 8 pixels high. When a byte is
sent to be written into RAM, it sets all the rows for the current position of the column address register. So, if we send
10101010, and we are on PAGE 0 and COL1, COM0 is set to 1, COM1 is set to 0, COM2 is set to 1, and so on. Effectively,
the byte is "transposed" to fill a single page’s column. The datasheet has further information on this and the two other
modes.
Horizontal addressing mode has the key advantage that we can keep one single 512 byte buffer (128 columns x 4
pages and each byte fills a page’s rows) and write this in one go to the RAM (column address auto increments on writes
as well as reads) instead of working with 2D matrices of pixels and adding more overhead.
Wiring information
Wiring up the device requires 4 jumpers, to connect VCC (3.3v), GND, SDA and SCL and optionally a 5th jumper for the
driver RESET pin. The example here uses the default I2C port 0, which is assigned to GPIO 4 (SDA) and 5 (SCL) in
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 574

software. Power is supplied from the 3.3V pin from the Pico.
Figure 24. Wiring
Diagram for oled
display via I2C.
List of Files
CMakeLists.txt
CMake file to incorporate the example into the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/ssd1306_i2c/CMakeLists.txt
Ê1 add_executable(ssd1306_i2c
Ê2 ssd1306_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(ssd1306_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(ssd1306_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(ssd1306_i2c)
ssd1306_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/ssd1306_i2c/ssd1306_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2021 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include <stdlib.h>
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 575

Ê10 #include <ctype.h>
Ê11 #include "pico/stdlib.h"
Ê12 #include "pico/binary_info.h"
Ê13 #include "hardware/i2c.h"
Ê14 #include "raspberry26x32.h"
Ê15 #include "ssd1306_font.h"
Ê16
Ê17 /* Example code to talk to an SSD1306-based OLED display
Ê18
Ê19 The SSD1306 is an OLED/PLED driver chip, capable of driving displays up to
Ê20 128x64 pixels.
Ê21
Ê22 NOTE: Ensure the device is capable of being driven at 3.3v NOT 5v. The Pico
Ê23 GPIO (and therefore I2C) cannot be used at 5v.
Ê24
Ê25 You will need to use a level shifter on the I2C lines if you want to run the
Ê26 board at 5v.
Ê27
Ê28 Connections on Raspberry Pi Pico board, other boards may vary.
Ê29
Ê30 GPIO PICO_DEFAULT_I2C_SDA_PIN (on Pico this is GP4 (pin 6)) -> SDA on display
Ê31 board
Ê32 GPIO PICO_DEFAULT_I2C_SCL_PIN (on Pico this is GP5 (pin 7)) -> SCL on
Ê33 display board
Ê34 3.3v (pin 36) -> VCC on display board
Ê35 GND (pin 38) -> GND on display board
Ê36 */
Ê37
Ê38 // Define the size of the display we have attached. This can vary, make sure you
Ê39 // have the right size defined or the output will look rather odd!
Ê40 // Code has been tested on 128x32 and 128x64 OLED displays
Ê41 #define SSD1306_HEIGHT 32
Ê42 #define SSD1306_WIDTH 128
Ê43
Ê44 #define SSD1306_I2C_ADDR _u(0x3C)
Ê45
Ê46 // 400 is usual, but often these can be overclocked to improve display response.
Ê47 // Tested at 1000 on both 32 and 84 pixel height devices and it worked.
Ê48 #define SSD1306_I2C_CLK 400
Ê49 //#define SSD1306_I2C_CLK 1000
Ê50
Ê51
Ê52 // commands (see datasheet)
Ê53 #define SSD1306_SET_MEM_MODE _u(0x20)
Ê54 #define SSD1306_SET_COL_ADDR _u(0x21)
Ê55 #define SSD1306_SET_PAGE_ADDR _u(0x22)
Ê56 #define SSD1306_SET_HORIZ_SCROLL _u(0x26)
Ê57 #define SSD1306_SET_SCROLL _u(0x2E)
Ê58
Ê59 #define SSD1306_SET_DISP_START_LINE _u(0x40)
Ê60
Ê61 #define SSD1306_SET_CONTRAST _u(0x81)
Ê62 #define SSD1306_SET_CHARGE_PUMP _u(0x8D)
Ê63
Ê64 #define SSD1306_SET_SEG_REMAP _u(0xA0)
Ê65 #define SSD1306_SET_ENTIRE_ON _u(0xA4)
Ê66 #define SSD1306_SET_ALL_ON _u(0xA5)
Ê67 #define SSD1306_SET_NORM_DISP _u(0xA6)
Ê68 #define SSD1306_SET_INV_DISP _u(0xA7)
Ê69 #define SSD1306_SET_MUX_RATIO _u(0xA8)
Ê70 #define SSD1306_SET_DISP _u(0xAE)
Ê71 #define SSD1306_SET_COM_OUT_DIR _u(0xC0)
Ê72 #define SSD1306_SET_COM_OUT_DIR_FLIP _u(0xC0)
Ê73
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 576

Ê74 #define SSD1306_SET_DISP_OFFSET _u(0xD3)
Ê75 #define SSD1306_SET_DISP_CLK_DIV _u(0xD5)
Ê76 #define SSD1306_SET_PRECHARGE _u(0xD9)
Ê77 #define SSD1306_SET_COM_PIN_CFG _u(0xDA)
Ê78 #define SSD1306_SET_VCOM_DESEL _u(0xDB)
Ê79
Ê80 #define SSD1306_PAGE_HEIGHT _u(8)
Ê81 #define SSD1306_NUM_PAGES (SSD1306_HEIGHT / SSD1306_PAGE_HEIGHT)
Ê82 #define SSD1306_BUF_LEN (SSD1306_NUM_PAGES * SSD1306_WIDTH)
Ê83
Ê84 #define SSD1306_WRITE_MODE _u(0xFE)
Ê85 #define SSD1306_READ_MODE _u(0xFF)
Ê86
Ê87
Ê88 struct render_area {
Ê89 uint8_t start_col;
Ê90 uint8_t end_col;
Ê91 uint8_t start_page;
Ê92 uint8_t end_page;
Ê93
Ê94 int buflen;
Ê95 };
Ê96
Ê97 void calc_render_area_buflen(struct render_area *area) {
Ê98 // calculate how long the flattened buffer will be for a render area
Ê99 area->buflen = (area->end_col - area->start_col + 1) * (area->end_page - area-
Ê >start_page + 1);
100 }
101
102 #ifdef i2c_default
103
104 void SSD1306_send_cmd(uint8_t cmd) {
105 // I2C write process expects a control byte followed by data
106 // this "data" can be a command or data to follow up a command
107 // Co = 1, D/C = 0 => the driver expects a command
108 uint8_t buf[2] = {0x80, cmd};
109 i2c_write_blocking(i2c_default, SSD1306_I2C_ADDR, buf, 2, false);
110 }
111
112 void SSD1306_send_cmd_list(uint8_t *buf, int num) {
113 for (int i=0;i<num;i++)
114 SSD1306_send_cmd(buf[i]);
115 }
116
117 void SSD1306_send_buf(uint8_t buf[], int buflen) {
118 // in horizontal addressing mode, the column address pointer auto-increments
119 // and then wraps around to the next page, so we can send the entire frame
120 // buffer in one gooooooo!
121
122 // copy our frame buffer into a new buffer because we need to add the control byte
123 // to the beginning
124
125 uint8_t *temp_buf = malloc(buflen + 1);
126
127 temp_buf[0] = 0x40;
128 memcpy(temp_buf+1, buf, buflen);
129
130 i2c_write_blocking(i2c_default, SSD1306_I2C_ADDR, temp_buf, buflen + 1, false);
131
132 free(temp_buf);
133 }
134
135 void SSD1306_init() {
136 // Some of these commands are not strictly necessary as the reset
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 577

137 // process defaults to some of these but they are shown here
138 // to demonstrate what the initialization sequence looks like
139 // Some configuration values are recommended by the board manufacturer
140
141 uint8_t cmds[] = {
142 SSD1306_SET_DISP, // set display off
143 /* memory mapping */
144 SSD1306_SET_MEM_MODE, // set memory address mode 0 = horizontal, 1 =
Ê vertical, 2 = page
145 0x00, // horizontal addressing mode
146 /* resolution and layout */
147 SSD1306_SET_DISP_START_LINE, // set display start line to 0
148 SSD1306_SET_SEG_REMAP | 0x01, // set segment re-map, column address 127 is mapped
Ê to SEG0
149 SSD1306_SET_MUX_RATIO, // set multiplex ratio
150 SSD1306_HEIGHT - 1, // Display height - 1
151 SSD1306_SET_COM_OUT_DIR | 0x08, // set COM (common) output scan direction. Scan from
Ê bottom up, COM[N-1] to COM0
152 SSD1306_SET_DISP_OFFSET, // set display offset
153 0x00, // no offset
154 SSD1306_SET_COM_PIN_CFG, // set COM (common) pins hardware configuration.
Ê Board specific magic number.
155 // 0x02 Works for 128x32, 0x12 Possibly works for
Ê 128x64. Other options 0x22, 0x32
156 #if ((SSD1306_WIDTH == 128) && (SSD1306_HEIGHT == 32))
157 0x02,
158 #elif ((SSD1306_WIDTH == 128) && (SSD1306_HEIGHT == 64))
159 0x12,
160 #else
161 0x02,
162 #endif
163 /* timing and driving scheme */
164 SSD1306_SET_DISP_CLK_DIV, // set display clock divide ratio
165 0x80, // div ratio of 1, standard freq
166 SSD1306_SET_PRECHARGE, // set pre-charge period
167 0xF1, // Vcc internally generated on our board
168 SSD1306_SET_VCOM_DESEL, // set VCOMH deselect level
169 0x30, // 0.83xVcc
170 /* display */
171 SSD1306_SET_CONTRAST, // set contrast control
172 0xFF,
173 SSD1306_SET_ENTIRE_ON, // set entire display on to follow RAM content
174 SSD1306_SET_NORM_DISP, // set normal (not inverted) display
175 SSD1306_SET_CHARGE_PUMP, // set charge pump
176 0x14, // Vcc internally generated on our board
177 SSD1306_SET_SCROLL | 0x00, // deactivate horizontal scrolling if set. This is
Ê necessary as memory writes will corrupt if scrolling was enabled
178 SSD1306_SET_DISP | 0x01, // turn display on
179 };
180
181 SSD1306_send_cmd_list(cmds, count_of(cmds));
182 }
183
184 void SSD1306_scroll(bool on) {
185 // configure horizontal scrolling
186 uint8_t cmds[] = {
187 SSD1306_SET_HORIZ_SCROLL | 0x00,
188 0x00, // dummy byte
189 0x00, // start page 0
190 0x00, // time interval
191 0x03, // end page 3 SSD1306_NUM_PAGES ??
192 0x00, // dummy byte
193 0xFF, // dummy byte
194 SSD1306_SET_SCROLL | (on ? 0x01 : 0) // Start/stop scrolling
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 578

195 };
196
197 SSD1306_send_cmd_list(cmds, count_of(cmds));
198 }
199
200 void render(uint8_t *buf, struct render_area *area) {
201 // update a portion of the display with a render area
202 uint8_t cmds[] = {
203 SSD1306_SET_COL_ADDR,
204 area->start_col,
205 area->end_col,
206 SSD1306_SET_PAGE_ADDR,
207 area->start_page,
208 area->end_page
209 };
210
211 SSD1306_send_cmd_list(cmds, count_of(cmds));
212 SSD1306_send_buf(buf, area->buflen);
213 }
214
215 static void SetPixel(uint8_t *buf, int x,int y, bool on) {
216 assert(x >= 0 && x < SSD1306_WIDTH && y >=0 && y < SSD1306_HEIGHT);
217
218 // The calculation to determine the correct bit to set depends on which address
219 // mode we are in. This code assumes horizontal
220
221 // The video ram on the SSD1306 is split up in to 8 rows, one bit per pixel.
222 // Each row is 128 long by 8 pixels high, each byte vertically arranged, so byte 0 is x=0,
Ê y=0->7,
223 // byte 1 is x = 1, y=0->7 etc
224
225 // This code could be optimised, but is like this for clarity. The compiler
226 // should do a half decent job optimising it anyway.
227
228 const int BytesPerRow = SSD1306_WIDTH ; // x pixels, 1bpp, but each row is 8 pixel high,
Ê so (x / 8) * 8
229
230 int byte_idx = (y / 8) * BytesPerRow + x;
231 uint8_t byte = buf[byte_idx];
232
233 if (on)
234 byte |= 1 << (y % 8);
235 else
236 byte &= ~(1 << (y % 8));
237
238 buf[byte_idx] = byte;
239 }
240 // Basic Bresenhams.
241 static void DrawLine(uint8_t *buf, int x0, int y0, int x1, int y1, bool on) {
242
243 int dx = abs(x1-x0);
244 int sx = x0<x1 ? 1 : -1;
245 int dy = -abs(y1-y0);
246 int sy = y0<y1 ? 1 : -1;
247 int err = dx+dy;
248 int e2;
249
250 while (true) {
251 SetPixel(buf, x0, y0, on);
252 if (x0 == x1 && y0 == y1)
253 break;
254 e2 = 2*err;
255
256 if (e2 >= dy) {
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 579

257 err += dy;
258 x0 += sx;
259 }
260 if (e2 <= dx) {
261 err += dx;
262 y0 += sy;
263 }
264 }
265 }
266
267 static inline int GetFontIndex(uint8_t ch) {
268 if (ch >= 'A' && ch <='Z') {
269 return ch - 'A' + 1;
270 }
271 else if (ch >= '0' && ch <='9') {
272 return ch - '0' + 27;
273 }
274 else return 0; // Not got that char so space.
275 }
276
277 static void WriteChar(uint8_t *buf, int16_t x, int16_t y, uint8_t ch) {
278 if (x > SSD1306_WIDTH - 8 || y > SSD1306_HEIGHT - 8)
279 return;
280
281 // For the moment, only write on Y row boundaries (every 8 vertical pixels)
282 y = y/8;
283
284 ch = toupper(ch);
285 int idx = GetFontIndex(ch);
286 int fb_idx = y * 128 + x;
287
288 for (int i=0;i<8;i++) {
289 buf[fb_idx++] = font[idx * 8 + i];
290 }
291 }
292
293 static void WriteString(uint8_t *buf, int16_t x, int16_t y, char *str) {
294 // Cull out any string off the screen
295 if (x > SSD1306_WIDTH - 8 || y > SSD1306_HEIGHT - 8)
296 return;
297
298 while (*str) {
299 WriteChar(buf, x, y, *str++);
300 x+=8;
301 }
302 }
303
304
305
306 #endif
307
308 int main() {
309 stdio_init_all();
310
311 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
312 #warning i2c / SSD1306_i2d example requires a board with I2C pins
313 puts("Default I2C pins were not defined");
314 #else
315 // useful information for picotool
316 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
317 bi_decl(bi_program_description("SSD1306 OLED driver I2C example for the Raspberry Pi
Ê Pico"));
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 580

318
319 printf("Hello, SSD1306 OLED display! Look at my raspberries..\n");
320
321 // I2C is "open drain", pull ups to keep signal high when no data is being
322 // sent
323 i2c_init(i2c_default, SSD1306_I2C_CLK * 1000);
324 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
325 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
326 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
327 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
328
329 // run through the complete initialization process
330 SSD1306_init();
331
332 // Initialize render area for entire frame (SSD1306_WIDTH pixels by SSD1306_NUM_PAGES
Ê pages)
333 struct render_area frame_area = {
334 start_col: 0,
335 end_col : SSD1306_WIDTH - 1,
336 start_page : 0,
337 end_page : SSD1306_NUM_PAGES - 1
338 };
339
340 calc_render_area_buflen(&frame_area);
341
342 // zero the entire display
343 uint8_t buf[SSD1306_BUF_LEN];
344 memset(buf, 0, SSD1306_BUF_LEN);
345 render(buf, &frame_area);
346
347 // intro sequence: flash the screen 3 times
348 for (int i = 0; i < 3; i++) {
349 SSD1306_send_cmd(SSD1306_SET_ALL_ON); // Set all pixels on
350 sleep_ms(500);
351 SSD1306_send_cmd(SSD1306_SET_ENTIRE_ON); // go back to following RAM for pixel state
352 sleep_ms(500);
353 }
354
355 // render 3 cute little raspberries
356 struct render_area area = {
357 start_page : 0,
358 end_page : (IMG_HEIGHT / SSD1306_PAGE_HEIGHT) - 1
359 };
360
361 restart:
362
363 area.start_col = 0;
364 area.end_col = IMG_WIDTH - 1;
365
366 calc_render_area_buflen(&area);
367
368 uint8_t offset = 5 + IMG_WIDTH; // 5px padding
369
370 for (int i = 0; i < 3; i++) {
371 render(raspberry26x32, &area);
372 area.start_col += offset;
373 area.end_col += offset;
374 }
375
376 SSD1306_scroll(true);
377 sleep_ms(5000);
378 SSD1306_scroll(false);
379
380 char *text[] = {
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 581

381 "A long time ago",
382 " on an OLED ",
383 " display",
384 " far far away",
385 "Lived a small",
386 "red raspberry",
387 "by the name of",
388 " PICO"
389 };
390
391 int y = 0;
392 for (uint i = 0 ;i < count_of(text); i++) {
393 WriteString(buf, 5, y, text[i]);
394 y+=8;
395 }
396 render(buf, &frame_area);
397
398 // Test the display invert function
399 sleep_ms(3000);
400 SSD1306_send_cmd(SSD1306_SET_INV_DISP);
401 sleep_ms(3000);
402 SSD1306_send_cmd(SSD1306_SET_NORM_DISP);
403
404 bool pix = true;
405 for (int i = 0; i < 2;i++) {
406 for (int x = 0;x < SSD1306_WIDTH;x++) {
407 DrawLine(buf, x, 0, SSD1306_WIDTH - 1 - x, SSD1306_HEIGHT - 1, pix);
408 render(buf, &frame_area);
409 }
410
411 for (int y = SSD1306_HEIGHT-1; y >= 0 ;y--) {
412 DrawLine(buf, 0, y, SSD1306_WIDTH - 1, SSD1306_HEIGHT - 1 - y, pix);
413 render(buf, &frame_area);
414 }
415 pix = false;
416 }
417
418 goto restart;
419
420 #endif
421 return 0;
422 }
ssd1306_font.h
A simple font used in the example.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/ssd1306_i2c/ssd1306_font.h
Ê1 /**
Ê2 * Copyright (c) 2022 Raspberry Pi (Trading) Ltd.
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 */
Ê6
Ê7 // Vertical bitmaps, A-Z, 0-9. Each is 8 pixels high and wide
Ê8 // These are defined vertically to make them quick to copy to FB
Ê9
10 static uint8_t font[] = {
11 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, // Nothing
12 0x78, 0x14, 0x12, 0x11, 0x12, 0x14, 0x78, 0x00, //A
13 0x7f, 0x49, 0x49, 0x49, 0x49, 0x49, 0x7f, 0x00, //B
14 0x7e, 0x41, 0x41, 0x41, 0x41, 0x41, 0x41, 0x00, //C
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 582

15 0x7f, 0x41, 0x41, 0x41, 0x41, 0x41, 0x7e, 0x00, //D
16 0x7f, 0x49, 0x49, 0x49, 0x49, 0x49, 0x49, 0x00, //E
17 0x7f, 0x09, 0x09, 0x09, 0x09, 0x01, 0x01, 0x00, //F
18 0x7f, 0x41, 0x41, 0x41, 0x51, 0x51, 0x73, 0x00, //G
19 0x7f, 0x08, 0x08, 0x08, 0x08, 0x08, 0x7f, 0x00, //H
20 0x00, 0x00, 0x00, 0x7f, 0x00, 0x00, 0x00, 0x00, //I
21 0x21, 0x41, 0x41, 0x3f, 0x01, 0x01, 0x01, 0x00, //J
22 0x00, 0x7f, 0x08, 0x08, 0x14, 0x22, 0x41, 0x00, //K
23 0x7f, 0x40, 0x40, 0x40, 0x40, 0x40, 0x40, 0x00, //L
24 0x7f, 0x02, 0x04, 0x08, 0x04, 0x02, 0x7f, 0x00, //M
25 0x7f, 0x02, 0x04, 0x08, 0x10, 0x20, 0x7f, 0x00, //N
26 0x3e, 0x41, 0x41, 0x41, 0x41, 0x41, 0x3e, 0x00, //O
27 0x7f, 0x11, 0x11, 0x11, 0x11, 0x11, 0x0e, 0x00, //P
28 0x3e, 0x41, 0x41, 0x49, 0x51, 0x61, 0x7e, 0x00, //Q
29 0x7f, 0x11, 0x11, 0x11, 0x31, 0x51, 0x0e, 0x00, //R
30 0x46, 0x49, 0x49, 0x49, 0x49, 0x30, 0x00, 0x00, //S
31 0x01, 0x01, 0x01, 0x7f, 0x01, 0x01, 0x01, 0x00, //T
32 0x3f, 0x40, 0x40, 0x40, 0x40, 0x40, 0x3f, 0x00, //U
33 0x0f, 0x10, 0x20, 0x40, 0x20, 0x10, 0x0f, 0x00, //V
34 0x7f, 0x20, 0x10, 0x08, 0x10, 0x20, 0x7f, 0x00, //W
35 0x00, 0x41, 0x22, 0x14, 0x14, 0x22, 0x41, 0x00, //X
36 0x01, 0x02, 0x04, 0x78, 0x04, 0x02, 0x01, 0x00, //Y
37 0x41, 0x61, 0x59, 0x45, 0x43, 0x41, 0x00, 0x00, //Z
38 0x3e, 0x41, 0x41, 0x49, 0x41, 0x41, 0x3e, 0x00, //0
39 0x00, 0x00, 0x42, 0x7f, 0x40, 0x00, 0x00, 0x00, //1
40 0x30, 0x49, 0x49, 0x49, 0x49, 0x46, 0x00, 0x00, //2
41 0x49, 0x49, 0x49, 0x49, 0x49, 0x49, 0x36, 0x00, //3
42 0x3f, 0x20, 0x20, 0x78, 0x20, 0x20, 0x00, 0x00, //4
43 0x4f, 0x49, 0x49, 0x49, 0x49, 0x30, 0x00, 0x00, //5
44 0x3f, 0x48, 0x48, 0x48, 0x48, 0x48, 0x30, 0x00, //6
45 0x01, 0x01, 0x01, 0x61, 0x31, 0x0d, 0x03, 0x00, //7
46 0x36, 0x49, 0x49, 0x49, 0x49, 0x49, 0x36, 0x00, //8
47 0x06, 0x09, 0x09, 0x09, 0x09, 0x09, 0x7f, 0x00, //9
48 };
img_to_array.py
A helper to convert an image file to an array that can be used in the example.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/ssd1306_i2c/img_to_array.py
Ê1 #!/usr/bin/env python3
Ê2
Ê3 # Converts a grayscale image into a format able to be
Ê4 # displayed by the SSD1306 driver in horizontal addressing mode
Ê5
Ê6 # usage: python3 img_to_array.py <logo.bmp>
Ê7
Ê8 # depends on the Pillow library
Ê9 # `python3 -m pip install --upgrade Pillow`
10
11 from PIL import Image
12 import sys
13 from pathlib import Path
14
15 OLED_HEIGHT = 32
16 OLED_WIDTH = 128
17 OLED_PAGE_HEIGHT = 8
18
19 if len(sys.argv) < 2:
20 print("No image path provided.")
21 sys.exit()
22
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 583

23 img_path = sys.argv[1]
24
25 try:
26 im = Image.open(img_path)
27 except OSError:
28 raise Exception("Oops! The image could not be opened.")
29
30 img_width = im.size[0]
31 img_height = im.size[1]
32
33 if img_width > OLED_WIDTH or img_height > OLED_HEIGHT:
34 print(f'Your image is f{img_width} pixels wide and {img_height} pixels high, but...')
35 raise Exception(f"OLED display only {OLED_WIDTH} pixels wide and {OLED_HEIGHT} pixels
Ê high!")
36
37 if not (im.mode == "1" or im.mode == "L"):
38 raise Exception("Image must be grayscale only")
39
40 # black or white
41 out = im.convert("1")
42
43 img_name = Path(im.filename).stem
44
45 # `pixels` is a flattened array with the top left pixel at index 0
46 # and bottom right pixel at the width*height-1
47 pixels = list(out.getdata())
48
49 # swap white for black and swap (255, 0) for (1, 0)
50 pixels = [0 if x == 255 else 1 for x in pixels]
51
52 # our goal is to divide the image into 8-pixel high pages
53 # and turn a pixel column into one byte, eg for one page:
54 # 0 1 0 ....
55 # 1 0 0
56 # 1 1 1
57 # 0 0 1
58 # 1 1 0
59 # 0 1 0
60 # 1 1 1
61 # 0 0 1 ....
62
63 # we get 0x6A, 0xAE, 0x33 ... and so on
64 # as `pixels` is flattened, each bit in a column is IMG_WIDTH apart from the next
65
66 buffer = []
67 for i in range(img_height // OLED_PAGE_HEIGHT):
68 start_index = i*img_width*OLED_PAGE_HEIGHT
69 for j in range(img_width):
70 out_byte = 0
71 for k in range(OLED_PAGE_HEIGHT):
72 out_byte |= pixels[k*img_width + start_index + j] << k
73 buffer.append(f'{out_byte:#04x}')
74
75 buffer = ", ".join(buffer)
76 buffer_hex = f'static uint8_t {img_name}[] = {{{buffer}}};\n'
77
78 with open(f'{img_name}.h', 'wt') as file:
79 file.write(f'#define IMG_WIDTH {img_width}\n')
80 file.write(f'#define IMG_HEIGHT {img_height}\n\n')
81 file.write(buffer_hex)
Raspberry Pi Pico-series C/C++ SDK
Attaching an OLED display via I2C 584
raspberry26x32.bmp
Example image file of a Raspberry.
raspberry26x32.h
The example image file converted to an C array.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/ssd1306_i2c/raspberry26x32.h
1 #define IMG_WIDTH 26
2 #define IMG_HEIGHT 32
3
4 static uint8_t raspberry26x32[] = { 0x0, 0x0, 0xe, 0x7e, 0xfe, 0xff, 0xff, 0xff, 0xff, 0xff,
Ê 0xfe, 0xfe, 0xfc, 0xf8, 0xfc, 0xfe, 0xfe, 0xff, 0xff, 0xff, 0xff, 0xff, 0xfe, 0x7e, 0x1e, 0x0,
Ê 0x0, 0x0, 0x80, 0xe0, 0xf8, 0xfd, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff,
Ê 0xff, 0xff, 0xff, 0xff, 0xff, 0xfd, 0xf8, 0xe0, 0x80, 0x0, 0x0, 0x1e, 0x7f, 0xff, 0xff, 0xff,
Ê 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff, 0xff,
Ê 0xff, 0xff, 0xff, 0x7f, 0x1e, 0x0, 0x0, 0x0, 0x3, 0x7, 0xf, 0x1f, 0x1f, 0x3f, 0x3f, 0x7f,
Ê 0xff, 0xff, 0xff, 0xff, 0x7f, 0x7f, 0x3f, 0x3f, 0x1f, 0x1f, 0xf, 0x7, 0x3, 0x0, 0x0};
Bill of Materials
Table 49. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
SSD1306-based OLED display 1 Adafruit part
M/M Jumper wires 4 generic part
Attaching a PA1010D Mini GPS module via I2C
This example code shows how to interface the Raspberry Pi Pico to the PA1010D Mini GPS module
This allows you to read basic location and time data from the Recommended Minimum Specific GNSS Sentence
(GNRMC protocol) and displays it in a user-friendly format. The datasheet for the module can be found on https://cdn-
learn.adafruit.com/assets/assets/000/084/295/original/CD_PA1010D_Datasheet_v.03.pdf?1573833002. The output
sentence is read and parsed to split the data fields into a 2D character array, which are then individually printed out. The
commands to use different protocols and change settings are found on https://www.sparkfun.com/datasheets/GPS/
Modules/PMTK_Protocol.pdf. Additional protocols can be used by editing the init_command array.
NOTE
Each command requires a checksum after the asterisk. The checksum can be calculated for your command using
the following website: https://nmeachecksum.eqth.net/.
The GPS needs to be used outdoors in open skies and requires about 15 seconds to acquire a satellite signal in
order to display valid data. When the signal is detected, the device will blink a green LED at 1 Hz.
Wiring information
Wiring up the device requires 4 jumpers, to connect VDD, GND, SDA and SCL. The example here uses I2C port 0, which is
assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 3V pin.
Raspberry Pi Pico-series C/C++ SDK
Attaching a PA1010D Mini GPS module via I2C 585

Figure 25. Wiring
Diagram for PA1010D.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/pa1010d_i2c/CMakeLists.txt
Ê1 add_executable(pa1010d_i2c
Ê2 pa1010d_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(pa1010d_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(pa1010d_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(pa1010d_i2c)
pa1010d_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/pa1010d_i2c/pa1010d_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12 #include "string.h"
Ê13
Raspberry Pi Pico-series C/C++ SDK
Attaching a PA1010D Mini GPS module via I2C 586

Ê14 /* Example code to talk to a PA1010D Mini GPS module.
Ê15
Ê16 This example reads the Recommended Minimum Specific GNSS Sentence, which includes basic
Ê location and time data, each second, formats and displays it.
Ê17
Ê18 Connections on Raspberry Pi Pico board, other boards may vary.
Ê19
Ê20 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is 4 (physical pin 6)) -> SDA on PA1010D board
Ê21 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is 5 (physical pin 7)) -> SCL on PA1010D board
Ê22 3.3v (physical pin 36) -> VCC on PA1010D board
Ê23 GND (physical pin 38) -> GND on PA1010D board
Ê24 */
Ê25
Ê26 const int addr = 0x10;
Ê27 #define MAX_READ 250
Ê28
Ê29 #ifdef i2c_default
Ê30
Ê31 void pa1010d_write_command(const char command[], int com_length) {
Ê32 // Convert character array to bytes for writing
Ê33 uint8_t int_command[com_length];
Ê34
Ê35 for (int i = 0; i < com_length; ++i) {
Ê36 int_command[i] = command[i];
Ê37 i2c_write_blocking(i2c_default, addr, &int_command[i], 1, true);
Ê38 }
Ê39 }
Ê40
Ê41 void pa1010d_parse_string(char output[], char protocol[]) {
Ê42 // Finds location of protocol message in output
Ê43 char *com_index = strstr(output, protocol);
Ê44 int p = com_index - output;
Ê45
Ê46 // Splits components of output sentence into array
Ê47 #define NO_OF_FIELDS 14
Ê48 #define MAX_LEN 15
Ê49
Ê50 int n = 0;
Ê51 int m = 0;
Ê52
Ê53 char gps_data[NO_OF_FIELDS][MAX_LEN];
Ê54 memset(gps_data, 0, sizeof(gps_data));
Ê55
Ê56 bool complete = false;
Ê57 while (output[p] != '$' && n < MAX_LEN && complete == false) {
Ê58 if (output[p] == ',' || output[p] == '*') {
Ê59 n += 1;
Ê60 m = 0;
Ê61 } else {
Ê62 gps_data[n][m] = output[p];
Ê63 // Checks if sentence is complete
Ê64 if (m < NO_OF_FIELDS) {
Ê65 m++;
Ê66 } else {
Ê67 complete = true;
Ê68 }
Ê69 }
Ê70 p++;
Ê71 }
Ê72
Ê73 // Displays GNRMC data
Ê74 // Similarly, additional if statements can be used to add more protocols
Ê75 if (strcmp(protocol, "GNRMC") == 0) {
Ê76 printf("Protocol:%s\n", gps_data[0]);
Raspberry Pi Pico-series C/C++ SDK
Attaching a PA1010D Mini GPS module via I2C 587

Ê77 printf("UTC Time: %s\n", gps_data[1]);
Ê78 printf("Status: %s\n", gps_data[2][0] == 'V' ? "Data invalid. GPS fix not found." :
Ê "Data Valid");
Ê79 printf("Latitude: %s\n", gps_data[3]);
Ê80 printf("N/S indicator: %s\n", gps_data[4]);
Ê81 printf("Longitude: %s\n", gps_data[5]);
Ê82 printf("E/W indicator: %s\n", gps_data[6]);
Ê83 printf("Speed over ground: %s\n", gps_data[7]);
Ê84 printf("Course over ground: %s\n", gps_data[8]);
Ê85 printf("Date: %c%c/%c%c/%c%c\n", gps_data[9][0], gps_data[9][1], gps_data[9][2],
Ê gps_data[9][3], gps_data[9][4],
Ê86 gps_data[9][5]);
Ê87 printf("Magnetic Variation: %s\n", gps_data[10]);
Ê88 printf("E/W degree indicator: %s\n", gps_data[11]);
Ê89 printf("Mode: %s\n", gps_data[12]);
Ê90 printf("Checksum: %c%c\n", gps_data[13][0], gps_data[13][1]);
Ê91 }
Ê92 }
Ê93
Ê94 void pa1010d_read_raw(char numcommand[]) {
Ê95 uint8_t buffer[MAX_READ];
Ê96
Ê97 int i = 0;
Ê98 bool complete = false;
Ê99
100 i2c_read_blocking(i2c_default, addr, buffer, MAX_READ, false);
101
102 // Convert bytes to characters
103 while (i < MAX_READ && complete == false) {
104 numcommand[i] = buffer[i];
105 // Stop converting at end of message
106 if (buffer[i] == 10 && buffer[i + 1] == 10) {
107 complete = true;
108 }
109 i++;
110 }
111 }
112
113 #endif
114
115 int main() {
116 stdio_init_all();
117 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
118 #warning i2c/mpu6050_i2c example requires a board with I2C pins
119 puts("Default I2C pins were not defined");
120 #else
121
122 char numcommand[MAX_READ];
123
124 // Decide which protocols you would like to retrieve data from
125 char init_command[] = "$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29\r\n";
126
127 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
128 i2c_init(i2c_default, 400 * 1000);
129 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
130 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
131 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
132 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
133
134 // Make the I2C pins available to picotool
135 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
136
Raspberry Pi Pico-series C/C++ SDK
Attaching a PA1010D Mini GPS module via I2C 588

137 printf("Hello, PA1010D! Reading raw data from module...\n");
138
139 pa1010d_write_command(init_command, sizeof(init_command));
140
141 while (1) {
142 // Clear array
143 memset(numcommand, 0, MAX_READ);
144 // Read and re-format
145 pa1010d_read_raw(numcommand);
146 pa1010d_parse_string(numcommand, "GNRMC");
147
148 // Wait for data to refresh
149 sleep_ms(1000);
150
151 // Clear terminal
152 printf("\033[1;1H\033[2J");
153 }
154 #endif
155 }
Bill of Materials
Table 50. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
PA1010D board 1 https://shop.pimoroni.com/products/
pa1010d-gps-breakout
M/M Jumper wires 4 generic part
Attaching a PCF8523 Real Time Clock via I2C
This example code shows how to interface the Raspberry Pi Pico to the PCF8523 Real Time Clock
This example allows you to initialise the current time and date and then displays it every half-second. Additionally it lets
you set an alarm for a particular time and date and raises an alert accordingly. More information about the module is
available at https://learn.adafruit.com/adafruit-pcf8523-real-time-clock.
Wiring information
Wiring up the device requires 4 jumpers, to connect VDD, GND, SDA and SCL. The example here uses I2C port 0, which is
assigned to GPIO 4 (SDA) and 5 (SCL) in software. Power is supplied from the 5V pin.
Raspberry Pi Pico-series C/C++ SDK
Attaching a PCF8523 Real Time Clock via I2C 589

Figure 26. Wiring
Diagram for PCF8523.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/pcf8523_i2c/CMakeLists.txt
Ê1 add_executable(pcf8523_i2c
Ê2 pcf8523_i2c.c
Ê3 )
Ê4
Ê5 # pull in common dependencies and additional i2c hardware support
Ê6 target_link_libraries(pcf8523_i2c pico_stdlib hardware_i2c)
Ê7
Ê8 # create map/bin/hex file etc.
Ê9 pico_add_extra_outputs(pcf8523_i2c)
10
11 # add url via pico_set_program_url
12 example_auto_set_url(pcf8523_i2c)
pcf8523_i2c.c
The example code.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/i2c/pcf8523_i2c/pcf8523_i2c.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2020 Raspberry Pi (Trading) Ltd.
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 */
ÊÊ6
ÊÊ7 #include <stdio.h>
ÊÊ8 #include <string.h>
ÊÊ9 #include "pico/stdlib.h"
Ê10 #include "pico/binary_info.h"
Ê11 #include "hardware/i2c.h"
Ê12
Ê13 /* Example code to talk to a PCF8520 Real Time Clock module
Raspberry Pi Pico-series C/C++ SDK
Attaching a PCF8523 Real Time Clock via I2C 590

Ê14
Ê15 Connections on Raspberry Pi Pico board, other boards may vary.
Ê16
Ê17 GPIO PICO_DEFAULT_I2C_SDA_PIN (On Pico this is 4 (physical pin 6)) -> SDA on PCF8520 board
Ê18 GPIO PICO_DEFAULT_I2C_SCK_PIN (On Pico this is 5 (physical pin 7)) -> SCL on PCF8520 board
Ê19 5V (physical pin 40) -> VCC on PCF8520 board
Ê20 GND (physical pin 38) -> GND on PCF8520 board
Ê21 */
Ê22
Ê23 #ifdef i2c_default
Ê24
Ê25 // By default these devices are on bus address 0x68
Ê26 static int addr = 0x68;
Ê27
Ê28 static void pcf8520_reset() {
Ê29 // Two byte reset. First byte register, second byte data
Ê30 // There are a load more options to set up the device in different ways that could be
Ê added here
Ê31 uint8_t buf[] = {0x00, 0x58};
Ê32 i2c_write_blocking(i2c_default, addr, buf, 2, false);
Ê33 }
Ê34
Ê35 static void pcf820_write_current_time() {
Ê36 // buf[0] is the register to write to
Ê37 // buf[1] is the value that will be written to the register
Ê38 uint8_t buf[2];
Ê39
Ê40 //Write values for the current time in the array
Ê41 //index 0 -> second: bits 4-6 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê42 //index 1 -> minute: bits 4-6 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê43 //index 2 -> hour: bits 4-5 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê44 //index 3 -> day of the month: bits 4-5 are responsible for the ten's digit and bits 0-3
Ê for the unit's digit
Ê45 //index 4 -> day of the week: where Sunday = 0x00, Monday = 0x01, Tuesday... ...Saturday =
Ê 0x06
Ê46 //index 5 -> month: bit 4 is responsible for the ten's digit and bits 0-3 for the unit's
Ê digit
Ê47 //index 6 -> year: bits 4-7 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê48
Ê49 //NOTE: if the value in the year register is a multiple for 4, it will be considered a
Ê leap year and hence will include the 29th of February
Ê50
Ê51 uint8_t current_val[7] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
Ê52
Ê53 for (int i = 3; i < 10; ++i) {
Ê54 buf[0] = i;
Ê55 buf[1] = current_val[i - 3];
Ê56 i2c_write_blocking(i2c_default, addr, buf, 2, false);
Ê57 }
Ê58 }
Ê59
Ê60 static void pcf8520_read_raw(uint8_t *buffer) {
Ê61 // For this particular device, we send the device the register we want to read
Ê62 // first, then subsequently read from the device. The register is auto incrementing
Ê63 // so we don't need to keep sending the register we want, just the first.
Ê64
Ê65 // Start reading acceleration registers from register 0x3B for 6 bytes
Ê66 uint8_t val = 0x03;
Ê67 i2c_write_blocking(i2c_default, addr, &val, 1, true); // true to keep master control of
Ê bus
Raspberry Pi Pico-series C/C++ SDK
Attaching a PCF8523 Real Time Clock via I2C 591

Ê68 i2c_read_blocking(i2c_default, addr, buffer, 7, false);
Ê69 }
Ê70
Ê71
Ê72 void pcf8520_set_alarm() {
Ê73 // buf[0] is the register to write to
Ê74 // buf[1] is the value that will be written to the register
Ê75 uint8_t buf[2];
Ê76
Ê77 // Default value of alarm register is 0x80
Ê78 // Set bit 8 of values to 0 to activate that particular alarm
Ê79 // Index 0 -> minute: bits 4-5 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê80 // Index 1 -> hour: bits 4-6 are responsible for the ten's digit and bits 0-3 for the
Ê unit's digit
Ê81 // Index 2 -> day of the month: bits 4-5 are responsible for the ten's digit and bits 0-3
Ê for the unit's digit
Ê82 // Index 3 -> day of the week: where Sunday = 0x00, Monday = 0x01, Tuesday... ...Saturday
Ê = 0x06
Ê83
Ê84 uint8_t alarm_val[4] = {0x01, 0x80, 0x80, 0x80};
Ê85 // Write alarm values to registers
Ê86 for (int i = 10; i < 14; ++i) {
Ê87 buf[0] = (uint8_t) i;
Ê88 buf[1] = alarm_val[i - 10];
Ê89 i2c_write_blocking(i2c_default, addr, buf, 2, false);
Ê90 }
Ê91 }
Ê92
Ê93 void pcf8520_check_alarm() {
Ê94 // Check bit 3 of control register 2 for alarm flags
Ê95 uint8_t status[1];
Ê96 uint8_t val = 0x01;
Ê97 i2c_write_blocking(i2c_default, addr, &val, 1, true); // true to keep master control of
Ê bus
Ê98 i2c_read_blocking(i2c_default, addr, status, 1, false);
Ê99
100 if ((status[0] & 0x08) == 0x08) {
101 printf("ALARM RINGING");
102 } else {
103 printf("Alarm not triggered yet");
104 }
105 }
106
107
108 void pcf8520_convert_time(int conv_time[7], const uint8_t raw_time[7]) {
109 // Convert raw data into time
110 conv_time[0] = (10 * (int) ((raw_time[0] & 0x70) >> 4)) + ((int) (raw_time[0] & 0x0F));
111 conv_time[1] = (10 * (int) ((raw_time[1] & 0x70) >> 4)) + ((int) (raw_time[1] & 0x0F));
112 conv_time[2] = (10 * (int) ((raw_time[2] & 0x30) >> 4)) + ((int) (raw_time[2] & 0x0F));
113 conv_time[3] = (10 * (int) ((raw_time[3] & 0x30) >> 4)) + ((int) (raw_time[3] & 0x0F));
114 conv_time[4] = (int) (raw_time[4] & 0x07);
115 conv_time[5] = (10 * (int) ((raw_time[5] & 0x10) >> 4)) + ((int) (raw_time[5] & 0x0F));
116 conv_time[6] = (10 * (int) ((raw_time[6] & 0xF0) >> 4)) + ((int) (raw_time[6] & 0x0F));
117 }
118 #endif
119
120 int main() {
121 stdio_init_all();
122 #if !defined(i2c_default) || !defined(PICO_DEFAULT_I2C_SDA_PIN) ||
Ê !defined(PICO_DEFAULT_I2C_SCL_PIN)
123 #warning i2c/pcf8520_i2c example requires a board with I2C pins
124 puts("Default I2C pins were not defined");
125 #else
Raspberry Pi Pico-series C/C++ SDK
Attaching a PCF8523 Real Time Clock via I2C 592

126 printf("Hello, PCF8520! Reading raw data from registers...\n");
127
128 // This example will use I2C0 on the default SDA and SCL pins (4, 5 on a Pico)
129 i2c_init(i2c_default, 400 * 1000);
130 gpio_set_function(PICO_DEFAULT_I2C_SDA_PIN, GPIO_FUNC_I2C);
131 gpio_set_function(PICO_DEFAULT_I2C_SCL_PIN, GPIO_FUNC_I2C);
132 gpio_pull_up(PICO_DEFAULT_I2C_SDA_PIN);
133 gpio_pull_up(PICO_DEFAULT_I2C_SCL_PIN);
134 // Make the I2C pins available to picotool
135 bi_decl(bi_2pins_with_func(PICO_DEFAULT_I2C_SDA_PIN, PICO_DEFAULT_I2C_SCL_PIN,
Ê GPIO_FUNC_I2C));
136
137 pcf8520_reset();
138
139 pcf820_write_current_time();
140 pcf8520_set_alarm();
141 pcf8520_check_alarm();
142
143 uint8_t raw_time[7];
144 int real_time[7];
145 char days_of_week[7][12] = {"Sunday", "Monday", "Tuesday", "Wednesday", "Thursday",
Ê "Friday", "Saturday"};
146
147 while (1) {
148
149 pcf8520_read_raw(raw_time);
150 pcf8520_convert_time(real_time, raw_time);
151
152 printf("Time: %02d : %02d : %02d\n", real_time[2], real_time[1], real_time[0]);
153 printf("Date: %s %02d / %02d / %02d\n", days_of_week[real_time[4]], real_time[3],
Ê real_time[5], real_time[6]);
154 pcf8520_check_alarm();
155
156 sleep_ms(500);
157
158 // Clear terminal
159 printf("\033[1;1H\033[2J");
160 }
161 #endif
162 }
Bill of Materials
Table 51. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
PCF8523 board 1 https://www.adafruit.com/product/
3295
M/M Jumper wires 4 generic part
Interfacing 1-Wire devices to the Pico
This example demonstrates how to use 1-Wire devices with the Raspberry Pi Pico (RP2040). 1-Wire is an interface that
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 593

enables a master to control several slave devices over a simple shared serial bus.
The example provides a 1-Wire library that is used to take readings from a set of connected DS18B20 1-Wire
temperature sensors. The results are sent to the default serial terminal connected via USB or UART as configured in the
SDK.
The library uses a driver based on the RP2040 PIO state machine to generate accurate bus timings and control the 1-
Wire bus via a GPIO pin.
1-Wire® is a registered trademark of Maxim Integrated Products, Inc.
Wiring information
Connect one or more DS18B20 sensors to the Pico as shown in the diagram and table below.
Connect GPIO 15 to 3V3(OUT) with a pull-up resistor of about 4k ohms.
Figure 27. Wiring
diagram
Table 52. Connections
table
Pico pin DS18B20 pin / sensor wire
GND 38 or equivalent GND 1 / Black
GPIO 15 20 DQ 2 / Yellow
3V3(OUT) 36 VDD 3 / Red
Bill of materials
Table 53. A list of
materials for the
example circuit
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 1 https://www.raspberrypi.com/
products/raspberry-pi-pico/
DS18B20 3 chip or wired sensor
3900 ohm resistor 1 generic part
M/M jumper wire 13 generic part
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 594

List of files
CMakeLists.txt
CMake file to incorporate the example in the build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/CMakeLists.txt
Ê1 add_executable(pio_onewire)
Ê2
Ê3 target_sources(pio_onewire PRIVATE onewire.c)
Ê4
Ê5 add_subdirectory(onewire_library)
Ê6
Ê7 target_link_libraries(pio_onewire PRIVATE
Ê8 pico_stdlib
Ê9 hardware_pio
10 onewire_library)
11
12 pico_add_extra_outputs(pio_onewire)
13
14 # add url via pico_set_program_url
15 example_auto_set_url(pio_onewire)
onewire.c
Source code for the example program.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/onewire.c
Ê1 /**
Ê2 * Copyright (c) 2023 mjcross
Ê3 *
Ê4 * SPDX-License-Identifier: BSD-3-Clause
Ê5 **/
Ê6
Ê7 #include <stdio.h>
Ê8 #include "pico/stdlib.h"
Ê9 #include "pico/binary_info.h"
10
11 #include "onewire_library.h" // onewire library functions
12 #include "ow_rom.h" // onewire ROM command codes
13 #include "ds18b20.h" // ds18b20 function codes
14
15 // Demonstrates the PIO onewire driver by taking readings from a set of
16 // ds18b20 1-wire temperature sensors.
17
18 int main() {
19 stdio_init_all();
20
21 PIO pio = pio0;
22 uint gpio = 15;
23
24 OW ow;
25 uint offset;
26 // add the program to the PIO shared address space
27 if (pio_can_add_program (pio, &onewire_program)) {
28 offset = pio_add_program (pio, &onewire_program);
29
30 // claim a state machine and initialise a driver instance
31 if (ow_init (&ow, pio, offset, gpio)) {
32
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 595

33 // find and display 64-bit device addresses
34 int maxdevs = 10;
35 uint64_t romcode[maxdevs];
36 int num_devs = ow_romsearch (&ow, romcode, maxdevs, OW_SEARCH_ROM);
37
38 printf("Found %d devices\n", num_devs);
39 for (int i = 0; i < num_devs; i += 1) {
40 printf("\t%d: 0x%llx\n", i, romcode[i]);
41 }
42 putchar ('\n');
43
44 while (num_devs > 0) {
45 // start temperature conversion in parallel on all devices
46 // (see ds18b20 datasheet)
47 ow_reset (&ow);
48 ow_send (&ow, OW_SKIP_ROM);
49 ow_send (&ow, DS18B20_CONVERT_T);
50
51 // wait for the conversions to finish
52 while (ow_read(&ow) == 0);
53
54 // read the result from each device
55 for (int i = 0; i < num_devs; i += 1) {
56 ow_reset (&ow);
57 ow_send (&ow, OW_MATCH_ROM);
58 for (int b = 0; b < 64; b += 8) {
59 ow_send (&ow, romcode[i] >> b);
60 }
61 ow_send (&ow, DS18B20_READ_SCRATCHPAD);
62 int16_t temp = 0;
63 temp = ow_read (&ow) | (ow_read (&ow) << 8);
64 printf ("\t%d: %f", i, temp / 16.0);
65 }
66 putchar ('\n');
67 }
68
69 } else {
70 puts ("could not initialise the driver");
71 }
72 } else {
73 puts ("could not add the program");
74 }
75
76 while(true);
77 }
ow_rom.h
Header file with generic ROM command codes for 1-Wire devices.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/ow_rom.h
1 // Generic ROM commands for 1-Wire devices
2 // https://www.analog.com/en/technical-articles/guide-to-1wire-communication.html
3 //
4 #define OW_READ_ROM 0x33
5 #define OW_MATCH_ROM 0x55
6 #define OW_SKIP_ROM 0xCC
7 #define OW_ALARM_SEARCH 0xEC
8 #define OW_SEARCH_ROM 0xF0
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 596

ds18b20.h
Header file with function command codes for the DS18B20 device.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/ds18b20.h
1 // Function commands for d218b20 1-Wire temperature sensor
2 // https://www.analog.com/en/products/ds18b20.html
3 //
4 #define DS18B20_CONVERT_T 0x44
5 #define DS18B20_WRITE_SCRATCHPAD 0x4e
6 #define DS18B20_READ_SCRATCHPAD 0xbe
7 #define DS18B20_COPY_SCRATCHPAD 0x48
8 #define DS18B20_RECALL_EE 0xb8
9 #define DS18B20_READ_POWER_SUPPLY 0xb4
onewire_library/
Subdirectory containing the 1-Wire library and driver.
onewire_library/CMakeLists.txt
CMake file to build the 1-Wire library and driver.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/onewire_library/CMakeLists.txt
Ê1 add_library(onewire_library INTERFACE)
Ê2 target_sources(onewire_library INTERFACE ${CMAKE_CURRENT_SOURCE_DIR}/onewire_library.c)
Ê3
Ê4 # invoke pio_asm to assemble the state machine programs
Ê5 #
Ê6 pico_generate_pio_header(onewire_library ${CMAKE_CURRENT_LIST_DIR}/onewire_library.pio)
Ê7
Ê8 target_link_libraries(onewire_library INTERFACE
Ê9 pico_stdlib
10 hardware_pio
11 )
12
13 # add the `binary` directory so that the generated headers are included in the project
14 #
15 target_include_directories(onewire_library INTERFACE
16 ${CMAKE_CURRENT_SOURCE_DIR}
17 ${CMAKE_CURRENT_BINARY_DIR}
18 )
onewire_library/onewire_library.c
Source code for the 1-Wire user functions.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/onewire_library/onewire_library.c
ÊÊ1 /**
ÊÊ2 * Copyright (c) 2023 mjcross
ÊÊ3 *
ÊÊ4 * SPDX-License-Identifier: BSD-3-Clause
ÊÊ5 **/
ÊÊ6
ÊÊ7 #include "pico/stdlib.h"
ÊÊ8 #include "hardware/gpio.h"
ÊÊ9 #include "hardware/pio.h"
Ê10
Ê11 #include "onewire_library.h"
Ê12
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 597

Ê13
Ê14 // Create a driver instance and populate the provided OW structure.
Ê15 // Returns: True on success.
Ê16 // ow: A pointer to a blank OW structure to hold the driver parameters.
Ê17 // pio: The PIO hardware instance to use.
Ê18 // offset: The location of the onewire program in the PIO shared address space.
Ê19 // gpio: The pin to use for the bus (NB: see the README).
Ê20 bool ow_init (OW *ow, PIO pio, uint offset, uint gpio) {
Ê21 int sm = pio_claim_unused_sm (pio, false);
Ê22 if (sm == -1) {
Ê23 return false;
Ê24 }
Ê25 gpio_init (gpio); // enable the gpio and clear any output value
Ê26 pio_gpio_init (pio, gpio); // set the function to PIO output
Ê27 ow->gpio = gpio;
Ê28 ow->pio = pio;
Ê29 ow->offset = offset;
Ê30 ow->sm = (uint)sm;
Ê31 ow->jmp_reset = onewire_reset_instr (ow->offset); // assemble the bus reset instruction
Ê32 onewire_sm_init (ow->pio, ow->sm, ow->offset, ow->gpio, 8); // set 8 bits per word
Ê33 return true;
Ê34 }
Ê35
Ê36
Ê37 // Send a binary word on the bus (LSB first).
Ê38 // ow: A pointer to an OW driver struct.
Ê39 // data: The word to be sent.
Ê40 void ow_send (OW *ow, uint data) {
Ê41 pio_sm_put_blocking (ow->pio, ow->sm, (uint32_t)data);
Ê42 pio_sm_get_blocking (ow->pio, ow->sm); // discard the response
Ê43 }
Ê44
Ê45
Ê46 // Read a binary word from the bus.
Ê47 // Returns: the word read (LSB first).
Ê48 // ow: pointer to an OW driver struct
Ê49 uint8_t ow_read (OW *ow) {
Ê50 pio_sm_put_blocking (ow->pio, ow->sm, 0xff); // generate read slots
Ê51 return (uint8_t)(pio_sm_get_blocking (ow->pio, ow->sm) >> 24); // shift response into
Ê bits 0..7
Ê52 }
Ê53
Ê54
Ê55 // Reset the bus and detect any connected slaves.
Ê56 // Returns: true if any slaves responded.
Ê57 // ow: pointer to an OW driver struct
Ê58 bool ow_reset (OW *ow) {
Ê59 pio_sm_exec_wait_blocking (ow->pio, ow->sm, ow->jmp_reset);
Ê60 if ((pio_sm_get_blocking (ow->pio, ow->sm) & 1) == 0) { // apply pin mask (see pio
Ê program)
Ê61 return true; // a slave pulled the bus low
Ê62 }
Ê63 return false;
Ê64 }
Ê65
Ê66
Ê67 // Find ROM codes (64-bit hardware addresses) of all connected devices.
Ê68 // See https://www.analog.com/en/app-notes/1wire-search-algorithm.html
Ê69 // Returns: the number of devices found (up to maxdevs) or -1 if an error occurrred.
Ê70 // ow: pointer to an OW driver struct
Ê71 // romcodes: location at which store the addresses (NULL means don't store)
Ê72 // maxdevs: maximum number of devices to find (0 means no limit)
Ê73 // command: 1-Wire search command (e.g. OW_SEARCHROM or OW_ALARM_SEARCH)
Ê74 int ow_romsearch (OW *ow, uint64_t *romcodes, int maxdevs, uint command) {
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 598

Ê75 int index;
Ê76 uint64_t romcode = 0ull;
Ê77 int branch_point;
Ê78 int next_branch_point = -1;
Ê79 int num_found = 0;
Ê80 bool finished = false;
Ê81
Ê82 onewire_sm_init (ow->pio, ow->sm, ow->offset, ow->gpio, 1); // set driver to 1-bit mode
Ê83
Ê84 while (finished == false && (maxdevs == 0 || num_found < maxdevs )) {
Ê85 finished = true;
Ê86 branch_point = next_branch_point;
Ê87 if (ow_reset (ow) == false) {
Ê88 num_found = 0; // no slaves present
Ê89 finished = true;
Ê90 break;
Ê91 }
Ê92 for (int i = 0; i < 8; i += 1) { // send search command as single bits
Ê93 ow_send (ow, command >> i);
Ê94 }
Ê95 for (index = 0; index < 64; index += 1) { // determine romcode bits 0..63 (see ref)
Ê96 uint a = ow_read (ow);
Ê97 uint b = ow_read (ow);
Ê98 if (a == 0 && b == 0) { // (a, b) = (0, 0)
Ê99 if (index == branch_point) {
100 ow_send (ow, 1);
101 romcode |= (1ull << index);
102 } else {
103 if (index > branch_point || (romcode & (1ull << index)) == 0) {
104 ow_send(ow, 0);
105 finished = false;
106 romcode &= ~(1ull << index);
107 next_branch_point = index;
108 } else { // index < branch_point or romcode[index] = 1
109 ow_send (ow, 1);
110 }
111 }
112 } else if (a != 0 && b != 0) { // (a, b) = (1, 1) error (e.g. device
Ê disconnected)
113 num_found = -2; // function will return -1
114 finished = true;
115 break; // terminate for loop
116 } else {
117 if (a == 0) { // (a, b) = (0, 1) or (1, 0)
118 ow_send (ow, 0);
119 romcode &= ~(1ull << index);
120 } else {
121 ow_send (ow, 1);
122 romcode |= (1ull << index);
123 }
124 }
125 } // end of for loop
126
127 if (romcodes != NULL) {
128 romcodes[num_found] = romcode; // store the romcode
129 }
130 num_found += 1;
131 } // end of while loop
132
133 onewire_sm_init (ow->pio, ow->sm, ow->offset, ow->gpio, 8); // restore 8-bit mode
134 return num_found;
135 }
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 599

onewire_library/onewire_library.h
Header file for the 1-Wire user functions and types.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/onewire_library/onewire_library.h
Ê1 #include "hardware/pio.h"
Ê2 #include "hardware/clocks.h" // for clock_get_hz() in generated header
Ê3 #include "onewire_library.pio.h" // generated by pioasm
Ê4
Ê5 typedef struct {
Ê6 PIO pio;
Ê7 uint sm;
Ê8 uint jmp_reset;
Ê9 int offset;
10 int gpio;
11 } OW;
12
13 bool ow_init (OW *ow, PIO pio, uint offset, uint gpio);
14 void ow_send (OW *ow, uint data);
15 uint8_t ow_read (OW *ow);
16 bool ow_reset (OW *ow);
17 int ow_romsearch (OW *ow, uint64_t *romcodes, int maxdevs, uint command);
onewire_library/onewire_library.pio
PIO assembly code for the 1-Wire driver.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/pio/onewire/onewire_library/onewire_library.pio
Ê1 ;
Ê2 ; Copyright (c) 2023 mjcross
Ê3 ;
Ê4 ; SPDX-License-Identifier: BSD-3-Clause
Ê5 ;
Ê6
Ê7 ; Implements a Maxim 1-Wire bus with a GPIO pin.
Ê8 ;
Ê9 ; Place data words to be transmitted in the TX FIFO and read the results from the
10 ; RX FIFO. To reset the bus execute a jump to 'reset_bus' using the opcode from
11 ; the provided function.
12 ;
13 ; At 1us per cycle as initialised below the timings are those recommended by:
14 ; https://www.analog.com/en/technical-articles/1wire-communication-through-software.html
15 ;
16 ; Notes:
17 ; (1) The code will stall with the bus in a safe state if the FIFOs are empty/full.
18 ; (2) The bus must be pulled up with an external pull-up resistor of about 4k.
19 ; The internal GPIO resistors are too high (~50k) to work reliably for this.
20 ; (3) Do not connect the GPIO pin directly to a bus powered at more than 3.3V.
21
22 .program onewire
23 .side_set 1 pindirs
24
25 PUBLIC reset_bus:
26 set x, 28 side 1 [15] ; pull bus low 16
27 loop_a: jmp x-- loop_a side 1 [15] ; 29 x 16
28 set x, 8 side 0 [6] ; release bus 7
29 loop_b: jmp x-- loop_b side 0 [6] ; 9 x 7
30
31 mov isr, pins side 0 ; read all pins to ISR (avoids autopush) 1
32 push side 0 ; push result manually 1
33 set x, 24 side 0 [7] ; 8
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 600

34 loop_c: jmp x-- loop_c side 0 [15] ; 25 x 16
35
36 .wrap_target
37 PUBLIC fetch_bit:
38 out x, 1 side 0 ; shift next bit from OSR (autopull) 1
39 jmp !x send_0 side 1 [5] ; pull bus low, branch if sending '0' 6
40
41 send_1: ; send a '1' bit
42 set x, 2 side 0 [8] ; release bus, wait for slave response 9
43 in pins, 1 side 0 [4] ; read bus, shift bit to ISR (autopush) 5
44 loop_e: jmp x-- loop_e side 0 [15] ; 3 x 16
45 jmp fetch_bit side 0 ; 1
46
47 send_0: ; send a '0' bit
48 set x, 2 side 1 [5] ; continue pulling bus low 6
49 loop_d: jmp x-- loop_d side 1 [15] ; 3 x 16
50 in null, 1 side 0 [8] ; release bus, shift 0 to ISR (autopush) 9
51 .wrap
52 ;; (17 instructions)
53
54
55 % c-sdk {
56 static inline void onewire_sm_init (PIO pio, uint sm, uint offset, uint pin_num, uint
Ê bits_per_word) {
57
58 // create a new state machine configuration
59 pio_sm_config c = onewire_program_get_default_config (offset);
60
61 // Input Shift Register configuration settings
62 sm_config_set_in_shift (
63 &c,
64 true, // shift direction: right
65 true, // autopush: enabled
66 bits_per_word // autopush threshold
67 );
68
69 // Output Shift Register configuration settings
70 sm_config_set_out_shift (
71 &c,
72 true, // shift direction: right
73 true, // autopull: enabled
74 bits_per_word // autopull threshold
75 );
76
77 // configure the input and sideset pin groups to start at `pin_num`
78 sm_config_set_in_pins (&c, pin_num);
79 sm_config_set_sideset_pins (&c, pin_num);
80
81 // configure the clock divider for 1 usec per instruction
82 float div = clock_get_hz (clk_sys) * 1e-6;
83 sm_config_set_clkdiv (&c, div);
84
85 // apply the configuration and initialise the program counter
86 pio_sm_init (pio, sm, offset + onewire_offset_fetch_bit, &c);
87
88 // enable the state machine
89 pio_sm_set_enabled (pio, sm, true);
90 }
91
92 static inline uint onewire_reset_instr (uint offset) {
93 // encode a "jmp reset_bus side 0" instruction for the state machine
94 return pio_encode_jmp (offset + onewire_offset_reset_bus) | pio_encode_sideset (1, 0);
95 }
Raspberry Pi Pico-series C/C++ SDK
Interfacing 1-Wire devices to the Pico 601

96 %}
Communicating as master and slave via SPI
This example code shows how to interface two RP2040 microcontrollers to each other using SPI.
Wiring information
Function Master (RP2040) Slave (RP2040) Master (Pico) Slave (Pico)
MOSI DO0 DI0 25 21
SCLK SCK0 SCK0 24 24
GND GND GND 23 23
CS CS0 CS0 22 22
MISO DI0 DO0 21 25
Figure 28. Wiring
Diagram for SPI
Master and Slave.
At least one of the boards should be powered, and will share power to the other.
If the master is not connected properly to a slave, the master will report reading all zeroes.
If the slave is not connected properly to a master, it will initialize but never transmit nor receive, because it’s waiting for
clock signal from the master.
Outputs
Both master and slave boards will give output to stdio.
With master and slave properly connected, the master should output something like this:
SPI master example
SPI master says: The following buffer will be written to MOSI endlessly:
00 01 02 03 04 05 06 07 08 09 0a 0b 0c 0d 0e 0f
10 11 12 13 14 15 16 17 18 19 1a 1b 1c 1d 1e 1f
20 21 22 23 24 25 26 27 28 29 2a 2b 2c 2d 2e 2f
30 31 32 33 34 35 36 37 38 39 3a 3b 3c 3d 3e 3f
40 41 42 43 44 45 46 47 48 49 4a 4b 4c 4d 4e 4f
50 51 52 53 54 55 56 57 58 59 5a 5b 5c 5d 5e 5f
60 61 62 63 64 65 66 67 68 69 6a 6b 6c 6d 6e 6f
70 71 72 73 74 75 76 77 78 79 7a 7b 7c 7d 7e 7f
80 81 82 83 84 85 86 87 88 89 8a 8b 8c 8d 8e 8f
90 91 92 93 94 95 96 97 98 99 9a 9b 9c 9d 9e 9f
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 602

a0 a1 a2 a3 a4 a5 a6 a7 a8 a9 aa ab ac ad ae af
b0 b1 b2 b3 b4 b5 b6 b7 b8 b9 ba bb bc bd be bf
c0 c1 c2 c3 c4 c5 c6 c7 c8 c9 ca cb cc cd ce cf
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9 da db dc dd de df
e0 e1 e2 e3 e4 e5 e6 e7 e8 e9 ea eb ec ed ee ef
f0 f1 f2 f3 f4 f5 f6 f7 f8 f9 fa fb fc fd fe ff
SPI master says: read page 0 from the MISO line:
ff fe fd fc fb fa f9 f8 f7 f6 f5 f4 f3 f2 f1 f0
ef ee ed ec eb ea e9 e8 e7 e6 e5 e4 e3 e2 e1 e0
df de dd dc db da d9 d8 d7 d6 d5 d4 d3 d2 d1 d0
cf ce cd cc cb ca c9 c8 c7 c6 c5 c4 c3 c2 c1 c0
bf be bd bc bb ba b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
af ae ad ac ab aa a9 a8 a7 a6 a5 a4 a3 a2 a1 a0
9f 9e 9d 9c 9b 9a 99 98 97 96 95 94 93 92 91 90
8f 8e 8d 8c 8b 8a 89 88 87 86 85 84 83 82 81 80
7f 7e 7d 7c 7b 7a 79 78 77 76 75 74 73 72 71 70
6f 6e 6d 6c 6b 6a 69 68 67 66 65 64 63 62 61 60
5f 5e 5d 5c 5b 5a 59 58 57 56 55 54 53 52 51 50
4f 4e 4d 4c 4b 4a 49 48 47 46 45 44 43 42 41 40
3f 3e 3d 3c 3b 3a 39 38 37 36 35 34 33 32 31 30
2f 2e 2d 2c 2b 2a 29 28 27 26 25 24 23 22 21 20
1f 1e 1d 1c 1b 1a 19 18 17 16 15 14 13 12 11 10
0f 0e 0d 0c 0b 0a 09 08 07 06 05 04 03 02 01 00
The slave should output something like this:
SPI slave example
SPI slave says: When reading from MOSI, the following buffer will be written to MISO:
ff fe fd fc fb fa f9 f8 f7 f6 f5 f4 f3 f2 f1 f0
ef ee ed ec eb ea e9 e8 e7 e6 e5 e4 e3 e2 e1 e0
df de dd dc db da d9 d8 d7 d6 d5 d4 d3 d2 d1 d0
cf ce cd cc cb ca c9 c8 c7 c6 c5 c4 c3 c2 c1 c0
bf be bd bc bb ba b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
af ae ad ac ab aa a9 a8 a7 a6 a5 a4 a3 a2 a1 a0
9f 9e 9d 9c 9b 9a 99 98 97 96 95 94 93 92 91 90
8f 8e 8d 8c 8b 8a 89 88 87 86 85 84 83 82 81 80
7f 7e 7d 7c 7b 7a 79 78 77 76 75 74 73 72 71 70
6f 6e 6d 6c 6b 6a 69 68 67 66 65 64 63 62 61 60
5f 5e 5d 5c 5b 5a 59 58 57 56 55 54 53 52 51 50
4f 4e 4d 4c 4b 4a 49 48 47 46 45 44 43 42 41 40
3f 3e 3d 3c 3b 3a 39 38 37 36 35 34 33 32 31 30
2f 2e 2d 2c 2b 2a 29 28 27 26 25 24 23 22 21 20
1f 1e 1d 1c 1b 1a 19 18 17 16 15 14 13 12 11 10
0f 0e 0d 0c 0b 0a 09 08 07 06 05 04 03 02 01 00
SPI slave says: read page 0 from the MOSI line:
00 01 02 03 04 05 06 07 08 09 0a 0b 0c 0d 0e 0f
10 11 12 13 14 15 16 17 18 19 1a 1b 1c 1d 1e 1f
20 21 22 23 24 25 26 27 28 29 2a 2b 2c 2d 2e 2f
30 31 32 33 34 35 36 37 38 39 3a 3b 3c 3d 3e 3f
40 41 42 43 44 45 46 47 48 49 4a 4b 4c 4d 4e 4f
50 51 52 53 54 55 56 57 58 59 5a 5b 5c 5d 5e 5f
60 61 62 63 64 65 66 67 68 69 6a 6b 6c 6d 6e 6f
70 71 72 73 74 75 76 77 78 79 7a 7b 7c 7d 7e 7f
80 81 82 83 84 85 86 87 88 89 8a 8b 8c 8d 8e 8f
90 91 92 93 94 95 96 97 98 99 9a 9b 9c 9d 9e 9f
a0 a1 a2 a3 a4 a5 a6 a7 a8 a9 aa ab ac ad ae af
b0 b1 b2 b3 b4 b5 b6 b7 b8 b9 ba bb bc bd be bf
c0 c1 c2 c3 c4 c5 c6 c7 c8 c9 ca cb cc cd ce cf
d0 d1 d2 d3 d4 d5 d6 d7 d8 d9 da db dc dd de df
e0 e1 e2 e3 e4 e5 e6 e7 e8 e9 ea eb ec ed ee ef
f0 f1 f2 f3 f4 f5 f6 f7 f8 f9 fa fb fc fd fe ff
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 603

If you look at the communication with a logic analyzer, you should see this:
Figure 29. Data
capture as seen in
Saleae Logic.
List of Files
CMakeLists.txt
CMake file to incorporate the example in to the examples build tree.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/spi_master_slave/CMakeLists.txt
1 add_subdirectory_exclude_platforms(spi_master)
2 add_subdirectory_exclude_platforms(spi_slave)
spi_master/spi_master.c
The example code for SPI master.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/spi_master_slave/spi_master/spi_master.c
Ê1 // Copyright (c) 2021 Michael Stoops. All rights reserved.
Ê2 // Portions copyright (c) 2021 Raspberry Pi (Trading) Ltd.
Ê3 //
Ê4 // Redistribution and use in source and binary forms, with or without modification, are
Ê permitted provided that the
Ê5 // following conditions are met:
Ê6 //
Ê7 // 1. Redistributions of source code must retain the above copyright notice, this list of
Ê conditions and the following
Ê8 // disclaimer.
Ê9 // 2. Redistributions in binary form must reproduce the above copyright notice, this list of
Ê conditions and the
10 // following disclaimer in the documentation and/or other materials provided with the
Ê distribution.
11 // 3. Neither the name of the copyright holder nor the names of its contributors may be used to
Ê endorse or promote
12 // products derived from this software without specific prior written permission.
13 //
14 // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS
Ê OR IMPLIED WARRANTIES,
15 // INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A
Ê PARTICULAR PURPOSE ARE
16 // DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT,
Ê INDIRECT, INCIDENTAL,
17 // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
Ê SUBSTITUTE GOODS OR
18 // SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
Ê THEORY OF LIABILITY,
19 // WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 604

Ê IN ANY WAY OUT OF THE
20 // USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
21 //
22 // SPDX-License-Identifier: BSD-3-Clause
23 //
24 // Example of an SPI bus master using the PL022 SPI interface
25
26 #include <stdio.h>
27 #include "pico/stdlib.h"
28 #include "pico/binary_info.h"
29 #include "hardware/spi.h"
30
31 #define BUF_LEN 0x100
32
33 void printbuf(uint8_t buf[], size_t len) {
34 size_t i;
35 for (i = 0; i < len; ++i) {
36 if (i % 16 == 15)
37 printf("%02x\n", buf[i]);
38 else
39 printf("%02x ", buf[i]);
40 }
41
42 // append trailing newline if there isn't one
43 if (i % 16) {
44 putchar('\n');
45 }
46 }
47
48 int main() {
49 // Enable UART so we can print
50 stdio_init_all();
51 #if !defined(spi_default) || !defined(PICO_DEFAULT_SPI_SCK_PIN) ||
!defined(PICO_DEFAULT_SPI_TX_PIN) || !defined(PICO_DEFAULT_SPI_RX_PIN) ||
!defined(PICO_DEFAULT_SPI_CSN_PIN)
52 #warning spi/spi_master example requires a board with SPI pins
53 puts("Default SPI pins were not defined");
54 #else
55
56 printf("SPI master example\n");
57
58 // Enable SPI 0 at 1 MHz and connect to GPIOs
59 spi_init(spi_default, 1000 * 1000);
60 gpio_set_function(PICO_DEFAULT_SPI_RX_PIN, GPIO_FUNC_SPI);
61 gpio_set_function(PICO_DEFAULT_SPI_SCK_PIN, GPIO_FUNC_SPI);
62 gpio_set_function(PICO_DEFAULT_SPI_TX_PIN, GPIO_FUNC_SPI);
63 gpio_set_function(PICO_DEFAULT_SPI_CSN_PIN, GPIO_FUNC_SPI);
64 // Make the SPI pins available to picotool
65 bi_decl(bi_4pins_with_func(PICO_DEFAULT_SPI_RX_PIN, PICO_DEFAULT_SPI_TX_PIN,
PICO_DEFAULT_SPI_SCK_PIN, PICO_DEFAULT_SPI_CSN_PIN, GPIO_FUNC_SPI));
66
67 uint8_t out_buf[BUF_LEN], in_buf[BUF_LEN];
68
69 // Initialize output buffer
70 for (size_t i = 0; i < BUF_LEN; ++i) {
71 out_buf[i] = i;
72 }
73
74 printf("SPI master says: The following buffer will be written to MOSI endlessly:\n");
75 printbuf(out_buf, BUF_LEN);
76
77 for (size_t i = 0; ; ++i) {
78 // Write the output buffer to MOSI, and at the same time read from MISO.
79 spi_write_read_blocking(spi_default, out_buf, in_buf, BUF_LEN);
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 605

80
81 // Write to stdio whatever came in on the MISO line.
82 printf("SPI master says: read page %d from the MISO line:\n", i);
83 printbuf(in_buf, BUF_LEN);
84
85 // Sleep for ten seconds so you get a chance to read the output.
86 sleep_ms(10 * 1000);
87 }
88 #endif
89 }
spi_slave/spi_slave.c
The example code for SPI slave.
Pico Examples: https://github.com/raspberrypi/pico-examples/blob/develop/spi/spi_master_slave/spi_slave/spi_slave.c
Ê1 // Copyright (c) 2021 Michael Stoops. All rights reserved.
Ê2 // Portions copyright (c) 2021 Raspberry Pi (Trading) Ltd.
Ê3 //
Ê4 // Redistribution and use in source and binary forms, with or without modification, are
Ê permitted provided that the
Ê5 // following conditions are met:
Ê6 //
Ê7 // 1. Redistributions of source code must retain the above copyright notice, this list of
Ê conditions and the following
Ê8 // disclaimer.
Ê9 // 2. Redistributions in binary form must reproduce the above copyright notice, this list of
Ê conditions and the
10 // following disclaimer in the documentation and/or other materials provided with the
Ê distribution.
11 // 3. Neither the name of the copyright holder nor the names of its contributors may be used to
Ê endorse or promote
12 // products derived from this software without specific prior written permission.
13 //
14 // THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS
Ê OR IMPLIED WARRANTIES,
15 // INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A
Ê PARTICULAR PURPOSE ARE
16 // DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT,
Ê INDIRECT, INCIDENTAL,
17 // SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
Ê SUBSTITUTE GOODS OR
18 // SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
Ê THEORY OF LIABILITY,
19 // WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING
Ê IN ANY WAY OUT OF THE
20 // USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
21 //
22 // SPDX-License-Identifier: BSD-3-Clause
23 //
24 // Example of an SPI bus slave using the PL022 SPI interface
25
26 #include <stdio.h>
27 #include <string.h>
28 #include "pico/stdlib.h"
29 #include "pico/binary_info.h"
30 #include "hardware/spi.h"
31
32 #define BUF_LEN 0x100
33
34 void printbuf(uint8_t buf[], size_t len) {
35 size_t i;
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 606

36 for (i = 0; i < len; ++i) {
37 if (i % 16 == 15)
38 printf("%02x\n", buf[i]);
39 else
40 printf("%02x ", buf[i]);
41 }
42
43 // append trailing newline if there isn't one
44 if (i % 16) {
45 putchar('\n');
46 }
47 }
48
49
50 int main() {
51 // Enable UART so we can print
52 stdio_init_all();
53 #if !defined(spi_default) || !defined(PICO_DEFAULT_SPI_SCK_PIN) ||
Ê !defined(PICO_DEFAULT_SPI_TX_PIN) || !defined(PICO_DEFAULT_SPI_RX_PIN) ||
Ê !defined(PICO_DEFAULT_SPI_CSN_PIN)
54 #warning spi/spi_slave example requires a board with SPI pins
55 puts("Default SPI pins were not defined");
56 #else
57
58 printf("SPI slave example\n");
59
60 // Enable SPI 0 at 1 MHz and connect to GPIOs
61 spi_init(spi_default, 1000 * 1000);
62 spi_set_slave(spi_default, true);
63 gpio_set_function(PICO_DEFAULT_SPI_RX_PIN, GPIO_FUNC_SPI);
64 gpio_set_function(PICO_DEFAULT_SPI_SCK_PIN, GPIO_FUNC_SPI);
65 gpio_set_function(PICO_DEFAULT_SPI_TX_PIN, GPIO_FUNC_SPI);
66 gpio_set_function(PICO_DEFAULT_SPI_CSN_PIN, GPIO_FUNC_SPI);
67 // Make the SPI pins available to picotool
68 bi_decl(bi_4pins_with_func(PICO_DEFAULT_SPI_RX_PIN, PICO_DEFAULT_SPI_TX_PIN,
Ê PICO_DEFAULT_SPI_SCK_PIN, PICO_DEFAULT_SPI_CSN_PIN, GPIO_FUNC_SPI));
69
70 uint8_t out_buf[BUF_LEN], in_buf[BUF_LEN];
71
72 // Initialize output buffer
73 for (size_t i = 0; i < BUF_LEN; ++i) {
74 // bit-inverted from i. The values should be: {0xff, 0xfe, 0xfd...}
75 out_buf[i] = ~i;
76 }
77
78 printf("SPI slave says: When reading from MOSI, the following buffer will be written to
Ê MISO:\n");
79 printbuf(out_buf, BUF_LEN);
80
81 for (size_t i = 0; ; ++i) {
82 // Write the output buffer to MISO, and at the same time read from MOSI.
83 spi_write_read_blocking(spi_default, out_buf, in_buf, BUF_LEN);
84
85 // Write to stdio whatever came in on the MOSI line.
86 printf("SPI slave says: read page %d from the MOSI line:\n", i);
87 printbuf(in_buf, BUF_LEN);
88 }
89 #endif
90 }
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 607

Bill of Materials
Table 54. A list of
materials required for
the example
Item Quantity Details
Breadboard 1 generic part
Raspberry Pi Pico 2 https://www.raspberrypi.com/
products/raspberry-pi-pico/
M/M Jumper wires 8 generic part
Raspberry Pi Pico-series C/C++ SDK
Communicating as master and slave via SPI 608

Appendix B: Building the SDK API
documentation
The SDK documentation can be viewed online, but is also part of the SDK itself and can be built directly from the
command line. If you haven’t already checked out the SDK repository you should do so,
$ cd ~/
$ mkdir pico
$ cd pico
$ git clone https://github.com/raspberrypi/pico-sdk.git --branch master
$ cd pico-sdk
$ git submodule update --init
$ cd ..
$ git clone https://github.com/raspberrypi/pico-examples.git --branch master
Install doxygen if you don’t already have it,
$ sudo apt install doxygen
Then afterwards you can go ahead and build the documentation for all platforms:
$ cd pico-sdk
$ mkdir build
$ cd build
$ cmake -DPICO_EXAMPLES_PATH=../../pico-examples -DPICO_PLATFORM=combined-docs ..
$ make docs
The API documentation will be built and can be found in the pico-sdk/build/docs/doxygen/html directory, see Figure 30.
TIP
If you prefer to build documentation for a single platform only, then replace -DPICO_PLATFORM=combined-docs with
-DPICO_PLATFORM=rp2040 or -DPICO_PLATFORM=rp2350 in the above, using a fresh build directory.
Raspberry Pi Pico-series C/C++ SDK
Appendix B: Building the SDK API documentation 609

Figure 30. The SDK
API documentation
Raspberry Pi Pico-series C/C++ SDK
Appendix B: Building the SDK API documentation 610

Appendix C: SDK release history
Release 1.0.0 (20/Jan/2021)
Initial release
Release 1.0.1 (01/Feb/2021)
•
add pico_get_unique_id method to return a unique identifier for a Pico board using the identifier of the external flash
•
exposed all 4 pacing timers on the DMA peripheral (previously only 2 were exposed)
•
fixed ninja build (i.e. cmake -G ninja .. ; ninja)
•
minor other improvements and bug fixes
Boot Stage 2
Additionally, a low level change was made to the way flash binaries start executing after boot_stage2. This was at the
request of folks implementing other language runtimes. It is not generally of concern to end users, however it did
require a change to the linker scripts so if you have cloned those to make modifications then you need to port across
the relevant changes. If you are porting a different language runtime using the SDK boot_stage2 implementations then
you should be aware that you should now have a vector table (rather than executable code) - at 0x10000100.
Release 1.1.0 (05/Mar/2021)
•
Added board headers for Adafruit, Pimoroni & SparkFun boards
◦
new values for PICO_BOARD are adafruit_feather_rp2040, adafruit_itsybitsy_rp2040, adafruit_qtpy_rp2040,
pimoroni_keybow2040, pimoroni_picosystem, pimoroni_tiny2040, sparkfun_micromod, sparkfun_promicro,
sparkfun_thingplus, in addition to the existing pico and vgaboard.
◦
Added additional definitions for a default SPI, I2C pins as well as the existing ones for UART
◦
Allow default pins to be undefined (not all boards have UART for example), and SDK will compile but warn as
needed in the absence of default.
◦
Added additional definition for a default WS2812 compatible pin (currently unused).
•
New reset options
◦
Added pico_bootsel_via_double_reset library to allow reset to BOOTSEL mode via double press of a RESET button
◦
When using pico_stdio_usb i.e. stdio connected via USB CDC to host, setting baud rate to 1200 (by default) can
optionally be used to reset into BOOTSEL mode.
◦
When using pico-stdio_usb i.e. stdio connected via USB CDC to host, an additional interface may be added to
give picotool control over resetting the device.
•
Build improvement for non-SDK or existing library builds
◦
Removed additional compiler warnings (register headers now use _u(x) macro for unsigned values though).
◦
Made build more clang friendly.
Raspberry Pi Pico-series C/C++ SDK
Release 1.0.0 (20/Jan/2021) 611

This release also contains many bug fixes, documentation updates and minor improvements.
Backwards incompatibility
There are some nominally backwards incompatible changes not worthy of a major version bump:
•
PICO_DEFAULT_UART_ defines now default to undefined if there is no default rather than -1 previously
•
The broken multicore_sleep_core1() API has been removed; multicore_reset_core1 is already available to put core 1
into a deep sleep.
Release 1.1.1 (01/Apr/2021)
This fixes a number of bugs, and additionally adds support for a board configuration header to choose the boot_stage2
Release 1.1.2 (07/Apr/2021)
Fixes issues with boot_stage2 selection
Release 1.2.0 (03/Jun/2021)
This release contains numerous bug fixes and documentation improvements. Additionally it contains the following
improvements/notable changes:
CAUTION
The lib/tinyusb submodule has been updated from 0.8.0 and now tracks upstream https://github.com/hathach/
tinyusb.git. It is worth making sure you do a
$ git submodule sync
$ git submodule update
to make sure you are correctly tracking upstream TinyUSB if you are not checking out a clean pico-sdk repository.
Moving from TinyUSB 0.8.0 to TinyUSB 0.10.1 may require some minor changes to your USB code.
New/improved Board headers
•
New board headers support for PICO_BOARDs arduino_nano_rp240_connect, pimoroni_picolipo_4mb and
pimoroni_picolipo_16mb
•
Missing/new #defines for default SPI and I2C pins have been added
Updated TinyUSB to 0.10.1
The lib/tinyusb submodule has been updated from 0.8.0 and now tracks upstream https://github.com/hathach/
tinyusb.git
Raspberry Pi Pico-series C/C++ SDK
Release 1.1.1 (01/Apr/2021) 612

Added CMSIS core headers
CMSIS core headers (e.g. core_cm0plus.h and RP2040.h) are made available via cmsis_core INTERFACE library. Additionally,
CMSIS standard exception naming is available via PICO_CMSIS_RENAME_EXCEPTIONS=1
API improvements
pico_sync
•
Added support for recursive mutexes via recursive_mutex_init() and auto_init_recursive_mutex()
•
Added mutex_enter_timeout_us()
•
Added critical_section_deinit()
•
Added sem_acquire_timeout_ms() and sem_acquire_block_until()
hardware_adc
•
Added adc_get_selected_input()
hardware_clocks
•
clock_get_hz() now returns actual achieved frequency rather than desired frequency
hardware_dma
•
Added dma_channel_is_claimed()
•
Added new methods for configuring/acknowledging DMA IRQs. dma_irqn_set_channel_enabled(),
dma_irqn_set_channel_mask_enabled(), dma_irqn_get_channel_status(), dma_irqn_acknowledge_channel() etc.
hardware_exception
New library for setting ARM exception handlers:
•
Added exception_set_exclusive_handler(), exception_restore_handler(), exception_get_vtable_handler()
hardware_flash
•
Exposed previously private function flash_do_cmd() for low level flash command execution
hardware_gpio
•
Added gpio_set_input_hysteresis_enabled(), gpio_is_input_hysteresis_enabled(), gpio_set_slew_rate(),
gpio_get_slew_rate(), gpio_set_drive_strength(), gpio_get_drive_strength(), gpio_get_out_level(), gpio_set_irqover()
hardware_i2c
•
Corrected a number of incorrect hardware register definitions
•
A number of edge cases in the i2c code fixed
Raspberry Pi Pico-series C/C++ SDK
Release 1.2.0 (03/Jun/2021) 613

hardware_interp
•
Added interp_lane_is_claimed(), interp_unclaim_lane_mask()
hardware_irq
•
Notably fixed the PICO_LOWEST/HIGHEST_IRQ_PRIORITY values which were backwards!
hardware_pio
•
Added new methods for configuring/acknowledging PIO interrupts (pio_set_irqn_source_enabled(),
pio_set_irqn_source_mask_enabled(), pio_interrupt_get(), pio_interrupt_clear() etc.)
•
Added pio_sm_is_claimed()
hardware_spi
•
Added spi_get_baudrate()
•
Changed spi_init() to return the set/achieved baud rate rather than void
•
Changed spi_is_writable() to return bool not size_t (it was always 1/0)
hardware_sync
•
Notable documentation improvements for spin lock functions
•
Added spin_lock_is_claimed()
hardware_timer
•
Added busy_wait_ms() to match busy_wait_us()
•
Added hardware_alarm_is_claimed()
pico_float/pico_double
•
Correctly save/restore divider state if floating point is used from interrupts
pico_int64_ops
•
Added PICO_INT64_OPS_IN_RAM flag to move code into RAM to avoid veneers when calling code is in RAM
pico_runtime
•
Added ability to override panic function by setting PICO_PANIC_FUNCTION=foo to then use foo as the implementation, or
setting PICO_PANIC_FUNCITON= to simply breakpoint, saving some code space
pico_unique_id
•
Added pico_get_unique_board_id_string().
Raspberry Pi Pico-series C/C++ SDK
Release 1.2.0 (03/Jun/2021) 614

General code improvements
•
Removed additional classes of compiler warnings
•
Added some missing const to method parameters
SVD
•
USB DPRAM for device mode is now included
pioasm
•
Added #pragma once to C/C++ output
RTOS interoperability
Improvements designed to make porting RTOSes either based on the SDK or supporting SDK code easier.
•
Added PICO_DIVIDER_DISABLE_INTERRUPTS flag to optionally configure all uses of the hardware divider to be guarded by
disabling interrupts, rather than requiring on the RTOS to save/restore the divider state on context switch
•
Added new abstractions to pico/lock_core.h to allow an RTOS to inject replacement code for SDK based low level
wait, notify and sleep/timeouts used by synchronization primitives in pico_sync and for sleep_ methods. If an RTOS
implements these few simple methods, then all SDK semaphore, mutex, queue, sleep methods can be safely used
both within/to/from RTOS tasks, but also to communicate with non-RTOS task aware code, whether it be existing
libraries and IRQ handlers or code running perhaps (though not necessarily) on the other core
CMake build changes
Substantive changes have been made to the CMake build, so if you are using a hand crafted non-CMake build, you will
need to update your compile/link flags. Additionally changed some possibly confusing status messages from CMake
build generation to be debug only
Boot Stage 2
•
New boot stage 2 for AT25SF128A
Release 1.3.0 (02/Nov/2021)
This release contains numerous bug fixes and documentation improvements. Additionally, it contains the following
notable changes/improvements:
Updated TinyUSB to 0.12.0
•
The lib/tinyusb submodule has been updated from 0.10.1 to 0.12.0. See https://github.com/hathach/tinyusb/
releases/tag/0.11.0 and https://github.com/hathach/tinyusb/releases/tag/0.12.0 for release notes.
•
Improvements have been made for projects that include TinyUSB and also compile with enhanced warning levels
and -Werror. Warnings have been fixed in RP2040 specific TinyUSB code, and in TinyUSB headers, and a new
cmake function suppress_tinyusb_warnings() has been added, that you may call from your CMakeLists.txt to suppress
warnings in other TinyUSB C files.
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.0 (02/Nov/2021) 615

New Board Support
The following boards have been added and may be specified via PICO_BOARD:
•
adafruit_trinkey_qt2040
•
melopero_shake_rp2040
•
pimoroni_interstate75
•
pimoroni_plasma2040
•
pybstick26_rp2040
•
waveshare_rp2040_lcd_0.96
•
waveshare_rp2040_plus_4mb
•
waveshare_rp2040_plus_16mb
•
waveshare_rp2040_zero
Updated SVD, hardware_regs, hardware_structs
The RP2040 SVD has been updated, fixing some register access types and adding new documentation.
The hardware_regs headers have been updated accordingly.
The hardware_structs headers which were previously hand coded, are now generated from the SVD, and retain select
documentation from the SVD, including register descriptions and register bit-field tables.
e.g. what was once
typedef struct {
Ê io_rw_32 ctrl;
Ê io_ro_32 fstat;
Ê ...
becomes:
// Reference to datasheet: https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf#tab-
registerlist_pio
//
// The _REG_ macro is intended to help make the register navigable in your IDE (for example, using
the "Go to Definition" feature)
// _REG_(x) will link to the corresponding register in hardware/regs/pio.h.
//
// Bit-field descriptions are of the form:
// BITMASK [BITRANGE]: FIELDNAME (RESETVALUE): DESCRIPTION
typedef struct {
Ê _REG_(PIO_CTRL_OFFSET) // PIO_CTRL
Ê // PIO control register
Ê // 0x00000f00 [11:8] : CLKDIV_RESTART (0): Restart a state machine's clock divider from an
initial phase of 0
Ê // 0x000000f0 [7:4] : SM_RESTART (0): Write 1 to instantly clear internal SM state which may
be otherwise difficult...
Ê // 0x0000000f [3:0] : SM_ENABLE (0): Enable/disable each of the four state machines by
writing 1/0 to each of these four bits
Ê io_rw_32 ctrl;
Ê _REG_(PIO_FSTAT_OFFSET) // PIO_FSTAT
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.0 (02/Nov/2021) 616

Ê // FIFO status register
Ê // 0x0f000000 [27:24] : TXEMPTY (0xf): State machine TX FIFO is empty
Ê // 0x000f0000 [19:16] : TXFULL (0): State machine TX FIFO is full
Ê // 0x00000f00 [11:8] : RXEMPTY (0xf): State machine RX FIFO is empty
Ê // 0x0000000f [3:0] : RXFULL (0): State machine RX FIFO is full
Ê io_ro_32 fstat;
Ê ...
Behavioural Changes
There were some behavioural changes in this release:
pico_sync
SDK 1.2.0 previously added recursive mutex support using the existing (previously non-recursive) mutex_ functions. This
caused a performance regression, and the only clean way to fix the problem was to return the mutex_ functions to their
pre-SDK 1.2.0 behaviour, and split the recursive mutex functionality out into separate recursive_mutex_ functions with a
separate recursive_mutex_ type.
Code using the SDK 1.2.0 recursive mutex functionality will need to be changed to use the new type and functions,
however as a convenience, the pre-processor define PICO_MUTEX_ENABLE_SDK120_COMPATIBILITY may be set to 1 to retain the
SDK 1.2.0 behaviour at the cost of an additional performance penalty. The ability to use this pre-processor define will be
removed in a subsequent SDK version.
pico_platform
•
pico.h and its dependencies have been slightly refactored so it can be included by assembler code as well as C/C
code. This ensures that assembler code and C/C code follow the same board configuration/override order and see
the same configuration defines. This should not break any existing code, but is notable enough to mention.
•
pico/platform.h is now fully documented.
pico_standard_link
-Wl,max-page-size=4096 is now passed to the linker, which is beneficial to certain users and should have no discernible
impact on the rest.
Other Notable Improvements
hardware_base
•
Added xip_noalloc_alias(addr), xip_nocache_alias(addr), xip_nocache_noalloc_alias(addr) macros for converting a flash
address between XIP aliases (similar to the hw_xxx_alias(addr) macros).
hardware_dma
•
Added dma_timer_claim(), dma_timer_unclaim(), dma_claim_unused_timer() and dma_timer_is_claimed() to manage
ownership of DMA timers.
•
Added dma_timer_set_fraction() and dma_get_timer_dreq() to facilitate pacing DMA transfers using DMA timers.
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.0 (02/Nov/2021) 617

hardware_i2c
•
Added i2c_get_dreq() function to facilitate configuring DMA transfers to/from an I2C instance.
hardware_irq
•
Added irq_get_priority().
•
Fixed implementation when PICO_DISABLE_SHARED_IRQ_HANDLERS=1 is specified, and allowed irq_add_shared_handler to be
used in this case (as long as there is only one handler - i.e. it behaves exactly like irq_set_exclusive_handler).
•
Sped up IRQ priority initialization which was slowing down per core initialization.
hardware_pio
•
pio_encode_ functions in hardware/pico_instructions.h are now documented.
hardware_pwm
•
Added pwm_get_dreq() function to facilitate configuring DMA transfers to a PWM slice.
hardware_spi
•
Added spi_get_dreq() function to facilitate configuring DMA transfers to/from an SPI instance.
hardware_uart
•
Added uart_get_dreq() function to facilitate configuring DMA transfers to/from a UART instance.
hardware_watchdog
•
Added watchdog_enable_caused_reboot() to distinguish a watchdog reboot caused by a watchdog timeout after calling
watchdog_enable() from other watchdog reboots (e.g. that are performed when a UF2 is dragged onto a device in
BOOTSEL mode).
pico_bootrom
•
Added new constants and function signature typedefs to pico/bootrom.h to facilitate calling bootrom functions
directly.
pico_multicore
•
Improved documentation in pico/multicore.h; particularly, multicore_lockout_ functions are newly documented.
pico_platform
•
PICO_RP2040 is now defined to 1 in PICO_PLATFORM=rp2040 (i.e. normal) builds.
pico_stdio
•
Added puts_raw() and putchar_raw() to skip CR/LF translation if enabled.
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.0 (02/Nov/2021) 618

•
Added stdio_usb_connected() to detect CDC connection when using stdio_usb.
•
Added PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS define that can be set to wait for a CDC connection to be established
during initialization of stdio_usb. Note: value -1 means indefinite. This can be used to prevent initial program output
being lost, at the cost of requiring an active CDC connection.
•
Fixed semihosting_putc which was completely broken.
pico_usb_reset_interface
•
This new library contains pico/usb_reset_interface.h split out from stdio_usb to facilitate inclusion in external
projects.
CMake build
•
OUTPUT_NAME target property is now respected when generating supplemental files (.BIN, .HEX, .MAP, .UF2)
pioasm
•
Operator precedence of *, /, -, + have been fixed
•
Incorrect MicroPython output has been fixed.
elf2uf2
•
A bug causing an error with binaries produced by certain other languages has been fixed.
Release 1.3.1 (18/May/2022)
This release contains numerous bug fixes and documentation improvements which are not all listed here; you can see
the full list of individual commits here.
New Board Support
The following boards have been added and may be specified via PICO_BOARD:
•
adafruit_kb2040
•
adafruit_macropad_rp2040
•
eetree_gamekit_rp2040
•
garatronic_pybstick26_rp2040 (renamed from pybstick26_rp2040)
•
pimoroni_badger2040
•
pimoroni_motor2040
•
pimoroni_servo2040
•
pimoroni_tiny2040_2mb
•
seeed_xiao_rp2040
•
solderparty_rp2040_stamp_carrier
•
solderparty_rp2040_stamp
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.1 (18/May/2022) 619
•
wiznet_w5100s_evb_pico
Notable Library Changes/Improvements
hardware_dma
•
New documentation has been added to the dma_channel_abort() function describing errata RP2040-E13, and how to
work around it.
hardware_irq
•
Fixed a bug related to removing and then re-adding shared IRQ handlers. It is now possible to add/remove handlers
as documented.
•
Added new documentation clarifying the fact the shared IRQ handler ordering "priorities" have values that increase
with higher priority vs. Cortex M0+ IRQ priorites which have values that decrease with priority!
hardware_pwm
•
Added a pwm_config_set_clkdiv_int_frac() method to complement pwm_config_set_clkdiv_int() and
pwm_config_set_clkdiv().
hardware_pio
•
Fixed the pio_set_irqn_source_mask_enabled() method which previously affected the wrong IRQ.
hardware_rtc
•
Added clarification to rtc_set_datetime() documentation that the new value may not be visible to a
rtc_get_datetime() very soon after, due to crossing of clock domains.
pico_platform
•
Added a busy_wait_at_least_cycles() method as a convenience method for a short tight-loop counter-based delay.
pico_stdio
•
Fixed a bug related to removing stdio "drivers". stdio_set_driver_enabled() can now be used freely to dynamically
enable and disable drivers during runtime.
pico_time
•
Added an is_at_the_end_of_time() method to check if a given time matches the SDK’s maximum time value.
Runtime
A bug in __ctzdi2() aka __builtin_ctz(uint64_t) was fixed.
Raspberry Pi Pico-series C/C++ SDK
Release 1.3.1 (18/May/2022) 620
Build
•
Compilation with GCC 11 is now supported.
•
PIOASM_EXTRA_SOURCE_FILES is now actually respected.
pioasm
•
Input files with Windows (CRLF) line endings are now accepted.
•
A bug in the python output was fixed.
elf2uf2
•
Extra padding was added to the UF2 output of misaligned or non-contiguous binaries to work around errata
RP2040-E14.
NOTE
The 1.3.0 release of the SDK incorrectly squashed the history of the changes. A new merge commit has been added
to restore the full history, and the 1.3.0 tag has been updated
Release 1.4.0 (30/Jun/2022)
This release adds wireless support for the Raspberry Pi Pico W, adds support for other new boards, and contains
various bug fixes, documentation improvements, and minor improvements/added functionality. You can see the full list
of individual commits here.
New Board Support
The following boards have been added and may be specified via PICO_BOARD:
•
pico_w
•
datanoisetv_rp2040_dsp
•
solderparty_rp2040_stamp_round_carrier
Wireless Support
•
Support for the Raspberry Pi Pico W is now included with the SDK (PICO_BOARD=pico_w). The Pico W uses a driver for
the wireless chip called cyw43_driver which is included as a submodule of the SDK. You need to initialize this
submodule for Pico W wireless support to be available. Note that the LED on the Pico W board is only accessible
via the wireless chip, and can be accessed via cyw43_arch_gpio_put() and cyw43_arch_gpio_get() (part of the
pico_cyw43_arch library described below). As a result of the LED being on the wireless chip, there is no
PICO_DEFAULT_LED_PIN setting and the default LED based examples in pico-examples do not work with the Pico W.
•
IP support is provided by lwIP which is also included as a submodule which you should initialize if you want to use
it.
The following libraries exposing lwIP functionality are provided by the SDK:
◦
pico_lwip_core (included in pico_lwip)
◦
pico_lwip_core4 (included in pico_lwip)
Raspberry Pi Pico-series C/C++ SDK
Release 1.4.0 (30/Jun/2022) 621

◦
pico_lwip_core6 (included in pico_lwip)
◦
pico_lwip_netif (included in pico_lwip)
◦
pico_lwip_sixlowpan (included in pico_lwip)
◦
pico_lwip_ppp (included in pico_lwip)
◦
pico_lwip_api (this is a blocking API that may be used with FreeRTOS and is not included in pico_lwip)
As referenced above, the SDK provides a pico_lwip which aggregates all of the commonly needed lwIP
functionality. You are of course free to use the substituent libraries explicitly instead.
The following libraries are provided that contain the equivalent lwIP application support:
◦
pico_lwip_snmp
◦
pico_lwip_http
◦
pico_lwip_makefsdata
◦
pico_lwip_iperf
◦
pico_lwip_smtp
◦
pico_lwip_sntp
◦
pico_lwip_mdns
◦
pico_lwip_netbios
◦
pico_lwip_tftp
◦
pico_lwip_mbedtls
•
Integration of the IP stack and the cyw43_driver network driver into the user’s code is handled by pico_cyw43_arch.
Both the IP stack and the driver need to do work in response to network traffic, and pico_cyw43_arch provides a
variety of strategies for servicing that work. Four architecture variants are currently provided as libraries:
◦
pico_cyw43_arch_lwip_poll - For using the RAW lwIP API (NO_SYS=1 mode) with polling. With this architecture the
user code must periodically poll via cyw43_arch_poll() to perform background work. This architecture matches
the common use of lwIP on microcontrollers, and provides no multicore safety
◦
pico_cyw43_arch_lwip_threadsafe_background - For using the RAW lwIP API (NO_SYS=1 mode) with multicore safety,
and automatic servicing of the cyw43_driver and lwIP in the background. User polling is not required with this
architecture, but care should be taken as lwIP callbacks happen in an IRQ context.
◦
pico_cyw43_arch_lwip_sys_freertos - For using the full lwIP API including blocking sockets in OS mode (NO_SYS=0),
along with multicore/task safety, and automatic servicing of the cyw43_driver and the lwIP stack in a separate
task. This powerful architecture works with both SMP and non-SMP variants of the RP2040 port of FreeRTOS-
Kernel. Note you must set FREERTOS_KERNEL_PATH in your build to use this variant.
◦
pico_cyw43_arch_none - If you do not need the TCP/IP stack but wish to use the on-board LED or other wireless
chip connected GPIOs.
See the library documentation or the pico/cyw43_arch.h header for more details.
Notable Library Changes/Improvements
hardware_dma
•
Added dma_unclaim_mask() function for un-claiming multiple DMA channels at once.
•
Added channel_config_set_high_priority() function to set the channel priority via a channel config object.
Raspberry Pi Pico-series C/C++ SDK
Release 1.4.0 (30/Jun/2022) 622

hardware_gpio
•
Improved the documentation for the pre-existing gpio IRQ functions which use the "one callback per core" callback
mechanism, and added a gpio_set_irq_callback() function to explicitly set the callback independently of enabling
per pin GPIO IRQs.
•
Reduced the latency of calling the existing "one callback per core" GPIO IRQ callback.
•
Added new support for the user to add their own shared GPIO IRQ handler independent of the pre-existing "one
callback per core" callback mechanism, allowing for independent usage of GPIO IRQs without having to share one
handler.
See the documentation in hardware/irq.h for full details of the functions added:
◦
gpio_add_raw_irq_handler()
◦
gpio_add_raw_irq_handler_masked()
◦
gpio_add_raw_irq_handler_with_order_priority()
◦
gpio_add_raw_irq_handler_with_order_priority_masked()
◦
gpio_remove_raw_irq_handler()
◦
gpio_remove_raw_irq_handler_masked()
•
Added a gpio_get_irq_event_mask() utility function for use by the new "raw" IRQ handlers.
hardware_irq
•
Added user_irq_claim(), user_irq_unclaim(), user_irq_claim_unused() and user_irq_is_claimed() functions for claiming
ownership of the user IRQs (the ones numbered 26-31 and not connected to any hardware). Uses of the user IRQs
have been updated to use these functions. For stdio_usb, the PICO_STDIO_USB_LOW_PRIORITY_IRQ define is still respected
if specified, but otherwise an unclaimed one is chosen.
•
Added an irq_is_shared_handler() function to determine if a particular IRQ uses a shared handler.
pico_sync
•
Added a sem_try_acquire() function, for non-blocking acquisition of a semaphore.
pico_stdio
•
stderr is now supported and goes to the same destination as stdout.
•
Zero timeouts for getchar_timeout_us() are now correctly honored (previously they were a 1μs minimum).
stdio_usb
•
The use of a 1ms timer to handle background TinyUSB work has been replaced with use of a more interrupt driven
approach using a user IRQ for better performance. Note this new feature is disabled if shared IRQ handlers are
disabled via PICO_DISABLE_SHARED_IRQ_HANDLERS=1
Miscellaneous
•
get_core_num() has been moved to pico/platform.h from hardware/sync.h.
•
The C library function realloc() is now multicore safe too.
•
The minimum PLL frequency has been increased from 400Mhz to 750Mhz to improve stability across operating
Raspberry Pi Pico-series C/C++ SDK
Release 1.4.0 (30/Jun/2022) 623

conditions. This should not affect the majority of users in any way, but may impact those trying to set particularly
low clock frequencies. If you do wish to return to the previous minimum, you can set PICO_PLL_VCO_MIN_FREQ_MHZ back
to 400. There is also a new PICO_PLL_VCO_MAX_FREQ_MHZ which defaults to 1600.
Build
•
Compilation with GCC 12 is now supported.
Release 1.5.0 (11/Feb/2023)
This release contains new libraries and functionality, along with numerous bug fixes and documentation improvements.
Highlights are listed below, or you can see the full list of individual commits here, and the full list of resolved issues
here.
New Board Support
The following boards have been added and may be specified via PICO_BOARD:
•
nullbits_bit_c_pro
•
waveshare_rp2040_lcd_1.28
•
waveshare_rp2040_one
Library Changes/Improvements
hardware_clocks
•
clock_gpio_init() now takes a float for the clock divider value, rather than an int.
•
Added clock_gpio_init_int_frac() function to allow initialization of integer and fractional part of the clock divider
value, without using float.
•
Added --ref-min option to vcocalc.py to override the minimum reference frequency allowed.
•
vcocalc.py now additionally considers reference frequency dividers greater than 1.
hardware_divider
•
Improved the performance of hw_divider_ functions.
hardware_dma
•
Added dma_sniffer_set_output_invert_enabled() and dma_sniffer_set_output_reverse_enabled() functions to configure
the DMA sniffer.
•
Added dma_sniffer_set_data_accumulator() and dma_sniffer_get_data_accumulator() functions to access the DMA
sniffer accumulator.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.0 (11/Feb/2023) 624

hardware_i2c
•
Added i2c_get_instance() function for consistency with other hardware_ libraries.
•
Added i2c_read_byte_raw(), i2c_write_byte_raw() functions to directly read and write the I2C data register for an I2C
instance.
hardware_timer
•
Added hardware_alarm_claim_unused() function to claim an unused hardware timer.
pico_cyw43_arch
•
Added cyw43_arch_wifi_connect_bssid_ variants of cyw43_arch_wifi_connect_ functions to allow connection to a
specific access point.
•
Blocking cyw43_arch_wifi_connect_ functions now continue trying to connect rather than failing immediately if the
network is not found.
•
cyw43_arch_wifi_connect_ functions now return consistent return codes (PICO_OK, or PICO_ERROR_XXX).
•
The pico_cyw43_arch library has been completely rewritten on top of the new pico_async_context library that
generically abstracts the different types of asynchronous operation (poll, threadsafe_background and freertos)
previously handled in a bespoke fashion by pico_cyw43_arch. Many edge case bugs have been fixed as a result of
this. Note that this change should be entirely backwards compatible from the user point of view.
•
cyw43_arch_init() and cyw43_arch_deinit() functions are now very thin layers which handle async_context life-cycles,
along with adding support for the cyw43_driver, lwIP, BTstack etc. to that async_context. Currently, these
mechanisms remain the preferred documented way to initialize Pico W networking, however you are free to do
similar initialization/de-initialization yourself.
•
Added cyw43_arch_set_async_context() function to specify a custom async_context prior to calling cyw43_arch_init*()
•
Added cyw43_arch_async_context() function to get the async_context used by the CYW43 architecture support.
•
Added cyw43_arch_init_default_async_context() function to return the async_context that cyw43_arch_init*() would
initialize if one has not been set by the user.
•
Added cyw43_arch_wait_for_work_until() function to block until there is networking work to be done. This is most
useful for poll style applications that have no other work to do and wish to sleep until cyw43_arch_poll() needs to be
called again.
pico_cyw43_driver
•
The functionality has been clarified into 3 separate libraries:
◦
cyw43_driver - the raw cyw43_driver code.
◦
cyw43_driver_picow - additional support for communication with the Wi-Fi chip over SPI on Pico W.
◦
pico_cyw43_driver - integration of the cyw43_driver with the pico-sdk via async_context
•
Added CYW43_WIFI_NVRAM_INCLUDE_FILE define to allow user to override the NVRAM file.
pico_divider
•
Improved the performance of 64-bit divider functions.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.0 (11/Feb/2023) 625

pico_platform
•
Add panic_compact() function that discards the message to save space in non-debug (NEBUG defined) builds.
pico_runtime
•
Added proper implementation of certain missing newlib system APIs: _gettimeofday(), _times(), _isatty(), _getpid().
•
The above changes enable certain additional C/C++ library functionality such as gettimeofday(), times() and
std::chrono.
•
Added settimeofday() implementation such that gettimeofday() can be meaningfully used.
•
Added default (return -1) implementations of the remaining newlib system APIs: _open(), _close(), _lseek(), _fstat(),
_isatty(), _kill(), to prevent warnings on GCC 12.
•
Made all newlib system API implementations weak so the user can override them.
pico_stdio
•
pico_stdio allows for outputting from within an IRQ handler that creates the potential for deadlocks (especially with
pico_stdio_usb), and the intention is to not deadlock but instead discard output in any cases where a deadlock
would otherwise occur. The code has been revamped to avoid more deadlock cases, and a new define
PICO_STDIO_DEADLOCK_TIMEOUT_MS has been added to catch remaining cases that might be caused by user level locking.
•
Added stdio_set_chars_available_callback() function to set a callback to be called when input is available. See also
the new PICO_STDIO_USB_SUPPORT_CHARS_AVAILABLE_CALLBACK and PICO_STDIO_UART_SUPPORT_CHARS_AVAILABLE_CALLBACK defines
which both default to 1 and control the availability of this new feature for USB and UART stdio respectively (at the
cost of a little more code).
•
Improved performance of stdio_semihosting.
•
Give the user more control over the USB descriptors of stdio_usb via USBD_VID, USBD_PID, USBD_PRODUCT,
PICO_STDIO_USB_CONNECTION_WITHOUT_DTR and PICO_STDIO_USB_DEVICE_SELF_POWERED
pico_sync
•
Added critical_section_is_initialized() function to test if a critical section has been initialized.
•
Added mutex_try_enter_block_until() function to wait only up to a certain time to acquire a mutex.
pico_time
•
Added from_us_since_boot() function to convert a uint64_t timestamp to an absolute_time_t.
•
Added absolute_time_min() function to return the earlier of two absolute_time_t values.
•
Added alarm_pool_create_with_unused_hardware_alarm() function to create an alarm pool using a hardware alarm
number claimed using hardware_alarm_claim().
•
Added alarm_pool_core_num() function to determine what core an alarm pool runs on.
•
Added alarm_pool_add_alarm_at_force_in_context() function to add an alarm, and have it always run in the IRQ
context even if the target time is in the past, or during the call. This may be simpler in some cases than dealing
with the fire_if_past parameters to existing functions, and avoids some callbacks happening from non-IRQ
context.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.0 (11/Feb/2023) 626

pico_lwip
•
Added pico_lwip_mqtt library to expose the MQTT app functionality in lwIP.
•
Added pico_lwip_mdns library to expose the MDNS app functionality in lwIP.
•
Added pico_lwip_freertos library for NO_SYS=0 with FreeRTOS as a complement to pico_lwip_nosys for NO_SYS=1.
TinyUSB
•
TinyUSB has upgraded from 0.12.0 to 0.15.0. See TinyUSB release notes here for details.
•
Particularly host support should be massively improved.
•
Defaulted new TinyUSB dcd_rp2040 driver’s TUD_OPT_RP2040_USB_DEVICE_UFRAME_FIX variable to 1 as a workaround for
errata RP2040-E15. This fix is required for correctness, but comes at the cost of some performance, so
applications that won’t ever be plugged into a Pi 4 or Pi 400 can optionally disable this by setting the value of
TUD_OPT_RP2040_USB_DEVICE_UFRAME_FIX to 0 either via target_compile_definitions in their CMakeLists.txt or in their
tusb_config.h.
New Libraries
pico_async_context
•
Provides support for asynchronous events (timers/IRQ notifications) to be handled in a safe context without
concurrent execution (as required by many asynchronous 3rd party libraries).
•
Provides implementations matching those previously implemented in pico_cyw43_arch:
◦
poll - Not thread-safe; the user must call async_context_poll() periodically from their main loop, but can call
async_context_wait_for_work_until() to block until work is required.
◦
threadsafe_background - No polling is required; instead asynchronous work is performed in a low priority IRQ.
Locking is provided such that IRQ/non-IRQ or multiple cores can interact safely.
◦
freertos - Asynchronous work is performed in a separate FreeRTOS task.
•
async_context guarantees all callbacks happen on a single core.
•
async_context supports multiple instances for providing independent context which can execute concurrently with
respect to each other.
pico_i2c_slave
•
A (slightly modified) pico_i2c_slave library from https://github.com/vmilea/pico_i2c_slave
•
Adds a callback style event API for handling I2C slave requests.
pico_mbedtls
•
Added pico_mbedtls library to provide MBed TLS support. You can depend on both pico_lwip_mbedtls and pico_mbedtls
to use MBed TLS and lwIP together. See the tls_client example in pico-examples for more details.
pico_rand
•
Implements a new Random Number Generator API.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.0 (11/Feb/2023) 627

•
pico_rand generates random numbers at runtime utilizing a number of possible entropy sources, and uses those
sources to modify the state of a 128-bit 'Pseudo Random Number Generator' implemented in software.
•
Adds get_rand_32(), get_rand_64() and get_rand_128() functions to return largely unpredictable random numbers
(which should be different on each board/run for example).
Miscellaneous
•
Added a new header hardware/structs/nvic.h with a struct for the Arm Cortex M0+ NVIC available via the nvic_hw
pointer.
•
Added new PICO_CXX_DISABLE_ALLOCATION_OVERRIDES which can be set to 1 if you do not want pico_standard_link to
include non-exceptional overrides of std::new, std::new[], std::delete and std::delete[] when exceptions are
disabled.
•
elf2uf2 now correctly uses LMA instead of VMA of the entry point to determine binary type (flash/RAM). This is
required to support some exotic binaries correctly.
Build
•
The build will now check for a functional compiler via the standard CMake mechanism.
•
The build will pick up pre-installed elf2uf2 and pioasm if found via an installed pico-sdk-tools CMake package. If it can
do so, then no native compiler is required for the build!
•
It is now possible to switch the board type PICO_BOARD in an existing CMake build directory.
•
ARCHIVE_OUTPUT_DIRECTORY is now respected in build for UF2 output files.
•
Spaces are now supported in the path to the pico-sdk
•
All libraries xxx in the pico-sdk now support a xxx_headers variant that just pulls in the libraries' headers. These
xxx_headers libraries correctly mirror the dependencies of the xxx libraries, so you can use xxx_headers instead of xxx
as your dependency if you do not want to pull in any implementation files (perhaps if you are making a STATIC
library). Actually the "all" is not quite true, non-code libraries such as pico_standard_link and pico_cxx_options are an
exception.
Bluetooth Support for Pico W (BETA)
The support is currently available as a beta. More details will be forthcoming with the actual release. In the meantime,
there are examples in pico-examples.
Key changes:
•
The Bluetooth API is provided by BTstack.
•
The following new libraries are provided that expose core BTstack functionality:
◦
pico_btstack_ble - Adds Bluetooth Low Energy (LE) support.
◦
pico_btstack_classic - Adds Bluetooth Classic support.
◦
pico_btstack_sbc_encoder - Adds Bluetooth Sub Band Coding (SBC) encoder support.
◦
pico_btstack_sbc_decoder - Adds Bluetooth Sub Band Coding (SBC) decoder support.
◦
pico_btstack_bnep_lwip - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using LwIP.
◦
pico_btstack_bnep_lwip_sys_freertos - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using
LwIP with FreeRTOS for NO_SYS=0.
•
The following integration libraries are also provided:
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.0 (11/Feb/2023) 628

◦
pico_btstack_run_loop_async_context - provides a common async_context backed implementation of a BTstack
"run loop" that can be used for all BTstack use with the pico-sdk.
◦
pico_btstack_flash_bank - provides a sample implementation for storing required Bluetooth state in flash.
◦
pico_btstack_cyw43 - integrates BTstack with the CYW43 driver.
•
Added CMake function pico_btstack_make_gatt_header that can be used to run the BTstack compile_gatt tool to make a
GATT header file from a BTstack GATT file.
•
Updated pico_cyw43_driver and cyw43_driver to support HCI communication for Bluetooth.
•
Updated cyw43_driver_picow to support Pico W specific HCI communication for Bluetooth over SPI.
•
Updated cyw43_arch_init() and cyw43_arch_deinit() to additionally handle Bluetooth support if CYW43_ENABLE_BLUETOOTH
is 1 (as it will be automatically if you depend on pico_btstack_cyw43).
Release 1.5.1 (14/Jun/2023)
This release is largely a bug fix release, however it also makes Bluetooth support official and adds some new libraries
and functionality.
Highlights are listed below, or you can see the full list of individual commits here, and the full list of resolved issues
here.
Board Support
The following board has been added and may be specified via PICO_BOARD:
•
pololu_3pi_2040_robot
The following board configurations have been modified:
•
adafruit_itsybitsy_rp2040 - corrected the mismatched PICO_DEFAULT_I2C bus number (favors the breadboard pins not
the stemma connector).
•
sparkfun_thingplus - added WS2812 pin config.
Library Changes/Improvements
hardware_dma
•
Added dma_channel_cleanup() function that can be used to clean up a dynamically claimed DMA channel after use,
such that it won’t be in a surprising state for the next user, making sure that any in-flight transfer is aborted, and no
interrupts are left pending.
hardware_spi
•
The spi_set_format, spi_set_slave, spi_set_baudrate functions that modify the configuration of an SPI instance, now
disable the SPI while changing the configuration as specified in the data sheet.
pico_async_context
•
Added user_data member to async_when_pending_worker_t to match async_at_time_worker_t.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.1 (14/Jun/2023) 629

pico_cyw43_arch
•
Added cyw43_arch_disable_sta_mode() function to complement cyw43_arch_enable_sta_mode().
•
Added cyw43_arch_disable_ap_mode() function to complement cyw43_arch_enable_ap_mode().
pico_stdio_usb
•
The 20-character limit for descriptor strings USBD_PRODUCT and USBD_MANUFACTURER can now be extended by defining
USBD_DESC_STR_MAX.
•
PICO_STDIO_USB_CONNECT_WAIT_TIMEOUT_MS is now supported in the build as well as compiler definitions; if it is set in the
build, it is added to the compile definitions.
pico_rand
•
Fixed poor randomness when PICO_RAND_ENTROPY_SRC_BUS_PERF_COUNTER=1.
PLL and Clocks
•
The set_sys_clock_pll and set_sys_clock_khz methods now reference a pre-processor define
PICO_CLOCK_AJDUST_PERI_CLOCK_WITH_SYS_CLOCK. If set to 1, the peripheral clock is updated to match the new system
clock, otherwise the preexisting behavior (of setting the peripheral clock to a safe 48Mhz) is preserved.
•
Support for non-standard crystal frequencies, and compile-time custom clock configurations:
◦
The new define XOSC_KHZ is used in preference to the preexisting XOSC_MHZ to define the crystal oscillator
frequency. This value is now also correctly plumbed through the various clock setup functions, such that they
behave correctly with a crystal frequency other than 12Mhz. XOSC_MHZ will be automatically defined for
backwards compatibility if XOSC_KHZ is an exact multiple of 1000 Khz. Note that either XOSC_MHZ or XOSC_KHZ may
be specified by the user, but not both.
◦
The new define PLL_COMMON_REFDIV can be specified to override the default reference divider of 1.
◦
The new defines PLL_SYS_VCO_FREQ_KHZ, PLL_SYS_POSTDIV1 and PLL_SYS_POSTDIV2 are used to configure the system
clock PLL during runtime initialization. These are defaulted for you if SYS_CLK_KHZ=125000, XOSC_KHZ=12000 and
PLL_COMMON_REFDIV=1. You can modify these values in your CMakeLists.txt if you want to configure a different
system clock during runtime initialization, or are using a non-standard crystal.
◦
The new defines PLL_USB_VCO_FREQ_KHZ, PLL_USB_POSTDIV1 and PLL_USB_POSTDIV2 are used to configure the USB
clock PLL during runtime initialization. These are defaulted for you if USB_CLK_KHZ=48000, XOSC_KHZ=12000 and
PLL_COMMON_REFDIV=1. You can modify these values in your CMakeLists.txt if you want to configure a different
USB clock if you are using a non-standard crystal.
◦
The new define PICO_PLL_VCO_MIN_FREQ_KHZ is used in preference to the pre-existing PICO_PLL_VCO_MIN_FREQ_MHZ,
though specifying either is supported.
◦
The new define PICO_PLL_VCO_MAX_FREQ_KHZ is used in preference to the pre-existing PICO_PLL_VCO_MAX_FREQ_MHZ,
though specifying either is supported.
New Libraries
pico_flash
•
This is a new higher level library than hardware_flash. It provides helper functions to facilitate getting into a state
where it is safe to write to flash (the default implementation disables interrupts on the current core, and if
necessary, makes sure the other core is running from RAM, and has interrupts disabled).
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.1 (14/Jun/2023) 630

•
Adds a flash_safe_execute() function to execute a callback function while in the "safe" state.
•
Adds a flash_safe_execute_core_init() function which must be called from the "other core" when using
pico_multicore to enable the cooperative support for entering a "safe" state.
•
Supports user override of the mechanism by overriding the get_flash_safety_helper() function.
Miscellaneous
•
All assembly (including inline) in the SDK now uses the unified syntax.
◦
New C macros pico_default_asm( … ) and pico_default_asm_volatile( … ) are provided that are equivalent to
asm andasm volatile blocks, but with a .syntax unified at the beginning.
•
A new assembler macro pico_default_asm_setup is provided to configure the correct CPU and dialect.
•
Some code cleanup to make the SDK code at least compile cleanly on Clang and IAR.
Build
•
PICO_BOARD and PICO_BOARD_HEADER_DIRS now correctly use the latest environment variable value if present.
•
A CMake performance regression due to repeated calls to find_package has been fixed.
•
Experimental support is provided for compiling with Clang. As an example, you can build with the LLVM Embedded
Toolchain for Arm, noting however that currently only version 14.0.0 works, as later versions use picolib rather
than newlib.
◦
Note that if you are using TinyUSB you need to use the latest master to compile with Clang.
$ mkdir clang_build
$ cd clang_build
$ cmake -DPICO_COMPILER=pico_arm_clang -DPICO_TOOLCHAIN_PATH=/path/to/arm-embedded-llvm
-14.0.0 ..
$ make
Bluetooth Support for Pico W
The support is now official. Please find examples in pico-examples.
•
The Bluetooth API is provided by BTstack.
•
The following libraries are provided that expose core BTstack functionality:
◦
pico_btstack_ble - Adds Bluetooth Low Energy (LE) support.
◦
pico_btstack_classic - Adds Bluetooth Classic support.
◦
pico_btstack_sbc_encoder - Adds Bluetooth Sub Band Coding (SBC) encoder support.
◦
pico_btstack_sbc_decoder - Adds Bluetooth Sub Band Coding (SBC) decoder support.
◦
pico_btstack_bnep_lwip - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using LwIP.
◦
pico_btstack_bnep_lwip_sys_freertos - Adds Bluetooth Network Encapsulation Protocol (BNEP) support using
LwIP with FreeRTOS for NO_SYS=0.
•
The following integration libraries are also provided:
◦
pico_btstack_run_loop_async_context - provides a common async_context backed implementation of a BTstack
"run loop" that can be used for all BTstack use with the pico-sdk.
Raspberry Pi Pico-series C/C++ SDK
Release 1.5.1 (14/Jun/2023) 631

◦
pico_btstack_flash_bank - provides a sample implementation for storing required Bluetooth state in flash.
◦
pico_btstack_cyw43 - integrates BTstack with the CYW43 driver.
•
The CMake function pico_btstack_make_gatt_header can be used to run the BTstack compile_gatt tool to make a GATT
header file from a BTstack GATT file.
•
pico_cyw43_driver and cyw43_driver now support HCI communication for Bluetooth.
•
cyw43_driver_picow now supports Pico W specific HCI communication for Bluetooth over SPI.
•
cyw43_arch_init() and cyw43_arch_deinit() automatically handle Bluetooth support if CYW43_ENABLE_BLUETOOTH is 1 (as it
will be automatically if you depend on pico_btstack_cyw43).
Key changes since 1.5.0:
•
Added Raspberry Pi specific BTstack license.
•
The storage offset in flash for pico_btstack_flash_bank can be specified at runtime by defining
pico_flash_bank_get_storage_offset_func to your own function to return the offset within flash.
•
pico_btstack_flash_bank is now safe for multicore / FreeRTOS SMP use, as it uses the new pico_flash library to make
sure the other core is not accessing flash during flash updates. If you are using pico_multicore you must have
called flash_safe_execute_core_init from the "other" core (to the one Bluetooth is running on).
•
Automatically set Bluetooth MAC address to the correct MAC address (Wi-Fi MAC address + 1), as some devices
do not have it set in OTP and were using the same default MAC from the Bluetooth chip causing collisions.
•
Various bug-fixes and stability improvements (especially with concurrent Wi-Fi), including updating cyw43_driver
and btstack to the newest versions.
Release 2.0.0 (08/Aug/2024)
This is a major release which adds support for the new RP2350 and for compiling RISC-V code in addition to Arm.
•
There is a lot of new functionality in the RP2350 microcontroller, it is recommended that you read the RP2350
Datasheet
•
There is a lot of new functionality in the SDK, it is also worth reading the Raspberry Pi Pico-series C/C++ SDK book.
This also includes documentation for RP2040 and RP2350 APIs, along with much more complete documentation
of SDK #defines and CMake build variables.
Notices
•
You should delete/recreate all build directories when upgrading from previous versions of the Raspberry Pi Pico
SDK
Major New Features
Support for RP2350
Many programs you have written for RP2040 (say a Raspberry Pi Pico) should work unmodified on RP2350 (say a
Raspberry Pi Pico 2) even when compiled for RISC-V.
•
You can now specify rp2350-arm-s (Arm Secure) or rp2350-riscv (RISC-V) as well as the previous rp2040 (default) and
host.
•
Setting PICO_BOARD=some_board will now set PICO_PLATFORM if one is specified in some_board.h since most boards either
use exclusively RP2040 or RP2350.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 632
•
PICO_PLATFORM also supports rp2350 but this gets replaced with the value PICO_DEFAULT_RP2350_PLATFORM which you can
set in your environment or CMakeLists.txt. Many of the boards for RP2350 - including pico2- select rp2350 as the
PICO_BOARD to honour your preference.
•
NOTE: This release of the SDK does not support writing Arm Non-Secure binaries to run under the wing of an Arm
Secure binary. This support will be added in a subsequent release.
Security and Code Signing
•
The RP2350 bootrom contains support for signed images and a variety of other security features. The SDK
supports building signed images etc. as part of the CMake build. For further information, please read RP2350
Datasheet "Bootrom Concepts" section, and also the Raspberry Pi Pico-series C/C++ SDK book for details on
configuring your build to sign code. Note that signed code is only applicable to chips that have been locked down
for security, but you can also hash your image for integrity checking.
Board Support
The following boards have been added and may be specified via PICO_BOARD:
•
defcon32_badge
•
gen4_rp2350_24
•
gen4_rp2350_24ct
•
gen4_rp2350_24t
•
gen4_rp2350_28
•
gen4_rp2350_28ct
•
gen4_rp2350_28t
•
gen4_rp2350_32
•
gen4_rp2350_32ct
•
gen4_rp2350_32t
•
gen4_rp2350_35
•
gen4_rp2350_35ct
•
gen4_rp2350_35t
•
hellbender_2350A_devboard
•
ilabs_challenger_rp2350_bconnect
•
ilabs_challenger_rp2350_wifi_ble
•
melopero_perpetuo_rp2350_lora
•
phyx_rick_tny_rp2350
•
pico2
•
pimoroni_pga2350
•
pimoroni_pico_plus2_rp2350
•
pimoroni_plasma2350
•
pimoroni_tiny2350
•
seeed_xiao_rp2350
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 633

•
solderparty_rp2350_stamp
•
solderparty_rp2350_stamp_xl
•
sparkfun_promicro_rp2350
•
switchscience_picossci2_conta_base
•
switchscience_picossci2_dev_board
•
switchscience_picossci2_micro
•
switchscience_picossci2_rp2350_breakout
•
switchscience_picossci2_tiny
•
tinycircuits_thumby_color_rp2350
New Libraries
hardware_boot_lock (RP2350)
•
New library for accessing the BOOT locks from secure code.
hardware_dcp (RP2350 Arm)
•
Contains assembler macros for individual DCP (Double Co-Processor) instructions
•
Contains assembler macros for canned instruction sequences for higher-level operations
•
HAS_DOUBLE_COPROCESSOR define indicates hardware support
hardware_hazard3 (RP2350 RISC-V)
•
Assembler macros and inline functions for accessing Hazard3 extensions
hardware_powman (RP2350)
•
Hardware APIs for the Power Management hardware.
•
HAS_POWMAN_TIMER define indicates hardware support.
hardware_rcp (RP2350 Arm)
•
Contains inline functions and assembler macros for the RCP (Redundancy Co-Processor) instructions.
•
HAS_REDUNDANCY_COPROCESSOR define indicates hardware support.
hardware_riscv_platform_timer (RP2350)
•
Hardware APIs for the RISC-V Platform Timer (which is also made available on Arm).
hardware_sha256 (RP2350)
•
Hardware APIs for the SHA256 hashing hardware.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 634

hardware_ticks
•
Hardware APIs for the RP2350 tick generators.
•
On RP2040 the same API is used, but only one tick generator TICK_WATCHDOG is used, which is backed by the
hardware in the RP2040 WatchDog hardware.
pico_aon_timer
•
Abstraction for a hardware timer that is "Always-On", and can wake the processor up even from a low power state
at a given time.
◦
On RP2040 this uses the RTC.
◦
On RP2350 this uses the Powman Timer.
pico_atomic
•
Additional support for C11 atomic functions using spin lock number PICO_SPINLOCK_ID_ATOMIC.
◦
On RP2040, all functions are implemented via spinlock.
◦
On RP2350, only 64-bit or arbitrary-sized atomics are implemented via spin lock; the rest use processor
exclusive/atomic instructions.
▪
Note ACTLR.EXTEXCLALL must be set to 1 on each processor for the exclusive instructions to work. This is
done automatically in the SDK by one of the per-core initializers in pico_runtime_init.
•
Included by pico_runtime by default.
pico_boot_lock (RP2350)
•
Support for acquiring and releasing locks to prevent concurrent use of hardware resources used by bootrom
functions.
•
Enabled via PICO_BOOTROM_LOCKING_ENABLED which defaults to 1 on RP2350.
•
Some bootrom functions use shared resources such as the single SHA256 or put hardware such as the OTP or XIP
interface into a state that cannot execute concurrently with certain other code. The bootrom supports checking
that the resource is owned, and this library turns that checking on.
•
The bootrom function wrappers in pico_bootrom call the functions in pico_boot_lock around affected bootrom
functions, and thus will take and release locks if PICO_BOOTROM_LOCKING_ENABLED=1.
•
NUM_BOOT_LOCKS define indicates the number of boot locks (8 on 'RP2350', 0 on 'RP2040').
pico_clib_interface
•
New library to encapsulate the interface between the SDK and the C library.
•
Supports
◦
newlib (full).
◦
picolibc (preview).
◦
llvm-libc(preview).
•
Included by pico_runtime by default.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 635

pico_crt0
•
New library split out of pico_standard_link to encapsulate the earliest startup code before the runtime initialisation,
and shutdown code after the runtime.
•
Repository for the default RP2040 and RP2350 linker scripts.
◦
The flash size specified in the board header is now used when linking which is handy if you have >2MB of
flash and >2MB of code/data.
◦
Note: The linker scripts have changed since the previous release of the SDK. If you have custom linker scripts,
it is recommended that you update them to match.
▪
In particular the new linker scripts include an "embedded block" which is required for a binary to boot on
RP2350.
▪
__HeapLimit is now defined to be the end of RAM rather than the end of a PICO_HEAP_SIZE chunk, to better
match the standard behaviour. PICO_HEAP_SIZE is the minimum heap size required, and space is required
for it at link time. sbrk in the previous SDK ignored it anyway and used the end of RAM so there is no
functional change there.
•
Included by pico_runtime by default
pico_cxx_options
•
New library split out of pico_standard_link to configure C++ options.
•
Included by pico_standard_link by default.
pico_platform_compiler
•
New library split out of pico_platform with the functions/macros related to the compiler.
•
Included by pico_platform by default.
pico_platform_panic
•
New library split out of pico_platform with the panic function implementation.
•
Included by pico_platform by default.
pico_platform_sections
•
New library split out of pico_platform with the section macros such as __not_in_flash_func.
•
Included by pico_platform by default.
pico_runtime_init
•
Contains the standard initialisers that should get run before main, or per core.
•
Unlike in the previous SDK version where runtime_init() was a monolithic function which also called some
__preinit_array initialisers, the new runtime_init library:
◦
Separates each initialiser out individually, for say initialiser "foo".
▪
Defines PICO_RUNTIME_INIT_FOO which is a "12345" line number ordering of the initialiser with respect to
others.
▪
Declares runtime_init_foo() which is the actual initialiser.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 636

▪
If PICO_RUNTIME_SKIP_INIT_FOO is not set, it adds the initialiser entry to call runtime_init_foo() before main (or
per core initialisation).
▪
If PICO_RUNTIME_NO_INIT_FOO is not set, it adds the (weak) implementation of runtime_init_foo().
▪
This gives the user full control to customise runtime initialisation, either skipping or replacing parts.
•
Included by pico_runtime by default.
pico_sha256
•
High level APIs for generating SHA256 hashes both synchronously and asynchronously
pico_standard_binary_info
•
New library split out of pico_standard_link that adds the "common" binary info items to the binary.
•
Included by pico_standard_link by default.
Library Changes / Improvements
Note that all hardware libraries now support the increased number of GPIOs on RP2350B in APIs that take a GPIO
number; this is not noted for every library.
pico_base
•
More error return codes were added to pico/error.h, mostly because these are the same values returned by RP2350
bootrom API functions, but also a number of new SDK APIs also return meaningful errors.
•
In pico/types.h, by popular demand, absolute_time_t now always defaults to uint64_t regardless of the type of build.
You can set PICO_OPAQUE_ABSOLUTE_TIME_T=1 to make it a struct in all build types.
pico_binary_info
•
Now supports > 32 GPIO pins when PICO_BINARY_INFO_USE_PINS_64=1 - this is defaulted for you based on the number
of GPIOs on the board.
hardware_adc
•
PARAM_ASSERTIONS_ENABLED_ADC is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_ADC - the old define is still supported as
a fallback.
•
ADC_TEMPERATURE_CHANNEL_NUM added since this value varies between RP2040 and RP2350.
hardware_clocks
•
set_sys_clock_ functions are now in hardware/clocks.h.
•
Clock configuration.
◦
PLL_COMMON_REFDIV is deprecated in favour of PLL_SYS_REFDIV and PLL_USB_REFDIV.
◦
PLL_SYS_VCO_FREQ_HZ is new and preferred over PLL_SYS_VCO_FREQ_KHZ.
◦
PLL_USB_VCO_FREQ_HZ is new and preferred over PLL_USB_VCO_FREQ_KHZ.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 637

◦
XOSC_HZ, SYS_CLK_HZ, USB_CLK_HZ now added, and take preference over the still supported XOSC_KHZ, SYS_CLK_KHZ, and
USB_CLK_KHZ.
◦
set_sys_clock_hz() and check_sys_clock_hz() added.
◦
clock_configure_undivided() and clock_configure_int_divider() for no divisor or a whole integer divider as the
code doesn’t require 64-bit arithmetic and thus saves space.
◦
The enum clock_index no longer exists and has been replaced with clock_num_t. However, all clock functions
now take clock_handle_t to allow for future enhancement. This is currently just an alias for clock_num_t
◦
vcocalc.py can now be used to generate the CMake configuration for a particular clock setting.
◦
The default system clock on RP2350 is 150Mhz.
hardware_divider
•
Since the RP2350 processors have efficient divider instructions, RP2350 has no SIO HW Divider. Software versions
of the hardware_divider functions are provided for RP2350.
•
HAS_SIO_DIVIDER define is now provided for you.
hardware_dma
•
PARAM_ASSERTIONS_ENABLED_DMA is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_DMA - the old define is still supported as
a fallback.
•
Added dma_get_irq_num()`function and `DMA_IRQ_NUM() macro to return the process IRQ Number for the n th DMA IRQ.
•
NUM_DMA_IRQS define is provided for you.
◦
it is 2 on RP2040 and 4 on RP2350.
hardware_exception
•
PARAM_ASSERTIONS_ENABLED_EXCEPTION is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_EXCEPTION - the old define is still
supported as a fallback.
•
Added RISC-V support.
◦
exception numbers are processor exception cause numbers.
•
exeception_[get|set]_priority() are added for Arm.
hardware_flash
•
PARAM_ASSERTIONS_ENABLED_FLASH is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_FLASH - the old define is still
supported as a fallback.
•
flash_flush_cache() is added.
hardware_gpio
•
PARAM_ASSERTIONS_ENABLED_GPIO is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_GPIO - the old define is still supported
as a fallback.
•
The enum gpio_function no longer exists and has been replaced with gpio_function_t.
•
gpio_xxx_masked() functions now have a gpio_xxx_masked64() variant that takes a 64-bit mask of GPIO indexes.
•
gpio_xxx_mask() functions now have a gpio_xxx_mask64() variant that takes a 64-bit mask of GPIO indexes.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 638

•
gpio_get_all64() added to read the state of >32 pins.
•
gpio_put_all64() added to write the state of >32 pins.
•
On Arm RP2350 GPIO Co-Processor instructions are used by default. This is controlled via
PICO_USE_GPIO_COPROCESSOR.
•
HAS_GPIO_COPROCESSOR define indicates hardware support.
hardware_i2c
•
PARAM_ASSERTIONS_ENABLED_I2C is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_I2C - the old define is still supported as
a fallback.
•
PICO_DEFAULT_I2C_INSTANCE() macro added which is equivalent to the pre-existing i2c_default
•
Added I2C_NUM(), I2C_INSTANCE(), I2C_DREQ_NUM() macros to abstract differences between platforms.
•
Fixed per-character timeouts.
hardware_interp
•
PARAM_ASSERTIONS_ENABLED_INTERP is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_INTERP - the old define is still
supported as a fallback.
hardware_irq
•
PARAM_ASSERTIONS_ENABLED_IRQ is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_IRQ - the old define is still supported as
a fallback.
•
irq_xxx_mask_xxx() functions now have a gpio_xxx_mask_n_xxx() variant that affects the n th set of 32 IRQs
•
Expose runtime_init_per_core_irq_priorities() function
•
Added irq_set_riscv_vector_handler() function to replace code entries in the machine vector table.
hardware_pio
•
PARAM_ASSERTIONS_ENABLED_PIO is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_PIO - the old define is still supported as
a fallback.
•
PICO_PIO_VERSION is used to determine whether new RP2350 functionality (PICO_PIO_VERSION=1) is supported. This is
defaulted based on the platform.
•
PICO_PIO_USE_GPIO_BASE is used to determine whether support is enabled for GPIOs above 32. TThe default value is
set based on the chip package.
•
Added pio_sm_set_jmp_pin().
•
Added pio_claim_free_sm_and_add_program(), pio_claim_free_sm_and_add_program_for_gpio_range() and
`pio_remove_program_and_unclaim_sm() to simplify finding and claiming a free PIO instance and state machine
and installing programs.
•
Added `pio_get_irq_num()`function to return the process IRQ Number for the n th PIO IRQ for a PIO instance.
•
Added PIO_NUM(), PIO_INSTANCE(), PIO_IRQ_NUM(), PIO_DREQ_NUM() and PIO_FUNCSEL_NUM() macros to abstract differences
between platforms.
•
Added sm_config_set_out_pin_base() and sm_config_set_out_pin_count().
•
Added sm_config_set_in_pin_base() and sm_config_set_in_pin_count(). Note the latter is only meaningful on
PICO_PIO_VERSION=1 which supports a limit.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 639

•
Added sm_config_set_set_pin_base() and sm_config_set_set_pin_count().
•
Added sm_config_set_sideset_pin_base() and sm_config_set_sideset_pin_count().
•
For PICO_PICO_VERSION=1 i.e. RP2350:
◦
Added pio_set_gpio_base() and pio_get_gpio_base() to assign the PIO instance to pins 0-31 or 16-47.
◦
Added pio_set_sm_multi_mask_enabled().
◦
Added pio_clkdiv_restart_sm_multi_mask().
◦
Added pio_enable_sm_multi_mask_in_sync().
•
NUM_PIO_IRQS define is now provided for you (2 on both RP2040 and RP2350).
hardware_pll
•
PICO_PLL_VCO_MIN_FREQ_HZ is new and now preferred to PICO_PLL_VCO_MIN_FREQ_KHZ or PICO_PLL_VCO_MIN_FREQ_MHZ.
•
PICO_PLL_VCO_MAX_FREQ_HZ is new and now preferred to PICO_PLL_VCO_MAX_FREQ_KHZ or PICO_PLL_VCO_MAX_FREQ_MHZ.
•
PLL_RESET_NUM() macro added to abstract differences between platforms.
hardware_pwm
•
PARAM_ASSERTIONS_ENABLED_PWM is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_PWM - the old define is still supported as
a fallback.
•
PICO_DEFAULT_PWM_INSTANCE() macro added which is equivalent to the pre-existing pwm_default.
•
Added PWM_SLICE_NUM() and PWM_DREQ_NUM() macros to abstract differences between platforms.
•
Added PWM_DEFAULT_IRQ_NUM() since RP2350 supports 2 PWM IRQs to indicate which IRQ the pre-existing RP2040
functions use.
•
Added pwm_set_irq0_enabled(), pwm_set_irq1_enabled() and pwm_irqn_set_slice_enabled() to differentiate between the
IRQs.
•
Added pwm_set_irq0_mask_enabled(), pwm_set_irq1_mask_enabled() and pwm_irqn_set_mask_enabled() to differentiate
between the IRQs.
•
Added pwm_get_irq0_status_mask(), pwm_get_irq1_status_mask() and pwm_irqn_get_status_mask() to differentiate between
the IRQs.
•
Added pwm_pwm_force_irq0(), pwm_force_irq1() and pwm_irqn_force() to differentiate between the IRQs.
hardware_resets
•
PARAM_ASSERTIONS_ENABLED_RESETS is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_RESETS - the old define is still
supported as a fallback.
•
reset_block() is renamed to reset_block_mask() but the old name is still supported.
•
unreset_block() is renamed to unreset_block_mask() but the old name is still supported.
•
unreset_block_wait() is renamed to unreset_block_mask_wait_blocking() but the old name is still supported.
•
reset_block_num(), unreset_block_num(), unreset_block_num_wait_blocking() and reset_unreset_block_num_wait_blocking()
added to reset or unreset a single block by reset_num_t index.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 640

hardware_rtc
•
Note this library is only available on RP2040, since the RP2350 lacks the RTC hardware.
•
There is a similar always-on timer in hardware_powman.
•
A common API for both RP2040 and RP2350 is provided in pico_aon_timer.
•
HAS_RP2040_RTC define is now provided for you.
hardware_spi
•
PARAM_ASSERTIONS_ENABLED_SPI is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_SPI - the old define is still supported as
a fallback.
•
PICO_DEFAULT_SPI_INSTANCE() macro added which is equivalent to the pre-existing spi_default.
•
Added SPI_NUM(), SPI_INSTANCE(), SPI_DREQ_NUM() macros to abstract differences between platforms.
•
Fixed per-character timeouts.
hardware_sync
•
restore_interrupts_from_disabled() is added as a variant for restore_interrupts() which must be paired with a
matching save_and_disable_interrupts(). This is the common usage and produces smaller/faster code on RISC-V.
•
Spinlock functionality has been delegated to a separate hardware_sync_spinlock library, which is included for you.
•
hardware_sync_spin_lock.
◦
Whilst RP2350 has the same SIO spin locks as RP2040, due to Errata RP2350-E2, these are not used by
default.
◦
Instead, a software implementation using atomic instructions is used.
◦
You can set PICO_USE_SW_SPIN_LOCKS=0 to disable this if you know you aren’t affected by RP2350-E2 and want to
use the h/w spin locks instead.
◦
Added spin_try_lock_unsafe() function.
hardware_timer
•
PARAM_ASSERTIONS_ENABLED_TIMER is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_TIMER - the old define is still
supported as a fallback.
•
RP2350 supports two timer instances.
◦
PICO_DEFAULT_TIMER_INSTANCE() macro added based on PICO_DEFAULT_TIMER (0 on RP2040, 0/1 on RP2350).
◦
Added TIMER_NUM(), TIMER_INSTANCE(), TIMER_ALARM_NUM_FROM_IRQ() and TIMER_ALARM_NUM_FROM_IRQ() macros to
abstract differences between platforms
◦
Added hardware_alarm_get_irq_num() to get the processor IRQ number for a particular alarm on a timer.
◦
New versions of all functions added with a timer_ prefix and a timer instance passed as the first argument.
The pre-existing functions call these with the default timer instance.
•
NUM_TIMERS has been renamed to NUM_ALARMS as that’s what it was (4).
•
NUM_GENERIC_TIMERS has been added which is 1 on RP2040 and 2 on RP2350.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 641

hardware_uart
•
PARAM_ASSERTIONS_ENABLED_UART is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_UART - the old define is still supported
as a fallback.
•
PICO_DEFAULT_UART_INSTANCE() macro added which is equivalent to the pre-existing uart_default.
•
Added UART_NUM(), UART_INSTANCE(), UART_DREQ_NUM(), UART_IRQ_NUM(), UART_CLOCK_NUM(), UART_RESET_NUM(),
UART_FUNCSEL_NUM() macros to abstract differences between platforms.
•
uart_set_irq_enables() is renamed to uart_set_irqs_enabled() but the old name is still supported.
•
uart_get_dreq() is renamed to uart_get_dreq_num() but the old name is still supported.
•
uart_get_reset_num() is added.
•
Incorrect baud setting for certain frequencies was fixed.
hardware_vreg
•
vreg_disable_voltage_limit() added to allow full range of DVDD voltage selection on RP2350
hardware_watchdog
•
PARAM_ASSERTIONS_ENABLED_WATCHDOG is renamed to PARAM_ASSERTIONS_ENABLED_HARDWARE_WATCHDOG - the old define is still
supported as a fallback.
•
Added watchdog_disable().
•
watchdog_get_count() is renamed to watchdog_get_time_remaining_ms() but the old name is still supported. =====
hardware_xosc
•
XOSC_HZ is new and now preferred to XOSC_KHZ.
hardware_regs
•
enum irq_num_[rp2040|rp2350] (typedef-ed as irq_num_t) added with the constants from inctrl.h. Note these remain
as #defines when included from assembly.
•
enum dreq_num_[rp2040|rp2350] (typedef-ed as dreq_num_t) added with the constants from dreq.h. Note these remain
as #defines when included from assembly.
hardware_structs
•
enum bus_ctrl_perf_counter_[rp2040|rp2350] (typedef-ed as bus_ctrl_perf_counter_t) added.
◦
Note enum bus_ctrl_per_counter no longer exists.
•
enum clock_num_[rp2040|rp2350] (typedef-ed as clock_num_t) added.
◦
Note enum clock_index no longer exists.
•
enum clock_dest_num_[rp2040|rp2350] (typedef-ed as clock_dest_num_t) added.
•
enum gpio_function_[rp2040|rp2350] (typedef-ed as gpio_function_t) added.
◦
Note enum gpio_function no longer exists.
•
enum gpio_function1_[rp2040|rp2350] (typedef-ed as gpio_function1_t) added (for QSPI bank).
•
enum reset_num_[rp2040|rp2350] (typedef-ed as reset_num_t) added.
•
enum tick_gen_num_rp2350 (typedef-ed as reset_num_t) added.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 642

•
Various naming consistencies have been fixed.
◦
iobank0.h → io_bank00.h, iobank0_hw → io_bank0_hw - shims are provided for the old versions.
◦
ioqspi.h → io_qspi0.h, ioqspi_hw → io_qspi_hw - shims are provided for the old versions.
◦
padsbank0.h → pads_bank0.h, padsbank0_hw → pads_bank0_hw - shims are provided for the old versions.
◦
padsqspi.h → pads_qspi.h, padsqspi_hw → pads_qspi_hw - shims are provided for the old versions.
◦
bus_ctrl.h → busctrl.h, bus_ctrl_hw → busctrl_hw (don’t ask! but hardware_struct headers now match
hardware_regs names at least!).
boot_stage2
•
There are now separate implementations for RP2040 and RP2350.
•
A boot_stage2 is not needed on RP2350, but one can be included via the define PICO_EMBED_XIP_SETUP=1.
cmsis
•
CMSIS headers are updated to CMSIS 6.1
•
Device headers RP2040.h and RP2350.h are generated, and now include basic hardware structures as per the latest
SVDConv defaults.
pico_bootrom
•
New RP2350 bootrom APIs added.
•
rom_xxx() inline function wrappers added for all xxx() ROM functions.
•
Additional rom_get_boot_random() and rom_add_flash_runtime_partition() for RP2350 which use underlying bootrom
functionality but aren’t just wrapper functions.
pico_bt_stack
•
BTStack updated to 1.6.1 from 1.5.6
◦
Lots of additions, fixes and changes, for the full list see the change log
pico_cyw43_arch
•
PARAM_ASSERTIONS_ENABLED_CYW43_ARCH is renamed to PARAM_ASSERTIONS_ENABLED_PICO_CYW43_ARCH - the old define is still
supported as a fallback.
•
lib/cyw43-driver has been updated to the latest version
◦
Mostly bug fixes.
◦
Adds WPA3 support for Pico W. To use this, use CYW43_AUTH_WPA3_SAE_AES_PSK or
CYW43_AUTH_WPA3_WPA2_AES_PSK instead of CYW43_AUTH_WPA2_AES_PSK when connecting to wifi
with cyw43_arch_wifi_connect_timeout_ms or cyw43_arch_enable_ap_mode.
pico_cyw43_driver
•
cyw43_driver updated to commit faf36381.
•
Added support for changing the clock speed of the SPI connection to the Wi-Fi chip. See CYW43_PIO_CLOCK_DIV_INT,
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 643

CYW43_PIO_CLOCK_DIV_FRAC and CYW43_PIO_CLOCK_DIV_DYNAMIC.
pico_divider
•
Functions that returned a quotient and divider in a uint64_t or int64_t now return a divmod_result_t - the signed-ness
of the value before was meaningless anyway, and the compiler will still return it as a 64-bit value.
•
Extra functions in pico/divider.h now implemented for pico_set_divider_implemtation(compiler) as well as for
RP2350 which has no RP2040 hardware divider.
pico_double
•
pico_set_double_implementation(pico) (the default) now uses the Double Co-Processor (DCP) for double-precision
floating-point arithmetic on Arm RP2350, and highly optimised Arm VFP implementations of the double-precision
scientific functions, for much improved performance over the C library versions.
•
Extra functions exposed from pico implementation
◦
int2double()
◦
uint2double()
◦
int642double()
◦
uint642double()
◦
double2uint()
◦
double2uint64()
•
Extra functions exposed from pico implementation for Arm RP2350 only
◦
ddiv_fast()
◦
sqrt_fast()
◦
mla()
pico_float
•
pico_set_float_implementation(pico) (the default) now uses the compiler for single-precision floating point arithmetic
on Arm RP2350 since the processor has VFP instructions, but includes custom optimised scientific functions also
using the VFP.
•
pico_set_diouble_implementation(pico_dcp) uses the Double Co-Processor (DCP) for single-precision floating point
arithmetic on Arm RP2350, and highly optimised Arm M33 implementations of the single-precision scientific
functions, for much improved performance over the C library versions. This library is intended for those situations
where you cannot (or don’t want to) use the VFP instructions.
•
Extra functions exposed from pico implementation.
◦
int2float()
◦
uint2float()
◦
int642float()
◦
uint642float()
◦
float2uint()
◦
float2uint64()
◦
float2uint_z()
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 644

◦
float2uint64_z()
•
Extra functions exposed from pico implementation for Arm R2350 only.
◦
float2fix64_z()
◦
fdiv_fast()
◦
fsqrt_fast()
pico_lwip
•
Update lib/lwip to 2.2.0
◦
There have been some bugs fixed, and some new features were added (most notably full Address Conflict
Detection support).
pico_mbedtls
•
Update to lib/mbedtls to 2.28.8 from 2.28.1
◦
This release of Mbed TLS provides bug fixes and minor enhancements. This release includes fixes for
security issues.
•
Added support for hardware SHA256 calculation on RP2350
◦
To use this in mbedtls you need to define MBEDTLS_SHA256_ALT in your mbedtls_config.h. Use
LIB_PICO_SHA256 to check if hardware SHA256 is supported and fallback to defining MBEDTLS_SHA256_C
for the software SHA256 calculation.
pico_multicore
•
Added SIO_FIFO_IRQ_NUM() to get the IRQ number for the FIFO IRQ on a particular core, since RP2040 and RP2350
are different.
◦
note that RP2350 uses the same IRQ number on both cores, so if you have IRQ handlers for both cores, you
should share the same function and check the core number in the IRQ handler. This strategy of course works
on RP2040 too.
•
Added multicore_fifo_push_blocking_inline() and multicore_fifo_pop_blocking_inline().
•
Added multicore_doorbell_ functions for the new intercore Doorbells on RP2350.
◦
NUM_DOORBELLS is provided which is 8 on RP2350, 0 on RP2040.
pico_rand
•
Added the hardware TRNG as an additional entropy source on RP2350.
◦
HAS_RP2350_TRNG indicates hardware support.
•
Many, but not all, of the pre-existing entropy sources are disabled on RP2350 in favour of using the TRNG.
pico_runtime
•
A shadow of its former self, it now just:
◦
aggregates other default libraries required for getting to main() and having the C runtime work.
◦
provides low level runtime_run_initializers() and runtime_run_per_core_initializers() which run initializers from
the __preinit_array.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 645

•
The runtime_init() entrypoint has moved to pico_clib_interface.
pico_standard_link
•
Much previously included functionality has been split out into pico_crt0, pico_cxx_options and
pico_standard_binary_info.
•
What remains is entirely focused on setting up the linker configuration.
•
Finally fixed a bug where changes to the linker script did not cause a relink.
pico_stdio
•
Some internal reorganisation to separate functionality between here and pico_clib_interface.
•
Added PICO_STDIO_SHORT_CIRCUIT_CLIB_FUNCS to control whether printf, vprintf, puts, putchar and getchar go thru the C
library (thus usually pulling in all the FILE handling APIs resulting in huge bloat - but more sensible behaviour when
mixing say printf with fprintf(stdout etc.) This defaults to 0, i.e. "do short-circuit the c lib" which was the behaviour
in the previous SDK version.
•
Add support for Segger RTT stdio.
•
Implemented stdio_flush() for UART and USB CDC.
•
Added stdio_deinit_all() and individual stdio_deinit_xxx functions.
pico_stdio_usb
•
Now supports MS OS2 descriptors by default. See PICO_STDIO_USB_RESET_INTERFACE_SUPPORT_MS_OS_20_DESCRIPTOR.
•
PICO_STDIO_USB_ENABLE_RESET_VIA_VENDOR_INTERFACE and PICO_STDIO_USB_ENABLE_RESET_VIA_BAUD_RATE are now both
supported even if the user is using tinyusb_device directly themselves.
•
Bug that could cause deadlock with FreeRTOS SMP and printing from IRQs fixed.
pico_stdlib
•
pico/stdlib.h no longer declares set_sys_clock_ functions. You must include hardware/clocks.h explicitly.
pico_time
•
remaining_alarm_time_ms(), remaining_alarm_time_us(), alarm_pool_remaining_alarm_time_ms() and
alarm_pool_remaining_alarm_time_us() were added.
•
Implementation of alarm pools completely rewritten for much lower overhead, jitter and higher throughput in the
majority of cases. The pairing heap has been replaced with a linked list which is faster and uses less memory in
most normal use cases too.
•
NOTE fire_if_past now always fires asynchronously in the same way as a normal timeout (rather than being called
synchronously during the call). Thus alarm_pool_add_alarm_at_force_in_context is now no different to
alarm_pool_add_alarm_at.
•
New pico_timer_adapter abstraction added so pico_time could be backed by other types of timer hardware in the
future, and so pico_time no longer depends directly on a hardware_timer abstraction which simplifies
PICO_PLATFORM=host.
•
Support for two hardware timer blocks on RP2350.
◦
alarm_pool_timer_t abstraction added to represent the time "counter" backing the alarm pool.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 646

◦
alarm_pool_t now has an associated alarm_pool_timer_t instance.
◦
alarm_pool_create_on_timer() is added to create an alarm pool on a specific alarm pool timer.
◦
alarm_pool_get_default_timer() is added which is used when not explicitly passing an alarm pool timer.
PICO_DEFAULT_TIMER selects which timer instance is the default (0 on RP2040, 0/1 on RP2350).
•
PARAM_ASSERTIONS_ENABLED_TIME is renamed to PARAM_ASSERTIONS_ENABLED_PICO_TIME - the old define is still supported as a
fallback.
•
check_timeout_fn now takes two parameters. This was likely unused outside the pico_time implementation anyway.
•
Expose runtime_init_default_alarm_pool() function.
pico_util
•
time_to_datetime(), datetime_to_time() and datetime_to_str() functions relating to hardware_rtc are now guarded by
PICO_INCLUDE_RTC_DATETIME which defaults to 0 on RP2350, since RP2350 does not include the RP2040 RTC
hardware.
•
timespec_to_ms(), timespec_to_us(), ms_to_timespec(), and ms_to_timespec() added to convert between C-library high-
resolution time offset and millisecond or microsecond precision offsets.
•
queue_try_remove(), queue_remove_blocking() and queue_peek_blocking() now support passing NULL as the element out
pointer if the caller doesn’t care.
tinyusb
•
TinyUSB moved from release 0.15.0 to commit 42326428 (0.17.0 WIP)
•
Note that bsp/board.h has been renamed by TinyUSB to bsp/board_api.h the SDK adds a re-director header for you for
now.
•
Support added for RP2350. Requires a custom memcpy implementation in the rp2040 tinusb driver, as unaligned
32 bit access to device memory causes a hard fault on the Cortex M33.
•
See the TinyUSB changelog for full details.
pioasm
•
pioasm now supports the full RP2350 PIO (PICO_PIO_VERSION=1) instruction set
•
Additionally, it supports many new directives. See the RP2350 Datasheet for full details.
•
Note that currently not all output formats support PICO_PIO_VERSION=1 as they are community provided.
FreeRTOS integration
•
You should use this repo for the current FreeRTOS-Kernel supporting RP2040 and RP2350: https://github.com/
raspberrypi/FreeRTOS-Kernel
•
Dropped legacy support for configNUM_CORES for the correct configNUMBER_OF_CORES, which is 2 for SMP support and 1
for non-SMP support.
•
RP2350_ARM_NTZ (non-trust-zone), and RP2350_RISC-V are available as well as an updated RP2040 version; the
former two basically give you the same "single privilege/security domain" experience as on RP2040.
•
SMP and non-SMP support (along with running FreeRTOS on either core) are available for all.
•
A nasty, but rare pre-existing RP2040 deadlock (especially with TinyUSB printf from IRQs) has been fixed on all
three versions; If you were setting configSUPPORT_PICO_SYNC_INTEROP=0 as a workaround, you should no
longer do so. Generally, if you are using printf (or anything else using SDK locking primitives) then you do really
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 647

want configSUPPORT_PICO_SYNC_INTEROP=1 for the best concurrency
•
FreeRTOS on RISC-V does not currently support IRQ preemption (which is a Hazard3 only feature anyway).
Backwards Incompatibilities
There are a handful of minor backwards incompatibilities, that hopefully should affect very few people.
•
boot_picobin library is now called boot_picobin_headers.
•
boot picoboot library is now called boot_picoboot_headers.
•
boot_uf2 library is now called boot_uf2_headers.
•
pico_base library is now called pico_base_headers.
◦
pico/error.h - PICO_ERROR_GENERIC is now -1 because there were pre-existing APIs that returned -1 for any error.
PICO_ERROR_TIMEOUT is now -2 (they are swapped from their previous values).
•
pico_stdlib
◦
pico/stdlib.h no longer declares set_sys_clock_ functions. You must include hardware/clocks.h explicitly.
•
pico_time
◦
check_timeout_fn now takes two parameters. This was likely unused outside the pico_time implementation
anyway.
◦
fire_if_past now always fires asynchronously in the same way as a normal timeout (rather than being called
synchronously during the call). Thus alarm_pool_add_alarm_at_force_in_context is now no different to
alarm_pool_add_alarm_at.
•
hardware_clocks
◦
The enum clock_index no longer exists and has been replaced with clock_num_t. However, all clock functions
now take clock_handle_t to allow for future enhancement. This is currently just an alias for clock_num_t.
•
hardware_structs
◦
enum bus_ctrl_perf_counter_[rp2040|rp2350] (typedef-ed as bus_ctrl_perf_counter_t) added.
◦
Note enum bus_ctrl_per_counter no longer exists.
◦
enum clock_num_[rp2040|rp2350] (typedef-ed as clock_num_t) added.
◦
Note enum clock_index no longer exists.
◦
enum clock_dest_num_[rp2040|rp2350] (typedef-ed as clock_dest_num_t) added.
◦
enum gpio_function_[rp2040|rp2350] (typedef-ed as gpio_function_t) added.
◦
Note enum gpio_function no longer exists.
•
hardware_timer
•
NUM_TIMERS has been renamed to NUM_ALARMS as that’s what it was (4).
Build
•
There are major CMake build changes. If you are maintaining your own non-CMake build, you will have to make
extensive changes by looking at the differences yourself.
•
All SDK headers are now "system" includes.
•
You can now specify rp2350-arm-s (Arm Secure) and rp2350-riscv (RISC-V) as well as the previous rp2040 (default)
and host.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 648

•
Setting PICO_BOARD=some_board will now set PICO_PLATFORM if one is specified in some_board.h since most boards either
use exclusively RP2040 or RP2350.
•
PICO_PLATFORM also supports rp2350 but this gets replaced with the value PICO_DEFAULT_RP2350_PLATFORM which you can
set in your environment or CMakeLists.txt. Many of the boards for RP2350 - including pico2- select rp2350 as the
PICO_BOARD to honour your preference.
•
PICO_PLATFORM, PICO_BOARD and other variables will be taken from your environment if not otherwise defined now
retain their value after the first CMake invocation. i.e. a pre-existing CMake build configuration directory will not
change based on your environment if you re-run cmake.
•
PICO_BOARD=pico_w is no longer an odd child out requiring a CMake board file; support for CYW43 Wi-Fi can now be
specified in the board header.
•
ELF2UF2 is now replaced by use of picotool which will be built as part of your build if not installed on the system. See
the picotool GitHub repository for more details on building and installing it locally.
•
PICO_GCC_TRIPLE can now be a ';' separated list as well as a single value.
•
NOTE: This release of the SDK does not support writing Arm Non-Secure binaries to run under the wing of an Arm
Secure binary. This support will be added in a subsequent release.
•
Compiler support is widening - we always recommend a recent version.)
•
All recent GCCs are supported on Arm. (GCC 14 has not yet been tested for full support though).
◦
Very recent GCCs are required on RISC-V due to the bleeding-edge nature of some of the processor
instructions.
◦
Recent LLVM Embedded Toolchain for ArmRM versions are supported on Arm.
◦
Pigweed LLVM is supported for Arm.
◦
For further details see the Raspberry Pi Pico-series C/C++ SDK book.
•
Bazel may be used to build the SDK on Arm. See the README. Note that the Bazel build is community-provided and
maintained.
Building Documentation
•
The docs build target to build the HTML code documentation now builds a set of documentation peculiar to your
particular PICO_PLATFORM setting.
•
PICO_PLATFORM=combined-docs can be used (just for building docs) to build the combined documentation for both
RP2040 and RP2350.
Fixed Issues
You can see a list of individual commits here, and a list of resolved issues here.
Note these only include public changes made since version 1.5.1. The majority of new code and collateral fixes for the
previously unannounced RP2350 were developed and committed in private and delivered as a single "squashed"
commit.
Raspberry Pi Pico-series C/C++ SDK
Release 2.0.0 (08/Aug/2024) 649

Appendix D: Documentation release
history
Table 55.
Documentation
release history
Release Date Description
1.0 21 Jan 2021
•
Initial release
1.1 26 Jan 2021
•
Minor corrections
•
Extra information about using DMA with ADC
•
Clarified M0+ and SIO CPUID registers
•
Added more discussion of Timers
•
Update Windows and macOS build instructions
•
Renamed books and optimised size of output PDFs
1.2 01 Feb 2021
•
Minor corrections
•
Small improvements to PIO documentation
•
Added missing TIMER2 and TIMER3 registers to DMA
•
Explained how to get MicroPython REPL on UART
•
To accompany the V1.0.1 release of the C SDK
1.3 23 Feb 2021
•
Minor corrections
•
Changed font
•
Additional documentation on sink/source limits for RP2040
•
Major improvements to SWD documentation
•
Updated MicroPython build instructions
•
MicroPython UART example code
•
Updated Thonny instructions
•
Updated Project Generator instructions
•
Added a FAQ document
•
Added errata E7, E8 and E9
1.3.1 05 Mar 2021
•
Minor corrections
•
To accompany the V1.1.0 release of the C SDK
•
Improved MicroPython UART example
•
Improved Pinout diagram
1.4 07 Apr 2021
•
Minor corrections
•
Added errata E10
•
Note about how to update the C SDK from Github
•
To accompany the V1.1.2 release of the C SDK
Raspberry Pi Pico-series C/C++ SDK
Appendix D: Documentation release history 650

Release Date Description
1.4.1 13 Apr 2021
•
Minor corrections
•
Clarified that all source code in the documentation is under the
3-Clause BSD license.
1.5 07 Jun 2021
•
Minor updates and corrections
•
Updated FAQ
•
Added SDK release history
•
To accompany the V1.2.0 release of the C SDK
1.6 23 Jun 2021
•
Minor updates and corrections
•
ADC information updated
•
Added errata E11
1.6.1 30 Sep 2021
•
Minor updates and corrections
•
Information about B2 release
•
Updated errata for B2 release
1.7 03 Nov 2021
•
Minor updates and corrections
•
Fixed some register access types and descriptions
•
Added core 1 launch sequence info
•
Described SDK "panic" handling
•
Updated picotool documentation
•
Additional examples added to Appendix A: App Notes appendix
in the Raspberry Pi Pico-series C/C++ SDK book
•
To accompany the V1.3.0 release of the C SDK
1.7.1 04 Nov 2021
•
Minor updates and corrections
•
Better documentation of USB double buffering
•
Picoprobe branch changes
•
Updated links to documentation
1.8 17 Jun 2022
•
Minor updates and corrections
•
Updated setup instructions for Windows in Getting started with
Raspberry Pi Pico-series
•
Additional explanation of SDK configuration
•
RP2350 now qualified to -40°C, minimum operating temperature
changed from -20°C to -40°C
•
Increased PLL min VCO from 400MHz to 750MHz for improved
stability across operating conditions
•
Added reflow-soldering temperature profile
•
Added errata E12, E13 and E14
•
To accompany the V1.3.1 release of the C SDK
Raspberry Pi Pico-series C/C++ SDK
Appendix D: Documentation release history 651

Release Date Description
1.9 30 Jun 2022
•
Minor updates and corrections
•
Update to VGA board hardware description for launch of
Raspberry Pi Pico W
•
To accompany the V1.4.0 release of the C SDK
Pico and Pico W databooks combined into a unified release history
2.0 01 Dec 2022
•
Minor updates and corrections
•
Added RP2040 availability information
•
Added RP2040 storage conditions and thermal characteristics
•
Replace SDK library documentation with links to the online
version
•
Updated Picoprobe build and usage instructions
2.1 03 Mar 2023
•
A large number of minor updates and corrections
•
SMT footprint of Pico W corrected
•
Updated for the 1.5.0 release of the Raspberry Pi Pico C SDK
•
Added errata E15
•
Added documentation around the new Pico Windows Installer
•
Added documentation around the Pico-W-Go extension for
Python development
•
Added a wireless networking example to the Python
documentation
•
Added package marking specifications
•
Added RP2040 baseline power consumption figures
•
Added antenna keep out diagram to Pico W datasheet
2.2 14 Jun 2023
•
Minor updates and corrections
•
Updated for the 1.5.1 release of the Raspberry Pi Pico C SDK
•
Documentation around Bluetooth support for Pico W
2.3 02 Feb 2024
•
Numerous minor updates and corrections
•
Update ROSC register information
•
Updated getting started documentation for MS Windows and
Apple macOS
•
Updates arising from the release of Raspberry Pi 5
•
Reintroduced updated SDK library documentation (was
withdrawn in 2.0 due to XML conflicts)
•
Updated to include the new recommended part number for
crystals used with RP2040
•
Added new paste stencil information for Pico and Pico W
•
Other updates to supporting documentation
Raspberry Pi Pico-series C/C++ SDK
Appendix D: Documentation release history 652
Release Date Description
2.4 02 May 2024
•
Numerous minor updates and corrections
•
Formatting fixes for Pico C SDK API level documentation
•
Renamed picoprobe firmware to debugprobe
•
Clarified that CMake build configuration uses cache variables,
not configuration variables
•
Fixed incorrect parameter names used in the @asm_pio decorator
and StateMachine initialiser examples
•
Expanded MicroPython rshell examples to include a complete
guide on loading and running programs on your device
•
Added an example that demonstrates how to reset a Pico from
the command line using OpenOCD
•
Enhanced VS Code MicroPico plugin documentation to reflect
the plugin’s new name, removal of the built-in FTP server, and
some additional usage instruction
•
Added documentation on the official Raspberry Pi Pico VS Code
extension.
3.0 07 Jul 2024
•
Added support for RP2350 and Pico 2
The latest release can be found at https://datasheets.raspberrypi.com/pico/raspberry-pi-pico-c-sdk.pdf.
Raspberry Pi Pico-series C/C++ SDK
Appendix D: Documentation release history 653

